
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (3): 240217-.doi: 10.12382/bgxb.2024.0217
赵薇1, 王峰2,*( ), 马星宇1, 翟伟光1, 孟鹏帅1
), 马星宇1, 翟伟光1, 孟鹏帅1
收稿日期:2024-03-26
上线日期:2025-03-26
通讯作者:
基金资助:
ZHAO Wei1, WANG Feng2,*(), MA Xingyu1, ZHAI Weiguang1, MENG Pengshuai1
Received:2024-03-26
Online:2025-03-26
摘要:
针对同步定位与建图(Simultaneous Localization and Mapping,SLAM)算法在动态场景中存在定位精度低且无法生成稠密地图的问题,提出一种基于动态区域剔除与稠密建图的视觉SLAM算法。在原ORB-SLAM3算法的基础上新建动态特征点检测线程,使用YOLOX网络获取动态场景语义信息及物体检测框,同时结合语义和几何约束检测特征点运动状态,提出动态特征点剔除算法,旨在精准实现动态特征点的剔除。随后设计稠密建图线程,基于关键帧及相应位姿构建稠密点云地图,利用地图中剩余的静态特征点,去除动态物体造成的重影,实现稠密地图的构建。在公开TUM数据集和真实动态环境进行验证,在TUM数据集的动态环境下,新算法有效消除了动态物体对位姿估计的影响,提升了SLAM算法在动态场景中的定位与建图的鲁棒性。
中图分类号:
赵薇, 王峰, 马星宇, 翟伟光, 孟鹏帅. 基于动态区域剔除与稠密地图构建的视觉SLAM算法[J]. 兵工学报, 2025, 46(3): 240217-.
ZHAO Wei, WANG Feng, MA Xingyu, ZHAI Weiguang, MENG Pengshuai. Visual SLAM Algorithm Based on Dynamic Region Exclusion and Dense Map Construction[J]. Acta Armamentarii, 2025, 46(3): 240217-.
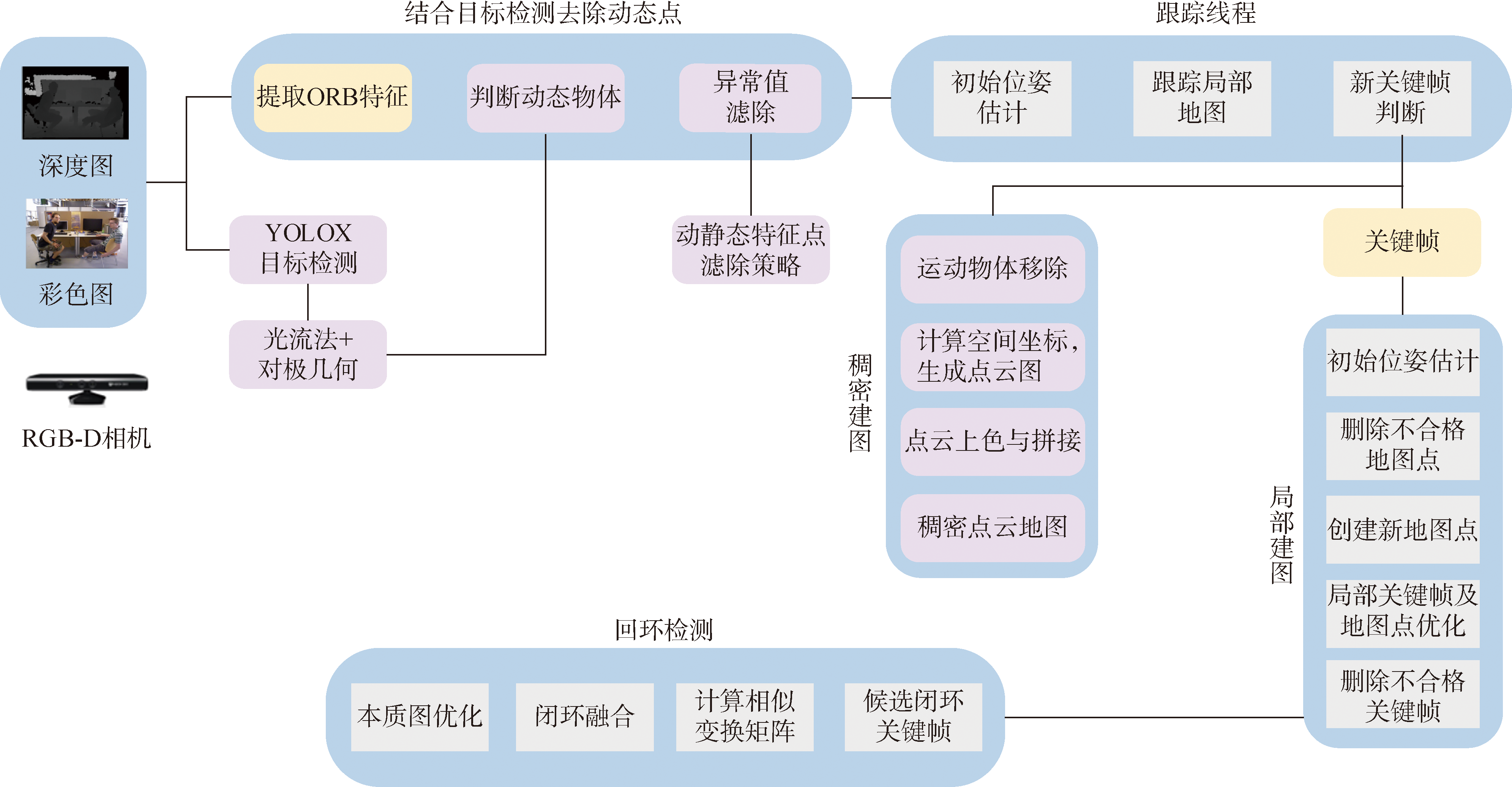
图1 系统框架
Fig.1 System framework

图2 YOLOX的检测效果
Fig.2 YOLOX detection effect
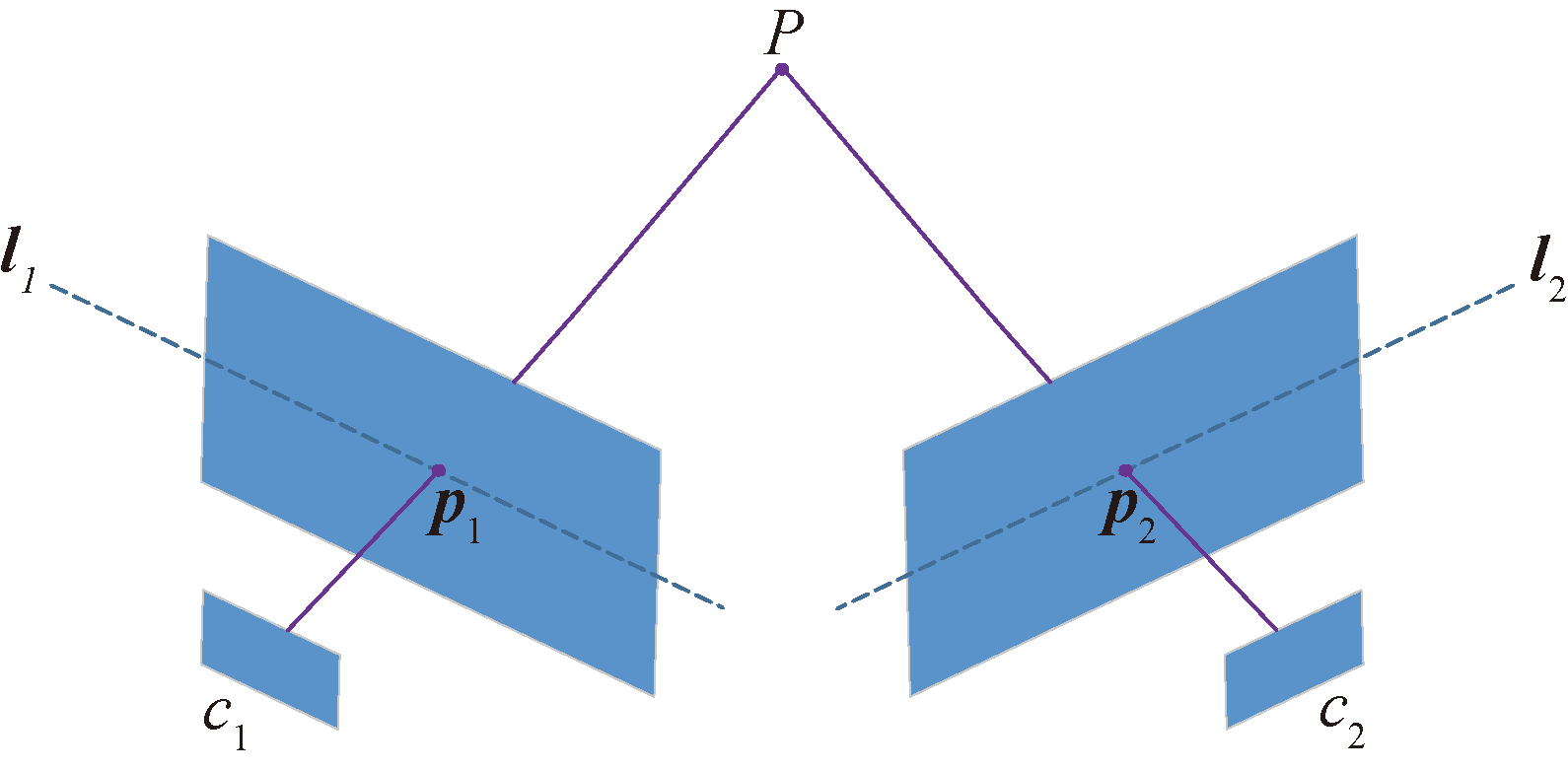
图3 对极几何原理图
Fig.3 Schematic diagram of polar geometry
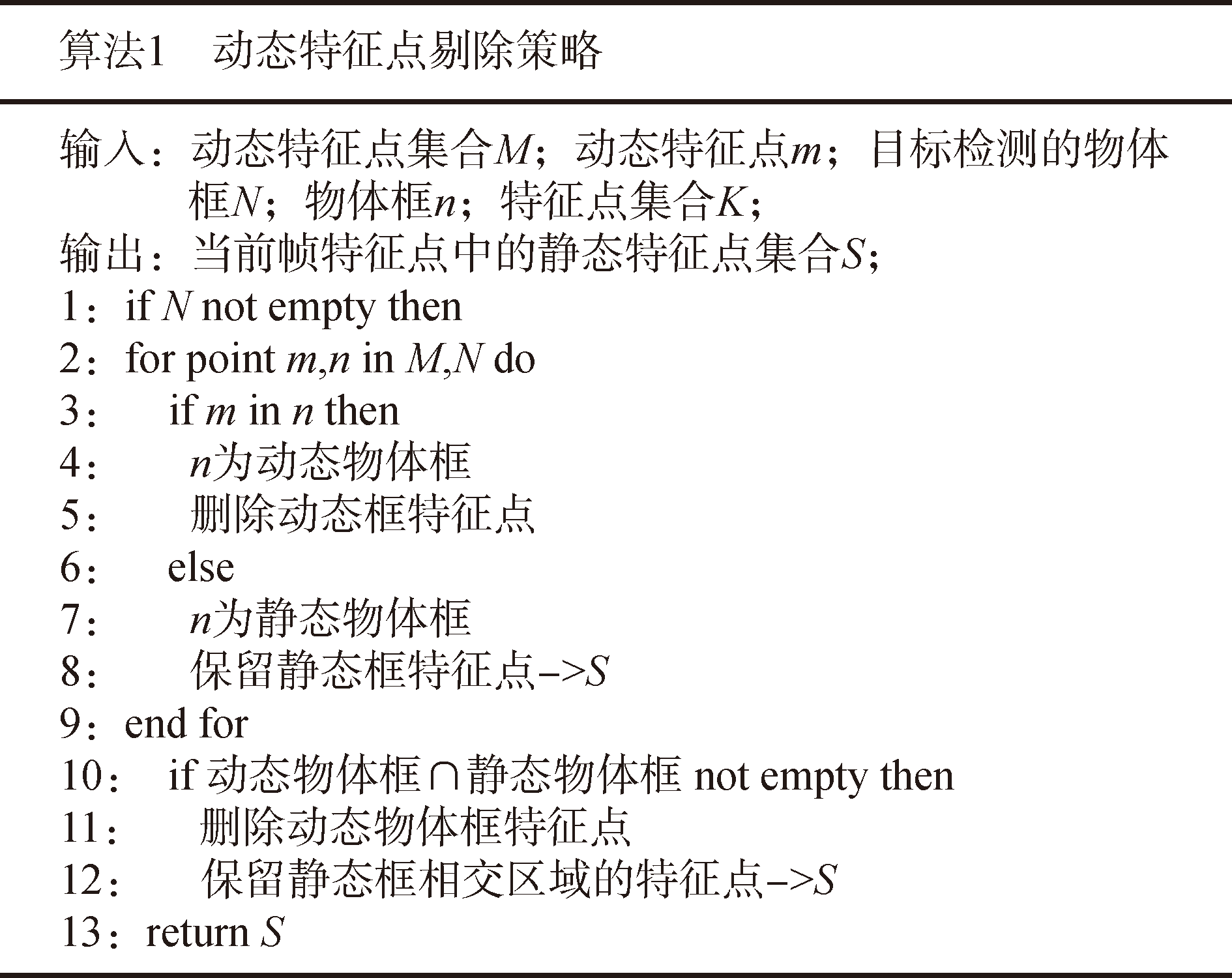
图4 动态特征点剔除策略
Fig.4 Dynamic feature point culling strategy

图5 动态特征点剔除
Fig.5 Dynamic feature point culling
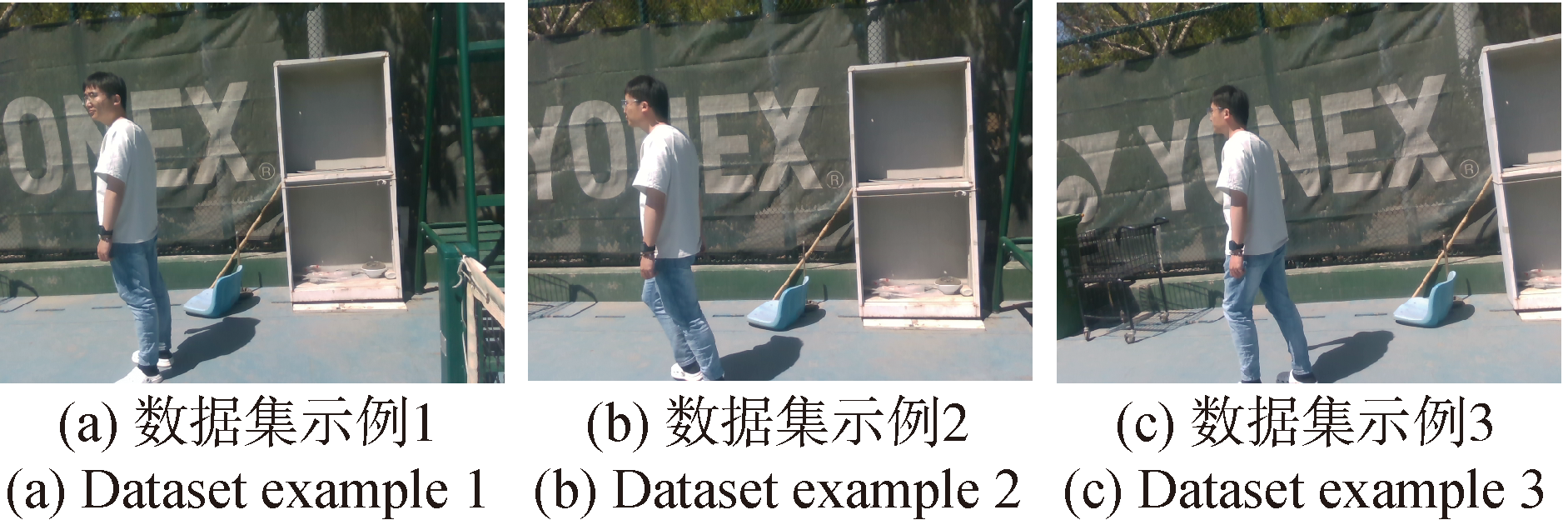
图6 真实场景RGB图像效果
Fig.6 The effect of RGB images in the real scene
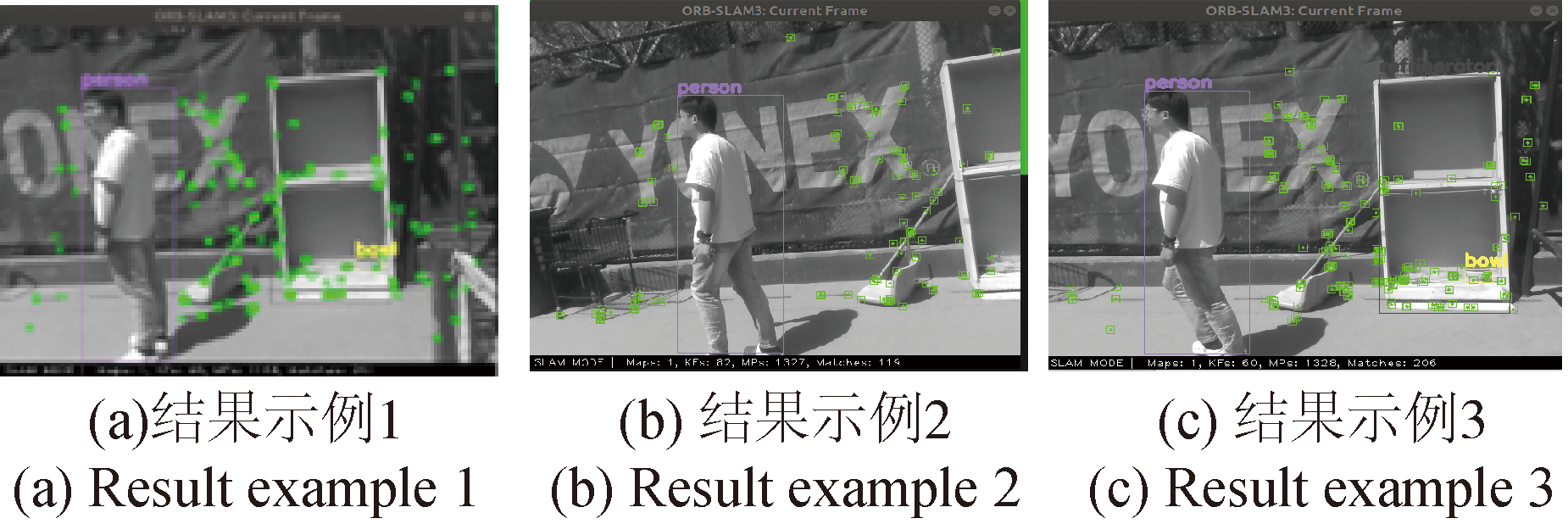
图7 真实场景下去除动态特征点效果
Fig.7 The effect of removing the dynamic feature points in the real scene

图8 ORB-SLAM3算法的估计轨迹误差示意图
Fig.8 Schematic diagram of the estimated trajectory error of ORB-SLAM3 algorithm

图9 本文算法的估计轨迹误差示意图
Fig.9 Schematic diagram of the estimated trajectory error of the proposed algorithm
| 结果 | ORB-SLAM3 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_walking_xyz | 0.2767 | 0.2495 | 0.2360 | 0.1197 | 0.0149 | 0.0128 | 0.0110 | 0.0076 |
| fr3_walking_static | 0.4242 | 0.3711 | 0.3491 | 0.2055 | 0.0098 | 0.0088 | 0.0073 | 0.0051 |
| fr3_walking_rpy | 0.7765 | 0.6571 | 0.6436 | 0.4137 | 0.0425 | 0.0327 | 0.0263 | 0.0271 |
| fr3_walking_half | 0.3619 | 0.3443 | 0.3515 | 0.1114 | 0.0234 | 0.0194 | 0.0164 | 0.0131 |
| fr3_sitting_static | 0.0107 | 0.0093 | 0.0081 | 0.0052 | 0.0058 | 0.0049 | 0.0042 | 0.0030 |
| fr3_sitting_xyz | 0.0099 | 0.0088 | 0.0081 | 0.0045 | 0.0134 | 0.0117 | 0.0106 | 0.0066 |
| fr3_sitting_rpy | 0.0242 | 0.0174 | 0.0124 | 0.0169 | 0.0354 | 0.0278 | 0.0223 | 0.0219 |
表1 ORB-SLAM3与本文算法的绝对轨迹误差对比
Table 1 Comparison of absolute trajectory errors of ORB-SLAM3 and the proposed algorithm
| 结果 | ORB-SLAM3 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_walking_xyz | 0.2767 | 0.2495 | 0.2360 | 0.1197 | 0.0149 | 0.0128 | 0.0110 | 0.0076 |
| fr3_walking_static | 0.4242 | 0.3711 | 0.3491 | 0.2055 | 0.0098 | 0.0088 | 0.0073 | 0.0051 |
| fr3_walking_rpy | 0.7765 | 0.6571 | 0.6436 | 0.4137 | 0.0425 | 0.0327 | 0.0263 | 0.0271 |
| fr3_walking_half | 0.3619 | 0.3443 | 0.3515 | 0.1114 | 0.0234 | 0.0194 | 0.0164 | 0.0131 |
| fr3_sitting_static | 0.0107 | 0.0093 | 0.0081 | 0.0052 | 0.0058 | 0.0049 | 0.0042 | 0.0030 |
| fr3_sitting_xyz | 0.0099 | 0.0088 | 0.0081 | 0.0045 | 0.0134 | 0.0117 | 0.0106 | 0.0066 |
| fr3_sitting_rpy | 0.0242 | 0.0174 | 0.0124 | 0.0169 | 0.0354 | 0.0278 | 0.0223 | 0.0219 |
| 结果 | ORB-SLAM3 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_walking_xyz | 0.0307 | 0.0253 | 0.0207 | 0.0174 | 0.0089 | 0.0079 | 0.0077 | 0.0041 |
| fr3_walking_static | 0.0177 | 0.0126 | 0.0095 | 0.0124 | 0.0080 | 0.0063 | 0.0052 | 0.004 |
| fr3_walking_rpy | 0.0340 | 0.0272 | 0.0215 | 0.0203 | 0.0292 | 0.0166 | 0.0121 | 0.0240 |
| fr3_walking_half | 0.0263 | 0.0201 | 0.0155 | 0.0170 | 0.0173 | 0.0130 | 0.0100 | 0.0115 |
| fr3_sitting_static | 0.0056 | 0.0048 | 0.0040 | 0.0029 | 0.0051 | 0.0044 | 0.0039 | 0.0026 |
| fr3_sitting_xyz | 0.0115 | 0.0102 | 0.0092 | 0.0052 | 0.0106 | 0.0089 | 0.0077 | 0.0057 |
| fr3_sitting_rpy | 0.0231 | 0.0146 | 0.0111 | 0.0179 | 0.0170 | 0.0117 | 0.0079 | 0.0123 |
表2 ORB-SLAM3与本文算法的相对轨迹误差对比
Table 2 Comparison of relative trajectory errors of ORB-SLAM3 and the proposed algorithm
| 结果 | ORB-SLAM3 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_walking_xyz | 0.0307 | 0.0253 | 0.0207 | 0.0174 | 0.0089 | 0.0079 | 0.0077 | 0.0041 |
| fr3_walking_static | 0.0177 | 0.0126 | 0.0095 | 0.0124 | 0.0080 | 0.0063 | 0.0052 | 0.004 |
| fr3_walking_rpy | 0.0340 | 0.0272 | 0.0215 | 0.0203 | 0.0292 | 0.0166 | 0.0121 | 0.0240 |
| fr3_walking_half | 0.0263 | 0.0201 | 0.0155 | 0.0170 | 0.0173 | 0.0130 | 0.0100 | 0.0115 |
| fr3_sitting_static | 0.0056 | 0.0048 | 0.0040 | 0.0029 | 0.0051 | 0.0044 | 0.0039 | 0.0026 |
| fr3_sitting_xyz | 0.0115 | 0.0102 | 0.0092 | 0.0052 | 0.0106 | 0.0089 | 0.0077 | 0.0057 |
| fr3_sitting_rpy | 0.0231 | 0.0146 | 0.0111 | 0.0179 | 0.0170 | 0.0117 | 0.0079 | 0.0123 |
| 结果 | ATE | RPE | ||||||
|---|---|---|---|---|---|---|---|---|
| Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | |
| fr3_walking_xyz | 0.0553 | 0.021 | 0.016 | 0.0148 | 0.0653 | 0.026 | 0.0221 | 0.0079 |
| fr3_walking_static | 0.0049 | 0.081 | 0.0060 | 0.0098 | 0.0100 | 0.022 | 0.0116 | 0.0080 |
| fr3_walking_rpy | 0.0386 | 0.146 | 0.0412 | 0.0424 | 0.0680 | 0.024 | 0.0132 | 0.0291 |
| fr3_walking_half | 0.0626 | 0.025 | 0.0323 | 0.0234 | 0.0167 | 0.027 | 0.0235 | 0.0173 |
| fr3_sitting_static | 0.0045 | 0.0055 | 0.0057 | 0.0223 | 0.0064 | 0.0050 | ||
| fr3_sitting_xyz | 0.0134 | 0.0106 | ||||||
表3 不同算法RMSE值对比
Table 3 Comparison of RMSE values for different algorithms
| 结果 | ATE | RPE | ||||||
|---|---|---|---|---|---|---|---|---|
| Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | |
| fr3_walking_xyz | 0.0553 | 0.021 | 0.016 | 0.0148 | 0.0653 | 0.026 | 0.0221 | 0.0079 |
| fr3_walking_static | 0.0049 | 0.081 | 0.0060 | 0.0098 | 0.0100 | 0.022 | 0.0116 | 0.0080 |
| fr3_walking_rpy | 0.0386 | 0.146 | 0.0412 | 0.0424 | 0.0680 | 0.024 | 0.0132 | 0.0291 |
| fr3_walking_half | 0.0626 | 0.025 | 0.0323 | 0.0234 | 0.0167 | 0.027 | 0.0235 | 0.0173 |
| fr3_sitting_static | 0.0045 | 0.0055 | 0.0057 | 0.0223 | 0.0064 | 0.0050 | ||
| fr3_sitting_xyz | 0.0134 | 0.0106 | ||||||
| 结果 | ATE | RPE | ||||||
|---|---|---|---|---|---|---|---|---|
| Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | |
| fr3_walking_xyz | 0.0376 | 0.012 | 0.0087 | 0.0076 | 0.0398 | 0.016 | 0.007 | 0.0040 |
| fr3_walking_static | 0.0027 | 0.022 | 0.0033 | 0.0050 | 0.0067 | 0.014 | 0.0046 | 0.0049 |
| fr3_walking_rpy | 0.0235 | 0.105 | 0.0301 | 0.0271 | 0.0398 | 0.012 | 0.0053 | 0.0240 |
| r3_walking_half | 0.0347 | 0.017 | 0.0158 | 0.0131 | 0.1042 | 0.014 | 0.0097 | 0.0114 |
| fr3_sitting_static | 0.0030 | 0.0024 | 0.0029 | 0.0132 | 0.0035 | 0.0026 | ||
| fr3_sitting_xyz | 0.0219 | 0.0057 | ||||||
表4 不同算法S.D.值对比
Table 4 Comparison of S.D.values for different algorithms
| 结果 | ATE | RPE | ||||||
|---|---|---|---|---|---|---|---|---|
| Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | Det-SLAM[ | RDS[ | FD-SLAM[ | 本文算法 | |
| fr3_walking_xyz | 0.0376 | 0.012 | 0.0087 | 0.0076 | 0.0398 | 0.016 | 0.007 | 0.0040 |
| fr3_walking_static | 0.0027 | 0.022 | 0.0033 | 0.0050 | 0.0067 | 0.014 | 0.0046 | 0.0049 |
| fr3_walking_rpy | 0.0235 | 0.105 | 0.0301 | 0.0271 | 0.0398 | 0.012 | 0.0053 | 0.0240 |
| r3_walking_half | 0.0347 | 0.017 | 0.0158 | 0.0131 | 0.1042 | 0.014 | 0.0097 | 0.0114 |
| fr3_sitting_static | 0.0030 | 0.0024 | 0.0029 | 0.0132 | 0.0035 | 0.0026 | ||
| fr3_sitting_xyz | 0.0219 | 0.0057 | ||||||

图10 稀疏点云地图
Fig.10 Sparse point cloud map

图11 构建稠密地图
Fig.11 Construction of dense map
| [1] |
张一凡, 缪远东, 陈畅宇, 等. 户外增强现实军事仿真系统[J]. 光学技术, 2019, 45(5):622-628.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
张福斌, 张炳烁, 杨玉帅. 基于单目/IMU/里程计融合的 SLAM 算法[J]. 兵工学报, 2022, 43(11):2810-2818.
|
|
doi: 10.12382/bgxb.2022.0240 |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
罗元, 沈吉祥, 李方宇. 动态环境下基于深度学习的视觉SLAM研究综述[J]. 半导体光电, 2024, 45(1):1-10.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
岳胜哲, 王正杰. 基于实例分割与光流的动态环境SLAM[J]. 兵工学报, 2024, 45(1):156-165.
doi: 10.12382/bgxb.2023.0568 |
|
doi: 10.12382/bgxb.2023.0568 |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [1] | 赵春博, 莫波, 李大维, 赵洁. 成像制导运动模糊目标检测算法[J]. 兵工学报, 2025, 46(2): 240376-. |
| [2] | 齐铖, 谢军伟, 张浩为, 王雷, 王瑞君, 费太勇. 基于低空目标检测的分布式多输入多输出雷达功率分配合作博弈算法[J]. 兵工学报, 2025, 46(1): 231199-. |
| [3] | 冯迎宾, 郭枭尊, 晏佳华. 基于多尺度注意力机制的无人机小目标检测算法[J]. 兵工学报, 2025, 46(1): 231124-. |
| [4] | 姚雨, 宋春林, 邵江琦. 无人机航拍军事车辆实时检测及定位算法[J]. 兵工学报, 2024, 45(S1): 354-360. |
| [5] | 王烨茹, 杨耿, 刘述, 许啸, 陈华杰, 秦飞巍, 徐华杰. 基于图神经网络的车辆目标遮蔽关重部位检测[J]. 兵工学报, 2024, 45(S1): 242-251. |
| [6] | 孙浩, 黎海青, 梁彦, 马超雄, 吴翰. 基于知识辅助深度强化学习的巡飞弹组动态突防决策[J]. 兵工学报, 2024, 45(9): 3161-3176. |
| [7] | 常天庆, 张杰, 赵立阳, 韩斌, 张雷. 基于可见光与红外图像融合的装甲目标检测算法[J]. 兵工学报, 2024, 45(7): 2085-2096. |
| [8] | 刘鹏, 熊泽宇, 景文博, 冯萱, 张俊豪, 刘桐伯, 吴雪妮, 夏璇, 万琳琳, 赵海丽. 降质靶标检测算法[J]. 兵工学报, 2024, 45(6): 2065-2075. |
| [9] | 梁国龙, 罗钧戈, 郝宇, 付进. 一种基于组合子阵协方差矩阵的阵列扩展方法[J]. 兵工学报, 2024, 45(5): 1717-1724. |
| [10] | 沈英, 刘贤财, 王舒, 黄峰. 基于偏振编码图像的低空伪装目标实时检测[J]. 兵工学报, 2024, 45(5): 1374-1383. |
| [11] | 熊光明, 罗震, 孙冬, 陶俊峰, 唐泽月, 吴超. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3): 893-906. |
| [12] | 沈英, 黄伟达, 周则兵, 黄峰, 王舒. 基于特征波段偏振成像的差异增强伪装目标检测[J]. 兵工学报, 2024, 45(10): 3488-3498. |
| [13] | 岳胜哲, 王正杰. 基于实例分割与光流的动态环境SLAM[J]. 兵工学报, 2024, 45(1): 156-165. |
| [14] | 秦昊林, 许廷发, 李佳男. 基于超像素注意力和孪生结构的半监督高光谱显著性目标检测[J]. 兵工学报, 2023, 44(9): 2639-2649. |
| [15] | 惠康华, 杨卫, 刘浩翰, 张智, 郑锦, 百晓. 基于YOLOv5的增强多尺度目标检测方法[J]. 兵工学报, 2023, 44(9): 2600-2610. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4