
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (6): 1761-1775.doi: 10.12382/bgxb.2023.0342
谢馨, 郑杰基**( ), 李宝宇, 于滨, 范大鹏*()
), 李宝宇, 于滨, 范大鹏*()
收稿日期:2023-04-16
上线日期:2024-01-18
通讯作者:
基金资助:
XIE Xin, ZHENG Jieji**(), LI Baoyu, YU Bin, FAN Dapeng*()
Received:2023-04-16
Online:2024-01-18
摘要:
针对武器站俯仰轴伺服传动装置在武器载荷变化时控制精度和安全性下降的问题,提出基于多参数在线辨识的自适应复合控制方法。基于符号函数的线性化方法,构建包含传动间隙、电机和负载摩擦非线性的伺服传动装置待辨识模型框架,推导出待辨识参数的显式迭代方程,通过带遗忘因子的递推增广最小二乘算法实现参数在线辨识。在此基础上,提出自适应比例积分控制器与自适应状态扩张卡尔曼滤波器相结合的复合控制方法。实验结果表明:参数辨识方法可实现伺服传动装置9个关键动力学参数的精确在线辨识,稳态辨识误差不超过10%。自适应复合控制方法将系统速度跟随残差均方根降低了28.24%,有效提升了俯仰轴在武器载荷变化时的控制精度和稳定裕度。
中图分类号:
谢馨, 郑杰基, 李宝宇, 于滨, 范大鹏. 武器站伺服传动装置在线辨识与自适应控制方法[J]. 兵工学报, 2024, 45(6): 1761-1775.
XIE Xin, ZHENG Jieji, LI Baoyu, YU Bin, FAN Dapeng. Online Identification and Adaptive Control Method for Servo Transmission Device in Weapon Station[J]. Acta Armamentarii, 2024, 45(6): 1761-1775.

图1 典型武器站
Fig.1 Typical weapon station
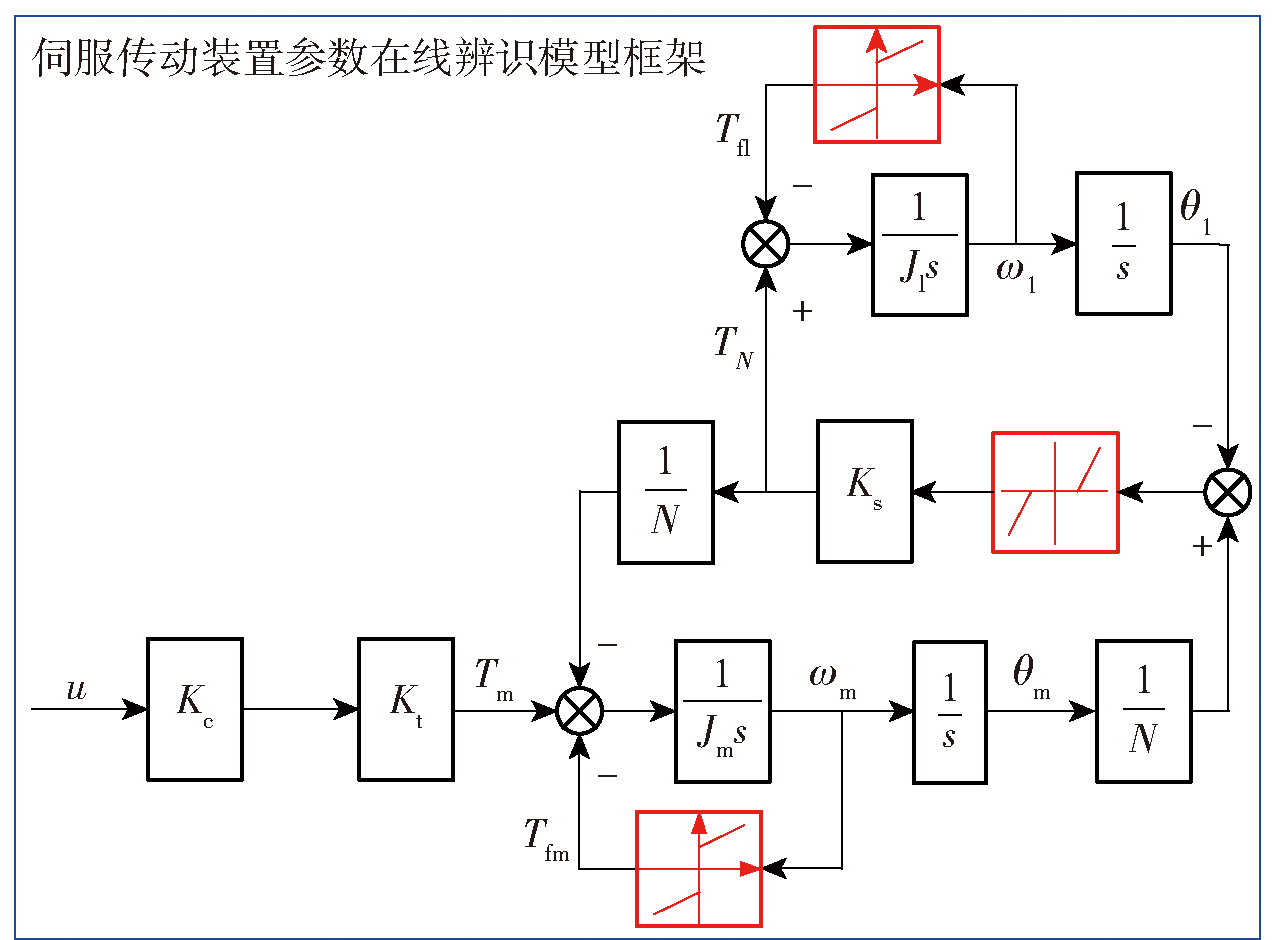
图2 参数在线辨识模型框架
Fig.2 Framework of parameters online identification model

图3 自适应复合控制方法框架
Fig.3 Framework of adaptive composite control method
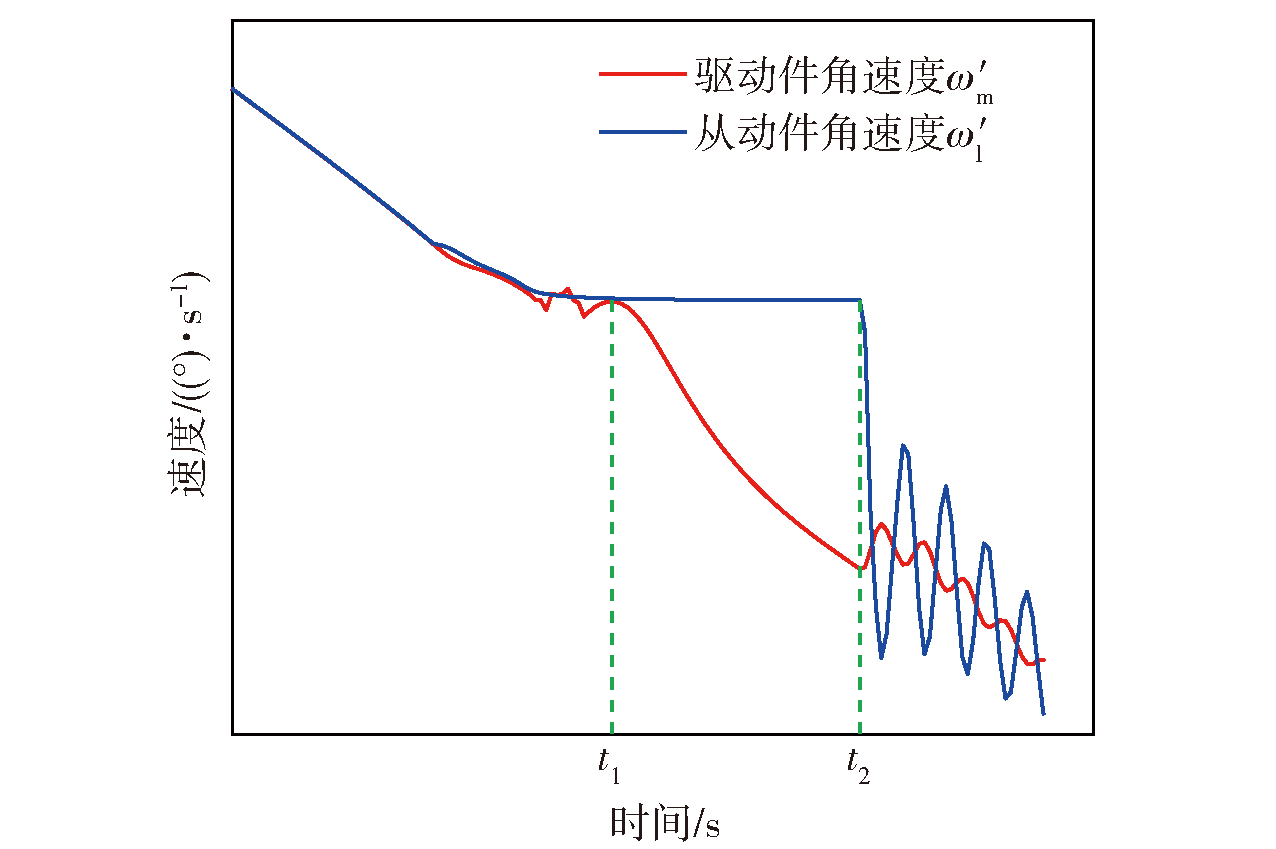
图4 传动间隙反转运动测量法原理
Fig.4 Principle of measurement method for transmission backlash reverse motion
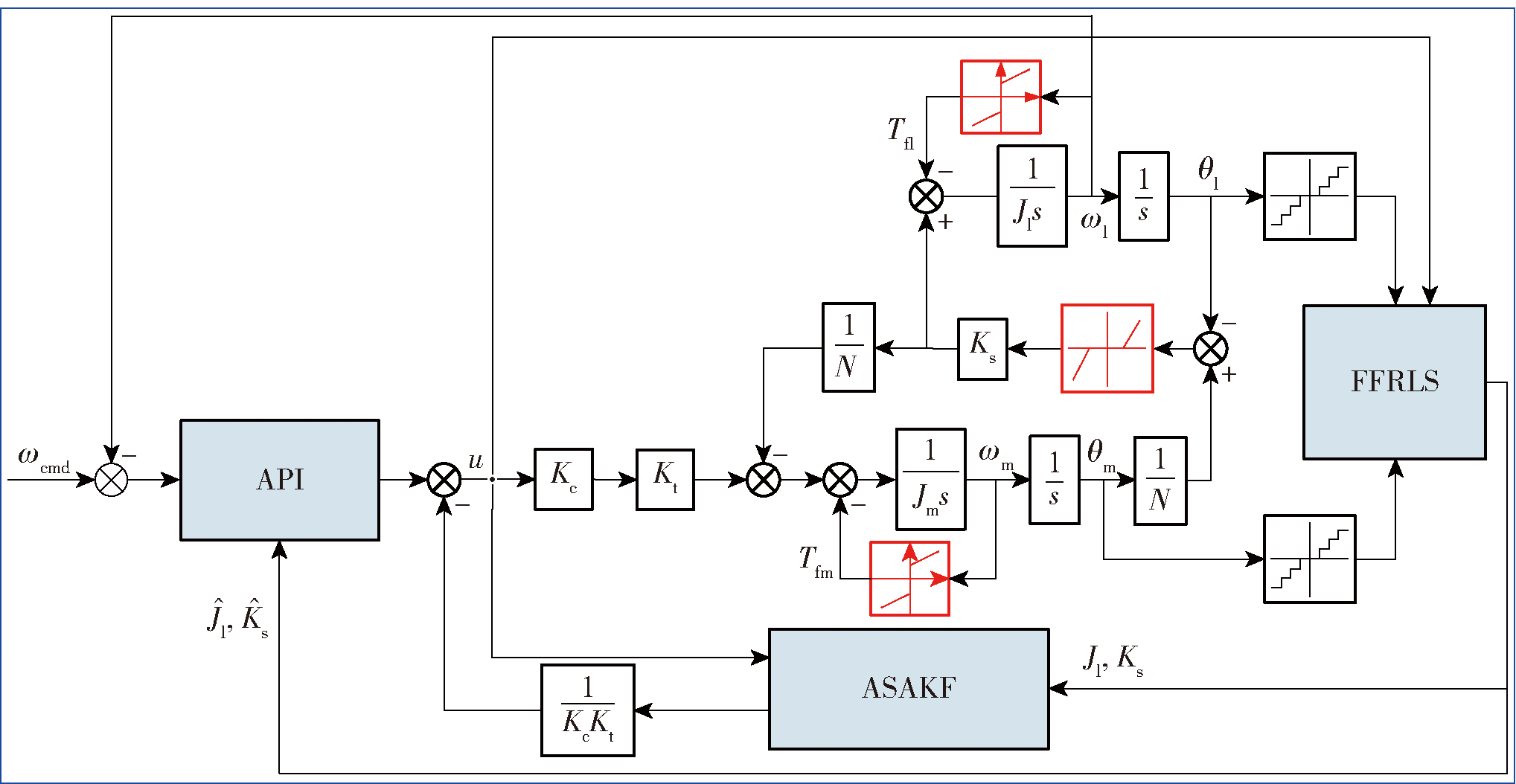
图5 自适应复合控制器框架
Fig.5 Framework of adaptive composite controller
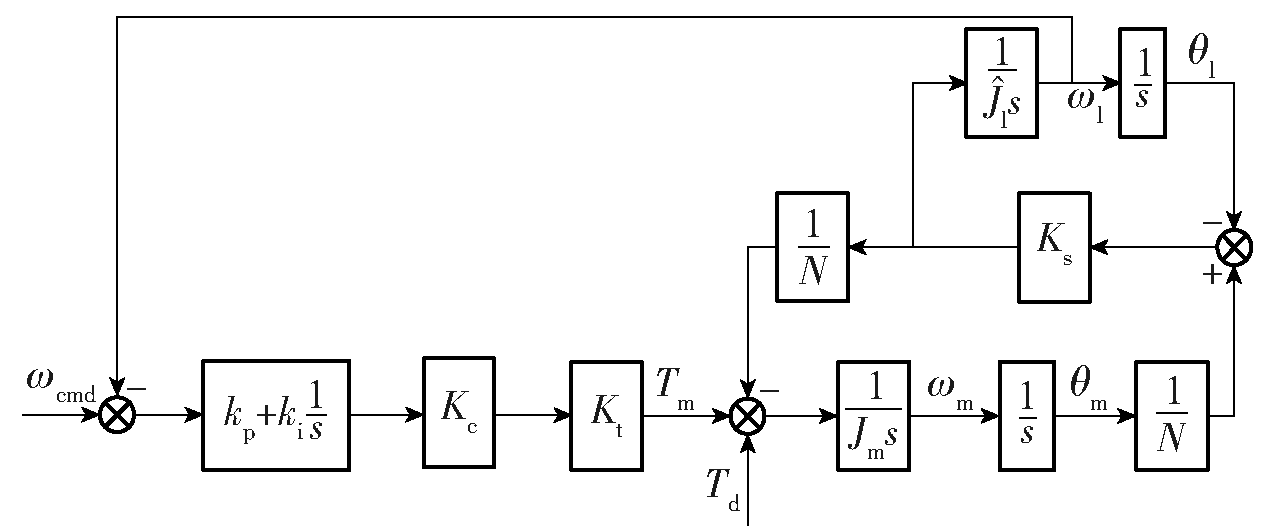
图6 API框架
Fig.6 Framework of adaptive proportional integral controller

图7 伺服传动装置测试平台
Fig.7 Servo transmission device testing platform
| 部件名称 | 型号 | 参数 | 数值 |
|---|---|---|---|
| 额定功率/W | 750 | ||
| 额定转矩/(N·m) | 2.39 | ||
| 永磁同步电机 | ASM80B1007-30M | 额定转速/(r·min-1) | 3000 |
| 转矩常数/ (N·m·A-1) | 0.48 | ||
| 转动惯量/(kg·m2) | 1.14×10-4 | ||
| 驱动器 | YD8000 | 转换系数/(A·V-1) | 0.49 |
| 额定扭矩/(N·m) | 150 | ||
| 联轴器 | GSG-82×68 | 容许转速/(r·min-1) | 4000 |
| 扭转刚度/ (N·m·rad-1) | 168000 | ||
| 转动惯量/(kg·m2) | 2.7×10-4 | ||
| 减速比 | 161 | ||
| 最大输出转矩/(N·m) | 450 | ||
| 精密减速器 | ZKRV-20E-161-B | 最大输出转速/ (r·min-1) | 75 |
| 传动间隙/arcmin | ≤1 | ||
| 传动刚度/ (N·m·rad-1) | 5×105 | ||
| 绝对编码器 | BCE112K50 | 角度分辨率/bit | 19 |
| 惯量盘 | 转动惯量/(kg·m2) | 0.22 | |
| 砝码 | 质量/kg | 5 | |
| 个数 | 12 |
表1 伺服传动装置测试平台的部件型号与参数值
Table 1 Component models and parameter values of servo transmission device testing platform
| 部件名称 | 型号 | 参数 | 数值 |
|---|---|---|---|
| 额定功率/W | 750 | ||
| 额定转矩/(N·m) | 2.39 | ||
| 永磁同步电机 | ASM80B1007-30M | 额定转速/(r·min-1) | 3000 |
| 转矩常数/ (N·m·A-1) | 0.48 | ||
| 转动惯量/(kg·m2) | 1.14×10-4 | ||
| 驱动器 | YD8000 | 转换系数/(A·V-1) | 0.49 |
| 额定扭矩/(N·m) | 150 | ||
| 联轴器 | GSG-82×68 | 容许转速/(r·min-1) | 4000 |
| 扭转刚度/ (N·m·rad-1) | 168000 | ||
| 转动惯量/(kg·m2) | 2.7×10-4 | ||
| 减速比 | 161 | ||
| 最大输出转矩/(N·m) | 450 | ||
| 精密减速器 | ZKRV-20E-161-B | 最大输出转速/ (r·min-1) | 75 |
| 传动间隙/arcmin | ≤1 | ||
| 传动刚度/ (N·m·rad-1) | 5×105 | ||
| 绝对编码器 | BCE112K50 | 角度分辨率/bit | 19 |
| 惯量盘 | 转动惯量/(kg·m2) | 0.22 | |
| 砝码 | 质量/kg | 5 | |
| 个数 | 12 |
| 参数/单位 | 空载 | 带载 |
|---|---|---|
| 负载转动惯量Jl/(kg·m2) | 0.22 | 0.45 |
| 传动刚度Ks/(N·m·rad-1) | 1×106 | 1×106 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 0.005 | 0.005 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 20 | 20 |
| 电机正库伦摩擦力矩 /(N·m) | 0.1 | 0.1 |
| 电机负库伦摩擦力矩 /(N·m) | -0.1 | -0.1 |
| 负载正库伦摩擦力矩 /(N·m) | 5 | 5 |
| 负载负库伦摩擦力矩 /(N·m) | -5 | -5 |
| 传动间隙2θb/arcmin | 1 | 1 |
表2 仿真模型待辨识参数设定值
Table 2 Set values of parameters to be identified in the simulation model
| 参数/单位 | 空载 | 带载 |
|---|---|---|
| 负载转动惯量Jl/(kg·m2) | 0.22 | 0.45 |
| 传动刚度Ks/(N·m·rad-1) | 1×106 | 1×106 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 0.005 | 0.005 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 20 | 20 |
| 电机正库伦摩擦力矩 /(N·m) | 0.1 | 0.1 |
| 电机负库伦摩擦力矩 /(N·m) | -0.1 | -0.1 |
| 负载正库伦摩擦力矩 /(N·m) | 5 | 5 |
| 负载负库伦摩擦力矩 /(N·m) | -5 | -5 |
| 传动间隙2θb/arcmin | 1 | 1 |
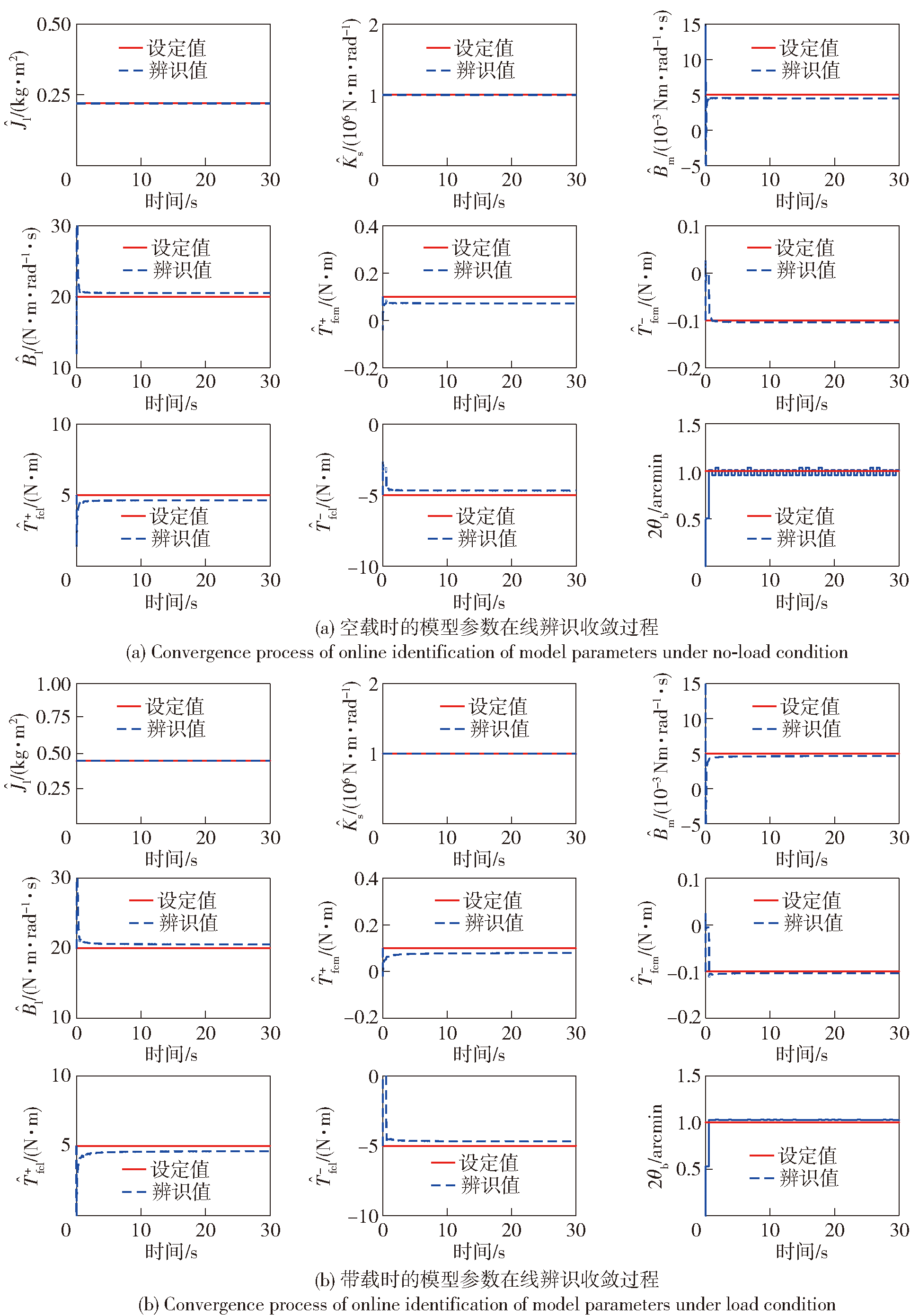
图8 模型参数在线辨识收敛过程
Fig.8 Convergence process of online identification of model parameters
| 参数 | 空载 | 带载 | ||
|---|---|---|---|---|
| 辨识值 | 辨识误差/% | 辨识值 | 辨识误差/% | |
| 负载转动惯量Jl/(kg·m2) | 0.22 | 0 | 0.451 | 0.22 |
| 传动刚度Ks/(N·m·rad-1) | 1×106 | 0 | 1×106 | 0 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 0.0046 | 6.6 | 0.0047 | 6 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 20.54 | 2.7 | 20.55 | 2.75 |
| 电机正库伦摩擦力矩 /(N·m) | 0.0904 | 9.6 | 0.091 | 9 |
| 电机负库伦摩擦力矩 /(N·m) | -0.1034 | 0.34 | -0.103 | 0.3 |
| 负载正库伦摩擦力矩 /(N·m) | 4.612 | 7.76 | 4.607 | 7.86 |
| 负载负库伦摩擦力矩 /(N·m) | -4.68 | 6.4 | -4.675 | 6.5 |
| 传动间隙2θb/arcmin | 1~1.1 | 10 | 1.1 | 10 |
表3 模型参数在线辨识收敛过程
Table 3 Steady state convergence results of online identification of model parameters
| 参数 | 空载 | 带载 | ||
|---|---|---|---|---|
| 辨识值 | 辨识误差/% | 辨识值 | 辨识误差/% | |
| 负载转动惯量Jl/(kg·m2) | 0.22 | 0 | 0.451 | 0.22 |
| 传动刚度Ks/(N·m·rad-1) | 1×106 | 0 | 1×106 | 0 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 0.0046 | 6.6 | 0.0047 | 6 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 20.54 | 2.7 | 20.55 | 2.75 |
| 电机正库伦摩擦力矩 /(N·m) | 0.0904 | 9.6 | 0.091 | 9 |
| 电机负库伦摩擦力矩 /(N·m) | -0.1034 | 0.34 | -0.103 | 0.3 |
| 负载正库伦摩擦力矩 /(N·m) | 4.612 | 7.76 | 4.607 | 7.86 |
| 负载负库伦摩擦力矩 /(N·m) | -4.68 | 6.4 | -4.675 | 6.5 |
| 传动间隙2θb/arcmin | 1~1.1 | 10 | 1.1 | 10 |

图9 伺服传动装置参数在线辨识收敛过程
Fig.9 Convergence process of online identification of servo transmission device parameters
| 参数 | 空载 | 带载 |
|---|---|---|
| 负载转动惯量Jl/(kg·m2) | 0.246 | 0.453 |
| 传动刚度Ks/(N·m·rad-1) | 9.7×105 | 8.9×105 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 2.4×10-3 | 2.4×10-3 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 23.17 | 25.23 |
| 电机正库伦摩擦力矩 /(N·m) | 0.1 | 0.11 |
| 电机负库伦摩擦力矩 /(N·m) | -0.095 | -0.12 |
| 负载正库伦摩擦力矩 /(N·m) | 1.9 | 2.89 |
| 负载负库伦摩擦力矩 /(N·m) | -1.86 | -2.01 |
| 传动间隙2θb/arcmin | 0.82 | 1.74 |
表4 伺服传动装置参数在线辨识稳态收敛结果
Table 4 Steady state convergence results of online identification of servo transmission device parameters
| 参数 | 空载 | 带载 |
|---|---|---|
| 负载转动惯量Jl/(kg·m2) | 0.246 | 0.453 |
| 传动刚度Ks/(N·m·rad-1) | 9.7×105 | 8.9×105 |
| 电机黏滞阻尼系数Bm/(N·m·rad-1·s) | 2.4×10-3 | 2.4×10-3 |
| 负载黏滞阻尼系数Bl/(N·m·rad-1·s) | 23.17 | 25.23 |
| 电机正库伦摩擦力矩 /(N·m) | 0.1 | 0.11 |
| 电机负库伦摩擦力矩 /(N·m) | -0.095 | -0.12 |
| 负载正库伦摩擦力矩 /(N·m) | 1.9 | 2.89 |
| 负载负库伦摩擦力矩 /(N·m) | -1.86 | -2.01 |
| 传动间隙2θb/arcmin | 0.82 | 1.74 |
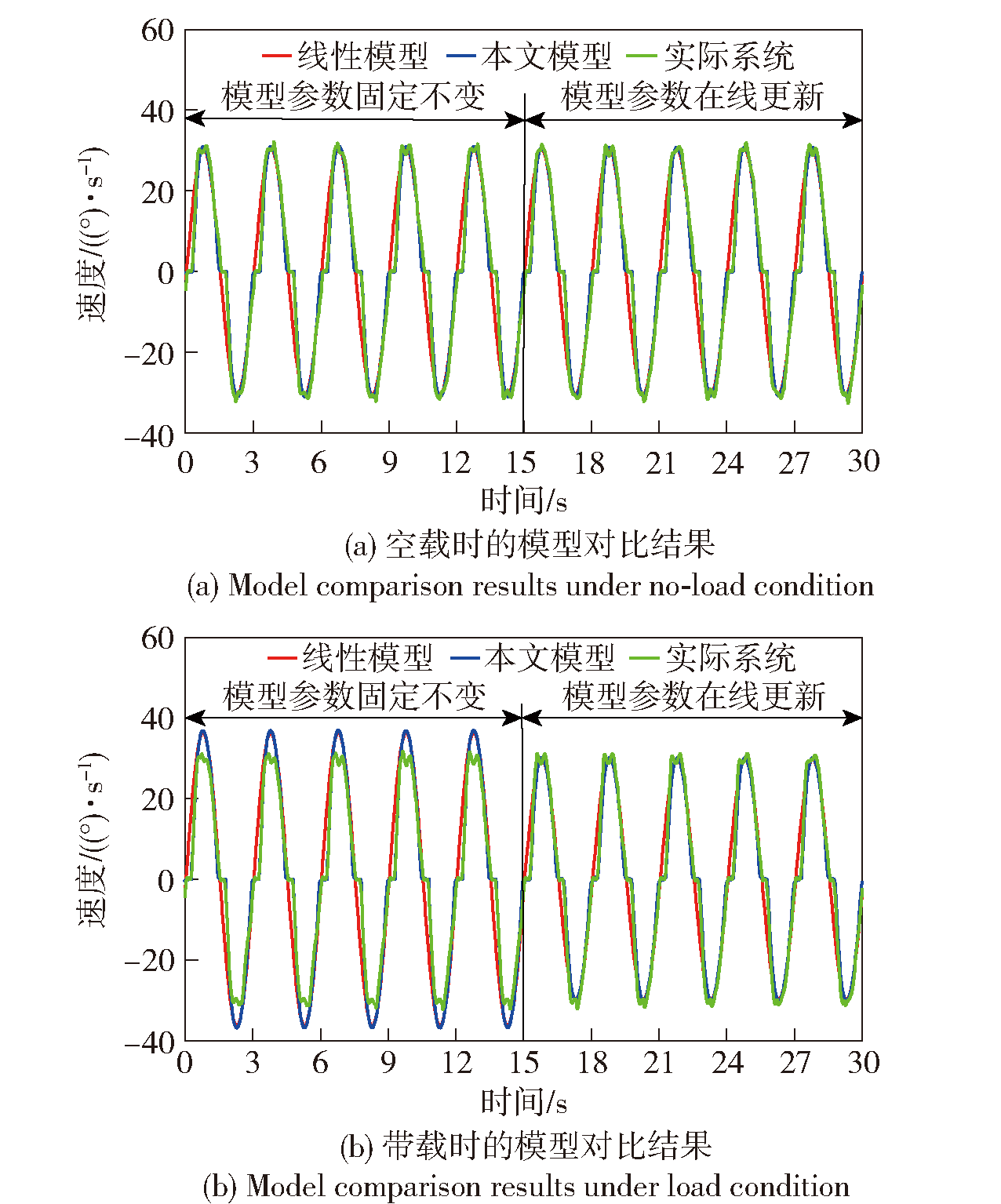
图10 不同模型对实际系统的拟合程度对比结果
Fig.10 Comparison results of fitting degrees among different models and actual systems
| 工况 | 线性模型 | 本文模型 | |||||
|---|---|---|---|---|---|---|---|
| 参数固 定不变 | 参数在 线更新 | 降低/ % | 参数固 定不变 | 降低/ % | 参数在 线更新 | 降低/ % | |
| 空载 | 5.23 | 5.16 | 1.34 | 2.12 | 59.46 | 2.11 | 59.66 |
| 带载 | 6.83 | 4.36 | 36.16 | 3.52 | 48.46 | 2.37 | 65.30 |
表5 不同模型对实际系统的拟合误差均方根
Table 5 Root mean squares of fitting errors among different models and actual systems
| 工况 | 线性模型 | 本文模型 | |||||
|---|---|---|---|---|---|---|---|
| 参数固 定不变 | 参数在 线更新 | 降低/ % | 参数固 定不变 | 降低/ % | 参数在 线更新 | 降低/ % | |
| 空载 | 5.23 | 5.16 | 1.34 | 2.12 | 59.46 | 2.11 | 59.66 |
| 带载 | 6.83 | 4.36 | 36.16 | 3.52 | 48.46 | 2.37 | 65.30 |
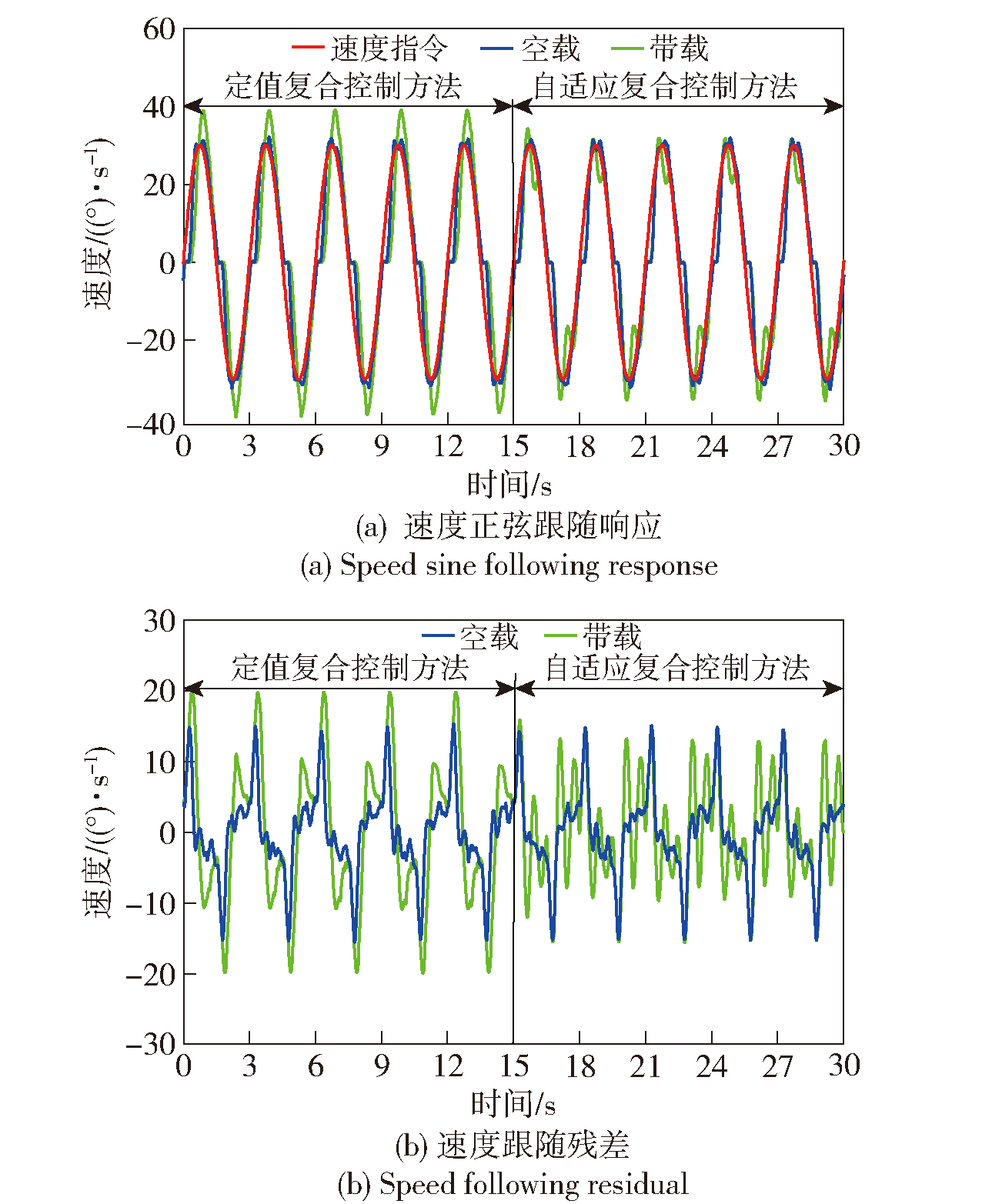
图11 自适应复合控制方法验证测试结果
Fig.11 Validation test results of adaptive composite control method
| 工况 | 定值复合控制方法 | 自适应复合控制方法 | 降低/% |
|---|---|---|---|
| 空载 | 5.92 | 5.87 | 0.84 |
| 带载 | 10.34 | 7.42 | 28.24 |
表6 不同控制方法的速度跟随残差均方根
Table 6 Root mean squares of speed following residuals for different control methods
| 工况 | 定值复合控制方法 | 自适应复合控制方法 | 降低/% |
|---|---|---|---|
| 空载 | 5.92 | 5.87 | 0.84 |
| 带载 | 10.34 | 7.42 | 28.24 |
| [1] |
向学辅, 刘启辉, 陈浩, 等. 独立跟瞄式遥控武器站控制系统稳定性分析[J]. 兵器装备工程学报, 2021, 42(2): 168-173.
|
|
|
|
| [2] |
刘浩, 徐宏斌, 李正宇, 等. 无人武器站的轻量化设计[J]. 弹箭与制导学报, 2021, 41(2): 64-67.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
程勇, 孙汉旭, 叶平, 等. 未知负载转矩下机械臂关节参数在线辨识及控制参数在线研究[J]. 机械设计与制造, 2016(11): 30-33,37.
|
|
|
|
| [7] |
程善美, 张益. 基于协同粒子群算法的PMSM在线参数辨识[J]. 电气传动, 2012, 42(11).
|
|
|
|
| [8] |
熊琰, 李叶松. 基于粒子群优化的伺服谐振系统的参数辨识[J]. 华中科技大学学报(自然科学版), 2014, 42(12): 111-115.
|
|
|
|
| [9] |
|
| [10] |
doi: 10.1016/j.isatra.2013.03.002 pmid: 23659836 |
| [11] |
doi: S0019-0578(17)30617-1 pmid: 29224853 |
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
祁超, 范世珣, 谢馨, 等. 光电稳定平台伺服机构低速及稳定性能控制方法研究[J]. 兵工学报, 2018, 39(10): 1873-1882.
doi: 10.3969/j.issn.1000-1093.2018.10.001 |
|
doi: 10.3969/j.issn.1000-1093.2018.10.001 |
|
| [19] |
|
| [20] |
|
| [1] | 鲍丹, 卫俞凯, 金鑫, 侯保林. 考虑输出约束和输入饱和的弹仓自适应控制[J]. 兵工学报, 2024, 45(3): 789-797. |
| [2] | 张天艺, 郑颖, 裘信国, 季行健, 金晓航. 基于特征模型的5阶关节伺服系统扰动补偿策略[J]. 兵工学报, 2024, 45(1): 276-287. |
| [3] | 禹志龙, 李颖晖, 裴彬彬, 徐文丰, 段效聪, 宋可鑫. 具有飞行包线限制的飞翼无人机鲁棒自适应容错姿态控制[J]. 兵工学报, 2024, 45(1): 231-240. |
| [4] | 闵博旭, 高剑, 井安言, 陈依民, 王佳润, 潘光. 基于事件触发的水下滑翔机自适应容错俯仰控制[J]. 兵工学报, 2023, 44(7): 2092-2100. |
| [5] | 万子平, 谭若愚, 郑杰基, 任广安, 谢馨, 范大鹏. 面向武器站模块化基座的多工况与静动态筋壁结构高效设计方法[J]. 兵工学报, 2023, 44(2): 577-590. |
| [6] | 李先艳, 许威, 江磊, 孙泽源, 谢强, 曾怡, 郑冬冬. 含输入饱和的自动驾驶汽车预设性能自适应控制[J]. 兵工学报, 2023, 44(11): 3310-3319. |
| [7] | 袁树森, 邓文翔, 姚建勇, 杨国来. 全电坦克双向稳定系统自适应积分鲁棒控制[J]. 兵工学报, 2023, 44(1): 140-155. |
| [8] | 唐泽月, 刘海鸥, 薛明轩, 陈慧岩, 龚小杰, 陶俊峰. 基于MPC-MFAC的双侧独立电驱动无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(1): 129-139. |
| [9] | 姜尚, 陈锋, 高伟鹏, 李进军, 孙东彦. 弹群在复杂作战空间下的自适应分布式协同制导策略[J]. 兵工学报, 2022, 43(S2): 97-106. |
| [10] | 魏连震, 龚建伟, 陈慧岩, 李子睿, 龚乘. 基于强化学习补偿的地面无人战车行进间跟瞄自适应控制[J]. 兵工学报, 2022, 43(8): 1947-1955. |
| [11] | 苗双全, 张宝泉, 王明超, 王新伟, 沈宇. 基于扰动观测器的机载光电稳定平台自适应指数时变滑模控制[J]. 兵工学报, 2022, 43(7): 1636-1645. |
| [12] | 张通彤, 姜湖海, 岳巍, 司晨, 袁满. 基于径向基函数神经网络的光电系统自适应控制[J]. 兵工学报, 2022, 43(3): 556-564. |
| [13] | 王慧东, 周来宏. 四旋翼无人机反步积分自适应控制器设计[J]. 兵工学报, 2021, 42(6): 1283-1289. |
| [14] | 岳彬, 马文, 呼卫军. 高超声速飞行器的自适应容错控制[J]. 兵工学报, 2021, 42(3): 521-529. |
| [15] | 王之千, 毛保全, 朱锐, 杨雨迎, 韩小平. 遥控武器站黏弹性胶体缓冲器试验研究[J]. 兵工学报, 2020, 41(2): 209-221. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4