
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (11): 3422-3435.doi: 10.12382/bgxb.2023.0830
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
ZHANG Qi1, GE Yuxue1,*( ), LI Pan2, KANG Qijun1, PEI Yang1
), LI Pan2, KANG Qijun1, PEI Yang1
Received:2023-08-30
Online:2023-11-04
Contact:
GE Yuxue
CLC Number:
ZHANG Qi, GE Yuxue, LI Pan, KANG Qijun, PEI Yang. Evaluation Method for SoS Contribution Rate of All-optical UAV Swarm Based on ABMS[J]. Acta Armamentarii, 2023, 44(11): 3422-3435.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Evaluating process

Fig.2 Framework model of all-optical UAV agent
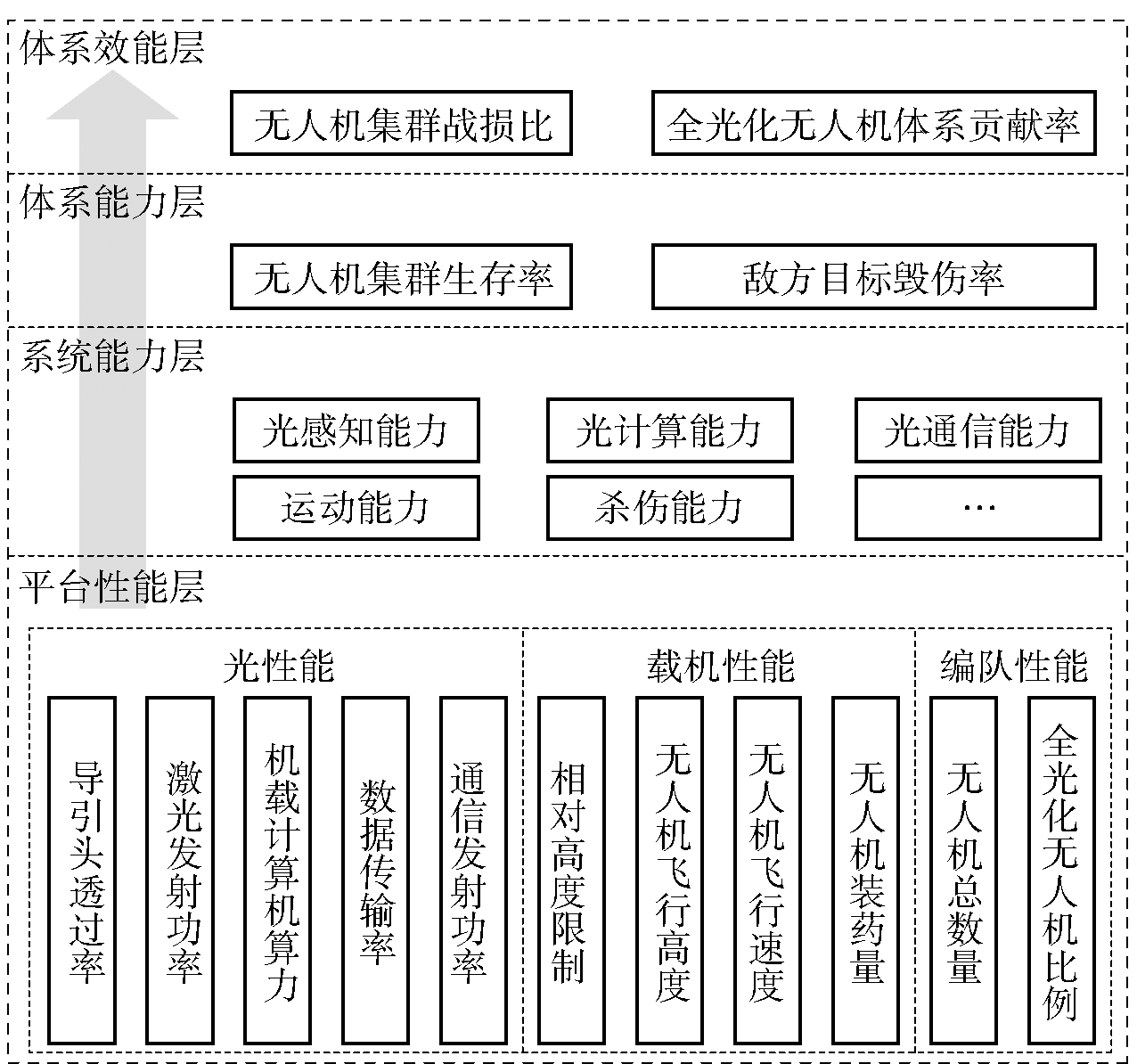
Fig.3 Evaluation index system of all-optical UAV

Fig.4 Demonstration of combat units and their relationship

Fig.5 Behaviour model of all-optical UAV agent

Fig.6 Schematic diagram of laser seeker

Fig.7 Flow chart of three-dimensional path planning algorithm

Fig.8 Three-dimensional terrain modelling

Fig.9 Demonstration of feasible region

Fig.10 Behaviour model of missile agent

Fig.11 Behaviour model of command center agent

Fig.12 Behaviour model of enemy targets agent

Fig.13 Interface of the simulation
| 作战单元 | 参数 | 数值 |
|---|---|---|
| 全光化无人机集群 | 无人机总数量 | 50 |
| 全光化无人机比例/% | 50, 100 | |
| 感知距离/km | 20 | |
| 全光化无人机 | 识别确认概率 | 0.9 |
| 通信距离/km | 20 | |
| 相对高度限制/m | 50~200 | |
| 常规无人机 | 感知距离/km | 10 |
| 相对高度限制/m | 50~200 | |
| 数量 | 7 | |
| 敌方目标 | 干扰距离/km | 20 |
| 干扰强度 | 0.5 |
Table 1 Parameters in the simulation
| 作战单元 | 参数 | 数值 |
|---|---|---|
| 全光化无人机集群 | 无人机总数量 | 50 |
| 全光化无人机比例/% | 50, 100 | |
| 感知距离/km | 20 | |
| 全光化无人机 | 识别确认概率 | 0.9 |
| 通信距离/km | 20 | |
| 相对高度限制/m | 50~200 | |
| 常规无人机 | 感知距离/km | 10 |
| 相对高度限制/m | 50~200 | |
| 数量 | 7 | |
| 敌方目标 | 干扰距离/km | 20 |
| 干扰强度 | 0.5 |

Fig.14 Analysis on the variation of index value with the number of experiments
| 实验 组号 | 全光化 无人机感知 距离/km | 全光化 无人机通信 距离/km | 集群 无人机 总数量 | 全光化 无人机所占 比例/% |
|---|---|---|---|---|
| 1 | 10~30 | 20 | 50 | 0, 50, 100 |
| 2 | 20 | 10~30 | 50 | 0, 50, 100 |
| 3 | 20 | 20 | 10~60 | 0, 50, 100 |
| 4 | 20 | 20 | 50 | 0~100 |
Table 2 Design of the experiment
| 实验 组号 | 全光化 无人机感知 距离/km | 全光化 无人机通信 距离/km | 集群 无人机 总数量 | 全光化 无人机所占 比例/% |
|---|---|---|---|---|
| 1 | 10~30 | 20 | 50 | 0, 50, 100 |
| 2 | 20 | 10~30 | 50 | 0, 50, 100 |
| 3 | 20 | 20 | 10~60 | 0, 50, 100 |
| 4 | 20 | 20 | 50 | 0~100 |

Fig.15 Analysis on the influence of perception distance of all-optical UAV

Fig.16 Analysis on the influence of communication distance of all-optical UAV
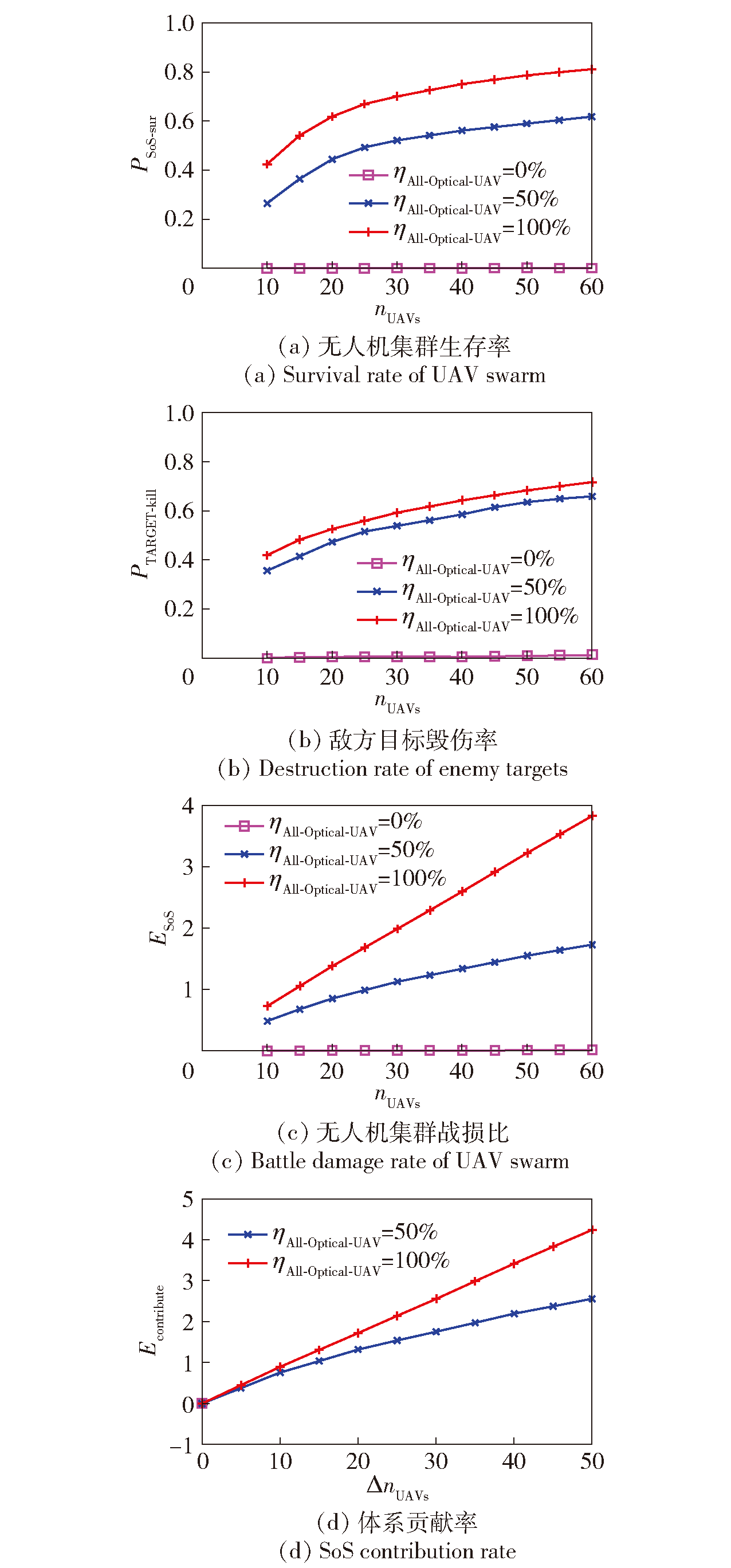
Fig.17 Analysis on the influence of the number of UAV in swarm

Fig.18 Analysis on the influence of the proportion of all-optical UAV
| [1] |
毛军, 付浩, 褚超群, 等. 惯性/视觉/激光雷达SLAM技术综述[J]. 导航定位与授时, 2022, 9(4):17-30.
|
|
|
|
| [2] |
潘时龙, 张亚梅. 微波光子雷达及关键技术[J]. 科技导报, 2017, 35(20):36-52.
|
|
|
|
| [3] |
郭光灿, 陈以鹏, 王琴. 量子计算机研究进展[J]. 南京邮电大学学报(自然科学版), 2020, 40(5):3-10.
|
|
|
|
| [4] |
王天枢, 林鹏, 董芳, 等. 空间激光通信技术发展现状及展望[J]. 中国工程科学, 2020, 22(3):92-99.
|
|
doi: 10.15302/J-SSCAE-2020.03.014 URL |
|
| [5] |
杨克巍, 杨志伟, 谭跃进, 等. 面向体系贡献率的装备体系评估方法研究综述[J]. 系统工程与电子技术, 2019, 41(2):311-321.
|
|
doi: 10.3969/j.issn.1001-506X.2019.02.13 |
|
| [6] |
doi: 10.1177/1548512915592517 URL |
| [7] |
doi: 10.1051/matecconf/20165201001 URL |
| [8] |
刘文金, 裴扬, 葛玉雪, 等. 基于ABMS的对地攻击型无人机体系贡献率评估[J]. 航空学报, 2022, 43(9):225972.
doi: 10.7527/S1000-6893.2021.25972 |
|
|
|
| [9] |
doi: 10.1177/1548512912466319 URL |
| [10] |
|
| [11] |
张睿文, 宋笔锋, 裴扬, 等. 基于ABMS的飞机拦截作战效能评估方法[J]. 系统工程与电子技术, 2018, 40(2):322-329.
|
|
|
|
| [12] |
doi: 10.1016/j.eswa.2021.115976 URL |
| [13] |
doi: 10.2514/1.I010149 URL |
| [14] |
doi: 10.21629/JSEE.2019.04.10 |
| [15] |
罗承昆, 陈云翔, 项华春, 等. 装备体系贡献率评估方法研究综述[J]. 系统工程与电子技术, 2019, 41(8):1789-1794.
doi: 10.3969/j.issn.1001-506X.2019.08.16 |
|
|
|
| [16] |
杨克巍, 杨志伟, 谭跃进, 等. 面向体系贡献率的装备体系评估方法研究综述[J]. 系统工程与电子技术, 2019, 41(2):311-321.
|
|
doi: 10.3969/j.issn.1001-506X.2019.02.13 |
|
| [17] |
李际超, 杨克巍, 张小可, 等. 基于武器装备体系作战网络模型的装备贡献度评估[J]. 复杂系统与复杂性科学, 2016, 13(3):1-7.
|
|
|
|
| [18] |
罗小明, 杨娟, 何榕. 基于任务-能力-结构-演化的武器装备体系贡献度评估与示例分析[J]. 装备学院学报, 2016, 27(3):7-13.
|
|
|
|
| [19] |
许秉军, 李孟军, 李兴兵, 等. 装甲装备体系对抗仿真评估系统研究[C]// 中国自动化学会系统仿真专业委员会, 中国系统仿真学会仿真应用专业委员会 2007系统仿真技术及其应用学术会议论文集. 合肥: 中国科学技术大学出版社, 2007.
|
|
|
|
| [20] |
俞锦涛, 肖兵, 崔玉竹, 等. 基于时序网络仿真和贡献率的预警作战体系任务支持能力评估[J/OL]. 兵工学报:1-14[2023-09-15]. http://kns.cnki.net/kcms/detail/11.2176.tj.20230207.1410.004.html.
|
|
|
|
| [21] |
李峻森, 方依宁, 张云安, 等. 面向任务的装备保障体系多Agent建模与评估方法[J]. 系统工程与电子技术, 2023, 45(1):279-290.
doi: 10.12305/j.issn.1001-506X.2023.01.33 |
|
doi: 10.12305/j.issn.1001-506X.2023.01.33 |
|
| [22] |
|
| [23] |
doi: 10.1109/Access.6287639 URL |
| [24] |
庞维建, 李辉, 黄谦, 等. 集群无人机要地攻防作战Multi-Agent建模仿真分析[J]. 信息工程大学学报, 2022, 23(5):617-625.
|
|
|
|
| [25] |
俞锦涛, 肖兵, 崔玉竹. 基于节点重要性和改进效能环的防空反导预警体系能力评估[J/OL]. 兵工学报:1-10[2023-09-15]. http://kns.cnki.net/kcms/detail/11.2176.TJ.20221129.1639.002.html.
|
|
|
|
| [26] |
郭雷平, 段文博, 刘宇, 等. 基于OODA环的合成部队光电装备作战效能评估[J]. 兵工学报, 2022, 43(增刊1):177-182.
|
|
doi: 10.12382/bgxb.2022.A009 |
|
| [27] |
|
| [28] |
管清波, 于小红. 新型武器装备体系贡献度评估问题探析[J]. 装备学院学报, 2015, 26(3):1-5.
|
|
|
|
| [29] |
王保华. 主动式激光制导导引头光学系统设计[D]. 长春: 中国科学院长春光学精密机械与物理研究所, 2012.
|
|
|
|
| [30] |
齐小刚, 李博, 范英盛, 等. 多约束下多无人机的任务规划研究综述[J]. 智能系统学报, 2020, 15(2):204-217.
|
|
|
|
| [31] |
鲁飞, 鲁照权, 牛晨, 等. 基于改进蚁群算法的三维路径规划研究[J]. 传感器与微系统, 2022, 41(1):45-49.
|
|
|
|
| [32] |
于飞, 马慧, 陈斐楠, 等. 三维海底栅格地形在潜器路径规划中的应用[J]. 计算机工程与应用, 2016, 52(5):241-245.
|
|
|
| [1] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [2] | ZHANG Jixiong, LI Zonggang, NING Xiaogang, CHEN Yinjuan. Fully Distributed Consensus Control of General Linear Multi-agent System Based on Dynamic Event-trigger [J]. Acta Armamentarii, 2023, 44(S2): 223-234. |
| [3] | LIU Xingyu, GUO Ronghua, REN Chengcai, YAN Chao, CHANG Yuan, ZHOU Han, XIANG Xiaojia. Distributed Target Assignment Method for UAV Swarms Using Identity Hungarian Algorithm [J]. Acta Armamentarii, 2023, 44(9): 2824-2835. |
| [4] | GONG Yuanqiang, ZHANG Yepeng, MA Wanpeng, XUE Xiao. Mechanisms of Group Intelligence Emergence in UAV Swarms [J]. Acta Armamentarii, 2023, 44(9): 2661-2671. |
| [5] | LI Chao, WANG Ruixing, HUANG Jianzhong, JIANG Feilong, WEI Xuemei, SUN Yanxin. Autonomous Decision-making and Intelligent Collaboration of UAV Swarms Based on Reinforcement Learning with Sparse Rewards [J]. Acta Armamentarii, 2023, 44(6): 1537-1546. |
| [6] | YU Di, WANG Yajie, ZHAO Bo, LIU Qiong. Fixed-Time Tracking Control of Multi-agent Systems under Dynamic Event-Triggering Mechanism [J]. Acta Armamentarii, 2023, 44(5): 1403-1413. |
| [7] | LI Xiaonan, LI Tianpeng, ZHANG Kaichuang, CHEN Hao, GUO Aiqiang, GAO Xinbao. Structural Design and Shielding Performance of Multi-spectral Interfering Smoke Module [J]. Acta Armamentarii, 2023, 44(3): 910-918. |
| [8] | LI Jiajian, SHI Yanjun, YANG Yu, LI Bo, ZHAO Xijun. Multi-agent Reinforcement Learning-based Offloading Decision for UAV Cluster Combat Tasks [J]. Acta Armamentarii, 2023, 44(11): 3295-3309. |
| [9] | DING Wei, MING Zhenjun, WANG Guoxin, YAN Yan. Dynamic Prediction Model Based on Multi-level LSTM Network for Multi-agent Attack and Defense Effectiveness [J]. Acta Armamentarii, 2023, 44(1): 176-192. |
| [10] | KONG Guojie, FENG Shi, YU Huilong, JU Zhiyang, GONG Jianwei. A Review on Cooperative Motion Planning of Unmanned Vehicles [J]. Acta Armamentarii, 2023, 44(1): 11-26. |
| [11] | WEI Ning, WANG Guan. Application of Reinforcement Learning in Decision-Making Management of Intelligent Unmanned System [J]. Acta Armamentarii, 2022, 43(S2): 164-169. |
| [12] | LI Li, LI Xuguang, GUO Kaijie, SHI Chao, CHEN Zhaowen. Simulation of Ground-air Cooperative Combat Based on Reinforcement Learning in Localization Environment [J]. Acta Armamentarii, 2022, 43(S1): 74-81. |
| [13] | MA Ye, FAN Wenhui, CHANG Tianqing. Optimization Method of Unmanned Swarm Defensive Combat Scheme Based on Intelligent Algorithm [J]. Acta Armamentarii, 2022, 43(6): 1415-1425. |
| [14] | YUAN Jianwen, QI Xuan, DONG Cheng, YI Zhenxin, ZHANG Lin, ZHU Shunguan. Characteristics of 5-aminotrazole/sodium Periodate Low-temperature Gas-generating Agents [J]. Acta Armamentarii, 2022, 43(4): 788-795. |
| [15] | ZHANG Chaosheng, WANG Jian, ZHANG Lin, WANG Ya. A Multi-agent System Flocking Model with Obstacle Avoidance in Complex Obstacle Field [J]. Acta Armamentarii, 2021, 42(1): 141-150. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||