
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (11): 3903-3914.doi: 10.12382/bgxb.2023.1182
丁天雲1,2, 夏逸1,2, 梅泽伟1,2, 邵星灵2,3,*( ), 刘俊1,2
), 刘俊1,2
收稿日期:2023-12-11
上线日期:2024-04-22
通讯作者:
基金资助:
DING Tianyun1,2, XIA Yi1,2, MEI Zewei1,2, SHAO Xingling2,3,*(), LIU Jun1,2
Received:2023-12-11
Online:2024-04-22
摘要:
针对变外形航天飞行器制导与变形决策强耦合问题,提出了基于深度确定性策略梯度(Deep Deterministic Policy Gradient, DDPG)变外形碰撞规避的轨迹规划方法。依托变形参量建立变外形航天飞行器运动学模型,设计具有射程误差校正功能的纵向制导律和基于视线角偏差的横向制导律,实现绕飞障碍物并保证制导精度。建立适用于连续变外形的马尔可夫决策模型,以攻角、马赫数以及飞行器与障碍物的相对距离为状态空间,设计考虑碰撞的势场惩罚函数及满足制导精度的奖励函数,并构建DDPG网络实现状态空间到动作的尺度变换,得到最优外形决策指令。仿真结果表明:与固定外形航天飞行器相比,通过对外形最优决策,提高了航天飞行器制导精度和横向避障能力,降低了对机载雷达感知能力的要求,节省了感知成本。
中图分类号:
丁天雲, 夏逸, 梅泽伟, 邵星灵, 刘俊. 基于DDPG的变外形航天飞行器碰撞规避的轨迹规划方法[J]. 兵工学报, 2024, 45(11): 3903-3914.
DING Tianyun, XIA Yi, MEI Zewei, SHAO Xingling, LIU Jun. A DDPG-based Trajectory Planning Method for Collision Avoidance of Morphing Spacecraft[J]. Acta Armamentarii, 2024, 45(11): 3903-3914.
图1 变外形智能决策轨迹规划技术结构框图
Fig.1 Structure block diagram of trajectory planning technology for morphing intelligent decision
图2 障碍物示意图
Fig.2 Schematic diagram of no-fly zone

图3 DDPG算法流程图
Fig.3 Training process of DDPG algorithm
图4 DDPG神经网络结构图
Fig.4 Structure diagram of neural network of DDPG
| 训练参数 | 数值 |
|---|---|
| Critic网络学习率 | 0.001 |
| Actor网络学习率 | 0.0001 |
| 折扣因子 | 0.99 |
| 抽样样本大小 | 128 |
| 经验数据集大小 | 1000000 |
| 探索噪声方差 | 0.1 |
| 软更新率 | 0.01 |
| 航向角阈值ψdes/(°) | 5 |
表1 部分仿真初始化参数设置
Table 1 Initialization parameters setting for simulation
| 训练参数 | 数值 |
|---|---|
| Critic网络学习率 | 0.001 |
| Actor网络学习率 | 0.0001 |
| 折扣因子 | 0.99 |
| 抽样样本大小 | 128 |
| 经验数据集大小 | 1000000 |
| 探索噪声方差 | 0.1 |
| 软更新率 | 0.01 |
| 航向角阈值ψdes/(°) | 5 |
图5 飞行航迹对比图
Fig.5 Comparison of flight paths
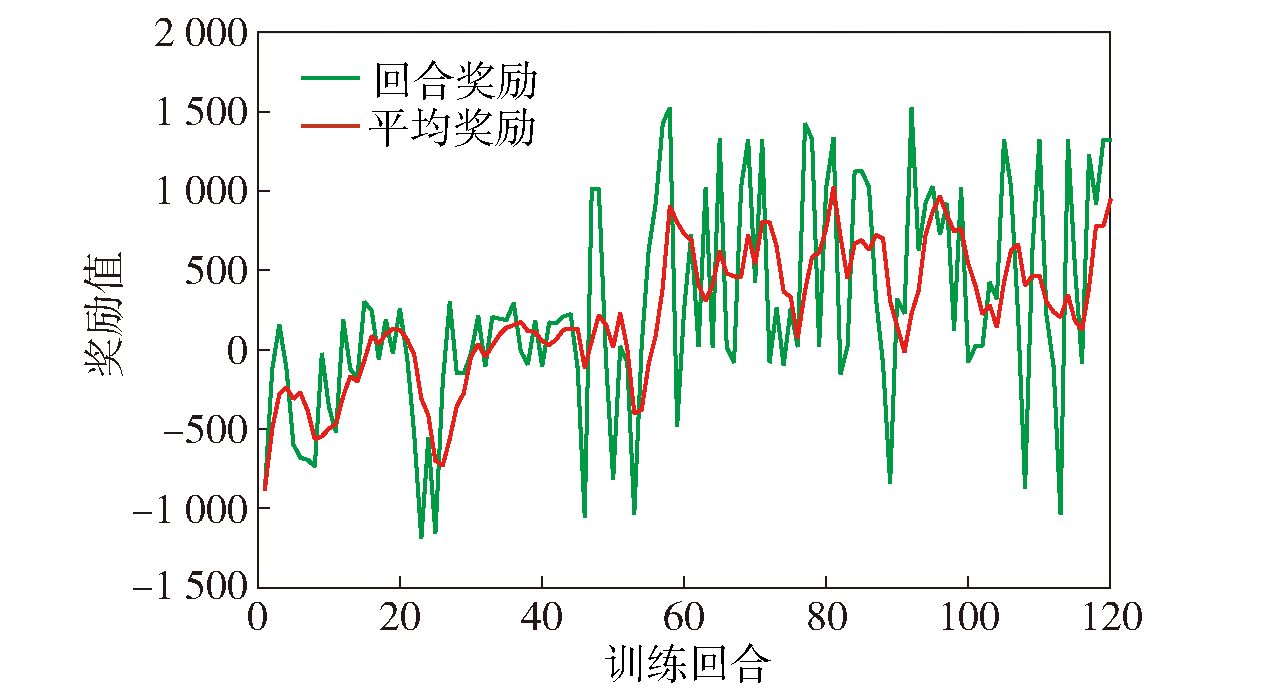
图6 变外形训练奖励曲线
Fig.6 Reward curves for variable configuration training
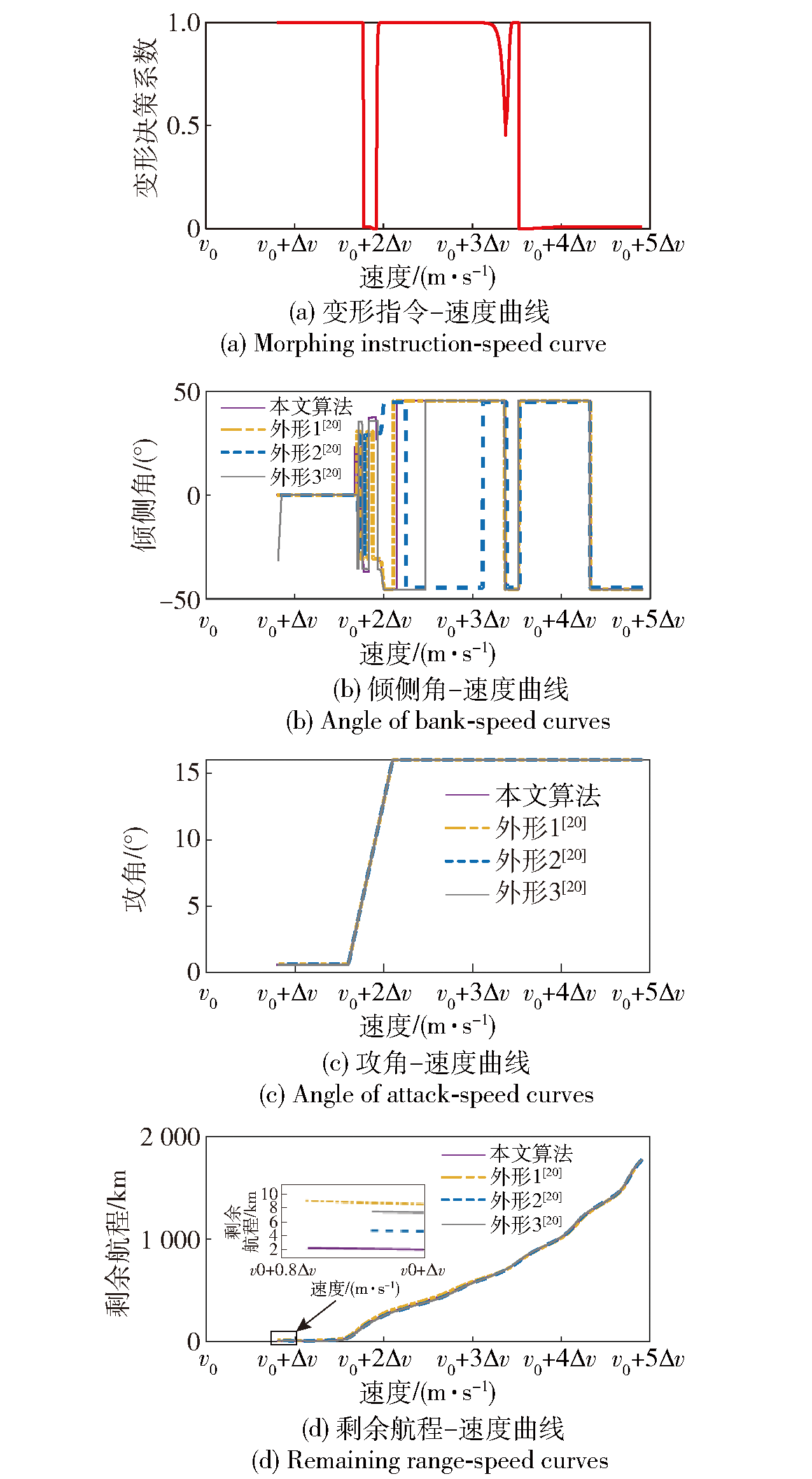
图7 飞行过程变外形相关参数变化图
Fig.7 Variation of related morphing parameters during flying
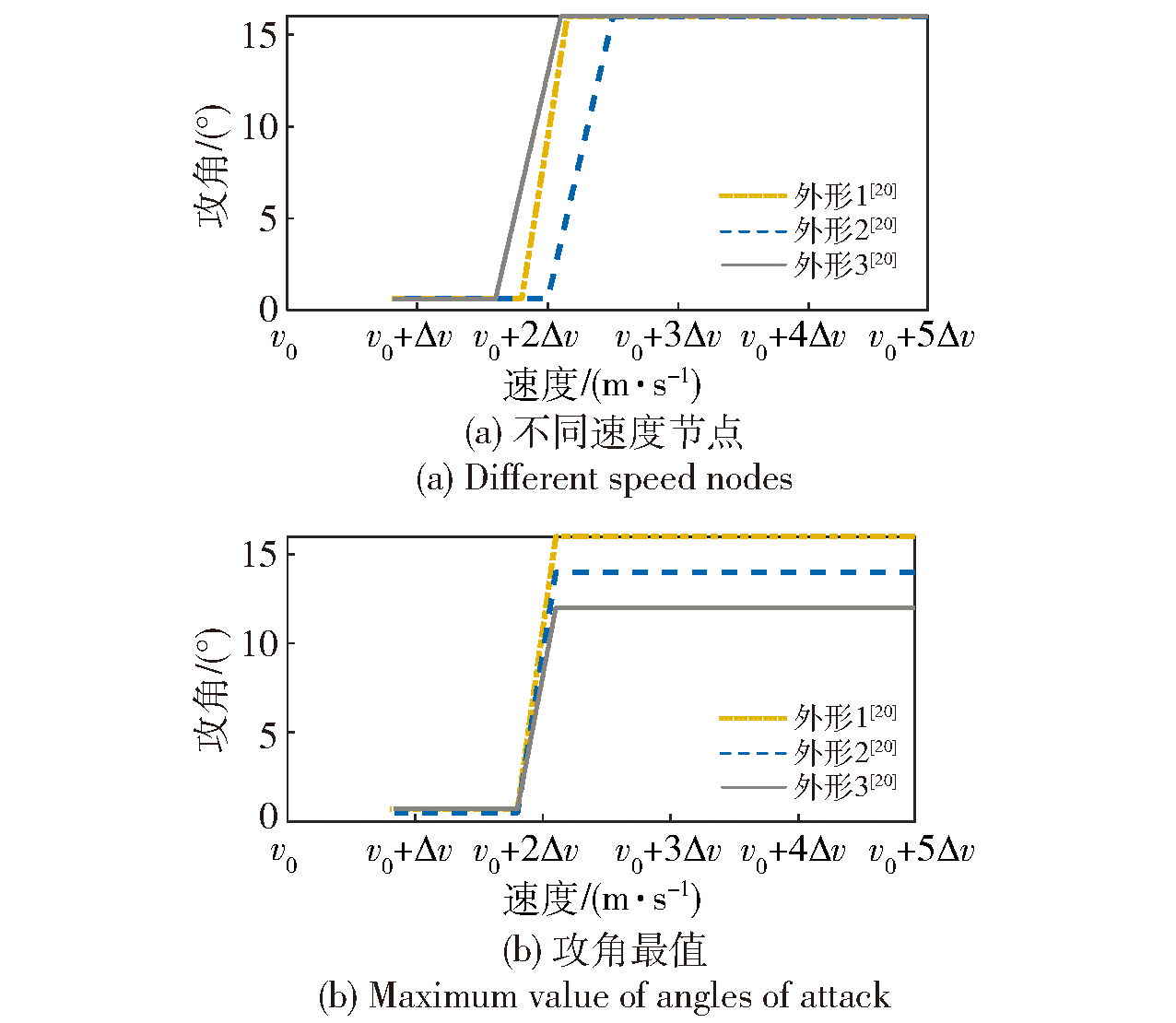
图8 不同攻角剖面图
Fig.8 Profiles of different angles of attack
| 类别 | 经纬度偏差/(°) | 剩余航程/km |
|---|---|---|
| 变外形 | (0.0115,-0.0158) | 2.17 |
| 外形1 | (0.0468,-0.0672) | 9.101 |
| 外形2 | (0.041,-0.0122) | 4.754 |
| 外形3 | (0.0581,-0.0345) | 7.514 |
表2 场景1下的仿真结果对比
Table 2 Simulation results in Scenario 1
| 类别 | 经纬度偏差/(°) | 剩余航程/km |
|---|---|---|
| 变外形 | (0.0115,-0.0158) | 2.17 |
| 外形1 | (0.0468,-0.0672) | 9.101 |
| 外形2 | (0.041,-0.0122) | 4.754 |
| 外形3 | (0.0581,-0.0345) | 7.514 |
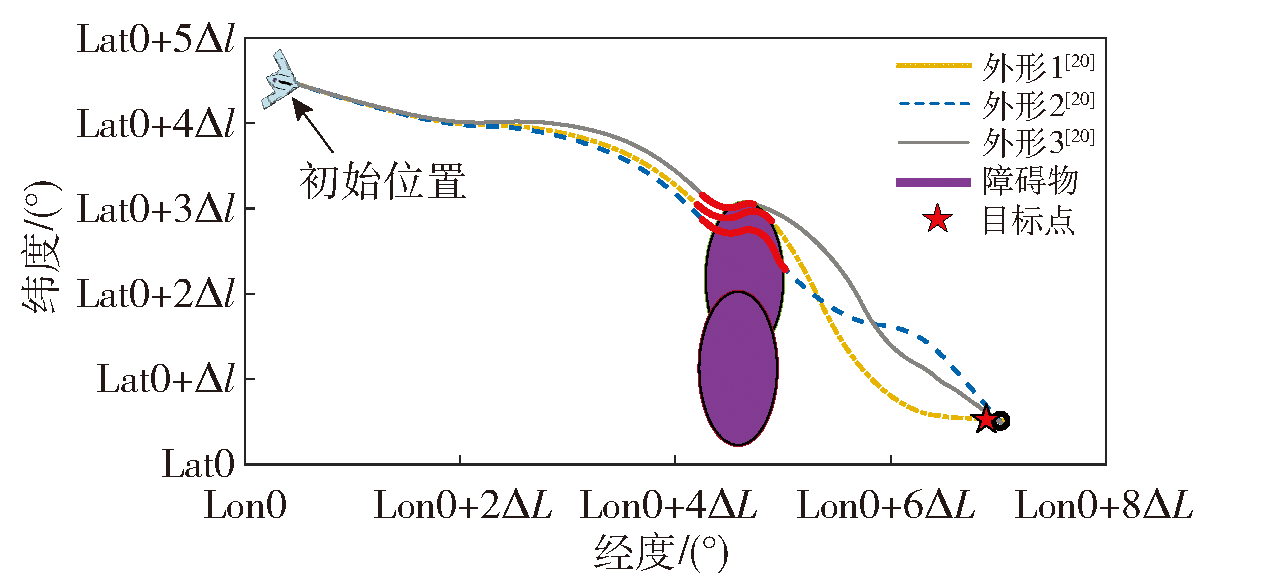
图9 不同速度节点单一外形航迹图
Fig.9 Single shape track diagram of different speed nodes
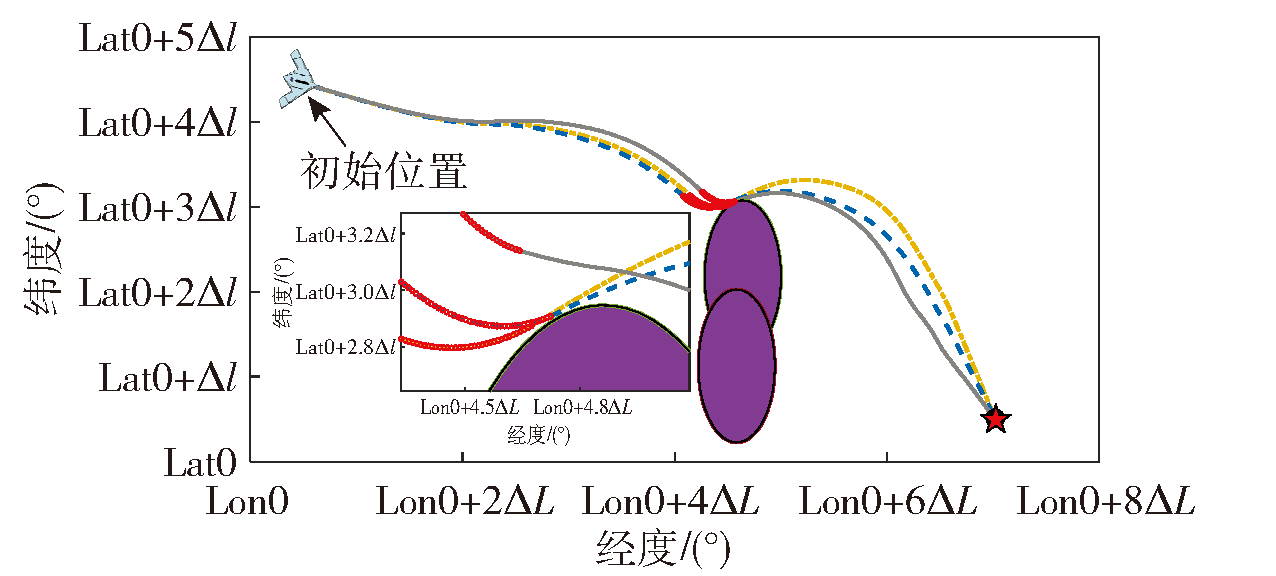
图10 不同速度节点变外形航迹图
Fig.10 Variable shape track diagram of different speed nodes
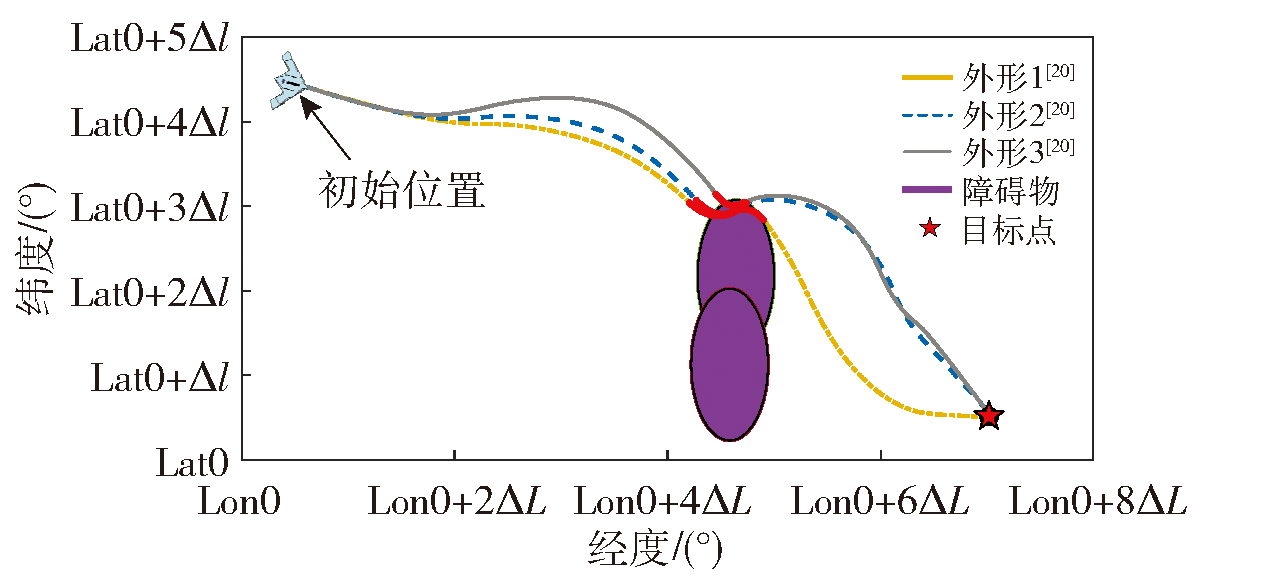
图11 不同攻角最值单一外形航迹图
Fig.11 Single shape track chart with maximum value of different angles of attack
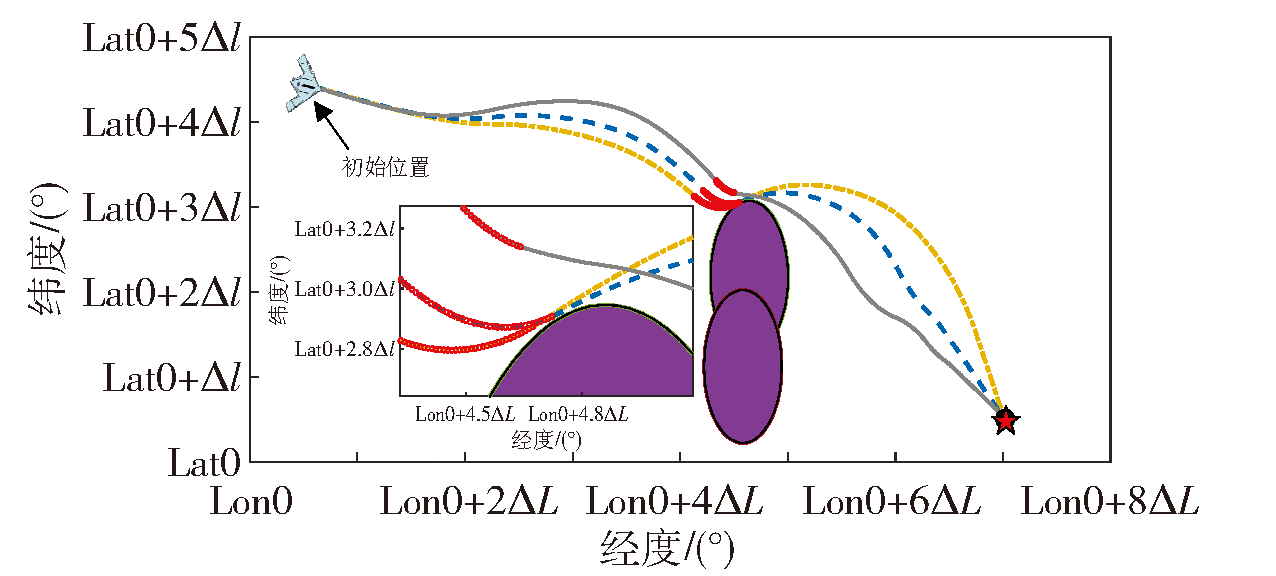
图12 不同攻角最值变外形航迹图
Fig.12 Variable shape track chart with maximum value of different angles of attack
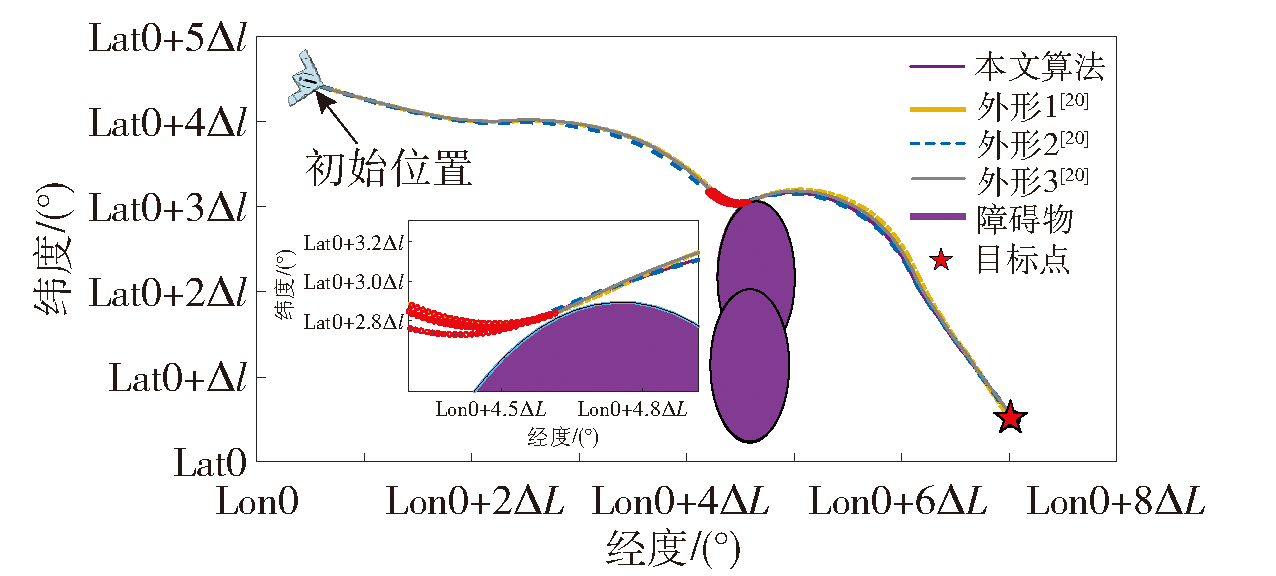
图13 应急避障能力对比图
Fig.13 Comparison of emergency obstacle avoidance
| 变外形 | 外形1 | 外形2 | 外形3 |
|---|---|---|---|
| 83% | 87% | 100% | 93% |
表3 允许的最小感知半径
Table 3 The minimum allowable detection radius
| 变外形 | 外形1 | 外形2 | 外形3 |
|---|---|---|---|
| 83% | 87% | 100% | 93% |
图14 两种方法飞行航迹图
Fig.14 Flight path diagram of two methods
图15 两种方法飞行过程相关参数变化图
Fig.15 Variation diagram of related parameters of two methods
图16 两种方法飞行航迹图
Fig.16 Flight path diagram of two methods
图17 两种方法飞行过程相关参数变化图
Fig.17 Variation diagram of related parameters of two methods
| [1] |
杜万闪, 周洲, 拜昱, 等. 组合式飞行器多体动力学建模与飞行力学特征[J]. 兵工学报, 2023, 44(8): 2245-2262.
doi: 10.12382/bgxb.2022.0282 |
|
|
|
| [2] |
张晚晴, 余文斌, 李静琳, 等. 基于纵程解析解的飞行器智能横程机动再入协同制导[J]. 兵工学报, 2021, 42(7): 1400-1411.
|
|
|
|
| [3] |
姜斌, 孟庆开, 杨浩. 航天器姿轨控制研究综述:微分几何控制方法[J]. 控制与决策, 2023, 38(8): 2079-2092.
|
|
|
|
| [4] |
陈树生, 贾苜梁, 刘衍旭, 等. 变体飞行器变形方式及气动布局设计关键技术研究进展[J]. 航空学报, 2024, 45(5): 629595.
|
|
|
|
| [5] |
吴康盛. 变体飞行器飞行控制与外形决策研究[D]. 长沙: 湖南大学, 2022.
|
|
|
|
| [6] |
张尧, 张婉, 别大卫, 等. 智能变体飞行器研究综述与发展趋势分析[J]. 飞航导弹, 2021(6):14-23.
|
|
|
|
| [7] |
冉茂鹏, 王成才, 刘华华, 等. 变体飞行器控制技术发展现状与展望[J]. 航空学报, 2022, 43(10):432-449.
|
|
|
|
| [8] |
甄子洋, 刘攀, 陆宇平. 变体飞行器智能变形与飞行控制技术研究进展[J]. 南京航空航天大学学报, 2022, 54(6): 995-1006.
|
|
|
|
| [9] |
王子健. 变体飞行器的变形辅助机动控制[D]. 哈尔滨: 哈尔滨工业大学, 2022.
|
|
|
|
| [10] |
|
| [11] |
王青, 刘华华. 变体飞行器智能自主决策与控制[J]. 现代防御技术, 2020, 48(6): 5-11.
doi: 10.3969/j.issn.1009-086x.2020.06.002 |
|
|
|
| [12] |
徐小野, 李爱军, 张丛丛, 等. 基于Q学习的变体无人机控制系统设计[J]. 西北工业大学学报, 2012, 30(3):340-344.
|
|
|
|
| [13] |
闫斌斌, 李勇, 戴沛, 等. 基于增强学习的变体飞行器自适应变体策略与飞行控制方法研究[J]. 西北工业大学学报, 2019, 37(4): 656-663.
|
|
|
|
| [14] |
|
| [15] |
温暖, 刘正华, 祝令谱, 等. 深度强化学习在变体飞行器自主外形优化中的应用[J]. 宇航学报, 2017, 38(11):1153-1159.
|
|
|
|
| [16] |
|
| [17] |
桑晨, 郭杰, 唐胜景, 等. 基于DDPG算法的变体飞行器自主变形决策[J]. 北京航空航天大学学报, 2022, 48(5):910-919.
|
|
|
|
| [18] |
张远, 黄万伟, 聂莹, 等. 一种高速可变形飞行器智能变形决策方法[J]. 宇航学报, 2022, 43(12):1665-1675.
|
|
|
|
| [19] |
吴则良, 叶建川, 王江, 等. 基于深度自动编码器神经网络的飞行器翼型参数降维与优化设计[J]. 兵工学报, 2022, 43(6):1326-1336.
doi: 10.12382/bgxb.2021.0346 |
|
doi: 10.12382/bgxb.2021.0346 |
|
| [20] |
田若岑, 张庆振, 郭云鹤, 等. 基于禁飞区规避的高超声速飞行器再入制导律设计[J]. 空天防御, 2022, 5(2): 65-74.
|
|
|
|
| [21] |
周亮, 王昊宇, 尚海滨, 等. 基于高斯伪谱法的天基再入飞行器滑翔轨迹优化设计研究[J]. 空天防御, 2020, 3(3): 89-95.
|
|
|
|
| [22] |
doi: 10.1109/TCYB.2019.2914717 pmid: 31180878 |
| [23] |
|
| [24] |
|
| [1] | 王培臣, 闫循良, 南汶江, 李新国. 考虑时间约束的近解析滑翔轨迹快速规划方法[J]. 兵工学报, 2024, 45(7): 2294-2305. |
| [2] | 贾一飞, 蒋朝阳. 动态可重构自适应无人车辆编队系统[J]. 兵工学报, 2024, 45(10): 3654-3673. |
| [3] | 杨静, 吴金平, 刘剑, 王永洁, 董汉权. 一种半监督学习潜艇规避防御智能决策方法[J]. 兵工学报, 2024, 45(10): 3474-3487. |
| [4] | 方秋雨, 张蕴霖, 麻壮壮, 邵晋梁. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(S2): 90-102. |
| [5] | 周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405. |
| [6] | 李理, 李旭光, 郭凯杰, 史超, 陈昭文. 国产化环境下基于强化学习的地空协同作战仿真[J]. 兵工学报, 2022, 43(S1): 74-81. |
| [7] | 朱建文, 赵长见, 李小平, 包为民. 基于强化学习的集群多目标分配与智能决策方法[J]. 兵工学报, 2021, 42(9): 2040-2048. |
| [8] | 陈中原, 韦文书, 陈万春. 基于强化学习的多发导弹协同攻击智能制导律[J]. 兵工学报, 2021, 42(8): 1638-1647. |
| [9] | 耿天立, 高昂, 王琦, 段渭军, 胡延苏. 基于深度确定性策略梯度学习的无线反向散射数据卸载优化[J]. 兵工学报, 2021, 42(12): 2655-2663. |
| [10] | 唐传林, 黄长强, 杜海文, 黄汉桥, 丁达理, 罗畅. 无人作战飞行器编队协同攻击轨迹规划研究[J]. 兵工学报, 2014, 35(4): 523-530. |
| [11] | 陈国达, 计时鸣, 金明生, 张才. 面向等残余面形误差的分层修形模具气囊抛光轨迹规划方法[J]. 兵工学报, 2012, 33(6): 724-729. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4