
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (4): 240058-.doi: 10.12382/bgxb.2024.0058
何洋*( ), 李刚
), 李刚
收稿日期:2024-01-18
上线日期:2025-04-30
通讯作者:
基金资助:
HE Yang*(), LI Gang
Received:2024-01-18
Online:2025-04-30
摘要:
为提高智能汽车的避障能力,提出一种基于速度障碍模型的智能汽车轨迹规划控制方法。结合速度障碍法和障碍物膨胀法,建立智能汽车的速度障碍模型,将动态障碍物在速度空间中的运动不确定转化为位置不确定,实现安全裕度根据障碍物尺寸和相对速度自适应调整。为兼顾轨迹跟踪精度和行驶稳定性,根据汽车状态方程、模糊控制原理和模型预测控制原理设计智能汽车模糊模型预测控制器(Fuzzy Model Predictive Control,FMPC)。为验证该方法的有效性,采用仿真软件建立其仿真模型。仿真结果表明:对多个随机的静、动态障碍物均可实现避障,且在避障后快速平稳地跟踪参考轨迹。通过避障稳定性分析得出,目标车速为100km/h,其最大横向速度为4.01km/h,最大横摆角速度为20.8°/s,最大质心侧偏角为2.32°,满足汽车行驶稳定性要求,该方法有效提高了智能汽车的避障能力及其行驶稳定性。
中图分类号:
何洋, 李刚. 基于速度障碍模型的智能汽车轨迹规划控制方法研究[J]. 兵工学报, 2025, 46(4): 240058-.
HE Yang, LI Gang. Research on Trajectory Planning Control Method of Intelligent Vehicle Based on Velocity Obstacle Model[J]. Acta Armamentarii, 2025, 46(4): 240058-.
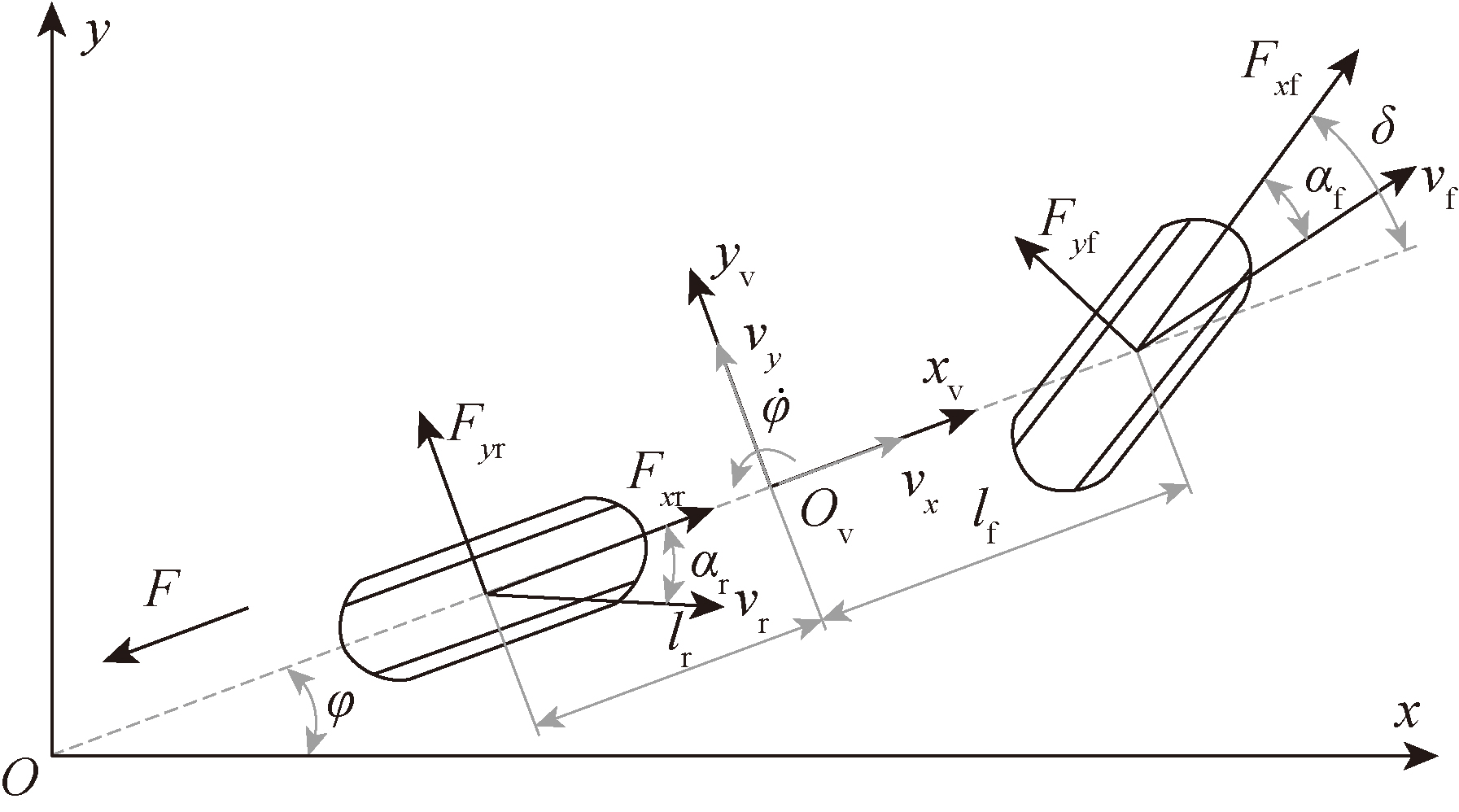
图1 汽车横摆动力学模型
Fig.1 Vehicle yaw dynamic model
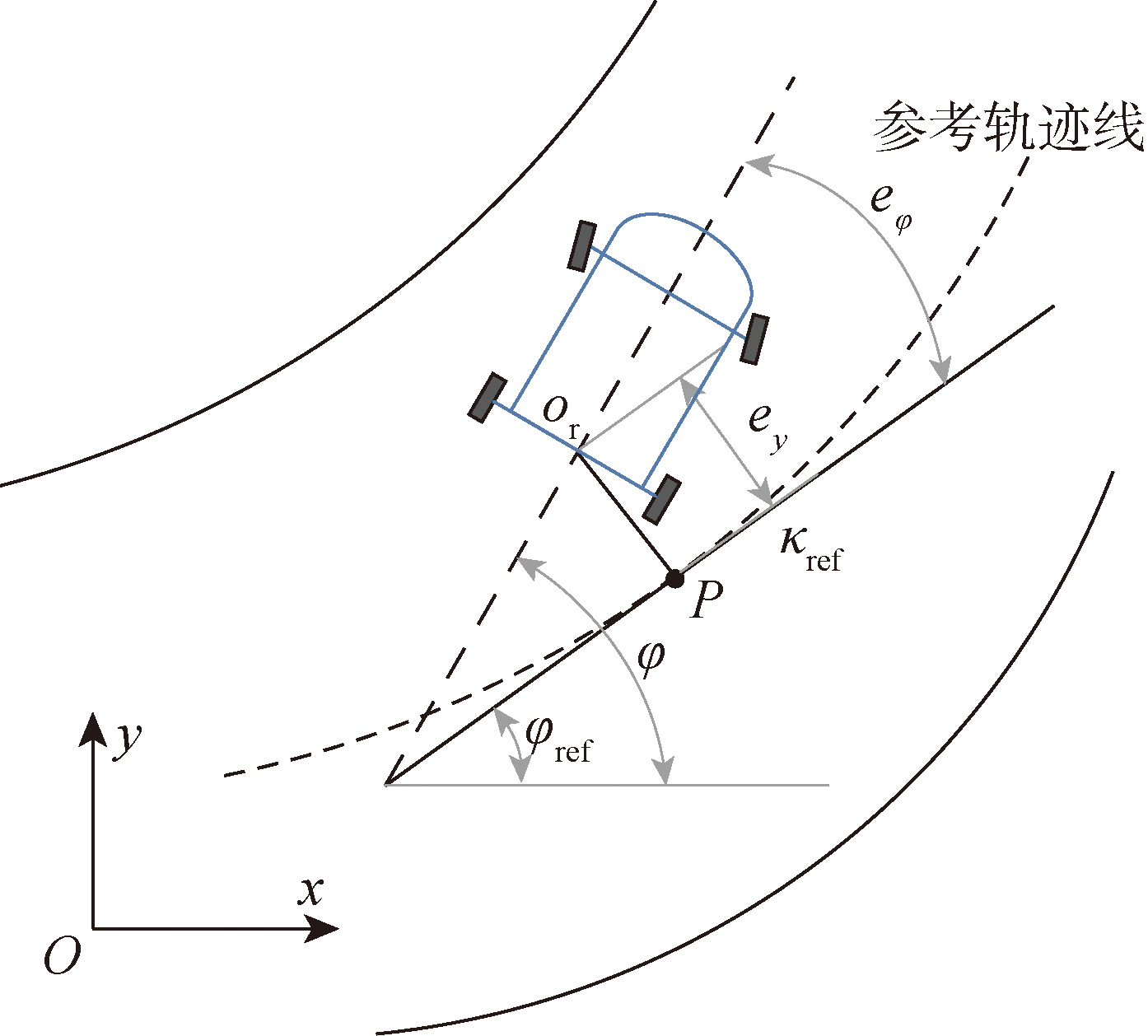
图2 轨迹跟踪误差模型
Fig.2 Trajectory tracking error model
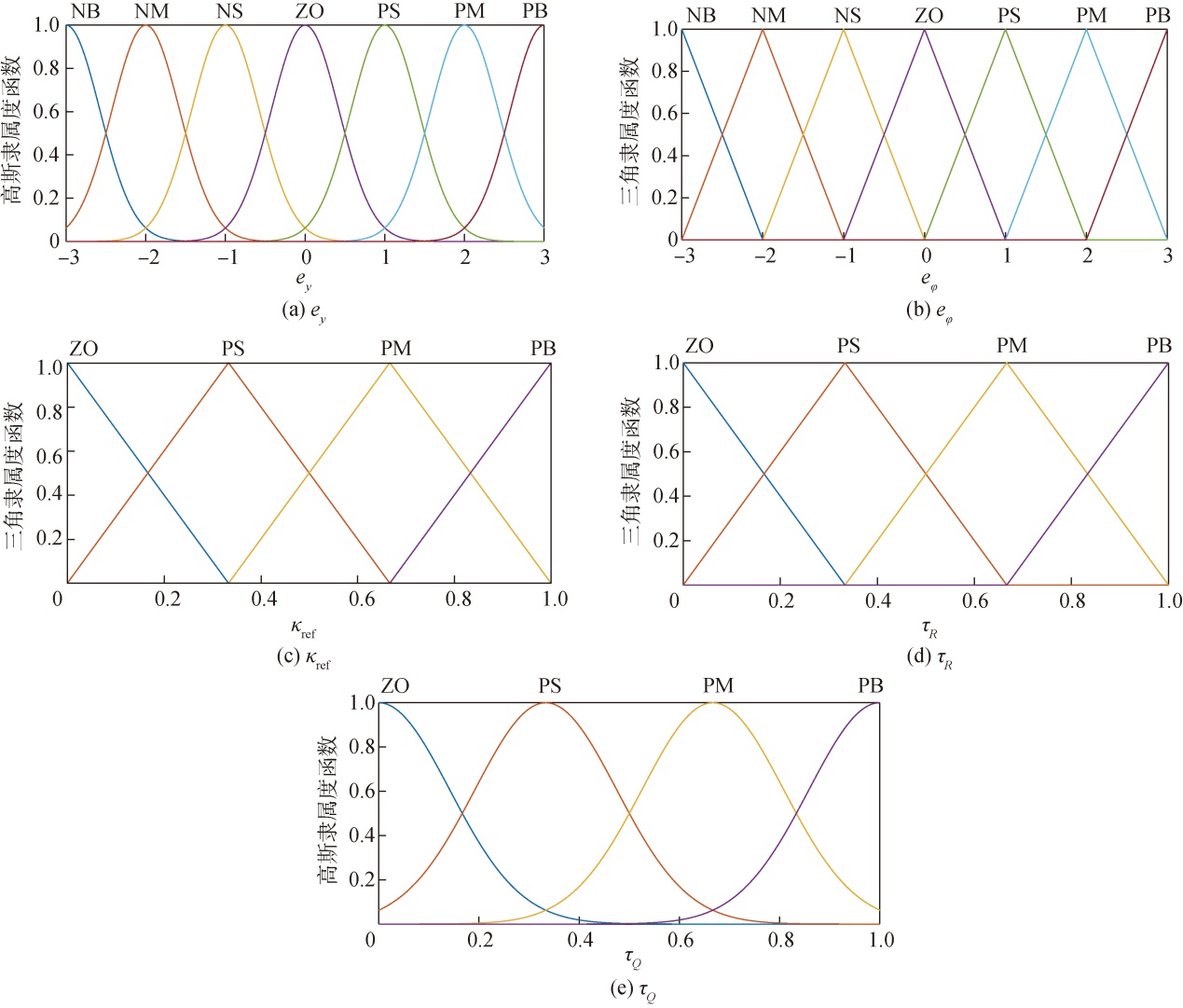
图3 输入、输出隶属函数
Fig.3 Membership functions of input and output
| eφ | ey | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PM | PM | PS | PM | PM | PB |
| NM | PM | PM | PS | PS | PS | PM | PM |
| NS | PM | PS | PS | ZO | PS | PS | PM |
| ZO | PB | PS | PS | ZO | PS | PS | PB |
| PS | PM | PS | PS | ZO | PS | PS | PM |
| PM | PM | PM | PS | PS | PS | PM | PM |
| PB | PB | PM | PS | PS | PS | PM | PB |
表1 τQ模糊规则
Table 1 Fuzzy rules of τQ
| eφ | ey | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| NB | PB | PM | PM | PS | PM | PM | PB |
| NM | PM | PM | PS | PS | PS | PM | PM |
| NS | PM | PS | PS | ZO | PS | PS | PM |
| ZO | PB | PS | PS | ZO | PS | PS | PB |
| PS | PM | PS | PS | ZO | PS | PS | PM |
| PM | PM | PM | PS | PS | PS | PM | PM |
| PB | PB | PM | PS | PS | PS | PM | PB |
| κref | ey | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| ZO | PB | PM | PS | ZO | PS | PM | PB |
| PS | PM | PS | PS | ZO | PS | PS | PM |
| PM | PM | PS | PS | PM | PS | PS | PM |
| PB | PB | PM | PM | PB | PM | PM | PB |
表2 τR模糊规则
Table 2 Fuzzy rules of τR
| κref | ey | ||||||
|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | |
| ZO | PB | PM | PS | ZO | PS | PM | PB |
| PS | PM | PS | PS | ZO | PS | PS | PM |
| PM | PM | PS | PS | PM | PS | PS | PM |
| PB | PB | PM | PM | PB | PM | PM | PB |

图4 响应曲面
Fig.4 Response surface
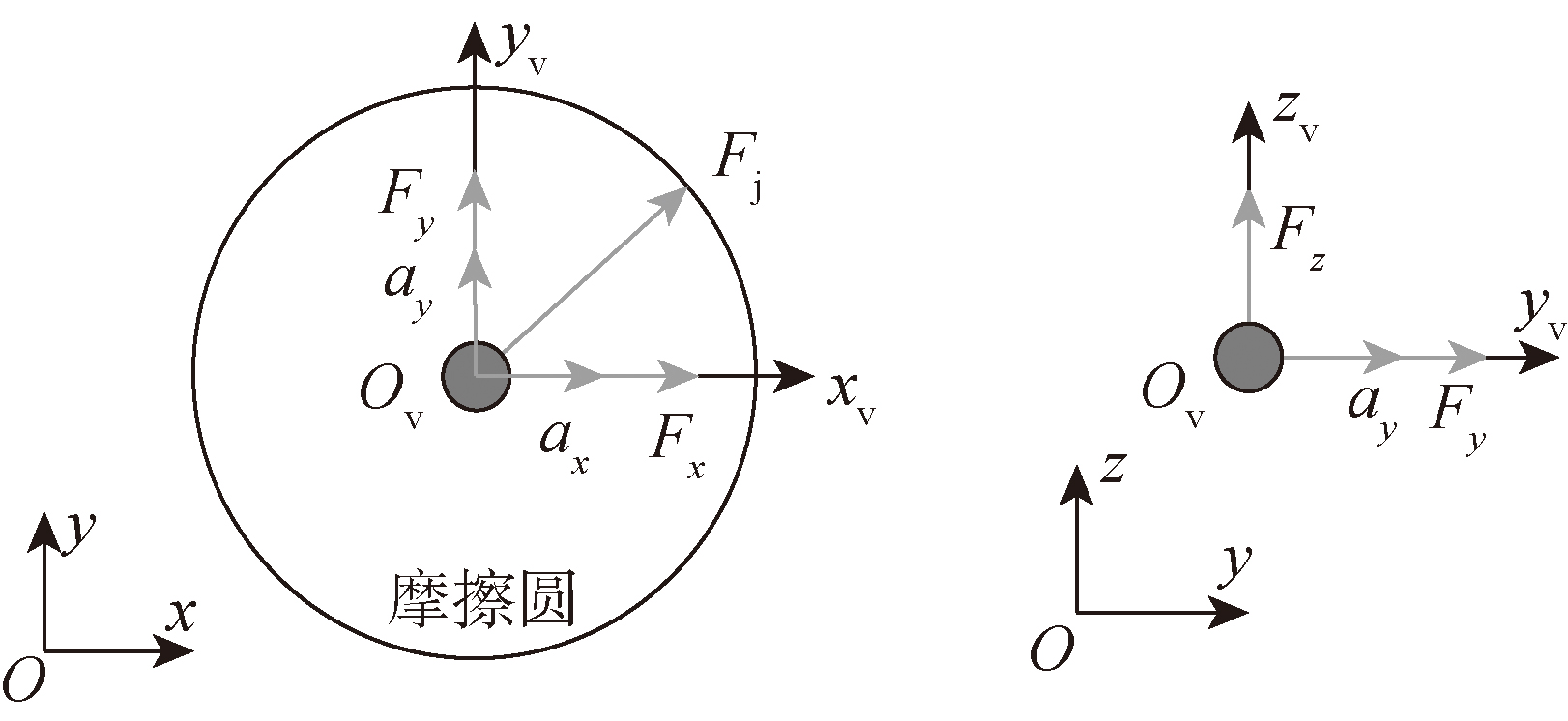
图5 汽车点质量模型
Fig.5 Vehicle point mass model
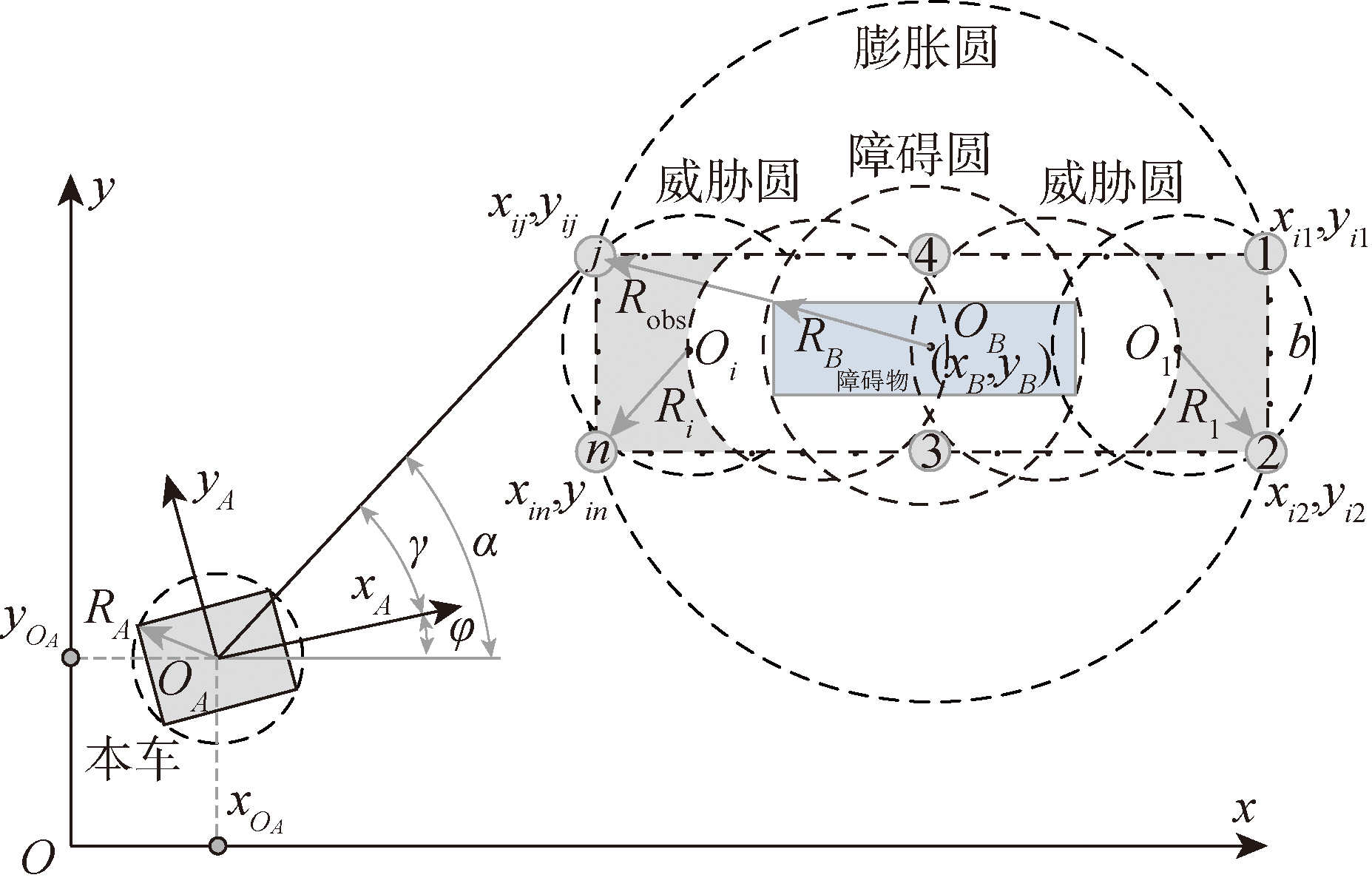
图6 障碍物膨胀模型图
Fig.6 Obstacle expansive model
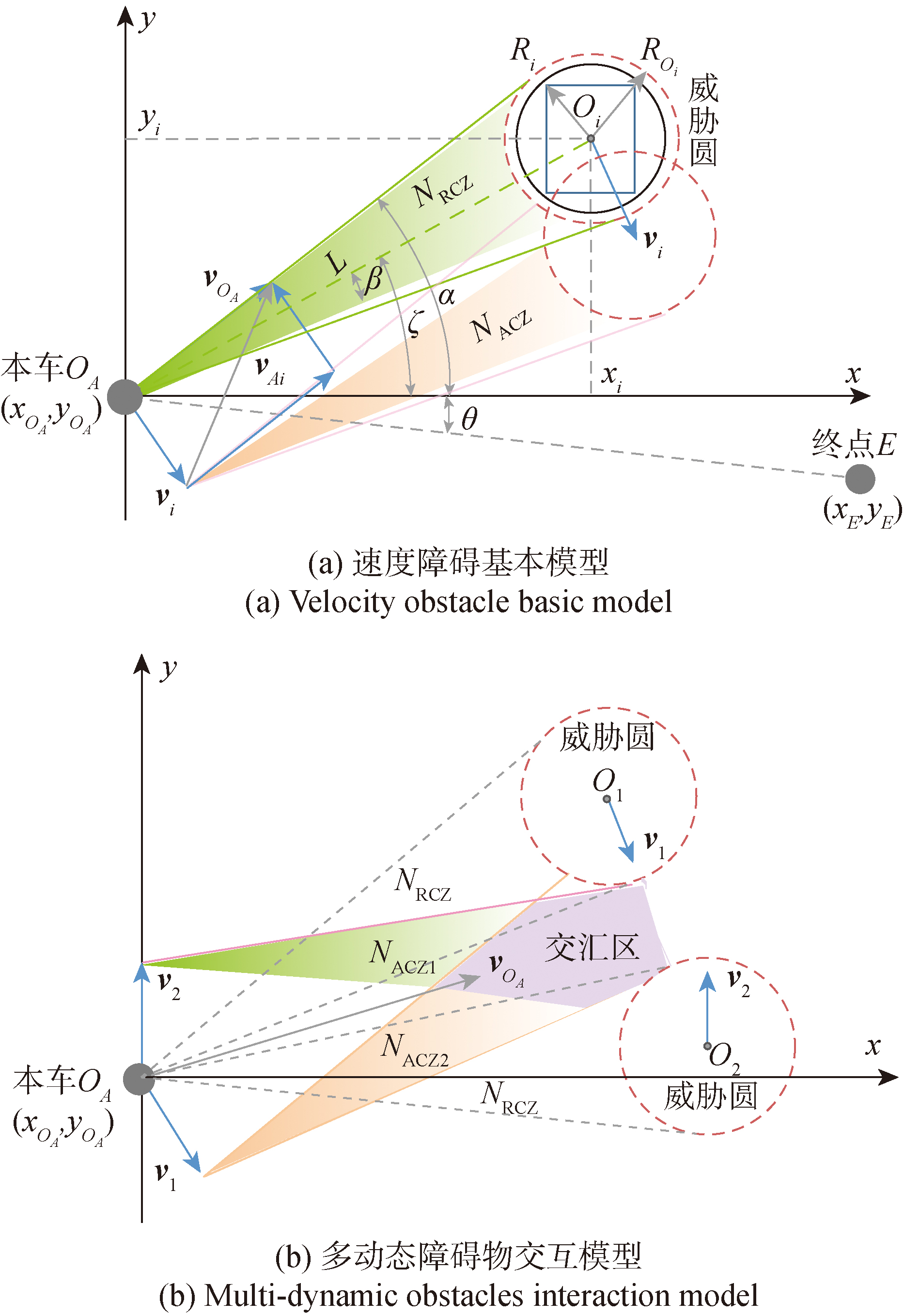
图7 智能汽车速度障碍模型
Fig.7 Velocity obstacle model of intelligent vehicle
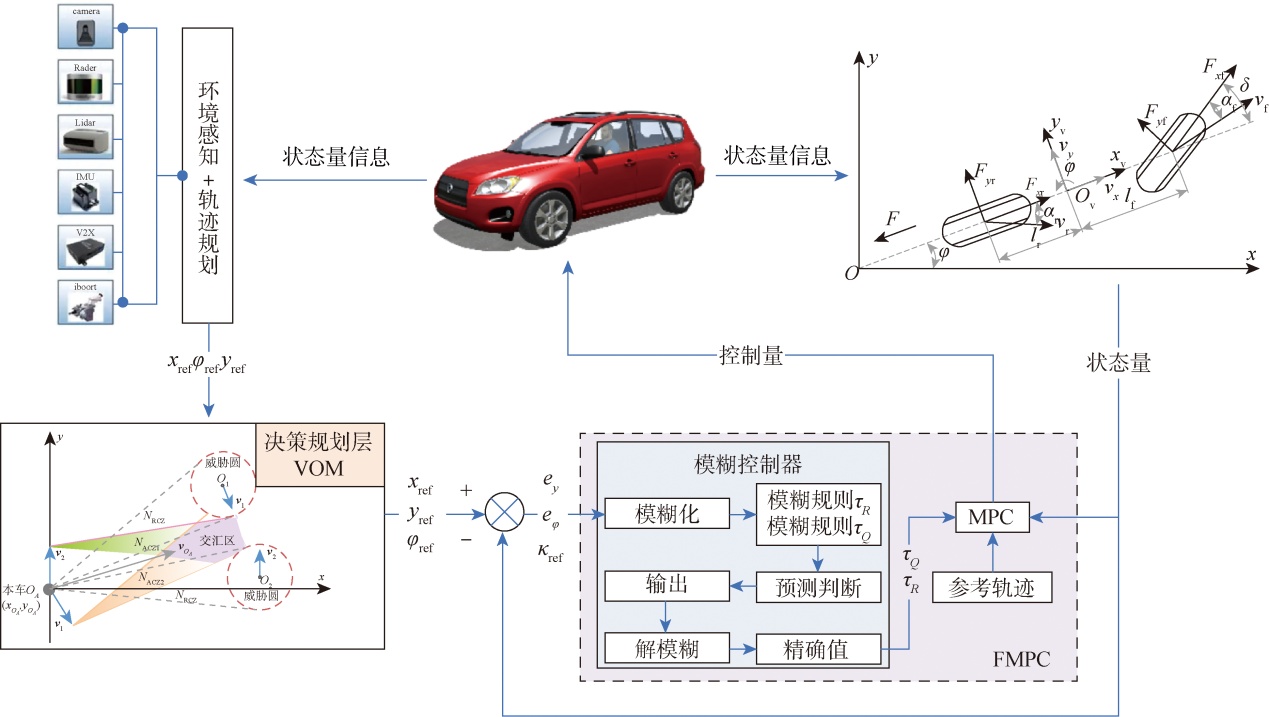
图8 基于VOM的智能汽车轨迹规划控制逻辑架构
Fig.8 Logic framework of trajectory planning of intelligent vehicle based on VOM
| 参数 | 数值 |
|---|---|
| 长×宽×高/m | 4.63×1.82×1.71 |
| 簧载质量m/kg | 1430 |
| 转动惯量Ix/(kg·m2) | 717.7 |
| 转动惯量Iy/(kg·m2) | 2059.2 |
| 转动惯量Iz/(kg·m2) | 2059.2 |
| 轴距l/m | 2.68 |
| 前轮距Tf/m | 1.63 |
| 后轮距Tr/m | 1.64 |
| 质心高度h/m | 0.61 |
| 轮胎纵向刚度Csf、Csr/(N·m-1) | 8×105 |
| 前轮侧偏刚度 /(N·rad-1) | 7×104 |
| 后轮侧偏刚度 /(N·rad-1) | 6.5×104 |
| 轮胎规格 | 235/55 R18 |
表3 汽车相关参数
Table 3 Related parameters of SUV
| 参数 | 数值 |
|---|---|
| 长×宽×高/m | 4.63×1.82×1.71 |
| 簧载质量m/kg | 1430 |
| 转动惯量Ix/(kg·m2) | 717.7 |
| 转动惯量Iy/(kg·m2) | 2059.2 |
| 转动惯量Iz/(kg·m2) | 2059.2 |
| 轴距l/m | 2.68 |
| 前轮距Tf/m | 1.63 |
| 后轮距Tr/m | 1.64 |
| 质心高度h/m | 0.61 |
| 轮胎纵向刚度Csf、Csr/(N·m-1) | 8×105 |
| 前轮侧偏刚度 /(N·rad-1) | 7×104 |
| 后轮侧偏刚度 /(N·rad-1) | 6.5×104 |
| 轮胎规格 | 235/55 R18 |
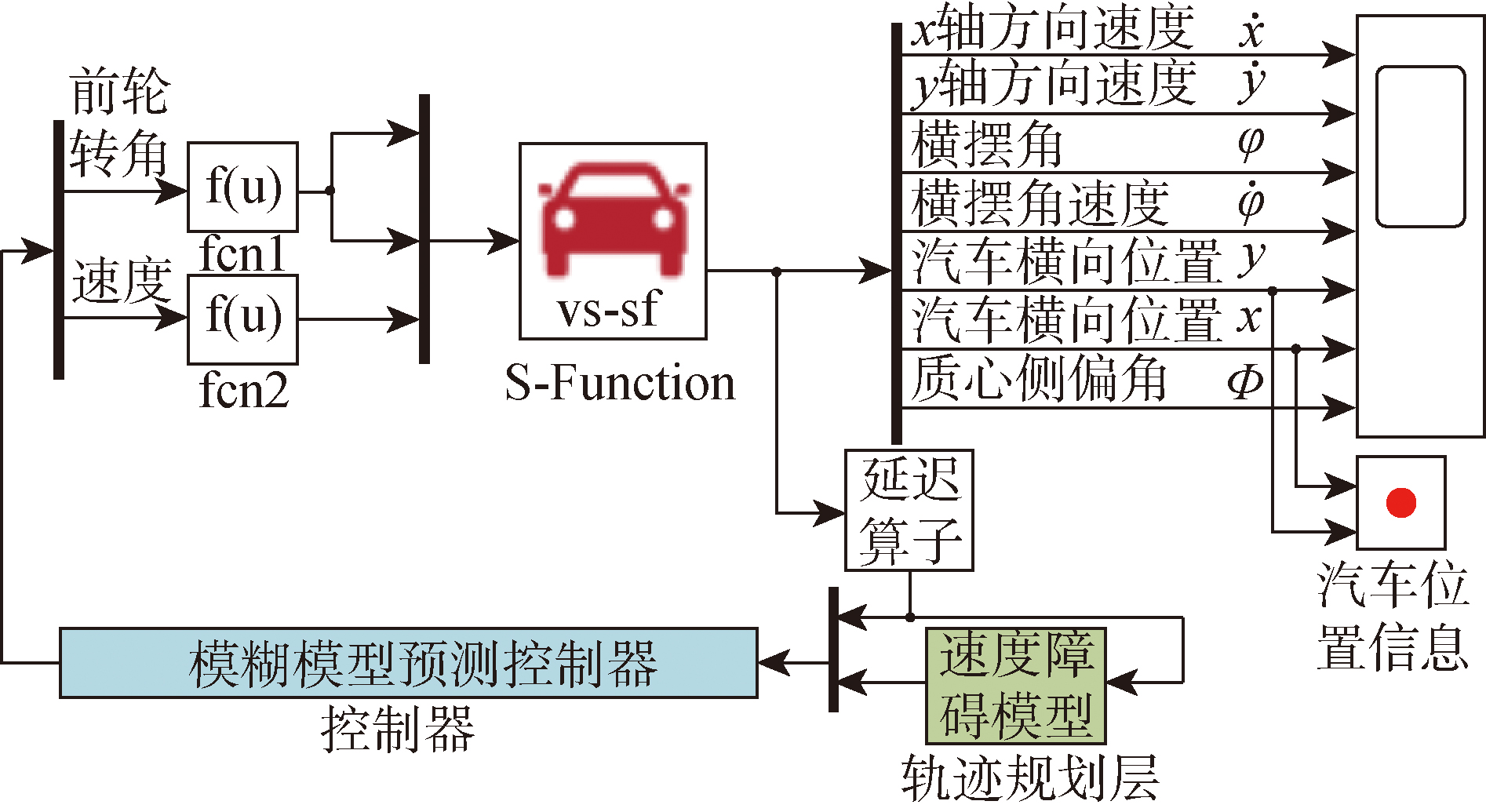
图9 仿真模型
Fig.9 Simulation model

图10 转向角响应特性
Fig.10 Response characteristics of steering angle
| 参数 | 车速/(km·h-1) | MPC | FMPC | FMPC优化量/% |
|---|---|---|---|---|
| 超调量/% | 60 | 12.2 | 7.9 | 4.3 |
| 100 | 27.1 | 14.7 | 12.4 | |
| 上升时间/s | 60 | 0.43 | 0.35 | 18.6 |
| 100 | 0.44 | 0.37 | 15.9 | |
| 峰值时间/s | 60 | 0.93 | 0.71 | 23.6 |
| 100 | 0.95 | 0.81 | 14.7 | |
| 过度时间/s | 60 | 1.92 | 0.98 | 48.9 |
| 100 | 2.27 | 1.21 | 46.7 |
表4 统计值
Table 4 Statistical values
| 参数 | 车速/(km·h-1) | MPC | FMPC | FMPC优化量/% |
|---|---|---|---|---|
| 超调量/% | 60 | 12.2 | 7.9 | 4.3 |
| 100 | 27.1 | 14.7 | 12.4 | |
| 上升时间/s | 60 | 0.43 | 0.35 | 18.6 |
| 100 | 0.44 | 0.37 | 15.9 | |
| 峰值时间/s | 60 | 0.93 | 0.71 | 23.6 |
| 100 | 0.95 | 0.81 | 14.7 | |
| 过度时间/s | 60 | 1.92 | 0.98 | 48.9 |
| 100 | 2.27 | 1.21 | 46.7 |
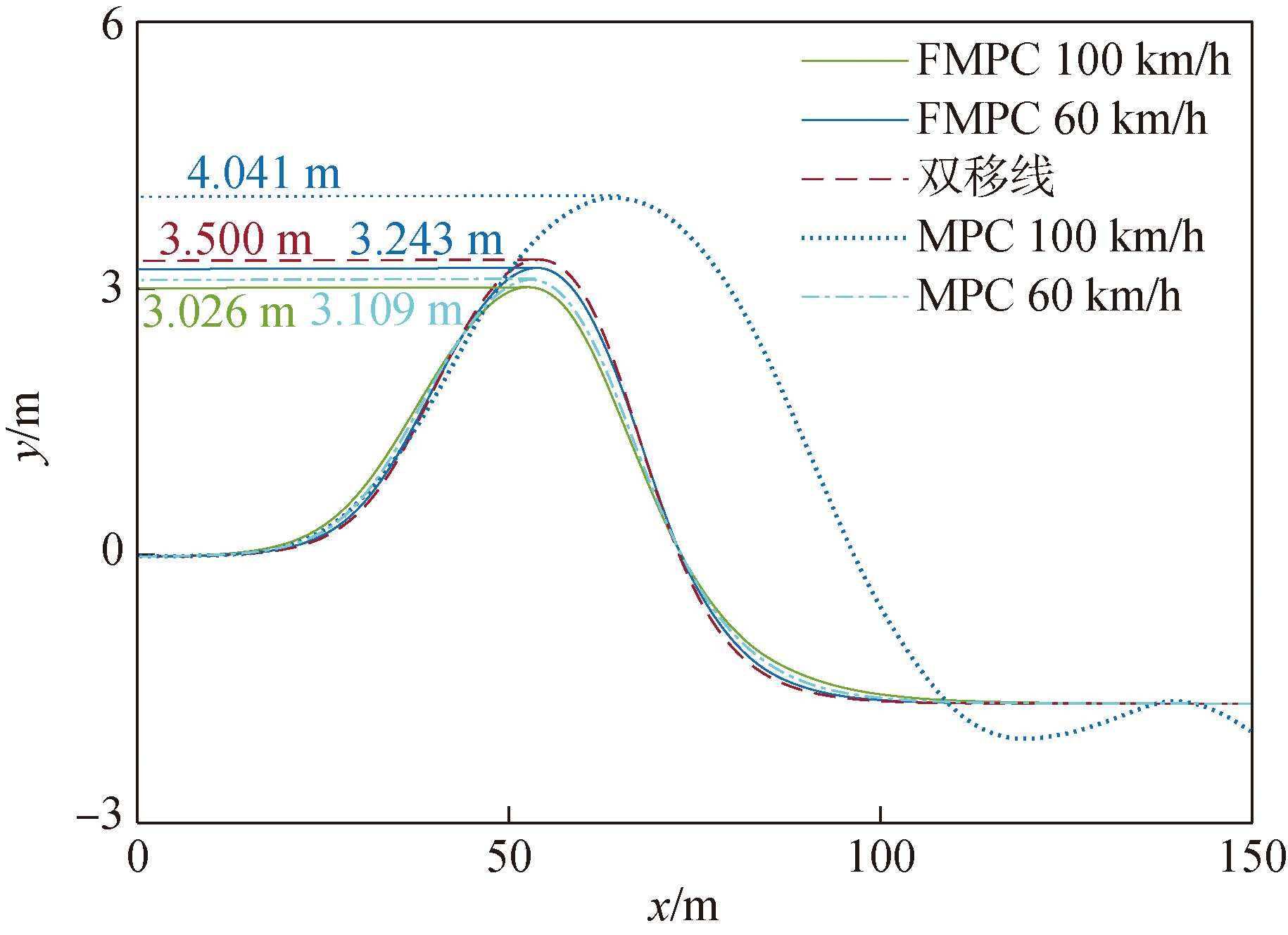
图11 双移线轨迹跟踪
Fig.11 Double lane change trajectory tracking
| 车速/(km·h-1) | MPC | FMPC | FMPC优化量/% |
|---|---|---|---|
| 60 | 0.23 | 0.10 | 56.5 |
| 100 | 0.69 | 0.31 | 55.1 |
表5 轨迹跟踪误差
Table 5 Trajectory tracking error m
| 车速/(km·h-1) | MPC | FMPC | FMPC优化量/% |
|---|---|---|---|
| 60 | 0.23 | 0.10 | 56.5 |
| 100 | 0.69 | 0.31 | 55.1 |
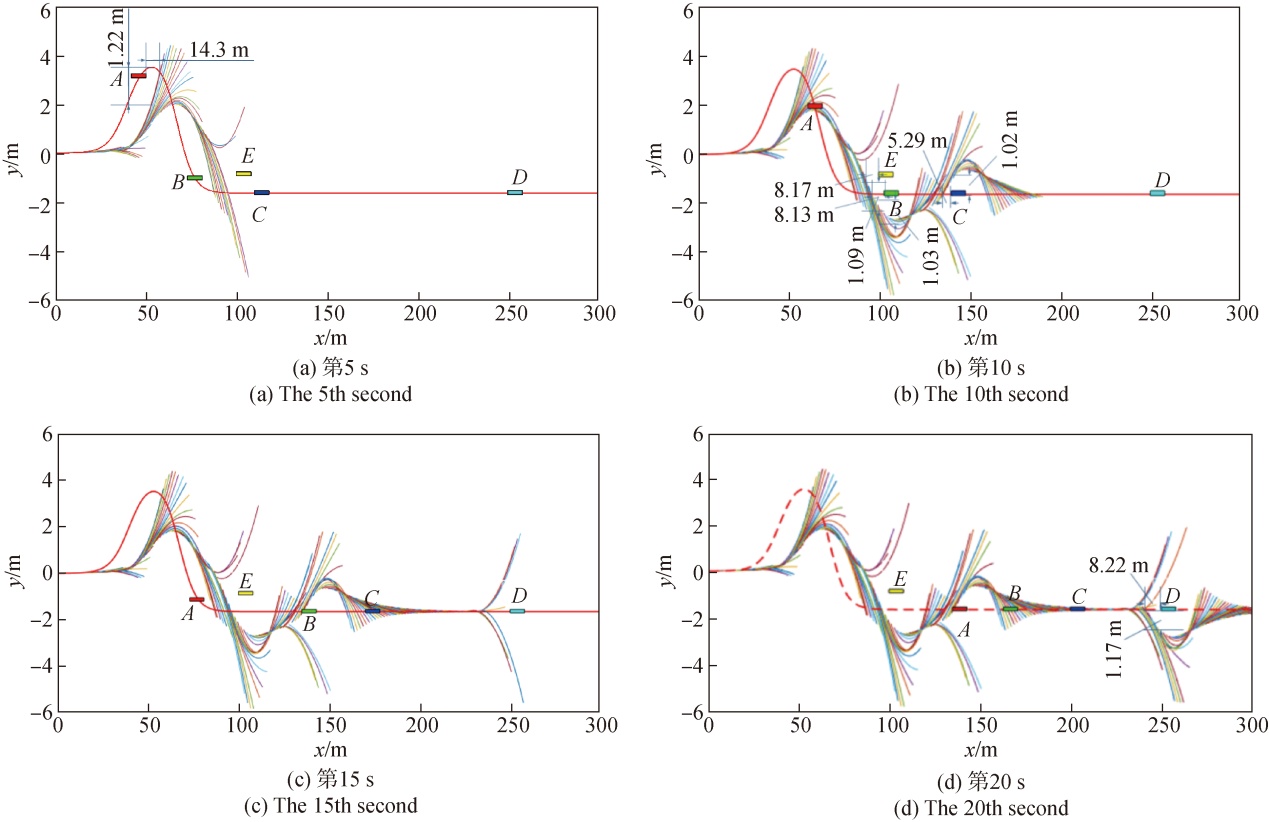
图12 车速60km/h时动、静态障碍物避障
Fig.12 Dynamic and static obstacles avoidance at 60km/h
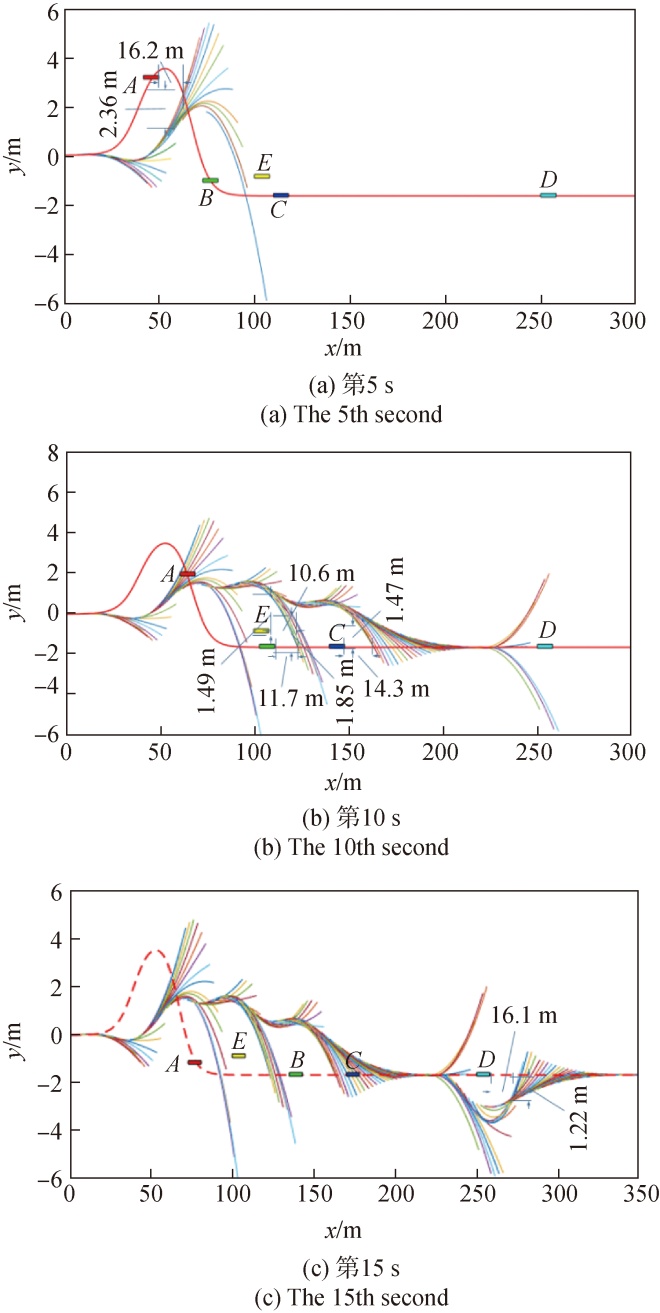
图13 车速100km/h时动、静态障碍物避障
Fig.13 Dynamic and static obstacles avoidance at 100km/h
| 障碍物 | 方向 | 车速/(km·h-1) | |
|---|---|---|---|
| 60 | 100 | ||
| A | 纵向 | 14.3 | 16.2 |
| 横向 | 1.22 | 2.36 | |
| B | 纵向 | 8.13 | 11.7 |
| 横向 | 1.03 | 1.85 | |
| C | 纵向 | 5.29 | 14.3 |
| 横向 | 1.02 | 1.47 | |
| D | 纵向 | 8.22 | 16.1 |
| 横向 | 1.17 | 1.22 | |
| E | 纵向 | 8.17 | 10.6 |
| 横向 | 1.09 | 1.49 | |
表6 安全裕度
Table 6 Safety margin
| 障碍物 | 方向 | 车速/(km·h-1) | |
|---|---|---|---|
| 60 | 100 | ||
| A | 纵向 | 14.3 | 16.2 |
| 横向 | 1.22 | 2.36 | |
| B | 纵向 | 8.13 | 11.7 |
| 横向 | 1.03 | 1.85 | |
| C | 纵向 | 5.29 | 14.3 |
| 横向 | 1.02 | 1.47 | |
| D | 纵向 | 8.22 | 16.1 |
| 横向 | 1.17 | 1.22 | |
| E | 纵向 | 8.17 | 10.6 |
| 横向 | 1.09 | 1.49 | |

图14 速度跟踪曲线
Fig.14 Speed tracking curve
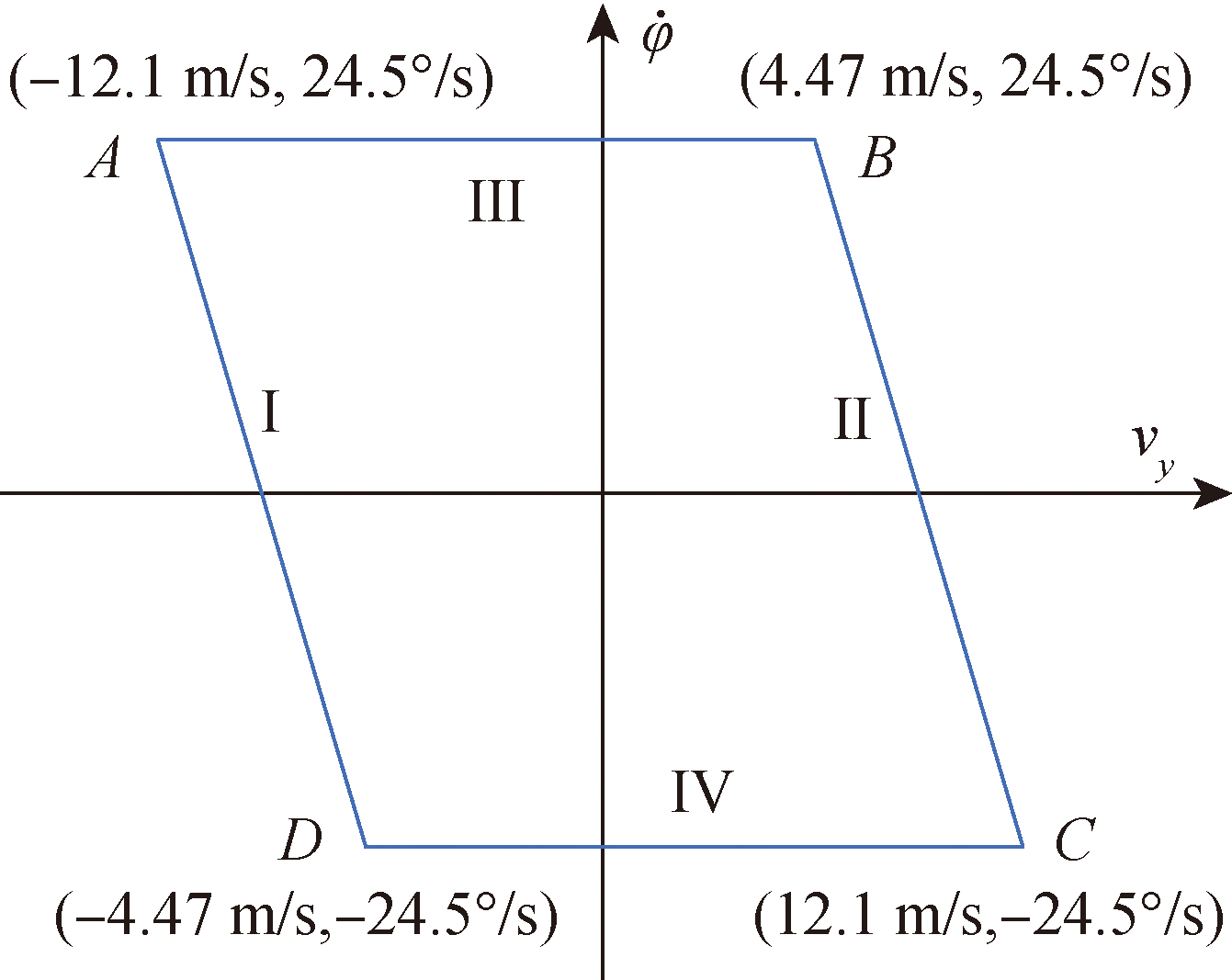
图15 汽车横摆包络线区域示意图
Fig.15 Schematic diagram of vehicle yaw envelope region
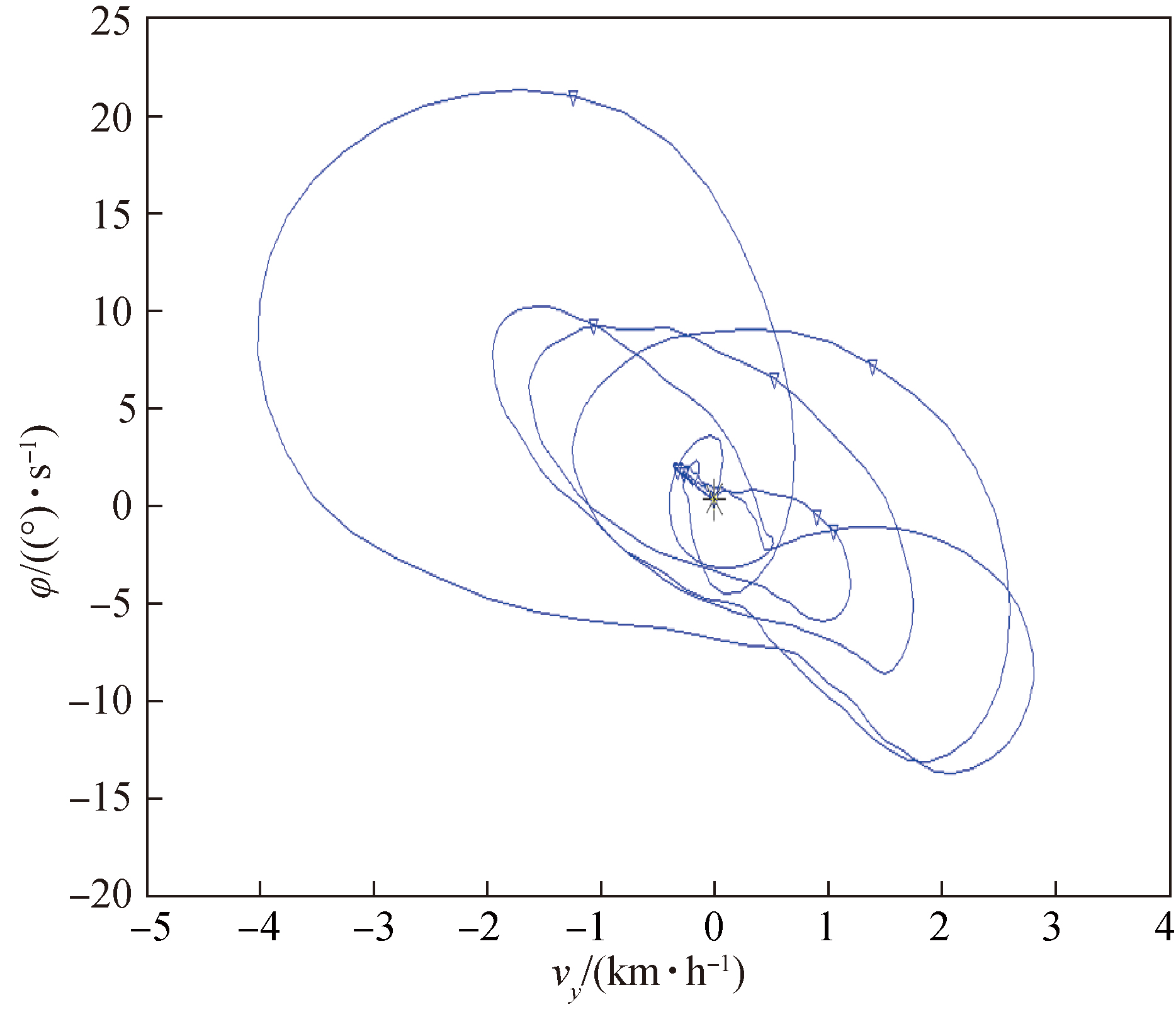
图16 横向速度与横摆角速度变化关系
Fig.16 Relation between lateral velocity and yaw rate
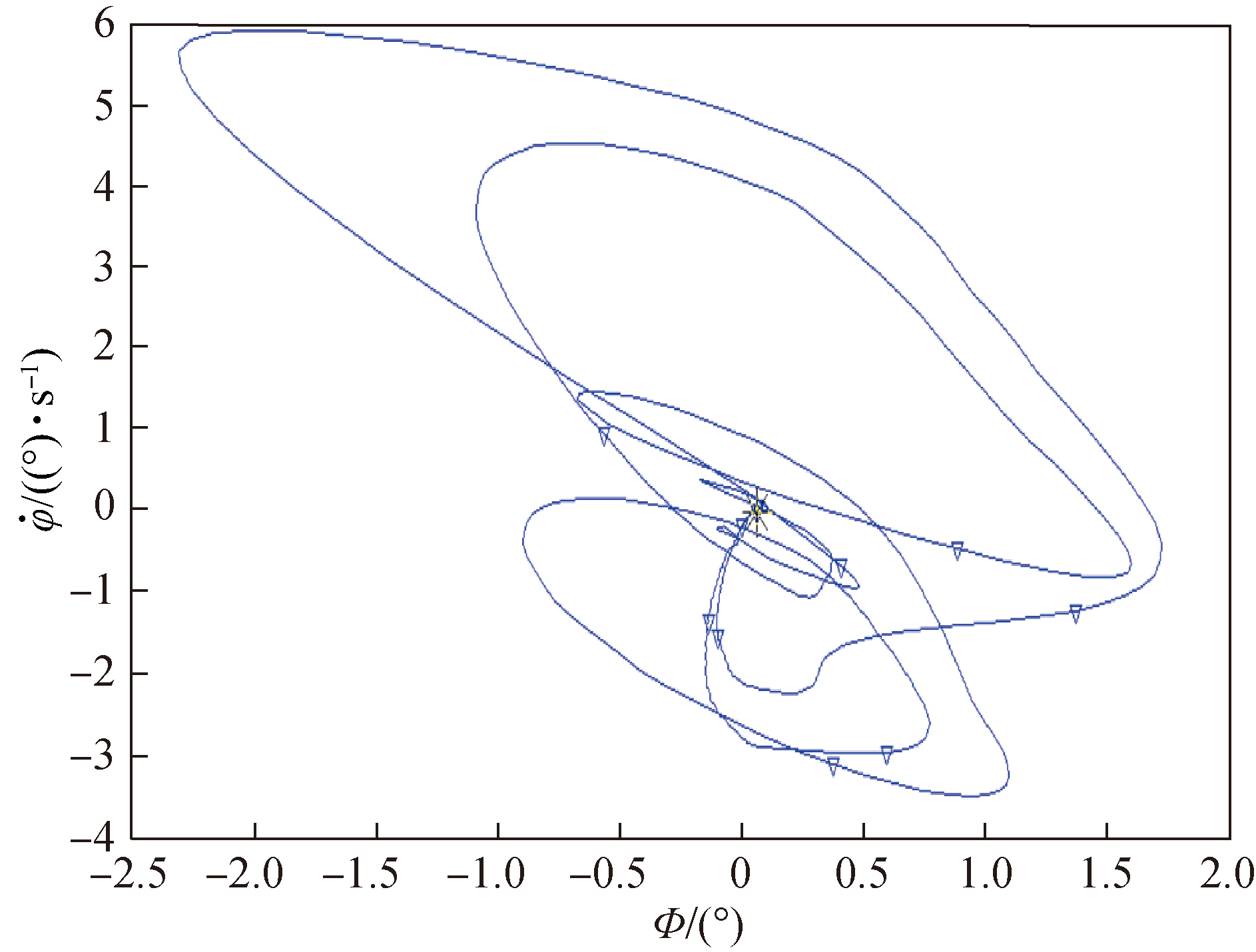
图17 质心侧偏角与横摆角速度变化关系
Fig.17 Relation between centroid side slip angle and yaw rate
| [1] |
龚建伟, 龚乘, 林云龙, 等. 智能车辆规划与控制策略学习方法综述[J]. 北京理工大学学报, 2022, 42(7):665-674.
|
|
|
|
| [2] |
|
| [3] |
李新凯, 虎晓诚, 马萍, 等. 基于改进DDPG的无人驾驶避障跟踪控制[J]. 华南理工大学学报(自然科学版), 2023, 51(11):44-55.
doi: 10.12141/j.issn.1000-565X.220747 |
|
doi: 10.12141/j.issn.1000-565X.220747 |
|
| [4] |
|
| [5] |
王国栋, 刘立, 孟宇, 等. 一体式车辆避撞轨迹规划与跟踪控制[J]. 交通运输系统工程与信息, 2022, 22(2):127-136.
|
|
|
|
| [6] |
李耀华, 范吉康, 刘洋, 等. 自适应双时域参数MPC的智能车辆路径规划与跟踪控制[J]. 汽车安全与节能学报, 2021, 12(4):528-539.
|
|
|
|
| [7] |
|
| [8] |
李军, 周伟, 唐爽. 基于自适应拟合的智能车换道避障轨迹规划[J]. 汽车工程, 2023, 45(7):1174-1183.
|
|
|
|
| [9] |
方秋雨, 张蕴霖, 麻壮壮, 等. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(增刊2):90-100.
|
|
doi: 10.12382/bgxb.2023.0882 |
|
| [10] |
王明强, 王震坡, 张雷. 基于碰撞风险评估的智能汽车局部路径规划方法研究[J]. 机械工程学报, 2021, 57(10):28-40.
doi: 10.3901/JME.2021.10.028 |
|
doi: 10.3901/JME.2021.10.028 |
|
| [11] |
|
| [12] |
|
| [13] |
张利鹏, 苏泰, 严勇. 基于采样区域优化的智能车辆轨迹规划方法[J]. 机械工程学报, 2022, 58(14):276-287.
doi: 10.3901/JME.2022.14.276 |
|
doi: 10.3901/JME.2022.14.276 |
|
| [14] |
杨彬, 宋学伟, 高振海. 考虑车辆运动约束的最优避障轨迹规划算法[J]. 汽车工程, 2021, 43(4):562-570.
|
|
|
|
| [15] |
肖宏宇, 付志强, 陈慧勇. 面向低速自动驾驶车辆的避障规划研究[J]. 同济大学学报(自然科学版), 2019, 47(增刊1):164-170.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
陈虹, 申忱, 郭洪艳, 等. 面向动态避障的智能汽车滚动时域路径规划[J]. 中国公路学报, 2019, 32(1):162-172.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
裴红蕾. 智能汽车换道避障路径规划与跟踪方法[J]. 中国安全科学学报, 2018, 28(9):26-32.
doi: 10.16265/j.cnki.issn1003-3033.2018.09.005 |
|
doi: 10.16265/j.cnki.issn1003-3033.2018.09.005 |
|
| [26] |
|
| [27] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3):585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [28] |
王嘉文, 孙晨晨, 赵靖, 等. 交通事件下路段通行能力多层模糊估计方法[J]. 交通运输系统工程与信息, 2023, 23(6):100-110.
|
|
|
|
| [29] |
|
| [30] |
|
| [31] |
刘凯, 龚建伟, 陈舒平, 等. 高速无人驾驶车辆最优运动规划与控制的动力学建模分析[J]. 机械工程学报, 2018, 54(14):141-151.
doi: 10.3901/JME.2018.14.141 |
|
doi: 10.3901/JME.2018.14.141 |
| [1] | 徐扬, 魏超, 冯付勇, 胡乐云. 基于时空解耦规划方法的无人机自主降落策略[J]. 兵工学报, 2025, 46(7): 240653-. |
| [2] | 野汶博, 方洋旺, 洪瑞阳, 胡祁东. 基于控制障碍函数的欠驱动无人水下航行器椭圆障碍物避障制导[J]. 兵工学报, 2025, 46(5): 240404-. |
| [3] | 秦伯羽, 张栋, 唐硕. 飞行器集群安全控制关键问题与技术探讨[J]. 兵工学报, 2025, 46(4): 240215-. |
| [4] | 潘云伟, 李敏, 曾祥光, 黄傲, 张加衡, 任文哲, 彭倍. 基于人工势场和改进强化学习的自主式水下潜航器避障和航迹规划[J]. 兵工学报, 2025, 46(4): 240300-. |
| [5] | 南汶江, 闫循良, 杨宇轩, 王培臣. 考虑时间约束的纵侧向综合调控再入滑翔轨迹快速规划[J]. 兵工学报, 2025, 46(3): 240154-. |
| [6] | 李雅轩, 刘新福. 基于精确凸松弛的固定翼无人机实时轨迹规划[J]. 兵工学报, 2025, 46(3): 240362-. |
| [7] | 李诗颖, 丁应和, 孙海文, 许正, 李烨, 唐恩博. 规模化无人集群共识模型与协同控制方法[J]. 兵工学报, 2024, 45(S2): 113-122. |
| [8] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [9] | 胡砚洋, 何凡, 白成超. 高超声速飞行器末制导段协同避障决策方法[J]. 兵工学报, 2024, 45(9): 3147-3160. |
| [10] | 王培臣, 闫循良, 南汶江, 李新国. 考虑时间约束的近解析滑翔轨迹快速规划方法[J]. 兵工学报, 2024, 45(7): 2294-2305. |
| [11] | 梅泽伟, 李天任, 朱佳琳, 邵星灵, 丁天雲, 刘俊. 基于DQN变动力智能决策的轨迹规划[J]. 兵工学报, 2024, 45(12): 4395-4406. |
| [12] | 丁天雲, 夏逸, 梅泽伟, 邵星灵, 刘俊. 基于DDPG的变外形航天飞行器碰撞规避的轨迹规划方法[J]. 兵工学报, 2024, 45(11): 3903-3914. |
| [13] | 裴新月, 于勇, 李政, 李佳讯, 于剑桥. 基于神经网络优化直/气复合控制导弹迅捷转弯[J]. 兵工学报, 2024, 45(10): 3564-3576. |
| [14] | 贾一飞, 蒋朝阳. 动态可重构自适应无人车辆编队系统[J]. 兵工学报, 2024, 45(10): 3654-3673. |
| [15] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4