
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (2): 240265-.doi: 10.12382/bgxb.2024.0265
李宗刚1,2,*( ), 韩森1,2, 陈引娟1,2, 宁小刚1,2
), 韩森1,2, 陈引娟1,2, 宁小刚1,2
收稿日期:2024-04-09
上线日期:2025-02-28
通讯作者:
基金资助:
LI Zonggang1,2,*(), HAN Sen1,2, CHEN Yinjuan1,2, NING Xiaogang1,2
Received:2024-04-09
Online:2025-02-28
摘要:
针对深度Q网络(Deep Q Network,DQN)算法在求解路径规划问题时存在学习时间长、收敛速度慢的局限性,提出一种角度搜索(Angle Searching,AS)和DQN相结合的算法(Angle Searching-Deep Q Network,AS-DQN),通过规划搜索域,控制移动机器人的搜索方向,减少栅格节点的遍历,提高路径规划的效率。为加强移动机器人之间的协作能力,提出一种物联网信息融合技术(Internet Information Fusion Technology,IIFT)模型,能够将多个分散的局部环境信息整合为全局信息,指导移动机器人规划路径。仿真实验结果表明:与标准DQN算法相比,AS-DQN算法可以缩短移动机器人寻得到达目标点最优路径的时间,将IIFT模型与AS-DQN算法相结合路径规划效率更加显著。实体实验结果表明:AS-DQN算法能够应用于Turtlebot3无人车,并成功找到起点至目标点的最优路径。
中图分类号:
李宗刚, 韩森, 陈引娟, 宁小刚. 基于角度搜索和深度Q网络的移动机器人路径规划算法[J]. 兵工学报, 2025, 46(2): 240265-.
LI Zonggang, HAN Sen, CHEN Yinjuan, NING Xiaogang. A Path Planning Algorithm for Mobile Robots Based on Angle Searching and Deep Q-Network[J]. Acta Armamentarii, 2025, 46(2): 240265-.

图1 MRC-OPP模型及转化地图
Fig.1 MRC-OPP model and transform map

图2 物联网信息融合技术模型示意图
Fig.2 Schematic diagram of IIFT model
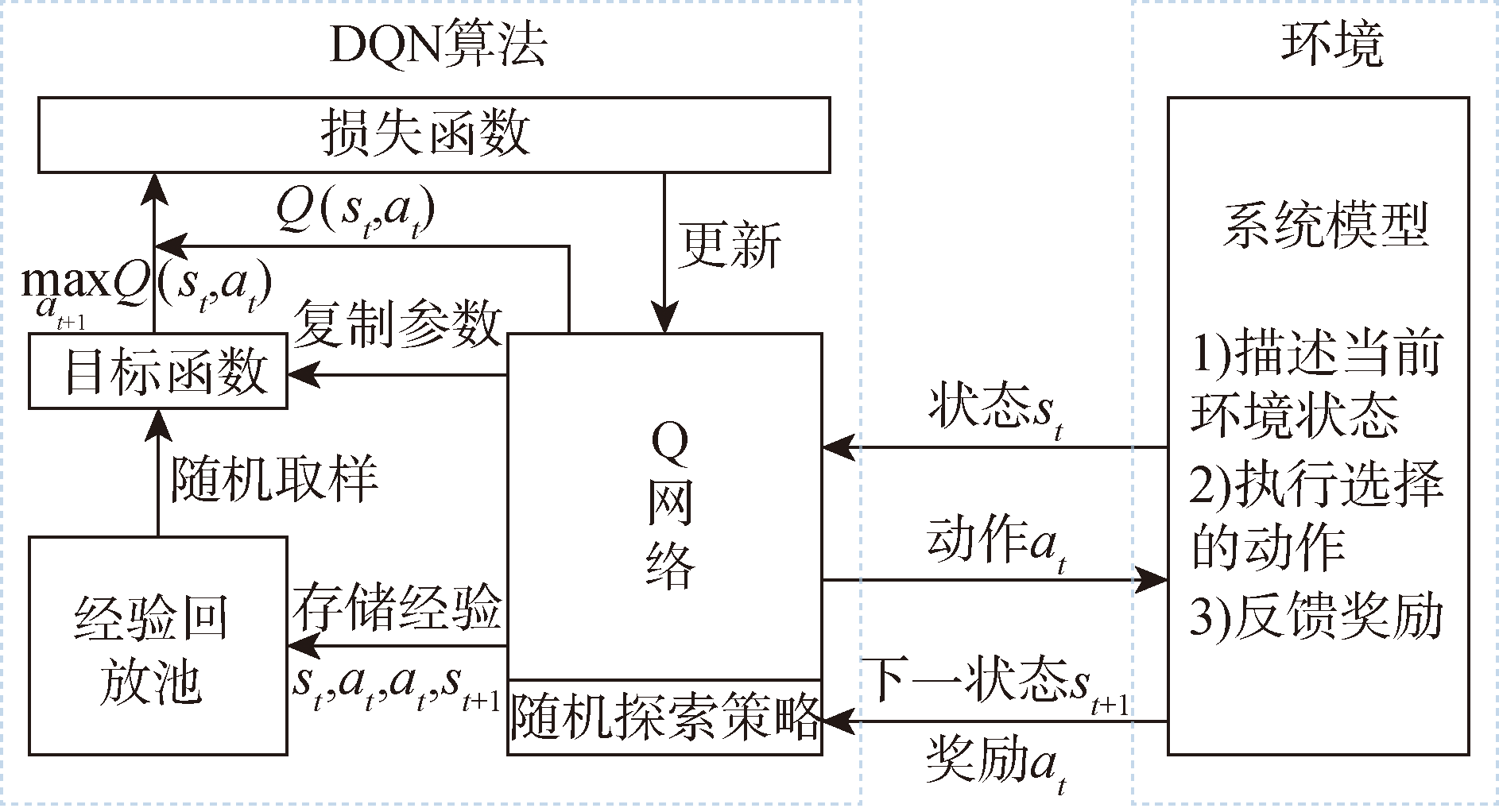
图3 DQN算法结构示意图
Fig.3 Schematic diagram of DQN algorithm structure

图4 位置关系及搜索域示意图
Fig.4 Positional relationship and search area diagram

图5 改进搜索域示意图
Fig.5 Improved search domain

图6 四个数值矩阵构成的观测空间
Fig.6 Observation space formed by four numerical matrices

图7 移动机器人可选栅格点
Fig.7 Optional grid points for mobile robot

图8 神经网络结构图
Fig.8 Neural network structure diagram
| Algorithm 1 AS-DQN: |
|---|
| Initialization Initialize replay memory,Initialize the Q network and target network and other hyperparameters.Initialize S=0. |
| 1: for S<Smax do |
| 2: if S≠0 then sk=sk+1 |
| 3: else get the initial observation sk |
| 4: end if |
| 5: if S<pre.step then |
| 6: random select action ak |
| 7: else |
| 8: if μ<$ \epsilon $ then random select action ak |
| 9: else select ak= Q(sk,a,θ) |
| 10: end if |
| 11: end if |
| 12: if coordinate.ak=FALSE |
| 13: brake |
| 14: Store experience ek=(sk,ak,rk,sk+1) |
| 15: if S<decline.step then |
| 16: $ \epsilon = \epsilon +0.002$ |
| 17: end if |
| 18: if S>pre.step then |
| 19: Calculate the loss (y-Q(si,ai;θi))2 |
| 20: Train and update Q network’s weight θi |
| 21: Every Z steps copy θi to θi+1 |
| 22: end if |
| 23: end for |
表1 AS-DQN伪代码
Table 1 AS-DQN pseudocode
| Algorithm 1 AS-DQN: |
|---|
| Initialization Initialize replay memory,Initialize the Q network and target network and other hyperparameters.Initialize S=0. |
| 1: for S<Smax do |
| 2: if S≠0 then sk=sk+1 |
| 3: else get the initial observation sk |
| 4: end if |
| 5: if S<pre.step then |
| 6: random select action ak |
| 7: else |
| 8: if μ<$ \epsilon $ then random select action ak |
| 9: else select ak= Q(sk,a,θ) |
| 10: end if |
| 11: end if |
| 12: if coordinate.ak=FALSE |
| 13: brake |
| 14: Store experience ek=(sk,ak,rk,sk+1) |
| 15: if S<decline.step then |
| 16: $ \epsilon = \epsilon +0.002$ |
| 17: end if |
| 18: if S>pre.step then |
| 19: Calculate the loss (y-Q(si,ai;θi))2 |
| 20: Train and update Q network’s weight θi |
| 21: Every Z steps copy θi to θi+1 |
| 22: end if |
| 23: end for |

图9 AS-DQN训练结构图
Fig.9 AS-DQN training structure diagram
| 参数名称 | 数值 |
|---|---|
| 记忆池 | 20000 |
| 开始训练的经验数量 | 100 |
| 处理样本数量 | 32 |
| 目标网络更新频率 | 100 |
| 折扣因子γ | 0.9 |
| 学习率 | 0.001 |
| 经验回放内存值 | 500 |
| 选择最大Q值动作的概率ε | 0.01 |
| ε最大值 | 1 |
| ε增加速率 | 0.002 |
表2 神经网络的超参及数值
Table 2 Hyperparameters and numerical values of neural network
| 参数名称 | 数值 |
|---|---|
| 记忆池 | 20000 |
| 开始训练的经验数量 | 100 |
| 处理样本数量 | 32 |
| 目标网络更新频率 | 100 |
| 折扣因子γ | 0.9 |
| 学习率 | 0.001 |
| 经验回放内存值 | 500 |
| 选择最大Q值动作的概率ε | 0.01 |
| ε最大值 | 1 |
| ε增加速率 | 0.002 |

图10 地图障碍物模型示意图
Fig.10 Schematic diagram of map obstacles model

图11 训练过程损失值变化示意图
Fig.11 Schematic diagram of changes in loss values during training

图12 8×8地图路径规划示意图
Fig.12 Schematic diagram of path planning of 8×8 map

图13 12×12地图路径规划示意图
Fig.13 Schematic diagram of path planning of 12×12 map

图14 8×8地图损失值变化示意图
Fig.14 Schematic diagram of changes in loss values of 8×8 map
| 机器人 | 收敛步长 | 收敛时间/s |
|---|---|---|
| R1 | 28000 | 372.9 |
| R2 | 30000 | 446.5 |
| R3 | 17000 | 258.6 |
表3 8×8地图移动机器人数据
Table 3 Mobile robot data of 8×8map
| 机器人 | 收敛步长 | 收敛时间/s |
|---|---|---|
| R1 | 28000 | 372.9 |
| R2 | 30000 | 446.5 |
| R3 | 17000 | 258.6 |

图15 12×12地图损失值变化示意图
Fig.15 Schematic diagram of changes in loss values of 12×12map
| 机器人 | 收敛步长 | 收敛时间/s |
|---|---|---|
| R4 | 109000 | 1510.6 |
| R5 | 103000 | 1429.8 |
| R6 | 75000 | 1137.2 |
表4 12×12地图移动机器人数据
Table 4 Mobile robot data of 12×12map
| 机器人 | 收敛步长 | 收敛时间/s |
|---|---|---|
| R4 | 109000 | 1510.6 |
| R5 | 103000 | 1429.8 |
| R6 | 75000 | 1137.2 |

图16 训练过程损失值变化示意图
Fig.16 Diagram of changes in loss values during training
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 27000 | 368.5 | 20.68 |
| AS-DQN | 20500 | 292.3 |
表5 8×8地图静态障碍物模型数据
Table 5 Model data of static obstacle of 8×8map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 27000 | 368.5 | 20.68 |
| AS-DQN | 20500 | 292.3 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 28000 | 398.1 | 23.99 |
| AS-DQN | 20000 | 302.6 |
表6 8×8地图动态障碍物模型数据
Table 6 Model data of dynamic obstacle of 8×8map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 28000 | 398.1 | 23.99 |
| AS-DQN | 20000 | 302.6 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 90000 | 1216.9 | 15.75 |
| AS-DQN | 75000 | 1025.3 |
表7 12×12地图静态障碍物模型数据
Table 7 Model data of static obstacle of 12×12map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 90000 | 1216.9 | 15.75 |
| AS-DQN | 75000 | 1025.3 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 109000 | 1510.6 | 16.54 |
| AS-DQN | 85500 | 1260.7 |
表8 12×12地图动态障碍物模型数据
Table 8 Model data of dynamic obstacle of 12×12map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 109000 | 1510.6 | 16.54 |
| AS-DQN | 85500 | 1260.7 |

图17 训练过程损失值变化示意图
Fig.17 Schematic diagram of changes in loss values during training
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% | |||
|---|---|---|---|---|---|---|
| DQN | 27000 | 368.5 | ||||
| AS-DQN | 20500 | 292.3 | 53.92 | |||
| AS-DQN(IIFT) | 12000 | 169.8 | 41.91 | |||
表9 8×8地图静态障碍物模型数据
Table 9 Model data of static obstacle of 8×8map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% | |||
|---|---|---|---|---|---|---|
| DQN | 27000 | 368.5 | ||||
| AS-DQN | 20500 | 292.3 | 53.92 | |||
| AS-DQN(IIFT) | 12000 | 169.8 | 41.91 | |||
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 28000 | 398.1 | |
| AS-DQN | 20000 | 302.6 | 52.65 |
| AS-DQN(IIFT) | 12500 | 188.5 | 37.71 |
表10 8×8地图动态障碍物模型数据
Table 10 Model data of dynamic obstacle of 8×8map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 28000 | 398.1 | |
| AS-DQN | 20000 | 302.6 | 52.65 |
| AS-DQN(IIFT) | 12500 | 188.5 | 37.71 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 90000 | 1216.9 | |
| AS-DQN | 75000 | 1025.3 | 40.33 |
| AS-DQN(IIFT) | 56000 | 726.1 | 29.18 |
表11 12×12地图静态障碍物模型数据
Table 11 Model data of static obstacle of 12×12map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 90000 | 1216.9 | |
| AS-DQN | 75000 | 1025.3 | 40.33 |
| AS-DQN(IIFT) | 56000 | 726.1 | 29.18 |
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 109000 | 1510.6 | |
| AS-DQN | 85500 | 1260.7 | 35.54 |
| AS-DQN(IIFT) | 65000 | 973.8 | 22.76 |
表12 12×12地图动态障碍物模型数据
Table 12 Model data of dynamic obstacle of 12×12 map
| 算法 | 收敛步长 | 收敛时间/s | 节省时间/% |
|---|---|---|---|
| DQN | 109000 | 1510.6 | |
| AS-DQN | 85500 | 1260.7 | 35.54 |
| AS-DQN(IIFT) | 65000 | 973.8 | 22.76 |

图18 实体图片
Fig.18 Physical images

图19 刚体和NOKOV动捕系统示意图
Fig.19 Schematic diagram of rigid body and NOKOV dynamic capture system

图20 TB3无人车路径规划过程示意图
Fig.20 Schematic diagram of TB3 unmanned vehicle path planning process

图21 Rviz中TB3路径规划示意图
Fig.21 Path planning of TB3 on Rviz
| [1] |
王旭, 朱其新, 朱永红, 等. 面向二维移动机器人的路径规划算法综述[J]. 计算机工程与应用, 2023, 59(20):51-66.
doi: 10.3778/j.issn.1002-8331.2212-0050 |
|
doi: 10.3778/j.issn.1002-8331.2212-0050 |
|
| [2] |
毛建旭, 贺振宇. 电力巡检机器人路径规划技术及应用综述[J]. 控制与决策, 2023, 38(11):3009-3024.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
郭利进, 李强. 基于改进RRT*算法的移动机器人路径规划[J]. 智能系统学报, 2024, 19(05):1209-1217.
|
|
|
|
| [12] |
|
| [13] |
梅艺林, 崔立堃, 胡雪岩. 基于人工势场法的无人车路径规划与避障研究[J]. 兵器装备工程学报, 2024, 45(09):300-306.
|
|
|
|
| [14] |
吴妮妮, 王岫鑫. 移动机器人导航路径的自主学习粒子群规划方法[J]. 机械设计与制造, 2024(7):342-346.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
doi: 10.1109/ACCESS.2019.2918703 |
| [22] |
|
| [23] |
|
| [24] |
史殿习, 彭滢璇, 杨焕焕, 等. 基于DQN的多智能体深度强化学习运动规划方法[J]. 计算机科学, 2024, 51(2):268-277.
|
|
doi: 10.11896/jsjkx.230500113 |
|
| [25] |
|
| [26] |
|
| [27] |
王雅如, 姚得鑫, 刘增力, 等. 基于角度搜索的移动机器人路径规划方法[J]. 系统仿真学报, 2024, 36(7):1643-1654.
doi: 10.16182/j.issn1004731x.joss.23-0407 |
|
doi: 10.16182/j.issn1004731x.joss.23-0407 |
|
| [28] |
|
| [1] | 胡明哲, 李旭光, 任智颖, 曾帅. 基于改进启发函数的A*算法的无人机三维路径规划[J]. 兵工学报, 2024, 45(S1): 302-307. |
| [2] | 牛奕龙, 杨仪, 张凯, 穆莹, 王奇, 王英民. 基于改进DQN算法的应召搜潜无人水面艇路径规划方法[J]. 兵工学报, 2024, 45(9): 3204-3215. |
| [3] | 姬鹏, 郭明皓. 基于Frenet坐标下改进人工势场法的无人车局部路径规划[J]. 兵工学报, 2024, 45(7): 2097-2109. |
| [4] | 田洪清, 马明涛, 张博, 郑讯佳. 越野环境下势场搜索树智能车辆路径规划方法[J]. 兵工学报, 2024, 45(7): 2110-2127. |
| [5] | 王霄龙, 陈洋, 胡棉, 李旭东. 基于改进深度Q网络的机器人持续监测路径规划[J]. 兵工学报, 2024, 45(6): 1813-1823. |
| [6] | 潘作栋, 周悦, 郭威, 徐高飞, 孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128. |
| [7] | 董明泽, 温庄磊, 陈锡爱, 杨炅坤, 曾涛. 安全凸空间与深度强化学习结合的机器人导航方法[J]. 兵工学报, 2024, 45(12): 4372-4382. |
| [8] | 孙鹏耀, 黄炎焱, 王凯生. 基于势场增强烟花算法的二维全局路径规划[J]. 兵工学报, 2024, 45(10): 3499-3518. |
| [9] | 李松, 麻壮壮, 张蕴霖, 邵晋梁. 基于安全强化学习的多智能体覆盖路径规划[J]. 兵工学报, 2023, 44(S2): 101-113. |
| [10] | 鞠爽, 王晶, 王灏, 周萌. 基于GWO-WOA的执行器严重故障多移动机器人编队重构控制[J]. 兵工学报, 2023, 44(S2): 114-125. |
| [11] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [12] | 苏波, 江磊, 刘宇飞, 邢伯阳, 李泳耀, 谭森起, 王志瑞. 移动机器人跨域跃质关键技术综述[J]. 兵工学报, 2023, 44(9): 2556-2567. |
| [13] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [14] | 尚哲, 王挺, 徐瑶, 吴英彪, 邵沛瑶, 邵士亮. 六轮摇臂移动机器人结构设计与越障动力学研究[J]. 兵工学报, 2023, 44(11): 3478-3488. |
| [15] | 胡致远, 王征, 杨洋, 尹洋. 基于人工鱼群-蚁群算法的UUV三维全局路径规划[J]. 兵工学报, 2022, 43(7): 1676-1684. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4