
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (2): 394-405.doi: 10.12382/bgxb.2021.0756
周孝添1, 任宏斌1,*( ), 苏波2, 齐志权2, 汪洋2
), 苏波2, 齐志权2, 汪洋2
收稿日期:2021-11-09
上线日期:2022-06-10
通讯作者:
基金资助:
ZHOU Xiaotian1, REN Hongbin1,*(), SU Bo2, QI Zhiquan2, WANG Yang2
Received:2021-11-09
Online:2022-06-10
摘要:
为充分考虑横纵向耦合和汽车运动学特性对轨迹规划的影响,提出一种分层优化的轨迹规划算法框架。利用贝塞尔曲线的凸包性设计安全走廊约束,以轨迹平滑性为目标函数得到一个基于贝塞尔曲线节点的下层规划器。在上层规划器中,基于下层规划器求解得到的横纵向贝塞尔曲线和车辆运动学模型的微分平坦输出进行三维耦合,构建满足车辆乘坐舒适性、高效性和安全性的目标函数,利用粒子群优化算法对贝塞尔轨迹初始参数进行二次优化得到综合性能最优的行驶轨迹。仿真结果表明:新算法在保证安全性的同时,具有良好的乘坐舒适性和可跟踪性;由于二次规划与粒子群优化算法的求解效率高,此框架实时性强,具有概率完备性。
中图分类号:
周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405.
ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness[J]. Acta Armamentarii, 2023, 44(2): 394-405.

图1 避障轨迹规划
Fig.1 Obstacle avoidance trajectory planning

图2 状态空间与平坦空间的映射关系
Fig.2 Mapping between state space and flat space
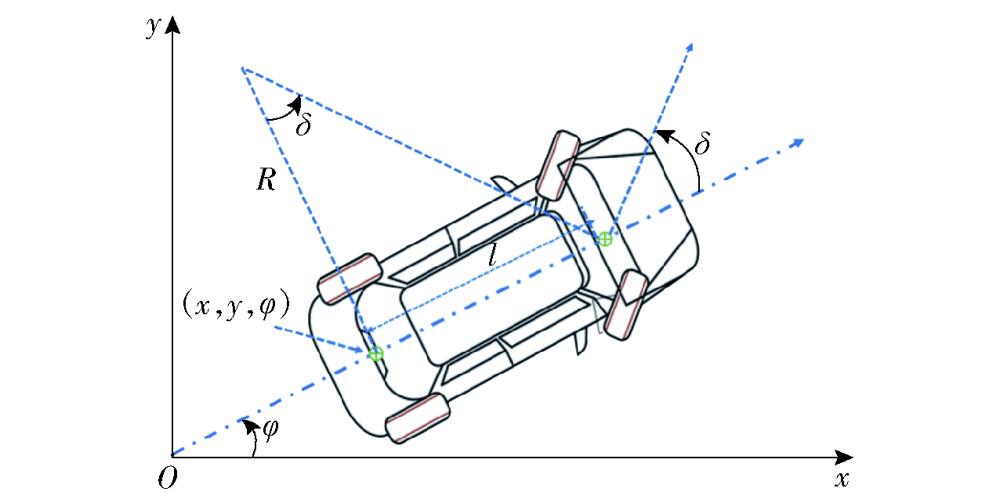
图3 车辆运动学模型
Fig.3 Vehicle kinematics model

图4 算法流程
Fig.4 Flow chart of the algorithm
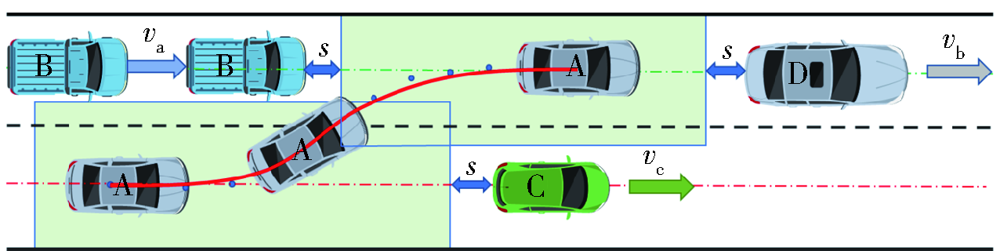
图5 变道避障示意图
Fig.5 Schematic diagram of obstacle avoidance by lane changing
| 参数 | 数值 |
|---|---|
| 汽车质量m/kg | 1217 |
| 转动惯量Iz/(kg·m2) | 1020 |
| 质心到前轴距离Lf/m | 1.165 |
| 质心到后轴距离Lr/m | 1.265 |
| 前轮转向刚度Cf/(N·rad-1) | 40000 |
| 后轮转向刚度Cr/(N·rad-1) | 40000 |
| 车道有效宽度D/m | 3.6 |
表1 仿真实验参数
Table 1 Simulation experiment parameters
| 参数 | 数值 |
|---|---|
| 汽车质量m/kg | 1217 |
| 转动惯量Iz/(kg·m2) | 1020 |
| 质心到前轴距离Lf/m | 1.165 |
| 质心到后轴距离Lr/m | 1.265 |
| 前轮转向刚度Cf/(N·rad-1) | 40000 |
| 后轮转向刚度Cr/(N·rad-1) | 40000 |
| 车道有效宽度D/m | 3.6 |

图6 5次多项式采样过程
Fig.6 Quintic polynomial sampling process
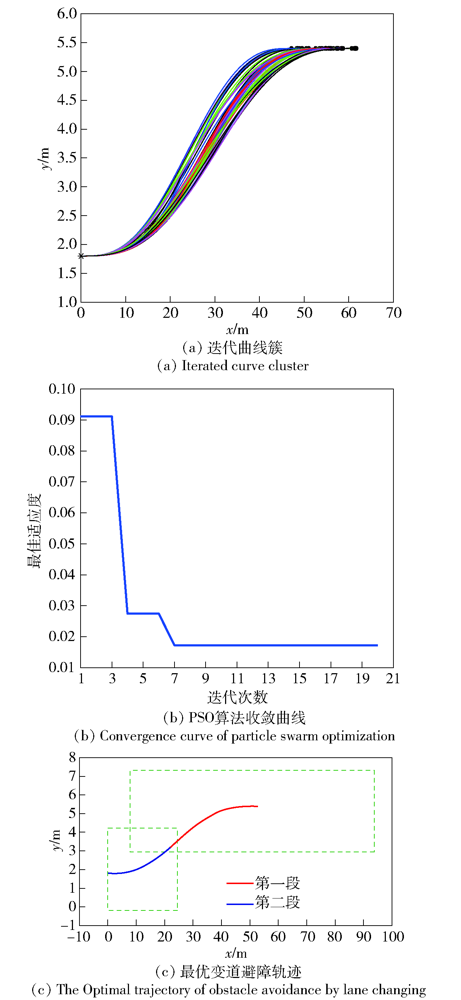
图7 基于微分平坦分层轨迹规划仿真过程
Fig.7 Simulation process of hierarchical trajectory planning based on differential flatness

图8 硬件在环(HIL)实验平台
Fig.8 Hardware-in-the-loop (HIL) experimental platform
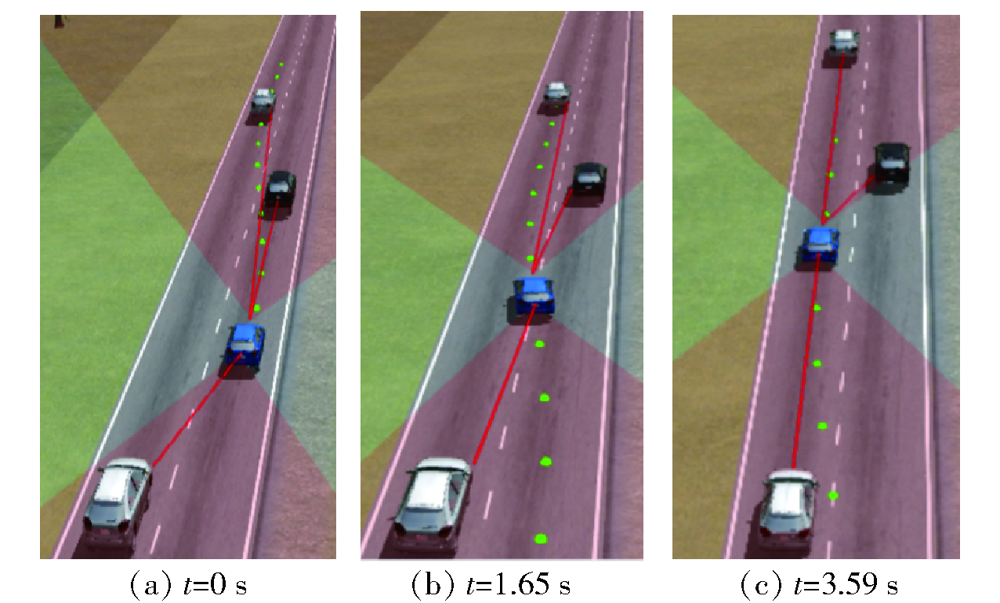
图9 变道仿真过程
Fig.9 Lane changing simulation process
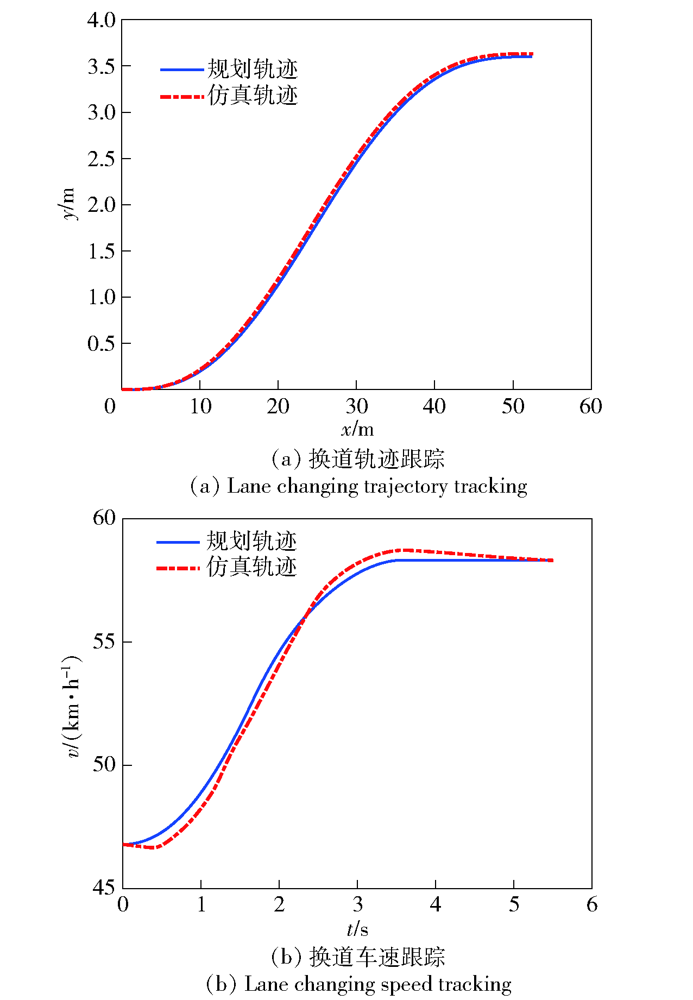
图10 换道轨迹跟踪仿真结果
Fig.10 Simulation results of lane changingtrajectory tracking
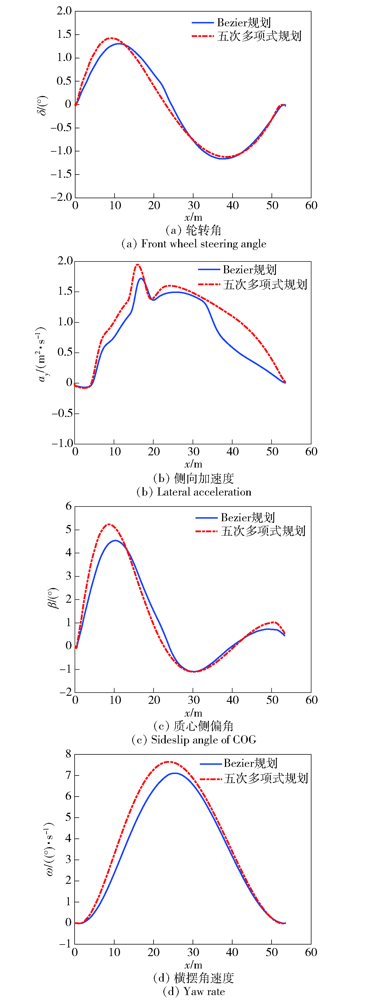
图11 车辆换道性能参数
Fig.11 Lane changing performance parameters of the vehicle

图12 无人驾驶平台
Fig.12 Self-driving platform

图13 换道交通场景
Fig.13 Lane changing traffic scene

图14 换道轨迹跟踪结果
Fig.14 Tracking result for lane changing trajectory
| [1] |
doi: 10.1016/j.engappai.2021.104211 URL |
| [2] |
doi: 10.1088/1755-1315/714/4/042067 |
| [3] |
doi: 10.1109/TVT.25 URL |
| [4] |
|
| [5] |
聂枝根, 王万琼, 赵伟强, 等. 基于轨迹预瞄的智能汽车变道动态轨迹规划与跟踪控制[J]. 交通运输工程学报, 2020, 104(2):151-164.
|
|
|
|
| [6] |
doi: 10.1109/25.966586 URL |
| [7] |
牛国臣, 李文帅, 魏洪旭. 基于双五次多项式的智能汽车换道轨迹规划[J]. 汽车工程, 2021, 43(7):978-986,1004.
|
|
|
|
| [8] |
|
| [9] |
doi: 10.1177/0954407011430275 URL |
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
赵新, 纪永祥, 罗熙斌, 等. 基于改进粒子群优化算法的近炸引信最佳炸高计算方法[J]. 兵工学报, 2021, 42(5):924-929.
|
|
doi: 10.3969/j.issn.1000-1093.2021.05.004 |
|
| [17] |
杜广泽, 张旭东, 邹渊, 等. 非结构道路场景下轮式无人车辆避障算法[J]. 兵工学报, 2020, 41(10):2096-2105.
doi: 10.3969/j.issn.1000-1093.2020.10.020 |
|
|
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
doi: 10.1016/S0001-4575(03)00010-1 URL |
| [22] |
|
| [23] |
王沙晶. 基于Frenet坐标系采样的自动驾驶轨迹规划算法研究[D]. 兰州: 兰州理工大学, 2019.
|
|
|
|
| [24] |
陈龙, 邹凯, 蔡英凤, 等. 基于NMPC的智能汽车纵横向综合轨迹跟踪控制[J]. 汽车工程, 2021, 43(2):153-161.
|
|
|
|
| [25] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 13(16):1128-1137.
|
|
|
| [1] | 潘作栋,周悦,郭威,徐高飞,孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128. |
| [2] | 李欢欢, 刘辉, 盖江涛, 李训明. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924. |
| [3] | 方秋雨, 张蕴霖, 麻壮壮, 邵晋梁. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(S2): 90-102. |
| [4] | 王磊, 徐超, 李淼, 赵慧武. 多飞行器协同任务分配的改进粒子群优化算法[J]. 兵工学报, 2023, 44(8): 2224-2232. |
| [5] | 范博洋, 赵高鹏, 薄煜明, 吴祥. 多目标空地异构无人系统协同任务分配方法[J]. 兵工学报, 2023, 44(6): 1564-1575. |
| [6] | 陈美杉, 刘赢, 曾维贵, 钱坤. 空射诱饵弹干扰资源动态分配策略[J]. 兵工学报, 2023, 44(5): 1443-1455. |
| [7] | 卢佳兴, 刘海鸥, 关海杰, 李德润, 陈慧岩, 刘龙龙. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971. |
| [8] | 张渊博, 项昌乐, 王伟达, 陈泳丹. 基于粒子群优化-蚁群融合算法的分布式电驱动车辆模型预测转矩协调控制策略[J]. 兵工学报, 2023, 44(11): 3253-3258. |
| [9] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [10] | 周铖, 罗杨, 魏江, 曹宏瑞, 兰海, 张万昊. 履带车辆制动器扭振信号瞬时频率特征提取方法研究[J]. 兵工学报, 2023, 44(1): 316-324. |
| [11] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [12] | 郭志明, 王迪, 庞婷, 李娟, 赵丹, 杨建新. 面向装备体系联合检验的指数分布定时截尾方案优化研究[J]. 兵工学报, 2022, 43(S1): 203-207. |
| [13] | 陈军, 张岳, 陈晓威, 佟龑. 基于模糊灰色认知图的复杂战场智能态势感知建模方法[J]. 兵工学报, 2022, 43(5): 1093-1106. |
| [14] | 许晓东, 唐圣金, 谢建, 于传强, 王凤飞, 韩洋洋. 随机退化应力作用下设备剩余寿命预测方法[J]. 兵工学报, 2022, 43(3): 712-719. |
| [15] | 田恒, 许荣滨, 姜艳红, 张文虎, 邓四二. 基于离散粒子群优化算法的多值属性系统故障诊断策略[J]. 兵工学报, 2022, 43(12): 3240-3246. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4