
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3394-3406.doi: 10.12382/bgxb.2023.0776
所属专题: 群体协同与自主技术
傅晋博1,2, 张栋1,2,*( ), 王孟阳1,2, 赵军民3,4
), 王孟阳1,2, 赵军民3,4
收稿日期:2023-08-21
上线日期:2023-11-02
通讯作者:
基金资助:
FU Jinbo1,2, ZHANG Dong1,2,*(), WANG Mengyang1,2, ZHAO Junmin3,4
Received:2023-08-21
Online:2023-11-02
摘要:
针对机动目标定位的精度提升问题,给出两种典型任务场景下机动目标定位的在线协同航迹规划方法。建立测向交叉目标定位模型,基于几何精度因子确定影响定位精度的因素,分析影响要素对定位精度的影响规律;对于低速机动目标定位,以几何精度因子为评估指标,提出一种基于变曲率杜宾斯曲线的在线协同航迹生成方法,实现协同定位最优构型的快速航迹生成;对于高速机动目标协同定位问题,建立面向目标定位精度的最优控制模型,提出一种基于内点法的罚函数协同航迹规划方法;进行数字与半实物仿真验证。研究结果表明:在两种典型任务场景下,目标协同定位精度提升36.9%和23.5%,验证了新方法的有效性,新方法对于集群协同目标定位具有工程应用价值。
中图分类号:
傅晋博, 张栋, 王孟阳, 赵军民. 面向目标定位精度提升的无人机航迹规划[J]. 兵工学报, 2023, 44(11): 3394-3406.
FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy[J]. Acta Armamentarii, 2023, 44(11): 3394-3406.
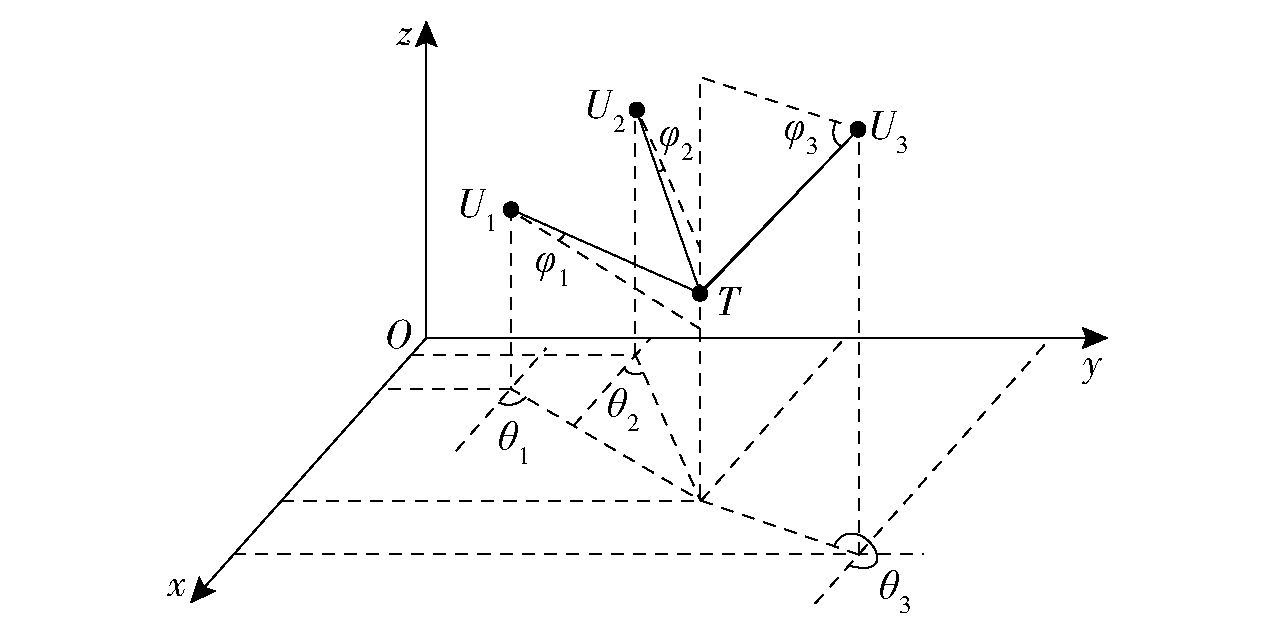
图1 测向交叉定位示意图
Fig.1 Schematic diagram of direction-finding cross-positioning
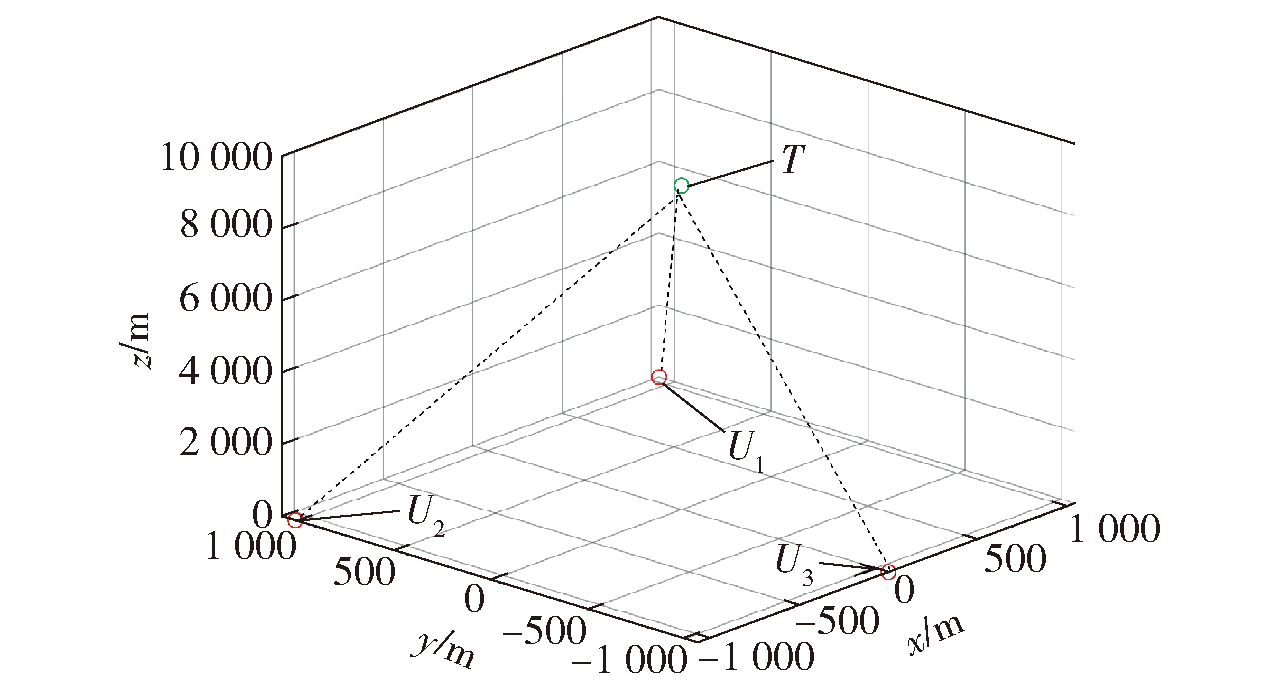
图2 模拟场景示意图
Fig.2 Simulated scenario diagram

图3 不同高度下目标位置与GDOP关系
Fig.3 Relationship between target position and GDOP at different altitudes
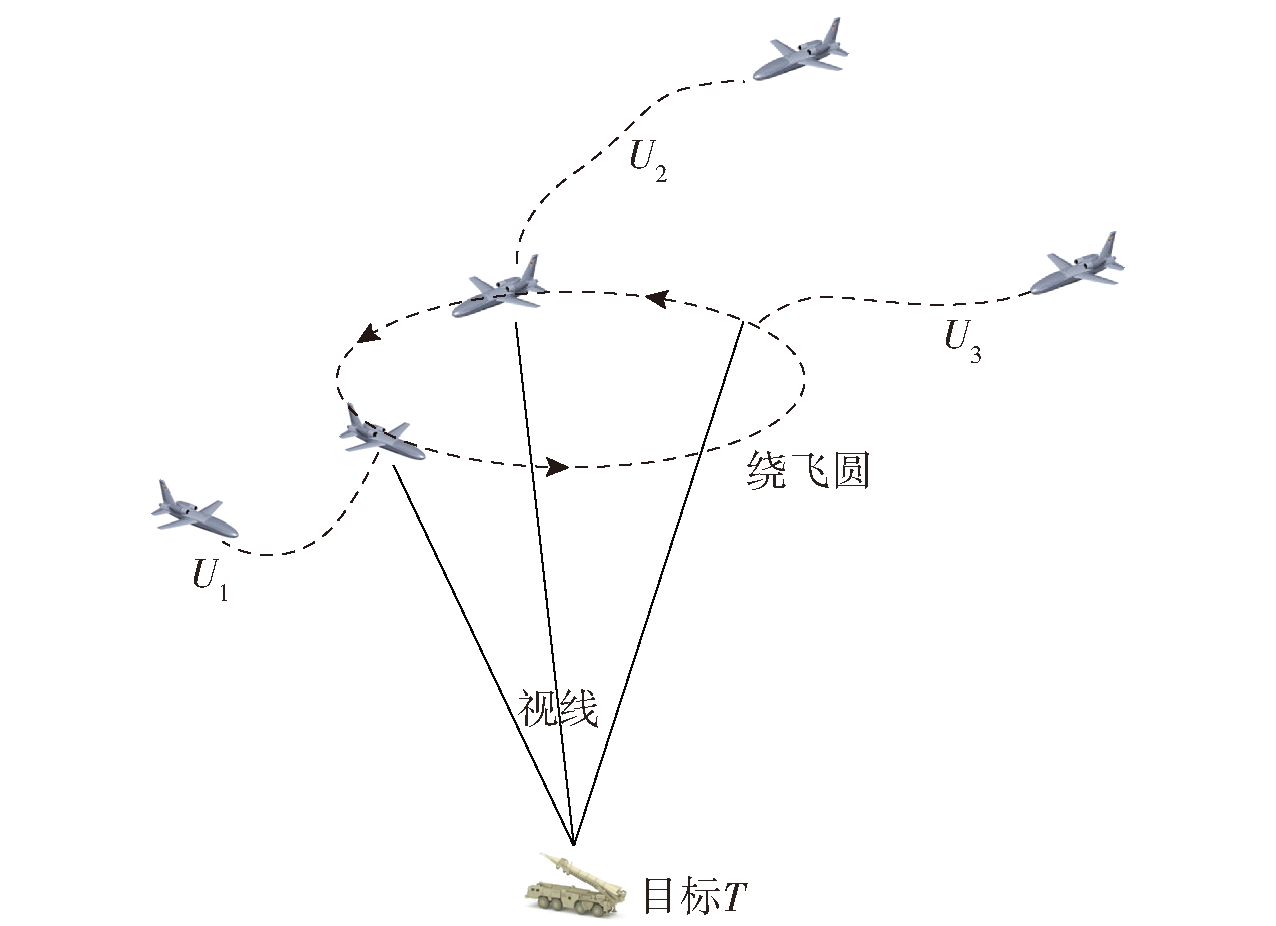
图4 低速目标绕飞协同定位策略
Fig.4 Low-speed target go-around co-positioning strategy
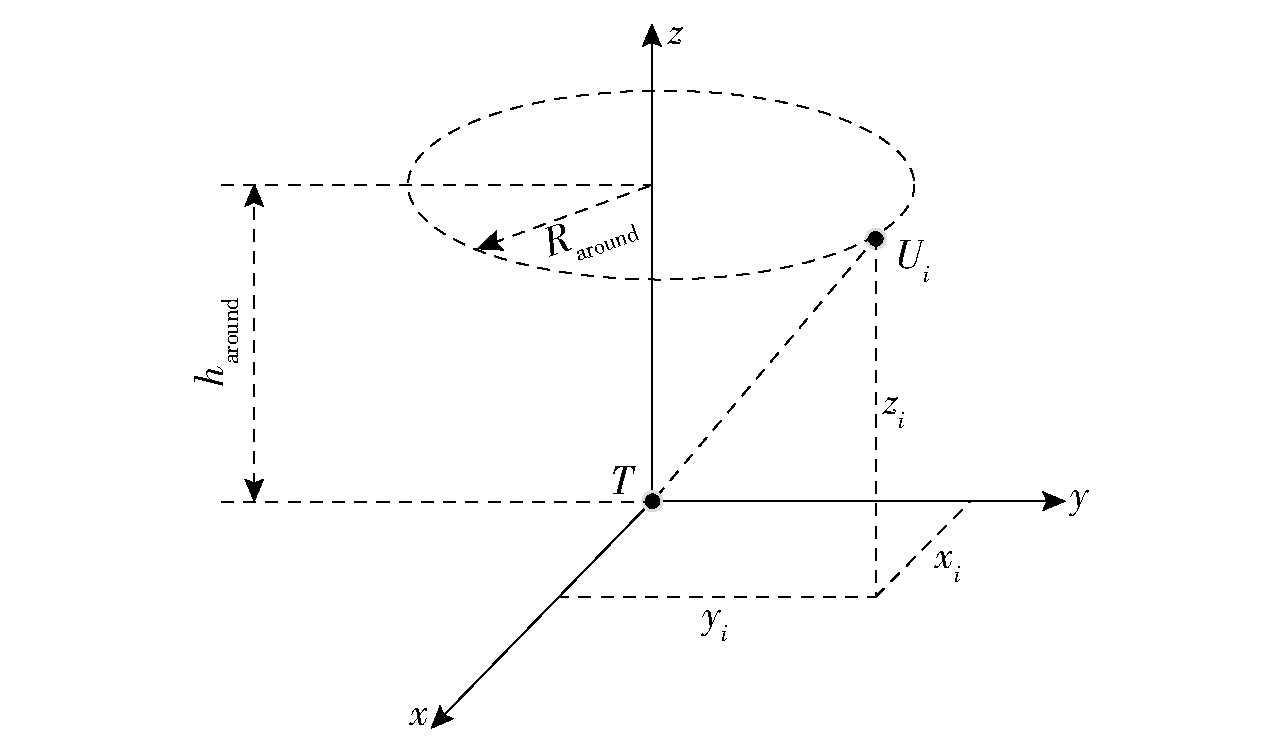
图5 绕飞协同定位模型示意图
Fig.5 Schematic diagram of fly-by-wire co-positioning model
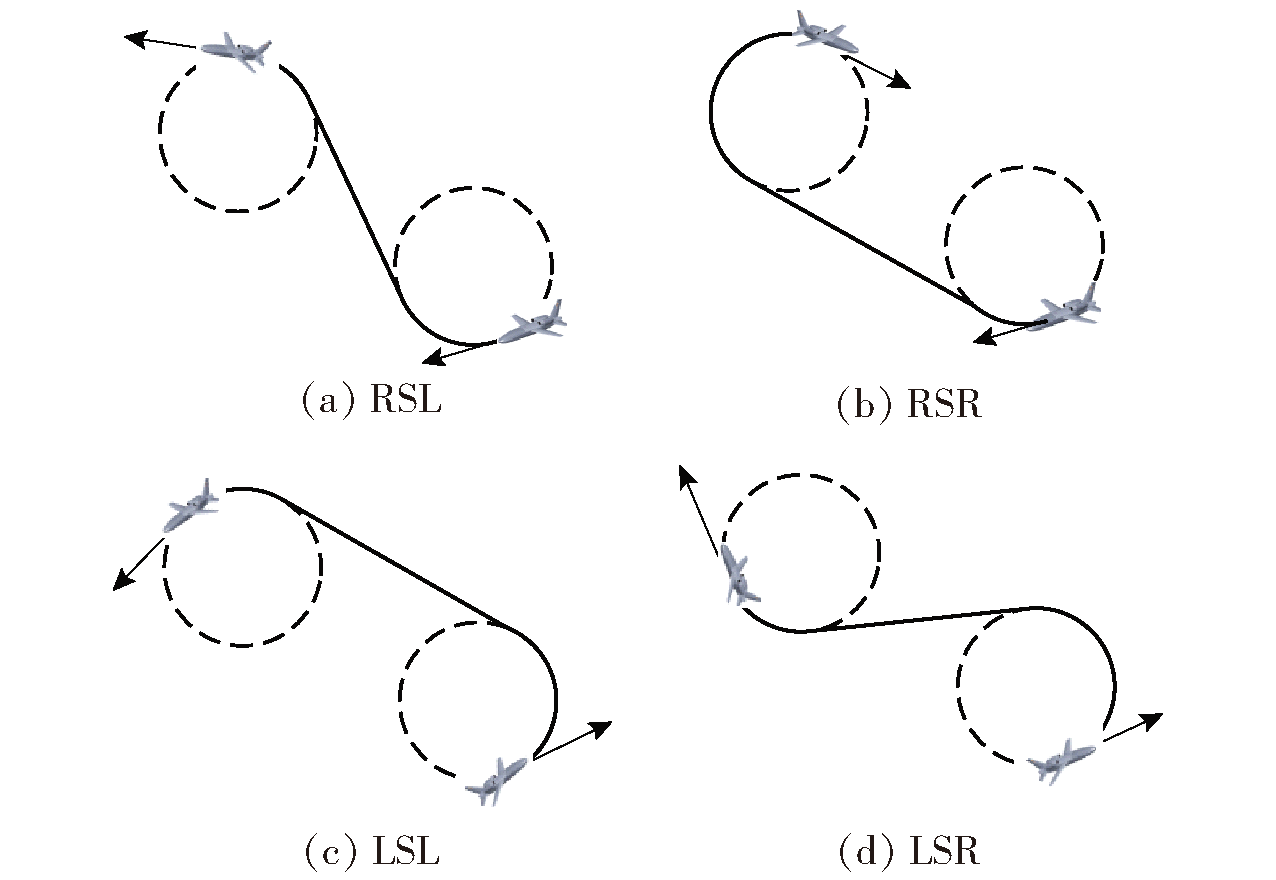
图6 Dubins曲线4种基本形式
Fig.6 4 basic forms of Dubins curves
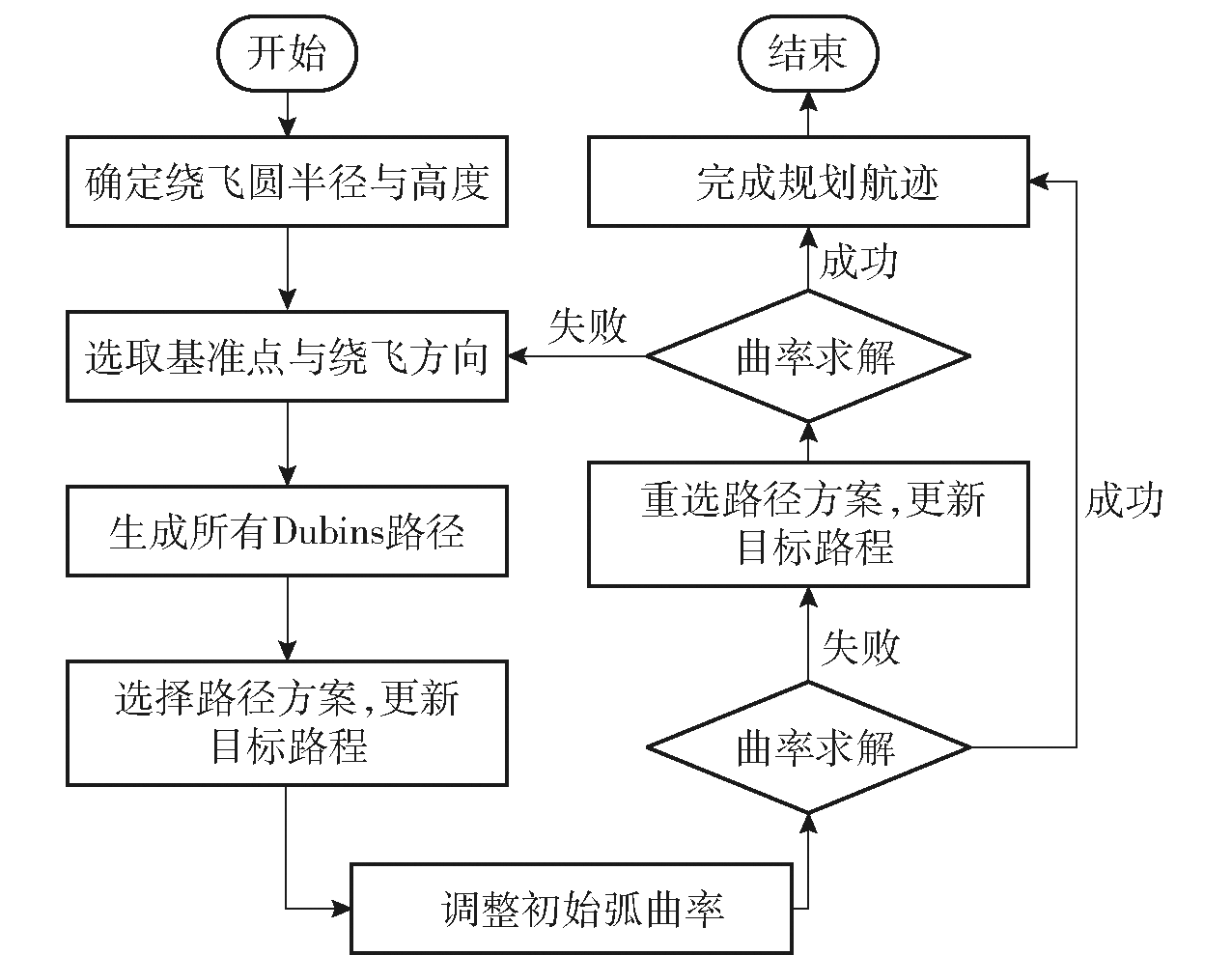
图7 航迹规划流程
Fig.7 Path planning process
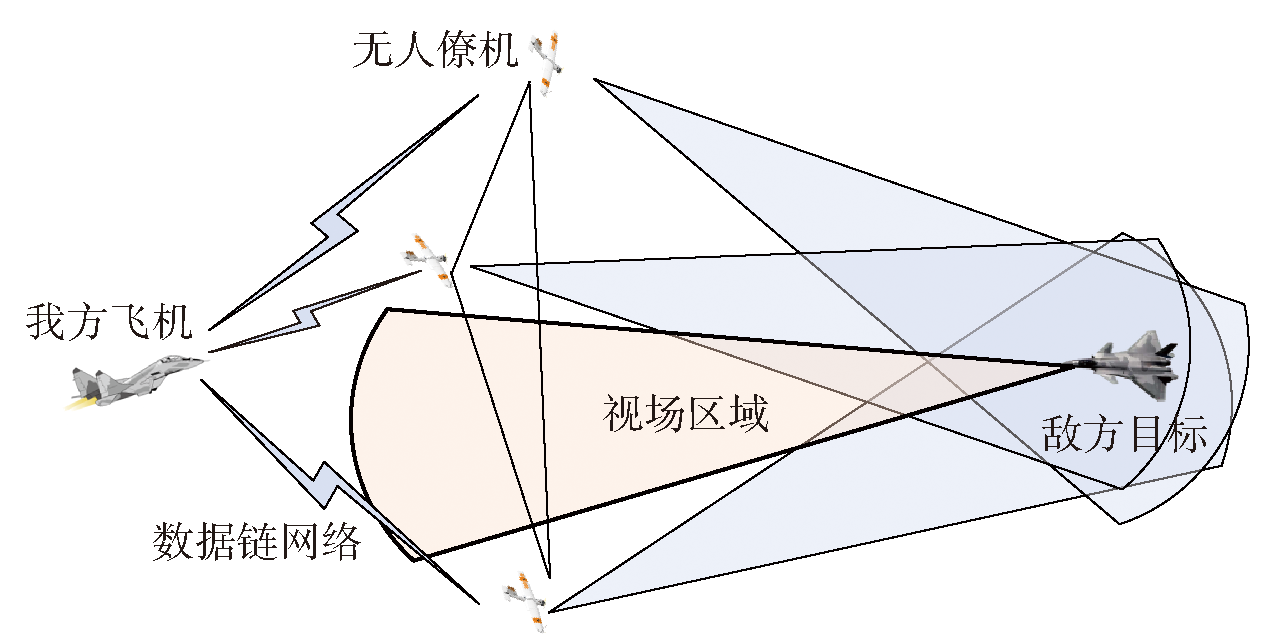
图8 高速机动目标协同定位场景示意图
Fig.8 Schematic diagram of high-speed maneuvering target co-positioning scenario
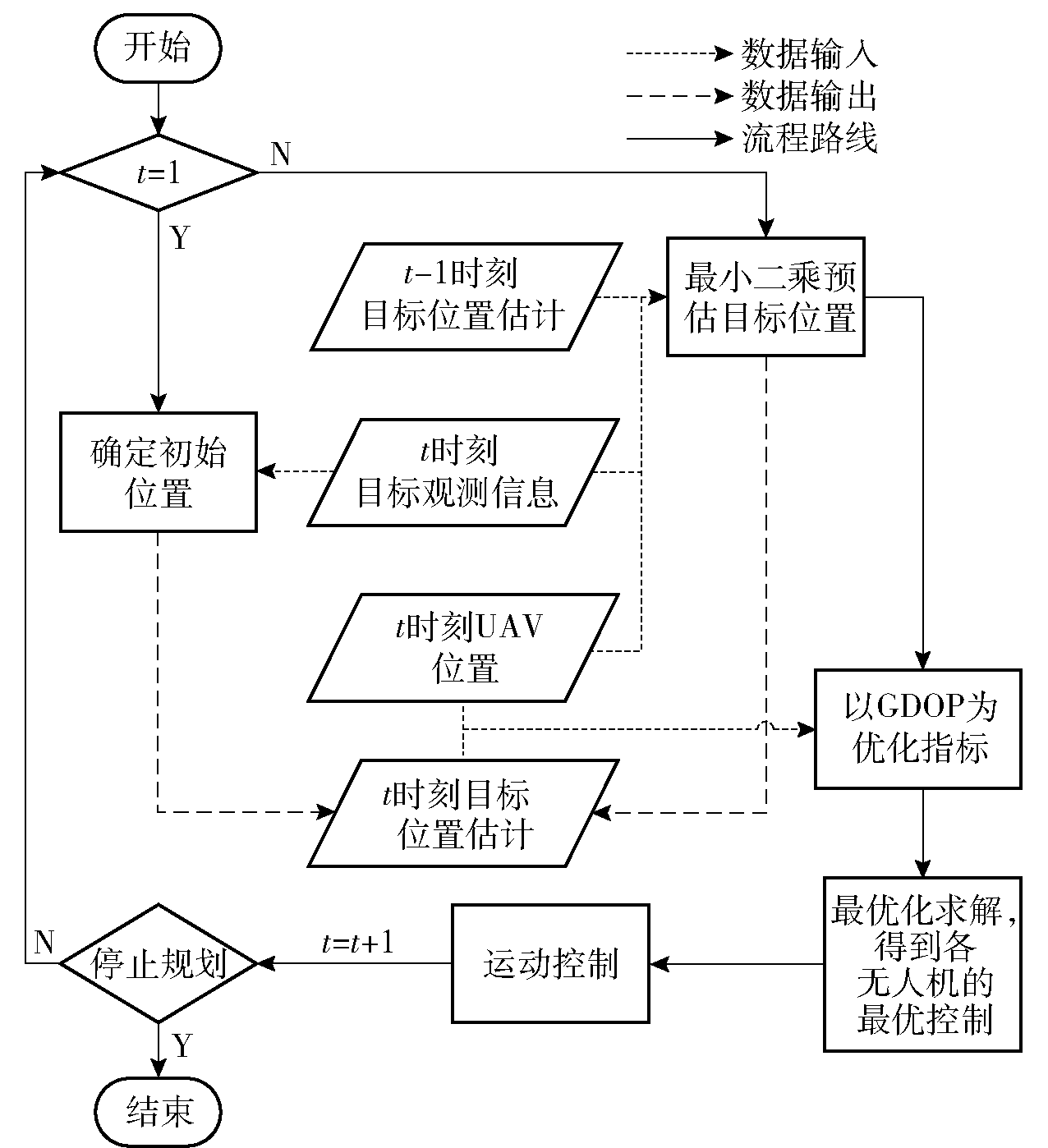
图9 算法流程图
Fig.9 Flowchart of the proposed algorithm
| 参数 | 数值 |
|---|---|
| 无人机1初始状态 | P1=[ ] |
| 无人机2初始状态 | P2=[ ] |
| 无人机3初始状态 | P3=[ ] |
| 无人机4初始状态 | P4=[ ] |
| 目标初始位置/m | PT=[0 0] |
| 基准点速度方向/rad | |
| 最低飞行高度/m | 100 |
| 最小转弯半径/m | 100 |
表1 仿真参数
Table 1 Simulation parameters
| 参数 | 数值 |
|---|---|
| 无人机1初始状态 | P1=[ ] |
| 无人机2初始状态 | P2=[ ] |
| 无人机3初始状态 | P3=[ ] |
| 无人机4初始状态 | P4=[ ] |
| 目标初始位置/m | PT=[0 0] |
| 基准点速度方向/rad | |
| 最低飞行高度/m | 100 |
| 最小转弯半径/m | 100 |
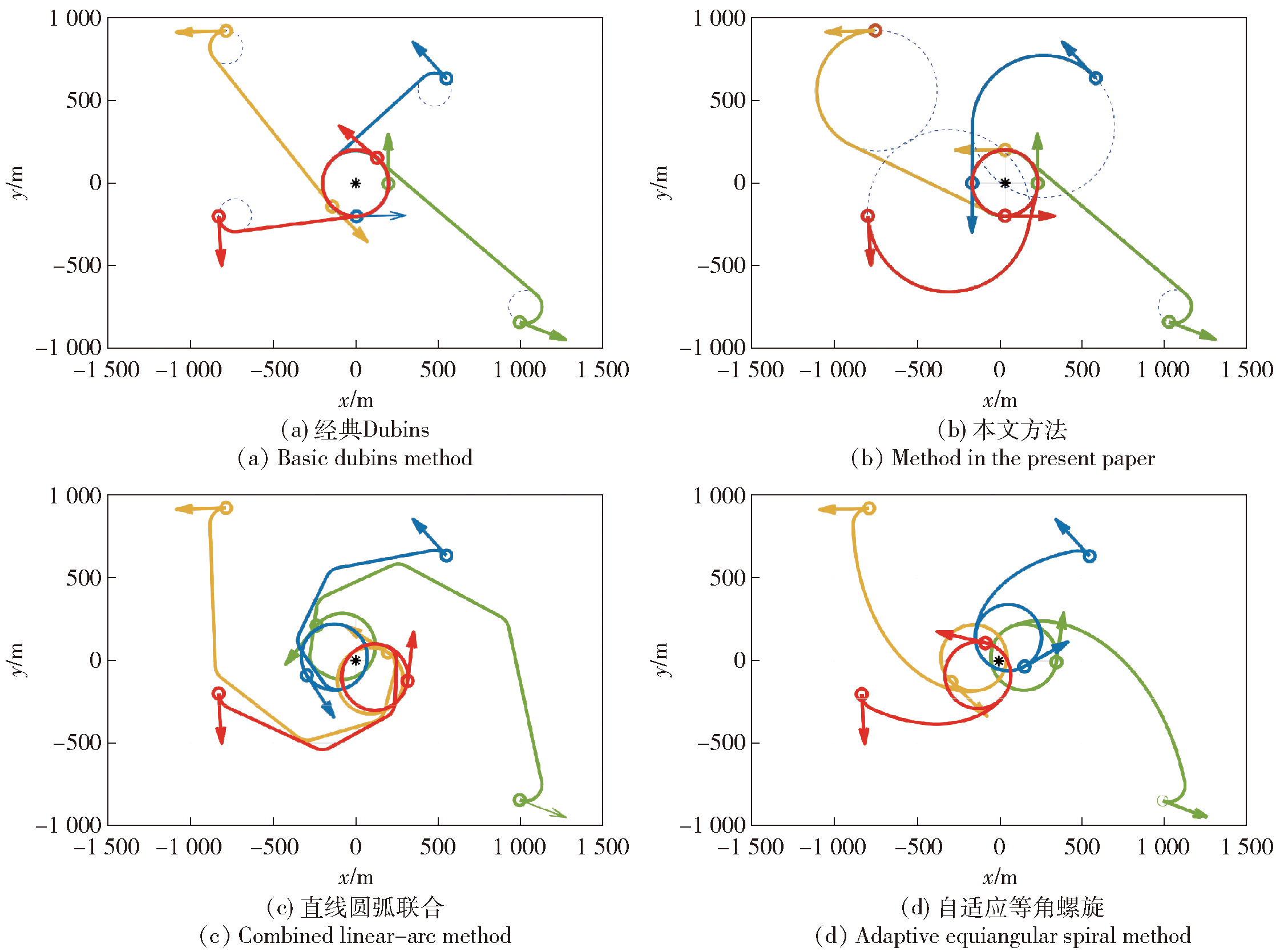
图10 协同航迹规划结果航迹对比
Fig.10 Comparison of cooperative path planning result paths
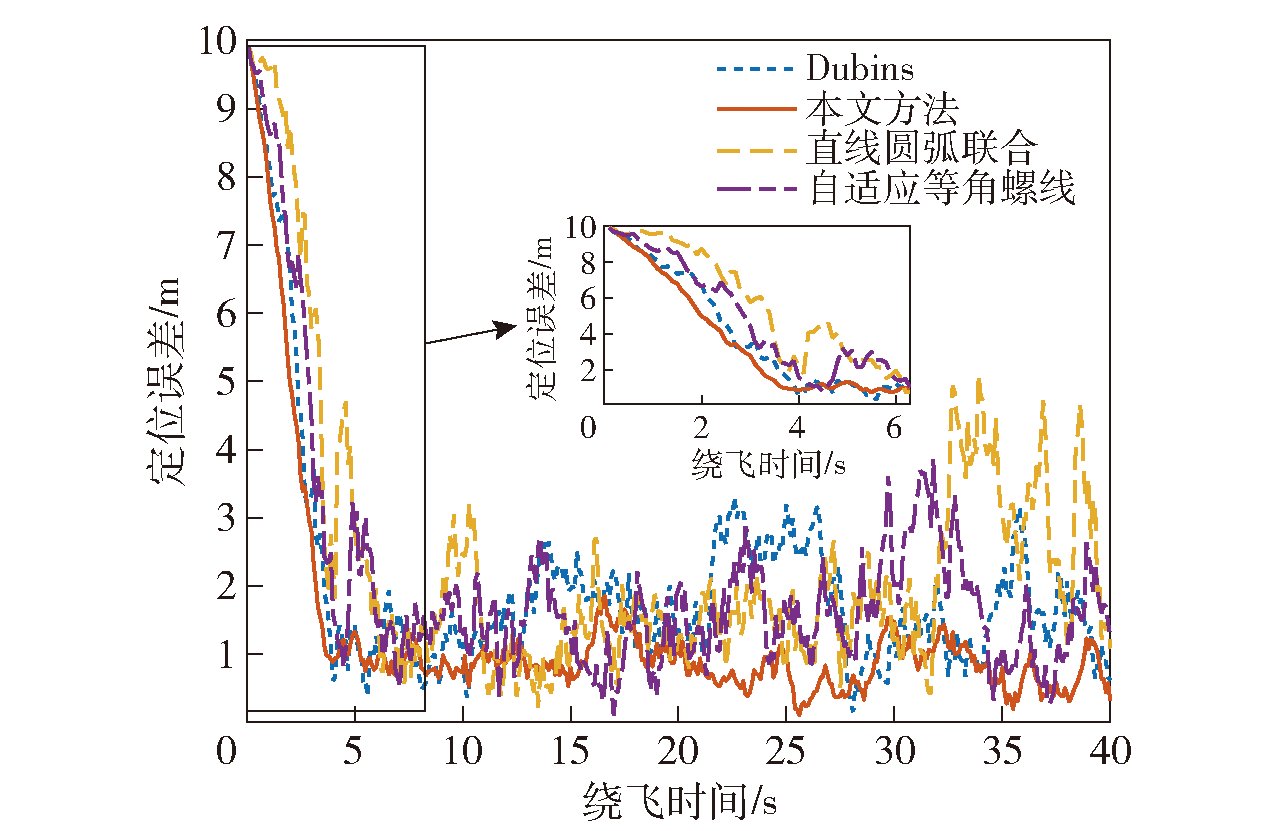
图11 不同方法定位误差对比
Fig.11 Comparison of errors of different methods
| 航迹规划方法 | 平均误差/m | 航迹规划方法 | 平均误差/m |
|---|---|---|---|
| Dubins | 1.2845 | 直线圆弧联合 | 2.7979 |
| 本文方法 | 0.8101 | 自适应等角螺线 | 1.7824 |
表2 定位误差对比
Table 2 Comparison of positioning errors
| 航迹规划方法 | 平均误差/m | 航迹规划方法 | 平均误差/m |
|---|---|---|---|
| Dubins | 1.2845 | 直线圆弧联合 | 2.7979 |
| 本文方法 | 0.8101 | 自适应等角螺线 | 1.7824 |
| 仿真参数 | 数值 |
|---|---|
| 无人机1初始位置/m | P1=[ ] |
| 无人机2初始位置/m | P2=[ ] |
| 无人机3初始位置/m | P3=[ ] |
| 目标初始位置/m | PT=[ ] |
| 无人机初始速度/(m·s-1) | 30 |
| 目标速度大小/(m·s-1) | 30 |
| 无人机速度范围/(m·s-1) | [20,40] |
| 加速度范围/(m·s-2) | [-1,1] |
| 视线角范围/(°) | -15≤λ≤15 |
| 最大通信距离/m | 3000 |
表3 在线规划仿真参数
Table 3 Online planning simulation parameters
| 仿真参数 | 数值 |
|---|---|
| 无人机1初始位置/m | P1=[ ] |
| 无人机2初始位置/m | P2=[ ] |
| 无人机3初始位置/m | P3=[ ] |
| 目标初始位置/m | PT=[ ] |
| 无人机初始速度/(m·s-1) | 30 |
| 目标速度大小/(m·s-1) | 30 |
| 无人机速度范围/(m·s-1) | [20,40] |
| 加速度范围/(m·s-2) | [-1,1] |
| 视线角范围/(°) | -15≤λ≤15 |
| 最大通信距离/m | 3000 |
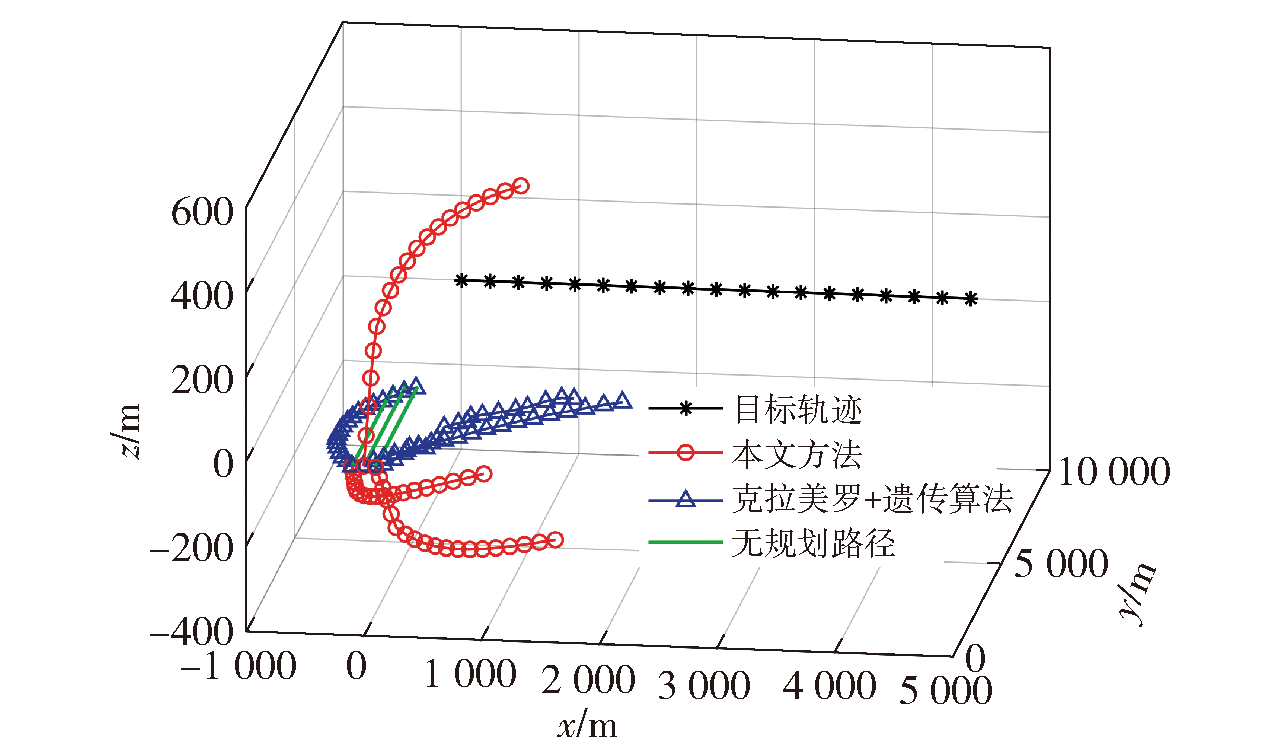
图12 不同方法轨迹对比
Fig.12 Comparison of paths of different methods
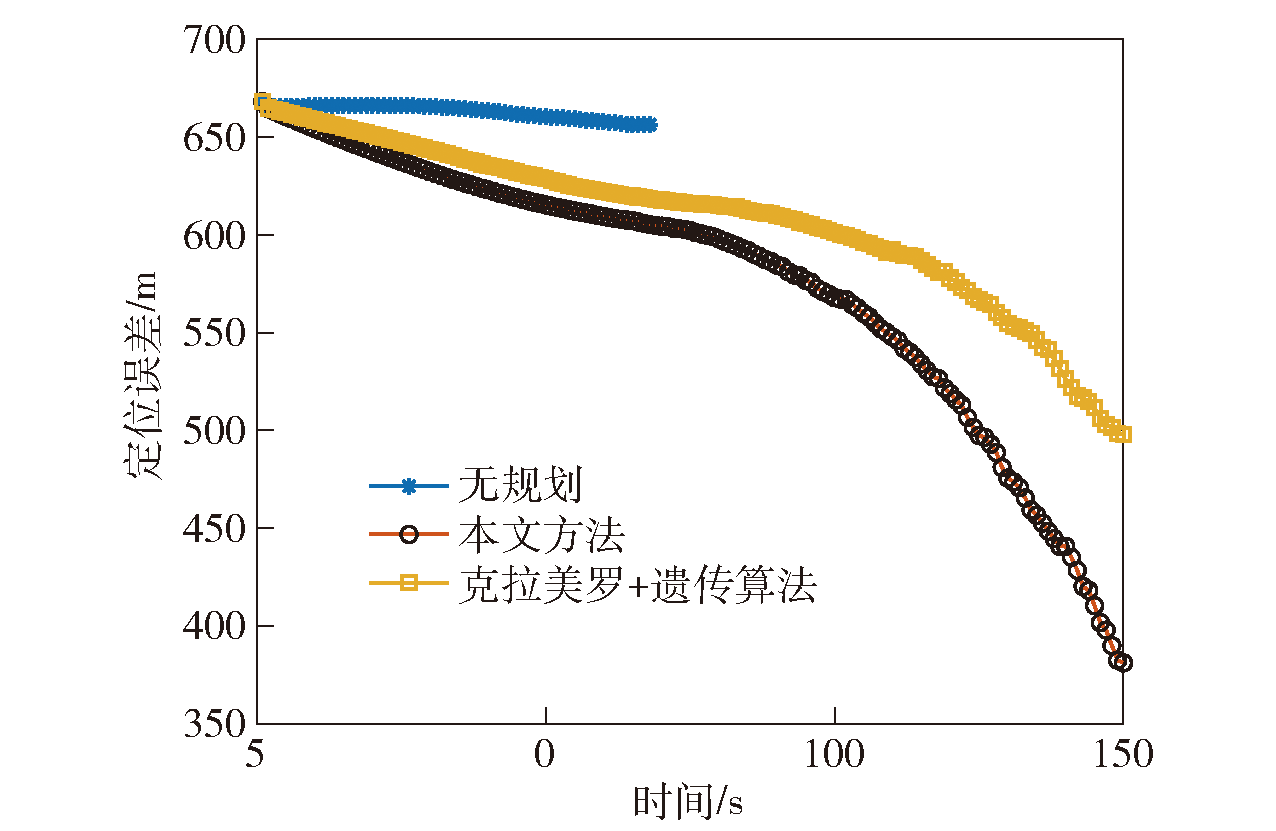
图13 不同在线方法定位误差对比
Fig.13 Comparison of positioning errors with different online methods

图14 虚实结合半实物仿真实验平台
Fig.14 Semi-physical simulation experiment platform with combinination of virtuality and reality
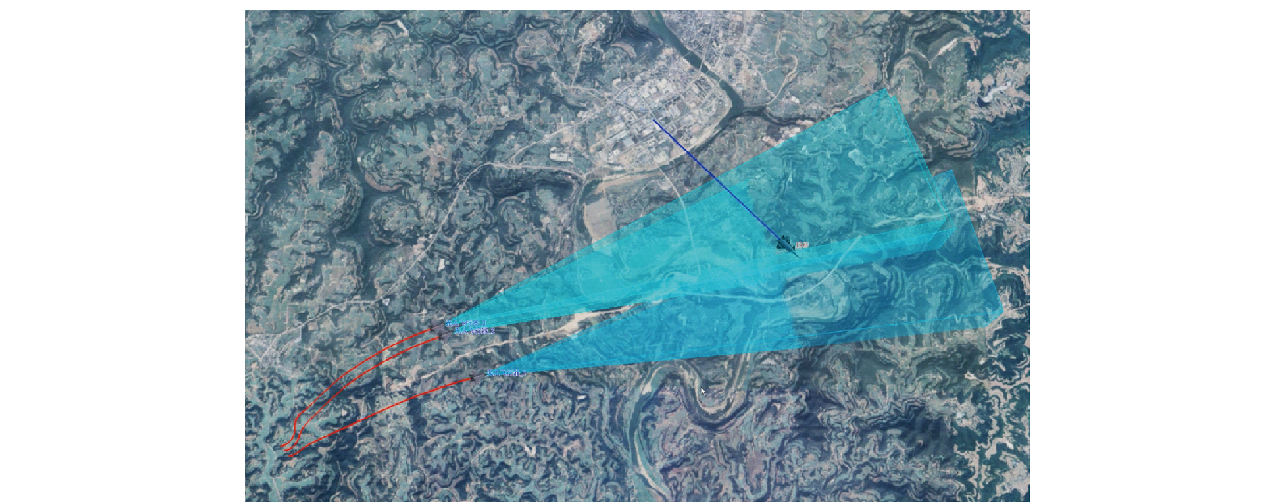
图15 三机协同定位在线规划仿真
Fig.15 Simulation of online planning for three-UAV cooperative positioning
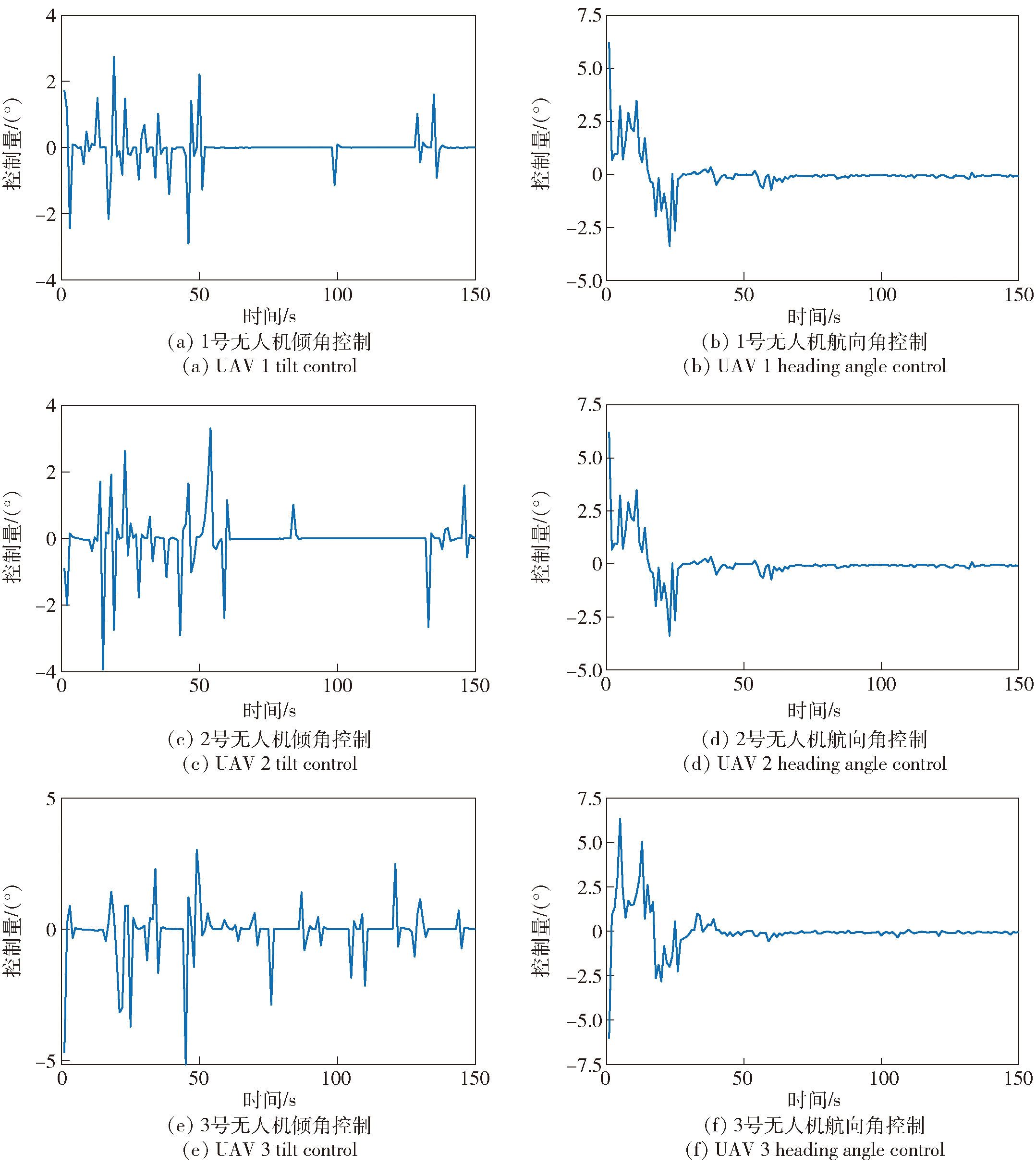
图16 无人机控制输出
Fig.16 UAV control outputs
| [1] |
杨晨, 张少卿, 孟光磊. 多无人机协同任务规划研究[J]. 指挥与控制学报, 2018, 4(3):234-248.
|
|
|
|
| [2] |
武成锋, 程进, 郭晓云, 等. 飞行器集群协同定位与导航对抗技术发展与展望[J]. 宇航学报, 2022, 43(2):131-142.
|
|
|
|
| [3] |
doi: 10.1109/JIOT.2021.3081918 URL |
| [4] |
王鼎, 尹洁昕, 张欣光, 等. 一种基于加权多维标度分析的多个非相关源TDOA/FDOA协同定位方法[J]. 航空学报, 2023, 44(7):327105-1-327105-24.
|
|
|
|
| [5] |
doi: 10.1109/Access.6287639 URL |
| [6] |
|
| [7] |
何胜阳, 杜杰朋, 赵雅琴, 等. 基于TDOA的无人机集群协同单目标定位[J]. 系统工程与电子技术, 2023, 45(1):1-8.
doi: 10.12305/j.issn.1001-506X.2023.01.01 |
|
|
|
| [8] |
王维佳, 王玉冰, 田瑾, 等. 航空集群一发多收有源定位最优构型[J]. 兵工学报, 2023, 44(6):1655-1664.
doi: 10.12382/bgxb.2022.0104 |
|
|
|
| [9] |
张立川, 屈俊琪, 潘光, 等. 基于几何解释的集群AUV协同定位误差及编队构型分析[J]. 西北工业大学学报, 2020, 38(4):755-765.
|
|
doi: 10.1051/jnwpu/20203840755 URL |
|
| [10] |
朱徐东, 赖际舟, 周本川, 等. 基于构型寻优的多无人机鲁棒自适应协同定位方法[J]. 中国惯性技术学报, 2023, 31(7):650-658,664.
|
|
|
|
| [11] |
李清华, 高影, 王振桓, 等. 一种动态分组的多节点协同定位编队构型优化方法[J]. 中国惯性技术学报, 2022, 30(6):746-751,759.
|
|
|
|
| [12] |
胡利平, 梁晓龙, 张佳强, 等. 三机协同无源时差定位最优编队构型分析[J]. 火力与指挥控制, 2017, 42(9):49-54.
|
|
|
|
| [13] |
doi: 10.1109/ACCESS.2021.3090514 URL |
| [14] |
|
| [15] |
|
| [16] |
doi: 10.3390/app8061001 URL |
| [17] |
杨俊岭, 周宇, 王维佳, 等. 基于演化深度神经网络的无人机协同无源定位动态航迹规划[J]. 科技导报, 2018, 36(24):26-32.
|
|
|
|
| [18] |
顾伟, 吴靖, 李晟, 等. 带定位误差约束的多无人机快速协同航迹规划[J]. 计算机仿真, 2022, 39(10):60-65.
|
|
|
|
| [19] |
季瑶. 面向协同监控的无人机航迹规划问题研究[D]. 南京: 南京航空航天大学, 2020.
|
|
|
|
| [20] |
樊皓, 姜家财, 孙学. 双机协同交叉定位的三维航迹规划[J]. 传感器与微系统, 2020, 39(1):26-28,32.
|
|
|
|
| [21] |
doi: 10.3390/s22239380 URL |
| [22] |
关欣, 陶李, 衣晓. 多站协同定位的定位精度研究[J]. 计算机与数字工程, 2016, 44(5):829-834.
|
|
|
|
| [23] |
doi: 10.1007/s10514-020-09932-x |
| [24] |
|
| [25] |
勇俊, 李昭, 郑翠娥, 等. 超短基线纯方位定位的目标搜索航迹规划[J]. 哈尔滨工程大学学报, 2012, 33(4):438-444.
|
|
|
| [1] | 周悦, 李壮壮, 郑然舜, 李军. 无人机火箭助推机构分离安全性研究[J]. 兵工学报, 2024, 45(1): 219-230. |
| [2] | 禹志龙, 李颖晖, 裴彬彬, 徐文丰, 段效聪, 宋可鑫. 具有飞行包线限制的飞翼无人机鲁棒自适应容错姿态控制[J]. 兵工学报, 2024, 45(1): 231-240. |
| [3] | 郭志明, 娄文忠, 李涛, 张梦宇, 白子龙, 乔虎. 基于改进蝗虫优化算法考虑任务威胁的多无人机协同航迹规划[J]. 兵工学报, 2023, 44(S2): 52-60. |
| [4] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [5] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [6] | 曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166. |
| [7] | 赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696. |
| [8] | 李曾琳, 李波, 白双霞, 孟波波. 基于AM-SAC的无人机自主空战决策[J]. 兵工学报, 2023, 44(9): 2849-2858. |
| [9] | 李思琪, 龚鹏, 单丹, 李剑锋, 刘宇, 高翔. 基于QualNet的无人机信息攻击半实物测试架构设计与实现[J]. 兵工学报, 2023, 44(9): 2709-2721. |
| [10] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [11] | 曹严, 龙腾, 孙景亮, 周禹泽. 信息重传与丢包补偿的多无人机分布式任务分配方法[J]. 兵工学报, 2023, 44(9): 2697-2708. |
| [12] | 刘兴宇, 郭荣化, 任成才, 闫超, 常远, 周晗, 相晓嘉. 基于身份匈牙利算法的无人机蜂群分布式目标分配方法[J]. 兵工学报, 2023, 44(9): 2824-2835. |
| [13] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [14] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [15] | 宫远强, 张业鹏, 马万鹏, 薛霄. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9): 2661-2671. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4