
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (9): 2600-2610.doi: 10.12382/bgxb.2022.1147
所属专题: 智能系统与装备技术
惠康华1, 杨卫1, 刘浩翰1, 张智1,*( ), 郑锦2, 百晓2
), 郑锦2, 百晓2
收稿日期:2022-11-30
上线日期:2023-04-10
通讯作者:
基金资助:
HUI Kanghua1, YANG Wei1, LIU Haohan1, ZHANG Zhi1,*(), ZHENG Jin2, BAI Xiao2
Received:2022-11-30
Online:2023-04-10
摘要:
针对复杂场景下初始锚框难以匹配目标及多尺度检测能力不强的问题,提出一种基于YOLOv5的增强多尺度目标检测(EM-YOLOv5)方法。通过Kmeans++聚类算法,获得适应当前检测场景下的多尺度初始化锚框,使得网络更容易捕捉到不同尺度目标;在Bottleneck结构中增加多条不同尺度的并行卷积支路,在保留原有特征信息的同时融合多尺度的特征信息,增强模型的全局感知能力。在VisDrone2019、COCO2017和PASCAL VOC2012数据集上对提出的EM-YOLOv5s模型进行测试。实验结果表明,与YOLOv5s模型相比,mAP@0.5∶0.95、mAP@0.5等关键指标均有一定提升,在PASCAL VOC2012上,mAP@0.5∶0.95提升5.2%,而检测时间仅增加1.9ms,说明EM-YOLOv5模型能够有效地提升通用复杂场景下的目标检测精度。
中图分类号:
惠康华, 杨卫, 刘浩翰, 张智, 郑锦, 百晓. 基于YOLOv5的增强多尺度目标检测方法[J]. 兵工学报, 2023, 44(9): 2600-2610.
HUI Kanghua, YANG Wei, LIU Haohan, ZHANG Zhi, ZHENG Jin, BAI Xiao. Enhanced Multi-scale Target Detection Method Based on YOLOv5[J]. Acta Armamentarii, 2023, 44(9): 2600-2610.

图1 增强多尺度YOLOv5s网络结构
Fig.1 EM-YOLOv5s network structure

图2 初始锚框设定
Fig.2 Initial anchor box setting

图3 Conv结构
Fig.3 Conv structure

图4 Bottleneck结构
Fig.4 Bottleneck structure

图5 C3结构
Fig.5 C3 structure
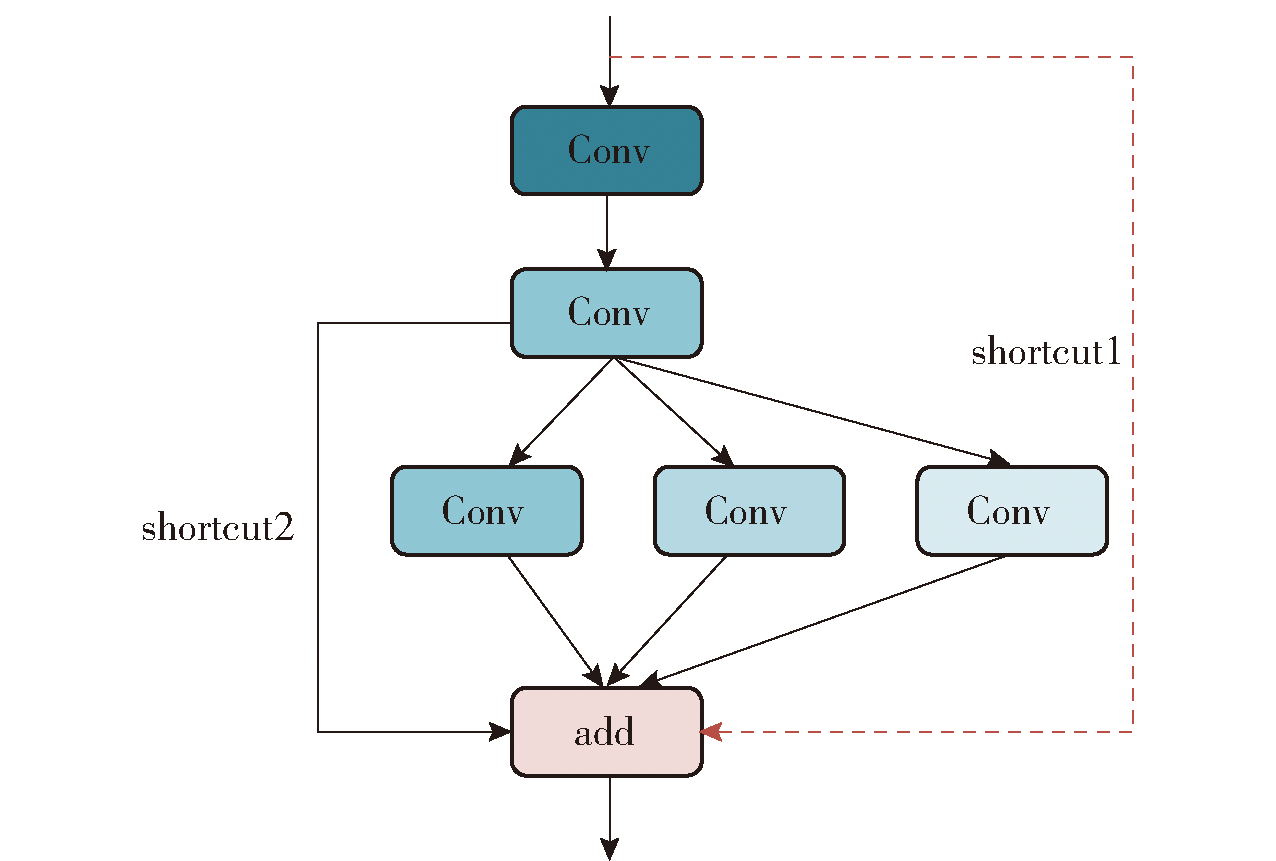
图6 增强多尺度Bottleneck结构
Fig.6 EM-Bottleneck structure

图7 EM-C3结构
Fig.7 EM-C3 structure
| 锚框算法 | 数据集 | 召回 率/% | mAP (0.5)/% | mAP 0.5∶0.95/% |
|---|---|---|---|---|
| Kmeans | VOC2012 | 78.8 | 84.1 | 60.4 |
| Kmeans++ | VOC2012 | 79.8 | 84.7 | 60.8 |
| GMM | VOC2012 | 79.6 | 84.8 | 61.0 |
| Agglomerative | VOC2012 | 76.6 | 83.8 | 58.7 |
| Kmeans | COCO | 51.7 | 57.2 | 37.8 |
| Kmeans++ | COCO | 52.7 | 57.4 | 38.1 |
| GMM | COCO | 50.2 | 54.3 | 34.6 |
| Agglomerative | COCO | 50.8 | 55.6 | 35.4 |
| Kmeans | VisDrone | 33.5 | 34.5 | 18.8 |
| Kmeans++ | VisDrone | 35 | 35.4 | 19.4 |
| GMM | VisDrone | 32.6 | 33.8 | 16.6 |
| Agglomerative | VisDrone | 33.2 | 34.1 | 17.2 |
表1 初始锚框对比
Table 1 Initial anchor comparison
| 锚框算法 | 数据集 | 召回 率/% | mAP (0.5)/% | mAP 0.5∶0.95/% |
|---|---|---|---|---|
| Kmeans | VOC2012 | 78.8 | 84.1 | 60.4 |
| Kmeans++ | VOC2012 | 79.8 | 84.7 | 60.8 |
| GMM | VOC2012 | 79.6 | 84.8 | 61.0 |
| Agglomerative | VOC2012 | 76.6 | 83.8 | 58.7 |
| Kmeans | COCO | 51.7 | 57.2 | 37.8 |
| Kmeans++ | COCO | 52.7 | 57.4 | 38.1 |
| GMM | COCO | 50.2 | 54.3 | 34.6 |
| Agglomerative | COCO | 50.8 | 55.6 | 35.4 |
| Kmeans | VisDrone | 33.5 | 34.5 | 18.8 |
| Kmeans++ | VisDrone | 35 | 35.4 | 19.4 |
| GMM | VisDrone | 32.6 | 33.8 | 16.6 |
| Agglomerative | VisDrone | 33.2 | 34.1 | 17.2 |

图8 4种算法在VOC数据集上的聚类结果
Fig.8 Clustering results of four algorithms on VOC datasets
| 结构 | 数据集 | 召回 率/% | mAP@ 0.5/% | mAP@ 0.5∶0.95/% | 参数 量 |
|---|---|---|---|---|---|
| C3 | VOC2012 | 78.8 | 84.1 | 60.4 | 7.0 |
| C3 | VisDrone | 33.5 | 34.5 | 18.8 | 7.0 |
| EM-C3 | VOC2012 | 79.9 | 85.7 | 65.4 | 8.4 |
| EM-C3 | VisDrone | 35.2 | 35.8 | 20.4 | 8.4 |
表2 EM-C3与C3结构在不同数据集上对比结果
Table 2 Comparison results of EM-C3 and C3 structures
| 结构 | 数据集 | 召回 率/% | mAP@ 0.5/% | mAP@ 0.5∶0.95/% | 参数 量 |
|---|---|---|---|---|---|
| C3 | VOC2012 | 78.8 | 84.1 | 60.4 | 7.0 |
| C3 | VisDrone | 33.5 | 34.5 | 18.8 | 7.0 |
| EM-C3 | VOC2012 | 79.9 | 85.7 | 65.4 | 8.4 |
| EM-C3 | VisDrone | 35.2 | 35.8 | 20.4 | 8.4 |

图9 模型检测热力图效果对比
Fig.9 Comparison of thermogram effects of model detection
| 模型 | 召回 率/% | mAP @0.5/% | mAP@ 0.5∶0.95/% | 参数 量/M |
|---|---|---|---|---|
| YOLOv5s | 78.8 | 84.1 | 60.4 | 7.0 |
| YOLOv5m | 82.0 | 87.6 | 67.1 | 20.9 |
| YOLOv5l | 85.1 | 89.1 | 69.3 | 46.2 |
| YOLOv5s-EM_C3 | 79.9 | 85.7 | 65.4 | 8.4 |
| YOLOv5m-EM_C3 | 84.2 | 88.3 | 69.2 | 24.2 |
| YOLOv5l-EM_C3 | 85.5 | 89.3 | 70.6 | 52.1 |
表3 EM-C3与C3结构在不同规模模型上对比结果
Table 3 Comparison results of EM-C3 and C3 structures
| 模型 | 召回 率/% | mAP @0.5/% | mAP@ 0.5∶0.95/% | 参数 量/M |
|---|---|---|---|---|
| YOLOv5s | 78.8 | 84.1 | 60.4 | 7.0 |
| YOLOv5m | 82.0 | 87.6 | 67.1 | 20.9 |
| YOLOv5l | 85.1 | 89.1 | 69.3 | 46.2 |
| YOLOv5s-EM_C3 | 79.9 | 85.7 | 65.4 | 8.4 |
| YOLOv5m-EM_C3 | 84.2 | 88.3 | 69.2 | 24.2 |
| YOLOv5l-EM_C3 | 85.5 | 89.3 | 70.6 | 52.1 |

图10 Loss对比图
Fig.10 Loss comparison

图11 不同规模模型检测性能对比图
Fig.11 Comparison of detection performance of models with different scales

图12 模型检测效果对比
Fig.12 Comparison of model detection effects
| 模型 | 输入尺寸 | mAP@0.5/% | mAP@0.5∶0.95/% | P/% | R/% | 推理时间/ms | 参数量/M |
|---|---|---|---|---|---|---|---|
| YOLOv5s-efficientNetv2 | 640 | 80.3 | 54.2 | 80.2 | 74.4 | 4.7 | 8.2 |
| YOLOv5-GhostNet | 640 | 81.6 | 57.3 | 80.7 | 76.3 | 3.6 | 6.3 |
| YOLOv3 | 640 | 88.0 | 67.5 | 83.7 | 84.5 | 16.9 | 61.6 |
| YOLOv3-spp | 640 | 88.6 | 68.9 | 85.4 | 82.8 | 17.2 | 62.7 |
| YOLOv3-tiny | 640 | 63.7 | 31.6 | 62.8 | 62.3 | 2.9 | 8.7 |
| SSD | 640 | 71.7 | 42.3 | — | — | — | 200 |
| Faster RCNN | 640 | 79.1 | 51.3 | — | — | — | 460 |
| YOLOv5s | 640 | 84.1 | 60.4 | 82.1 | 78.8 | 4 | 7.0 |
| YOLOv5m | 640 | 87.6 | 67.1 | 84.4 | 82.0 | 6.5 | 20.9 |
| YOLOv5l | 640 | 89.1 | 69.3 | 84.1 | 85.1 | 9.9 | 46.2 |
| EM-YOLOv5s | 640 | 86.6 | 65.6 | 84.3 | 80.4 | 5.9 | 8.4 |
| EM-YOLOv5m | 640 | 88.7 | 69.7 | 83.4 | 84.7 | 14 | 24.2 |
| EM-YOLOv5l | 640 | 89.3 | 71.7 | 84.2 | 85.7 | 29.6 | 52.1 |
表4 EM-YOLOv5与主流检测模型对比实验
Table 4 Comparative experiment between EM-YOLOv5 and mainstream detection models
| 模型 | 输入尺寸 | mAP@0.5/% | mAP@0.5∶0.95/% | P/% | R/% | 推理时间/ms | 参数量/M |
|---|---|---|---|---|---|---|---|
| YOLOv5s-efficientNetv2 | 640 | 80.3 | 54.2 | 80.2 | 74.4 | 4.7 | 8.2 |
| YOLOv5-GhostNet | 640 | 81.6 | 57.3 | 80.7 | 76.3 | 3.6 | 6.3 |
| YOLOv3 | 640 | 88.0 | 67.5 | 83.7 | 84.5 | 16.9 | 61.6 |
| YOLOv3-spp | 640 | 88.6 | 68.9 | 85.4 | 82.8 | 17.2 | 62.7 |
| YOLOv3-tiny | 640 | 63.7 | 31.6 | 62.8 | 62.3 | 2.9 | 8.7 |
| SSD | 640 | 71.7 | 42.3 | — | — | — | 200 |
| Faster RCNN | 640 | 79.1 | 51.3 | — | — | — | 460 |
| YOLOv5s | 640 | 84.1 | 60.4 | 82.1 | 78.8 | 4 | 7.0 |
| YOLOv5m | 640 | 87.6 | 67.1 | 84.4 | 82.0 | 6.5 | 20.9 |
| YOLOv5l | 640 | 89.1 | 69.3 | 84.1 | 85.1 | 9.9 | 46.2 |
| EM-YOLOv5s | 640 | 86.6 | 65.6 | 84.3 | 80.4 | 5.9 | 8.4 |
| EM-YOLOv5m | 640 | 88.7 | 69.7 | 83.4 | 84.7 | 14 | 24.2 |
| EM-YOLOv5l | 640 | 89.3 | 71.7 | 84.2 | 85.7 | 29.6 | 52.1 |
| [1] |
杨传栋, 钱立志, 薛松, 等. 图像自寻的弹药目标检测方法综述[J]. 兵工学报, 2022, 43(10): 2687-2704.
|
|
doi: 10.12382/bgxb.2021.0610 |
|
| [2] |
龚诗雄, 王旭, 孔国杰, 等. 多车协同目标跟踪方法[J]. 兵工学报, 2022, 43(10): 2429-2442.
|
|
doi: 10.12382/bgxb.2021.0462 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
doi: 10.1145/3065386 URL |
| [7] |
|
| [8] |
doi: 10.1109/TPAMI.2015.2389824 pmid: 26353135 |
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
王千, 王成, 冯振元, 等. K-means聚类算法研究综述[J]. 电子设计工程, 2012, 20(7): 21-24.
|
|
|
|
| [22] |
伍育红. 聚类算法综述[J]. 计算机科学, 2015, 42(增刊6):491-499.
|
|
|
|
| [23] |
张达为, 刘绪崇, 周维, 等. 基于改进YOLOv3的实时交通标志检测算法[J]. 计算机应用, 2022, 42(7): 2219-2226.
doi: 10.11772/j.issn.1001-9081.2021050731 |
|
doi: 10.11772/j.issn.1001-9081.2021050731 |
|
| [24] |
蒋镕圻, 彭月平, 谢文宣, 等. 嵌入scSE模块的改进YOLOv4小目标检测算法[J]. 图学学报, 2021, 42(4): 546-555.
|
|
|
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
doi: 10.1007/s11263-014-0733-5 URL |
| [29] |
|
| [30] |
|
| [31] |
doi: 10.1007/BF01890115 URL |
| [32] |
|
| [33] |
|
| [34] |
|
| [1] | 宋晓茹, 刘康, 高嵩, 陈超波, 阎坤. 复杂战场环境下改进YOLOv5军事目标识别算法研究[J]. 兵工学报, 2024, 45(3): 934-947. |
| [2] | 熊光明, 罗震, 孙冬, 陶俊峰, 唐泽月, 吴超. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3): 893-906. |
| [3] | 秦昊林, 许廷发, 李佳男. 基于超像素注意力和孪生结构的半监督高光谱显著性目标检测[J]. 兵工学报, 2023, 44(9): 2639-2649. |
| [4] | 赵晓冬, 张洵颖. 基于YOLOv5的无人车自主目标识别优化算法[J]. 兵工学报, 2023, 44(9): 2732-2744. |
| [5] | 周宇, 曹荣刚, 栗苹, 马啸. 一种用于外场试验图像的引信炸点检测方法[J]. 兵工学报, 2023, 44(8): 2453-2464. |
| [6] | 王学敏, 于洪波, 张翔宇, 安舒, 李文海. 基于Hough变换检测前跟踪的水下多目标被动检测方法[J]. 兵工学报, 2023, 44(7): 2114-2121. |
| [7] | 柳嵩, 姚直象, 陆代强, 袁骏. 一种基于被动声呐宽带空间谱的自动检测算法[J]. 兵工学报, 2023, 44(6): 1764-1774. |
| [8] | 王检, 张邦宁, 张洁, 魏国峰, 郭道省. 基于多域特征融合的通信辐射源个体识别方法[J]. 兵工学报, 2023, 44(4): 949-959. |
| [9] | 马鹏阁, 魏宏光, 孙俊灵, 陶然, 庞栋栋, 单涛, 蔡志勇, 刘兆瑜. 基于高斯-拉普拉斯滤波的增强局部对比度红外小目标检测算法[J]. 兵工学报, 2023, 44(4): 1041-1049. |
| [10] | 孙强, 张伽伟, 喻鹏. 基于海洋浮标的电场干扰特性分析及信号检测方法[J]. 兵工学报, 2023, 44(3): 857-864. |
| [11] | 郭永红, 牛海涛, 史超, 郭铖. 基于卷积和注意力机制的小样本目标检测[J]. 兵工学报, 2023, 44(11): 3508-3515. |
| [12] | 丁伯圣, 张睿恒, 徐立新, 陈慧敏. 基于灰度补偿和特征融合的沙尘图像修复方法[J]. 兵工学报, 2023, 44(10): 3115-3126. |
| [13] | 王强, 吴乐天, 李红, 王勇, 王欢, 杨万扣. 基于双支网络协作的红外弱小目标检测[J]. 兵工学报, 2023, 44(10): 3165-3176. |
| [14] | 李博, 王博, 韩京冶, 杨宗睿, 栗霖雲, 傅畅之. 基于车载计算机的红外图像移动目标检测[J]. 兵工学报, 2022, 43(S1): 66-73. |
| [15] | 严继伟, 苏娟, 李义红. 基于[KG-*9]Ghost卷积与注意力机制的SAR图像建筑物检测算法[J]. 兵工学报, 2022, 43(7): 1667-1675. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4