
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (1): 247-259.doi: 10.12382/bgxb.2022.0823
所属专题: 特种车辆理论与技术
姜祎1,2,3, 王挺1,2,*( ), 邵沛瑶4, 徐瑶5, 邵士亮1,2
), 邵沛瑶4, 徐瑶5, 邵士亮1,2
收稿日期:2022-09-14
上线日期:2023-02-10
通讯作者:
基金资助:
JIANG Yi1,2,3, WANG Ting1,2,*(), SHAO Peiyao4, XU Yao5, SHAO Shiliang1,2
Received:2022-09-14
Online:2023-02-10
摘要:
为实现地面移动机器人在复杂地形下的环境探索需求,结合轮式机器人的高速特性和足式机器人对地形适应性强的特征,提出一种轮幅型轮腿复合型机器人,并针对其在移动过程中的振动问题以及爬梯过程中的越障问题,对机器人进行步态研究及性能分析。从静力学分析中得出机器人轮腿结构以不同姿态着地时的受力情况,结合实际情况中机器人运动约束对机器人在前进、转向和越障等任务中的步态进行分析,并基于动力学仿真ADAMS软件建立动力学模型来模拟机器人不同步态下的振动情况以及越障性能。研究结果表明,结合本文提出的步态控制方法,该轮腿复合型机器人在复杂地形环境中具有较好的行进效率和越障能力。
中图分类号:
姜祎, 王挺, 邵沛瑶, 徐瑶, 邵士亮. 一种轮腿复合型机器人的步态研究与越障性能分析[J]. 兵工学报, 2023, 44(1): 247-259.
JIANG Yi, WANG Ting, SHAO Peiyao, XU Yao, SHAO Shiliang. Gait Study and Obstacle-Surmounting Performance Analysis of a Wheel-Leg Hybrid Robot[J]. Acta Armamentarii, 2023, 44(1): 247-259.

图1 4种轮腿复合型机器人
Fig.1 Four kinds wheel-leg hybrid robots
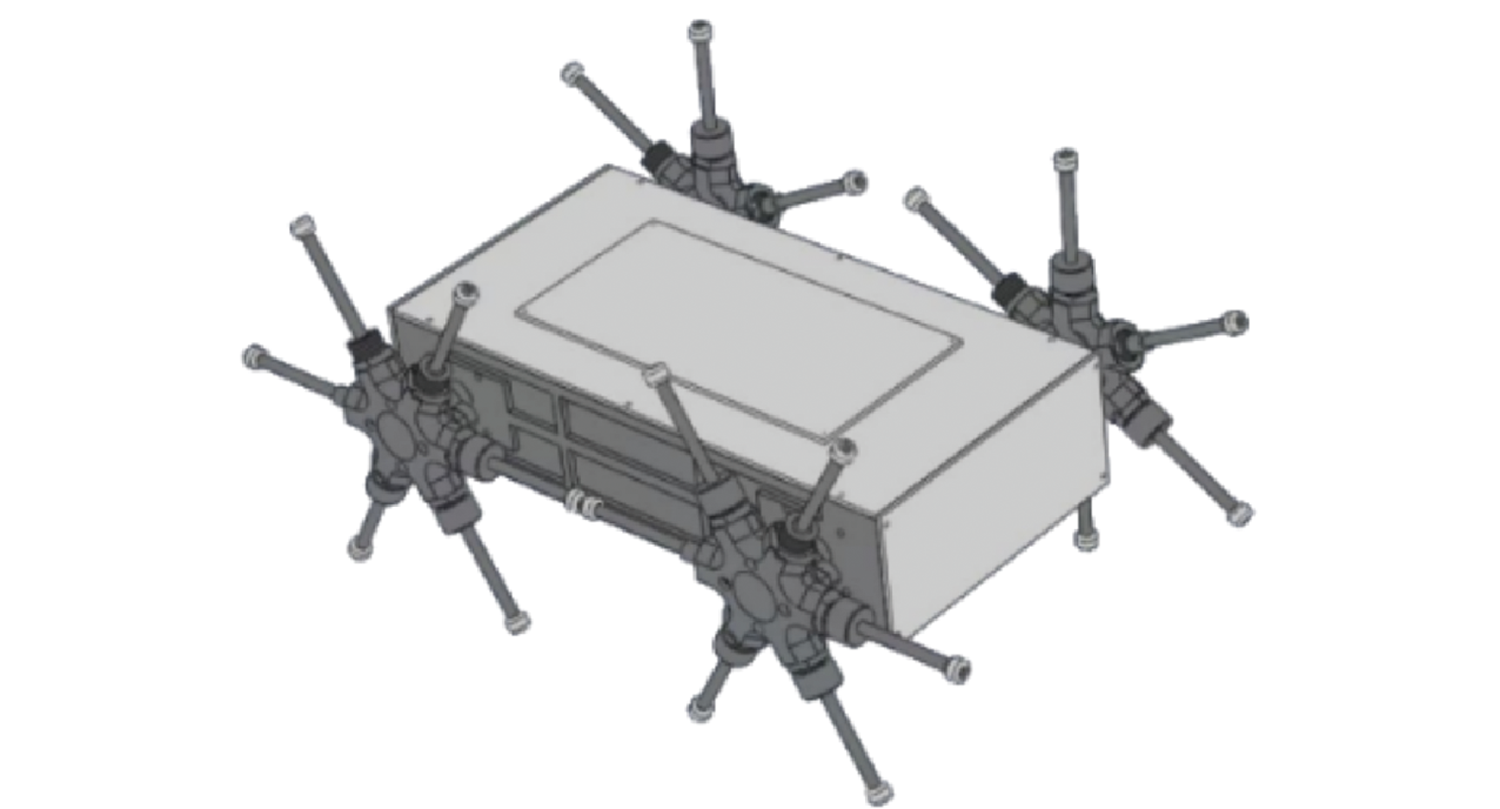
图2 六轮幅轮腿机器人整体结构图
Fig.2 Overall structure diagram of a six-spoke wheel-leg robot
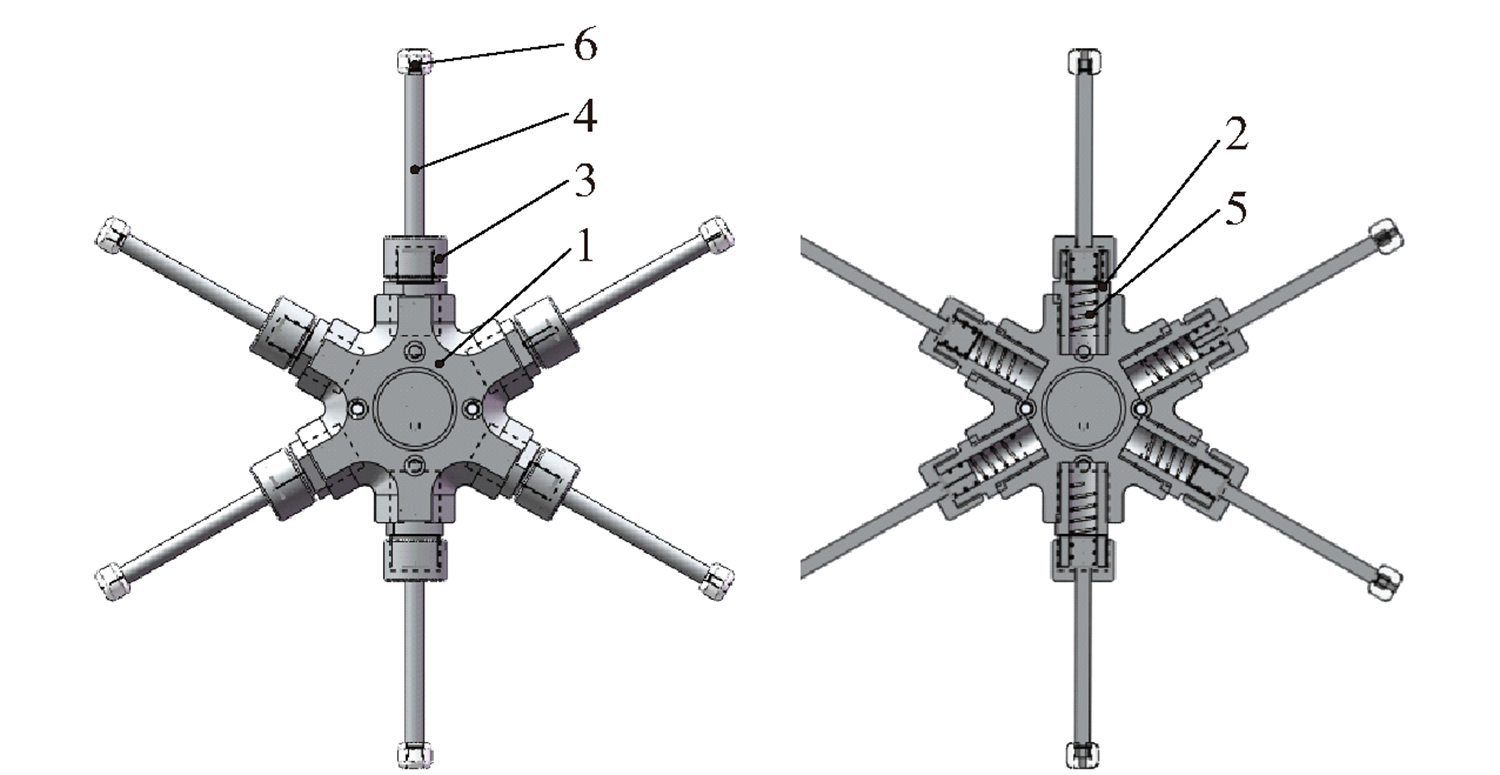
图3 六轮幅轮腿结构图
Fig.3 Structure diagram of the six-spoke wheel-leg
| 参数 | 数值 |
|---|---|
| 长度/mm | 696 |
| 宽度/mm | 370 |
| 轴距/mm | 350 |
| 轮距/mm | 340 |
| 轮腿长度/mm | 173 |
| 弹簧刚度系数/(N·m-1) | 2500 |
| 弹簧阻尼系数(N·s·m-1) | 800 |
表1 六轮幅轮腿机器人基本参数
Table 1 Parameters of the six-spoke wheel-leg robot
| 参数 | 数值 |
|---|---|
| 长度/mm | 696 |
| 宽度/mm | 370 |
| 轴距/mm | 350 |
| 轮距/mm | 340 |
| 轮腿长度/mm | 173 |
| 弹簧刚度系数/(N·m-1) | 2500 |
| 弹簧阻尼系数(N·s·m-1) | 800 |
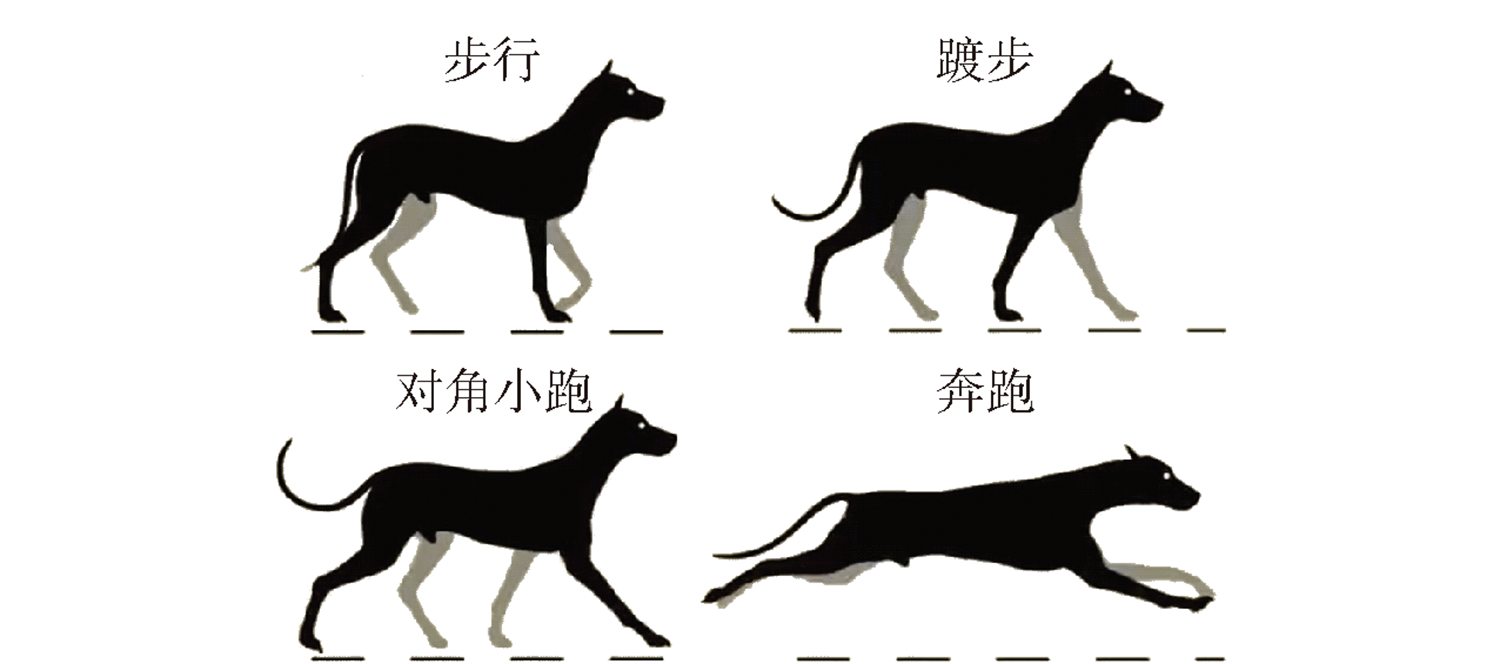
图4 四足动物步态
Fig.4 Quadruped gait
| 步态 | 轮腿关系 |
|---|---|
| 对角 | 对角线上轮腿相位一致,同轴轮腿有相位差 |
| 同侧 | 同侧轮腿相位一致,同轴轮腿有相位差 |
| 前后 | 同轴轮腿相位一致,同侧轮腿有相位差 |
| 滚动 | 四轮腿相位一致 |
表2 机器人步态特征
Table 2 Gait characteristics of the robot
| 步态 | 轮腿关系 |
|---|---|
| 对角 | 对角线上轮腿相位一致,同轴轮腿有相位差 |
| 同侧 | 同侧轮腿相位一致,同轴轮腿有相位差 |
| 前后 | 同轴轮腿相位一致,同侧轮腿有相位差 |
| 滚动 | 四轮腿相位一致 |
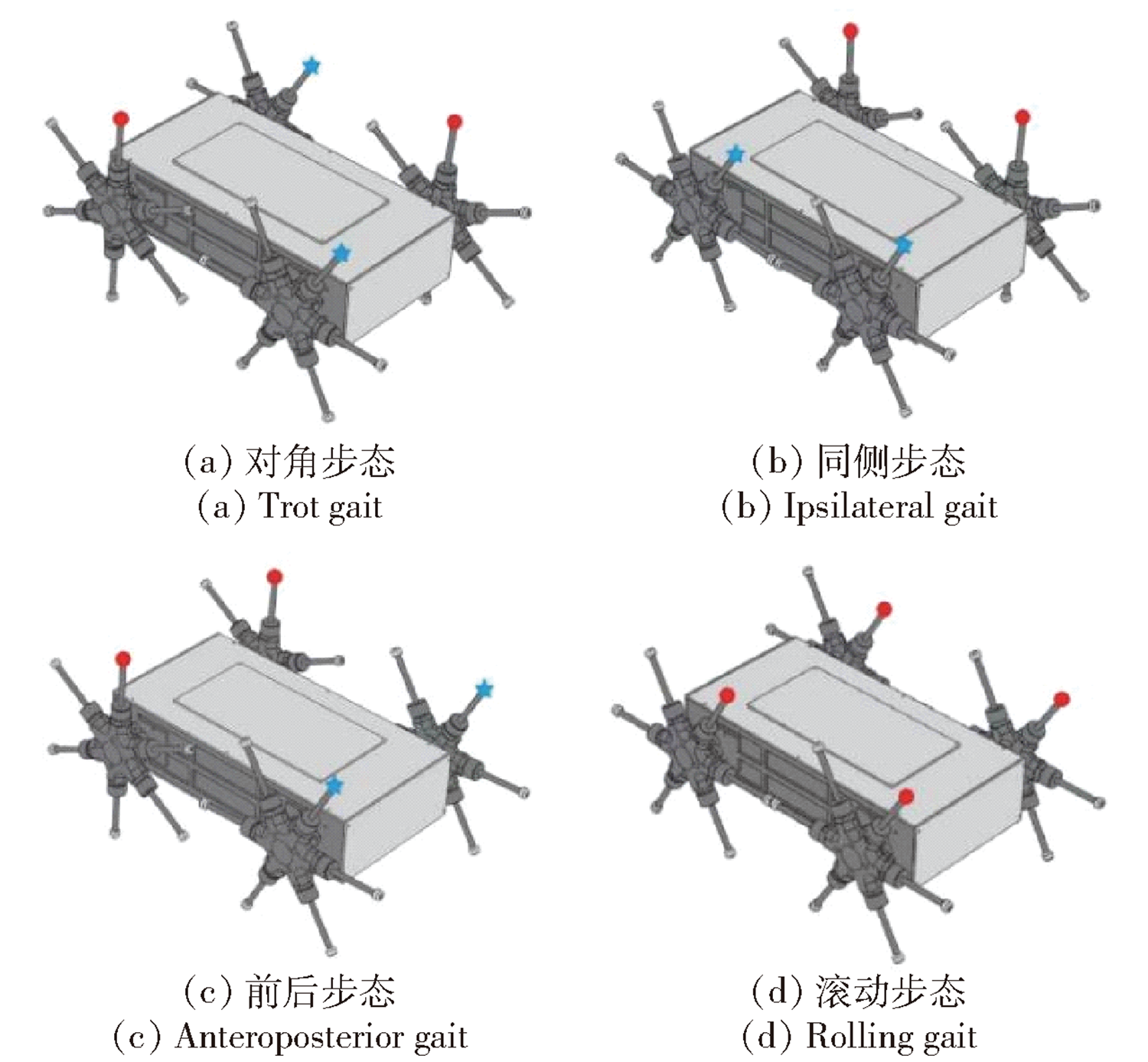
图5 机器人运动步态
Fig.5 Robot gaits

图6 单轮腿结构受力分析(左为轮腿受力模型图,右为轮腿力和力矩平衡图)
Fig.6 Force analysis of a single wheel-leg (lift: the model diagram of wheel-leg force, right: the balance diagram of wheel-leg force and moment)
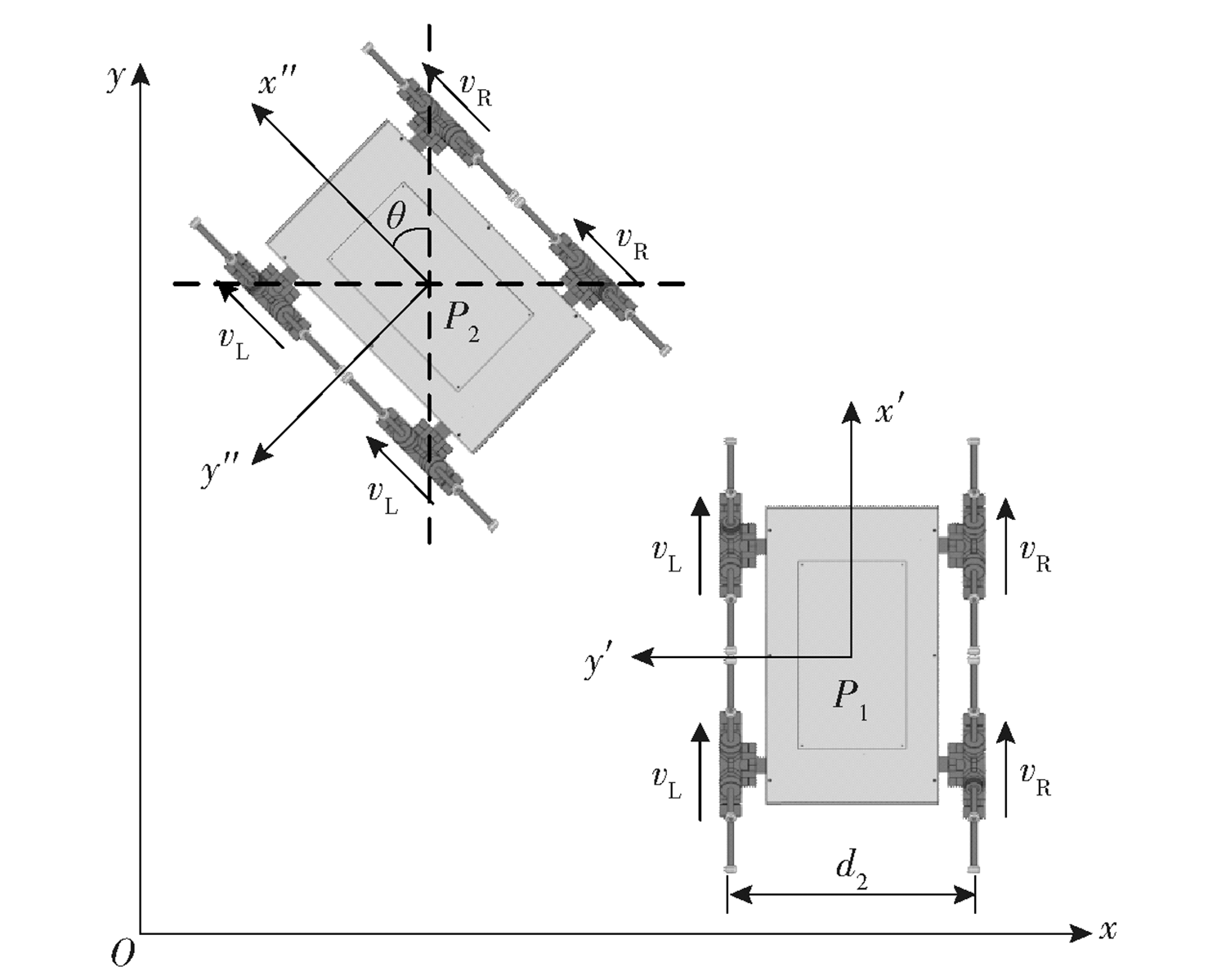
图7 机器人差速转向模型示意图
Fig.7 Schematic diagram of the differential steering model of the robot
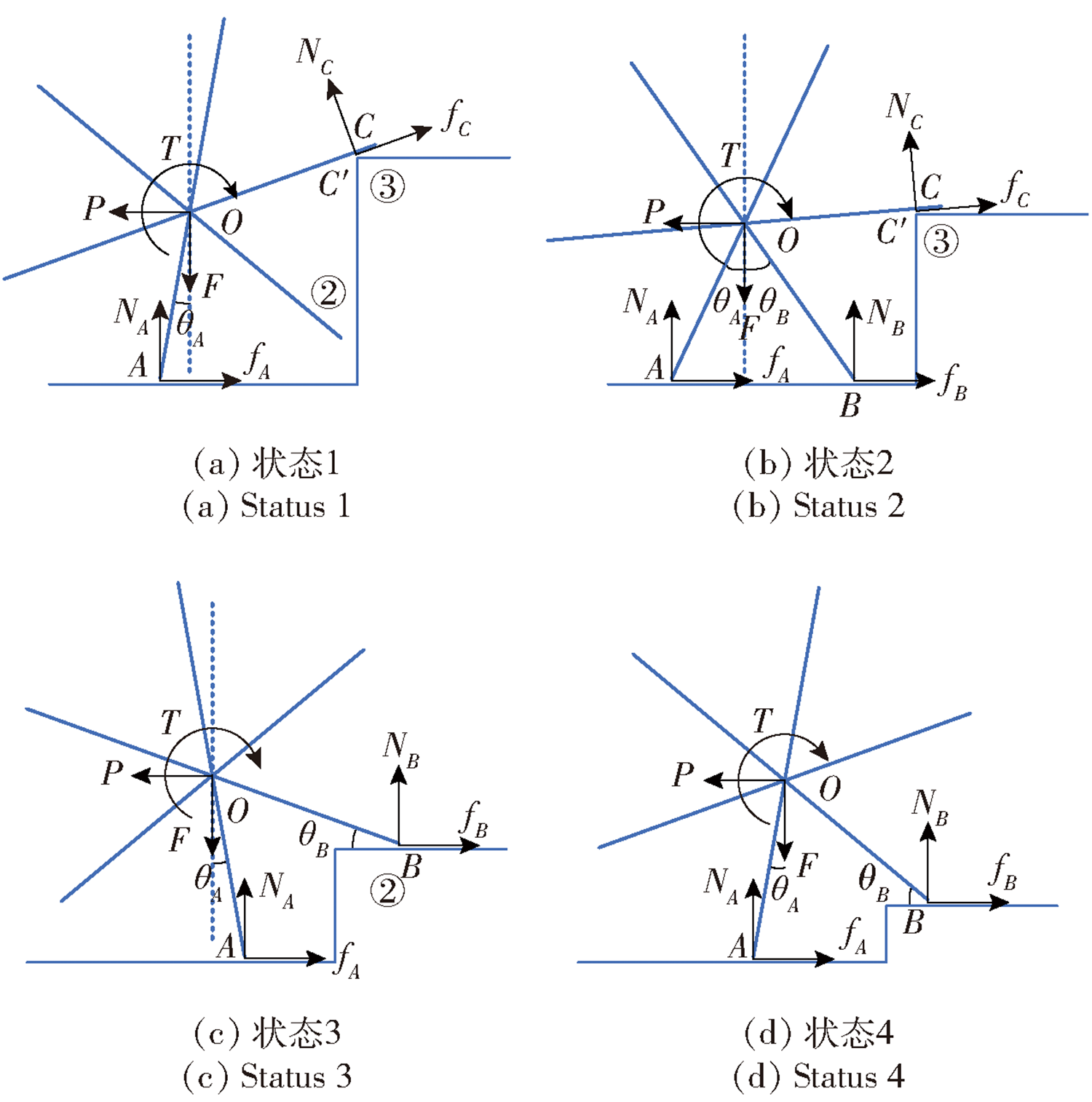
图8 单轮腿结构爬梯受力分析
Fig.8 Force analysis of a single wheel-leg climbing steps
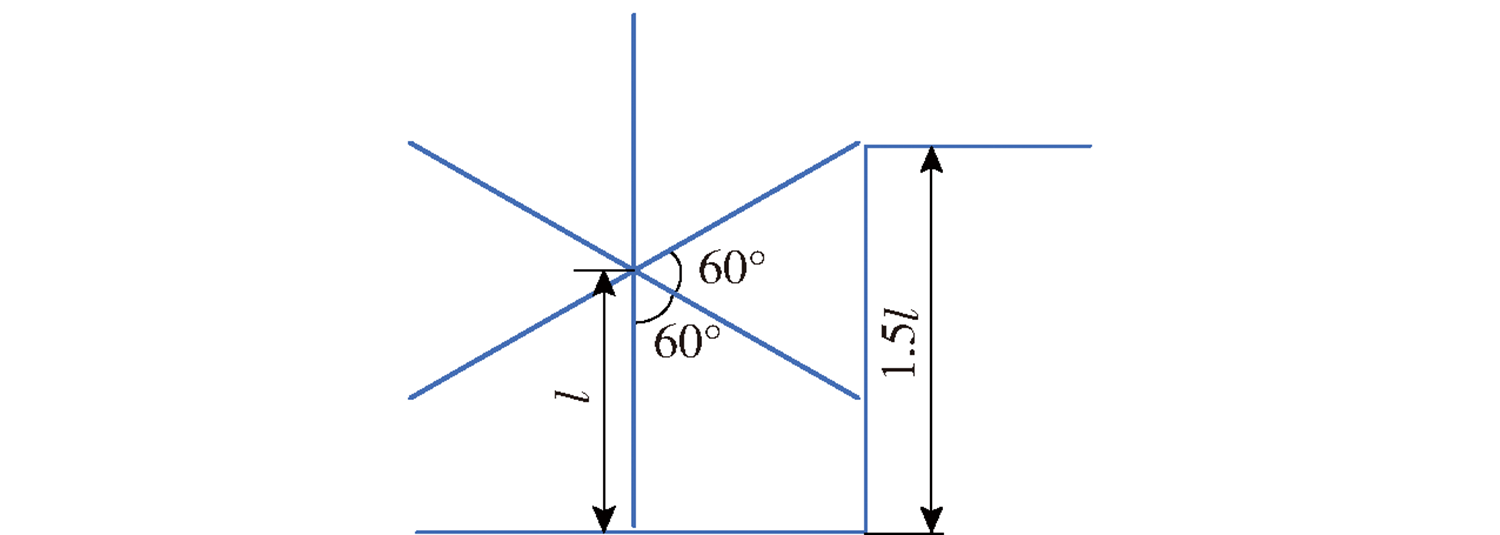
图9 轮腿越障高度分析
Fig.9 Analysis of obstacle-surmounting height of the wheel-leg
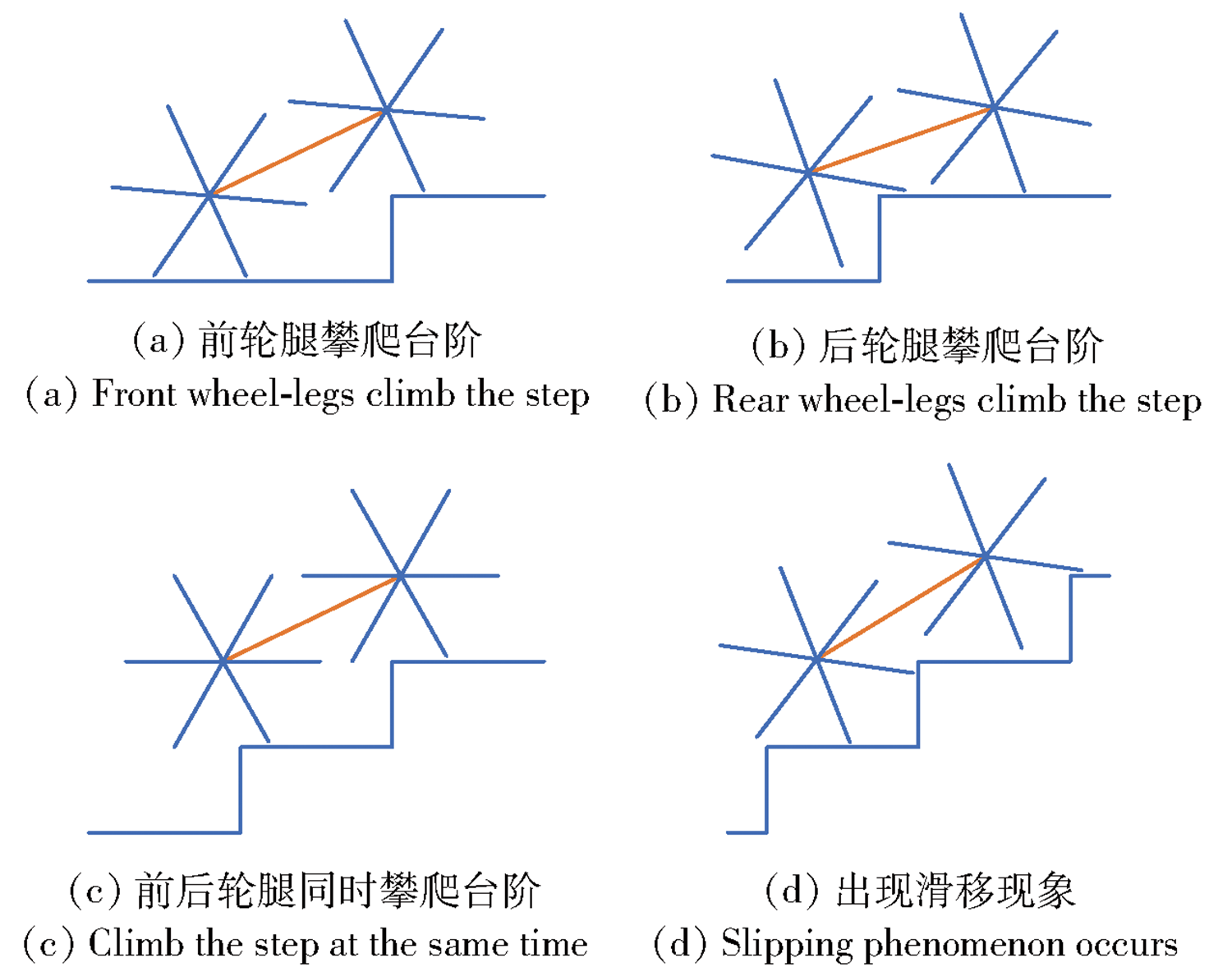
图10 滚动步态下机器人爬台阶过程
Fig.10 Robot stair climbing process under rolling gait
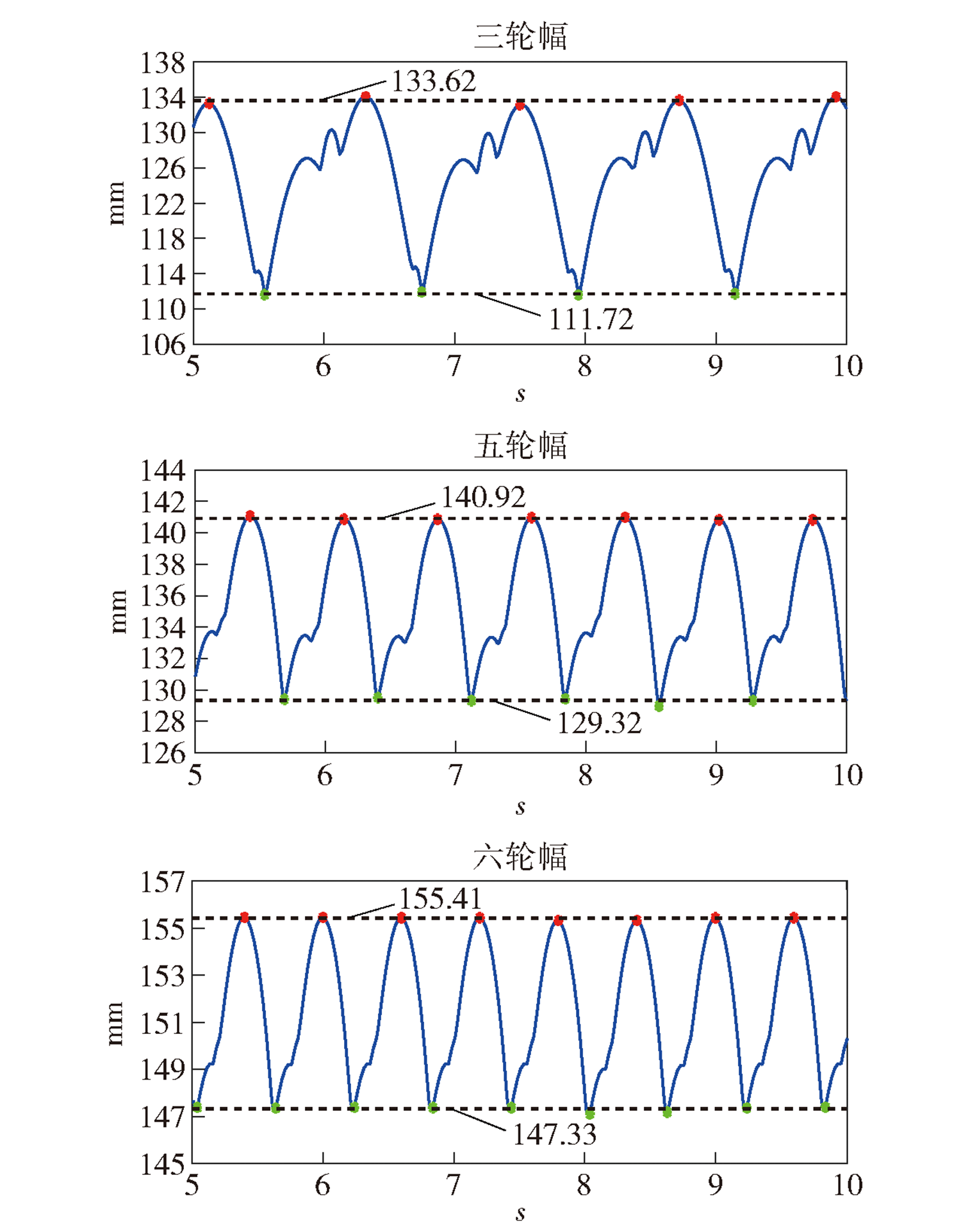
图11 对角步态下机器人直行质心变化曲线
Fig.11 Robot centroid change curve of straight ahead under diagonal gait
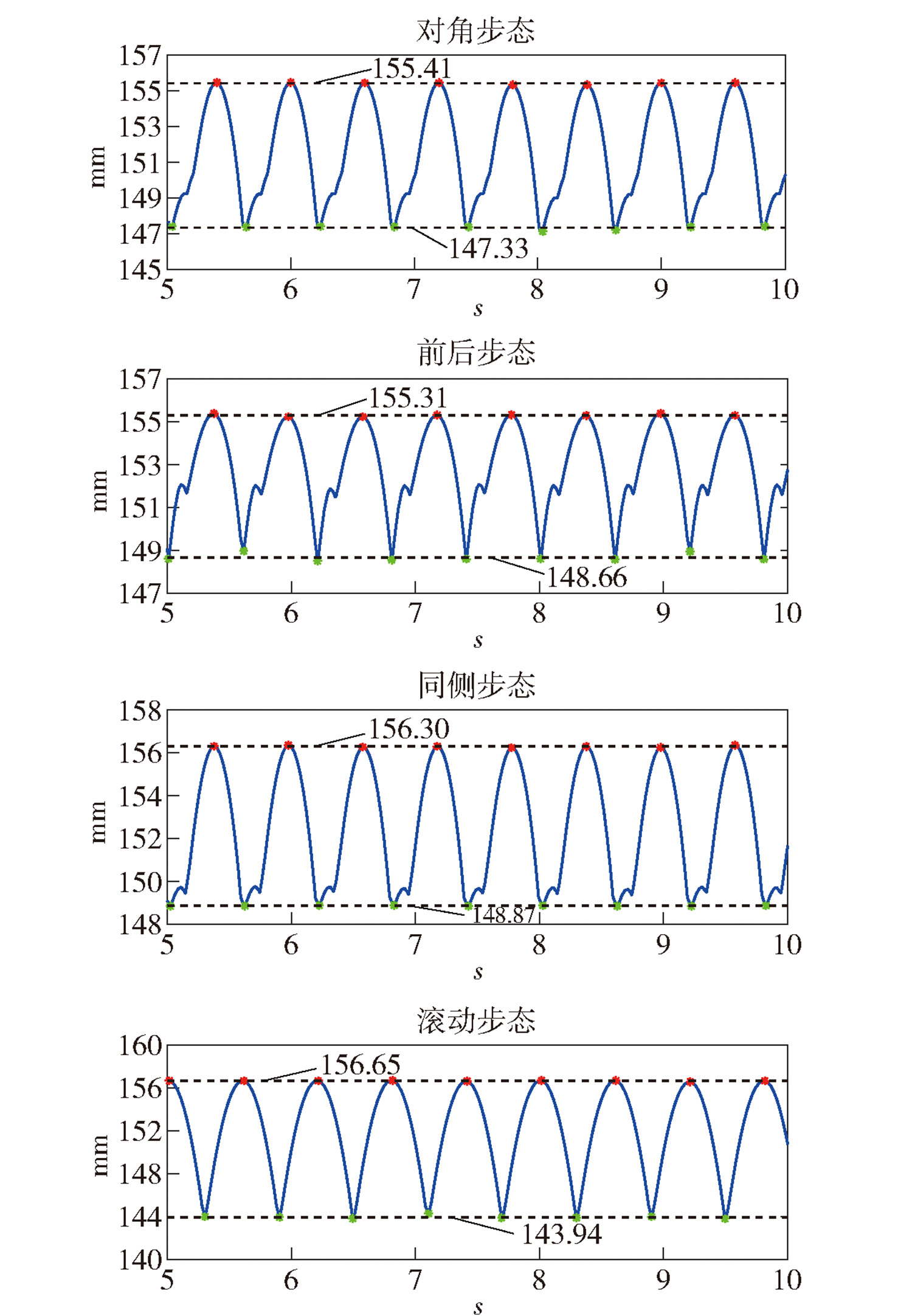
图12 机器人直行质心变化曲线
Fig.12 Cuve of the robot’s centroid change under straight walking condition
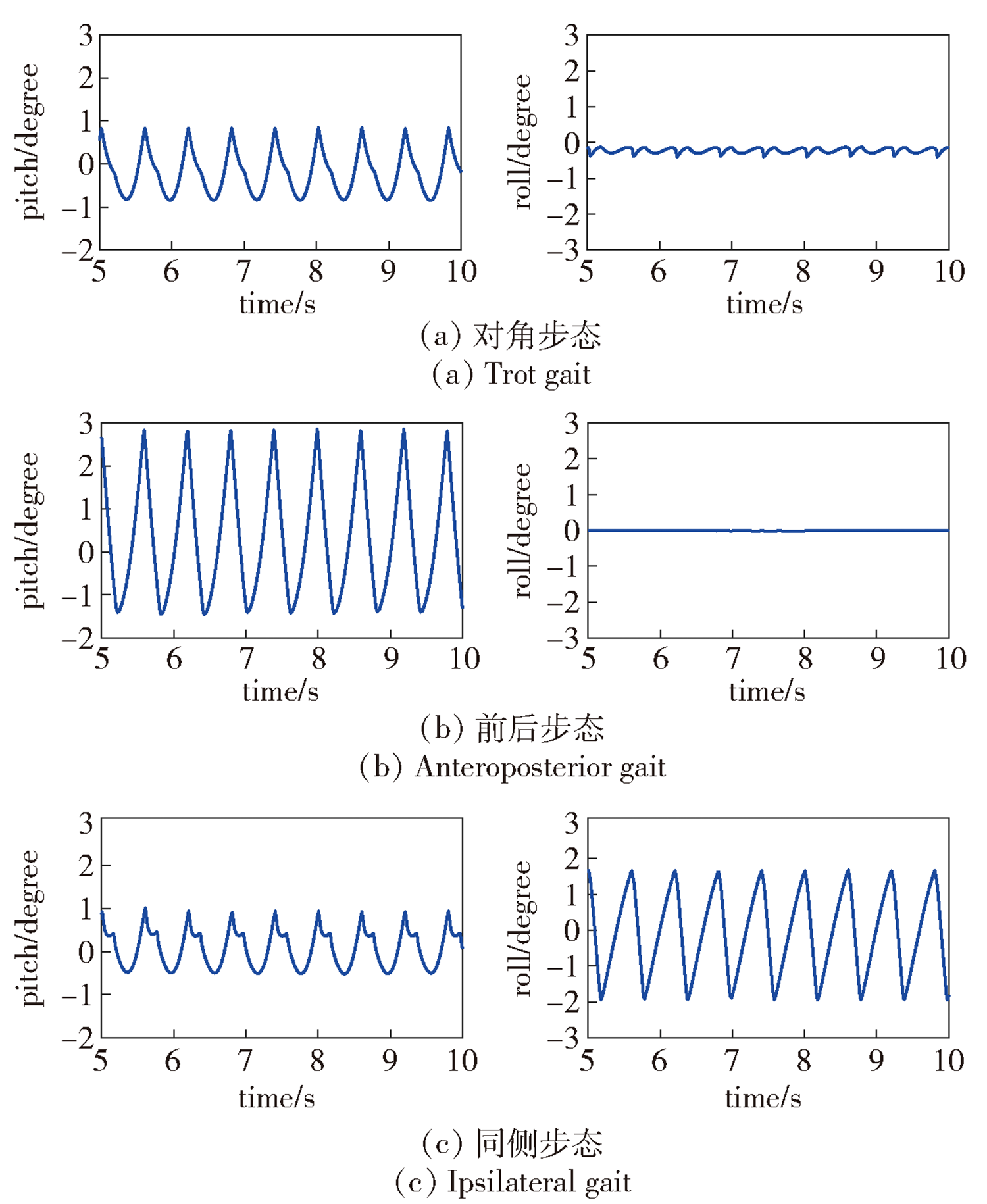
图13 机器人直行姿态变化曲线
Fig.13 Curve of the robot’s attitude change under straight walking condition
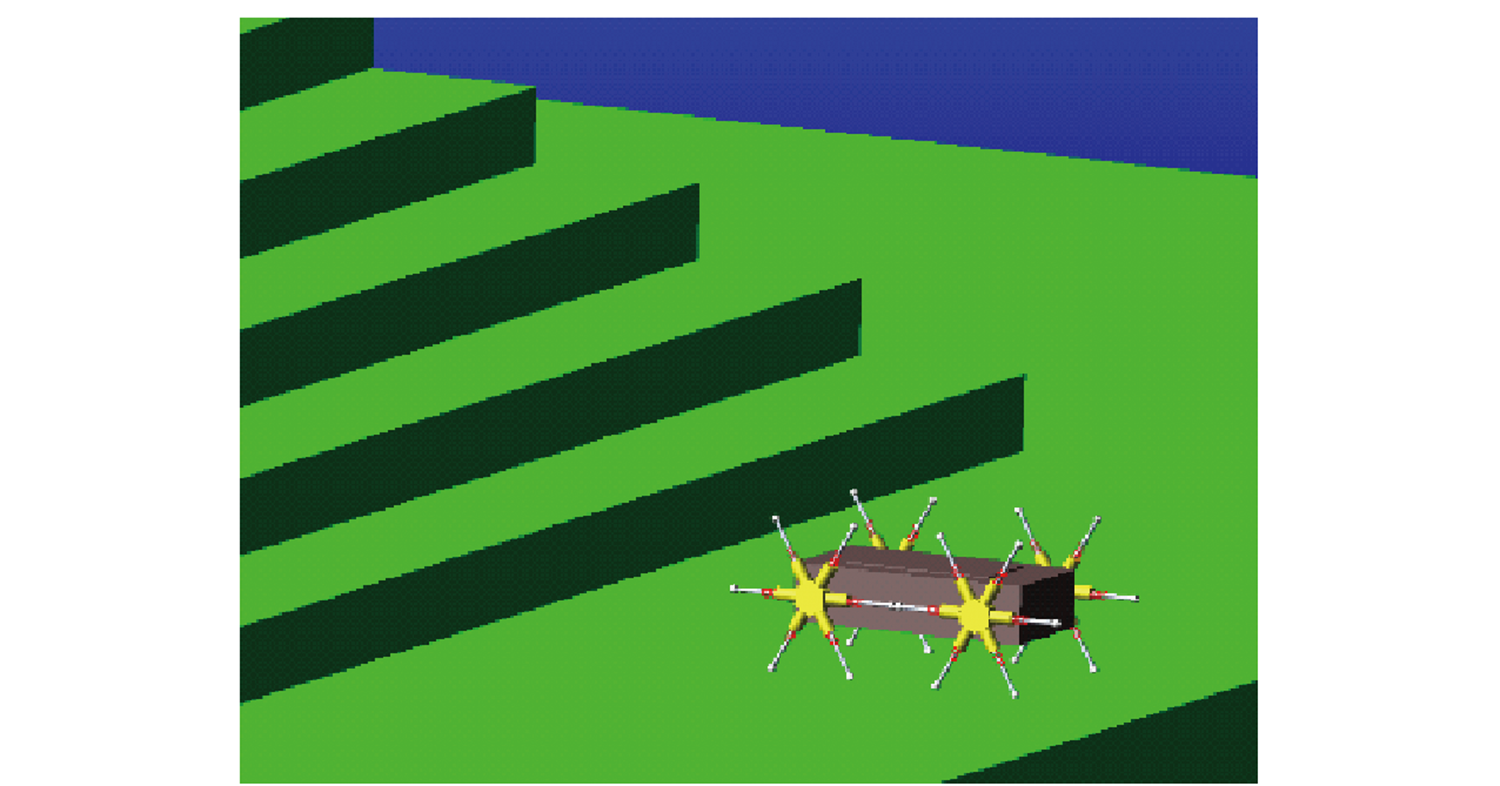
图14 机器人ADAMS软件仿真图
Fig.14 Simulation of the robot based on ADAMS software

图15 机器人爬台阶仿真图
Fig.15 Simulation of the robot climbing stairs
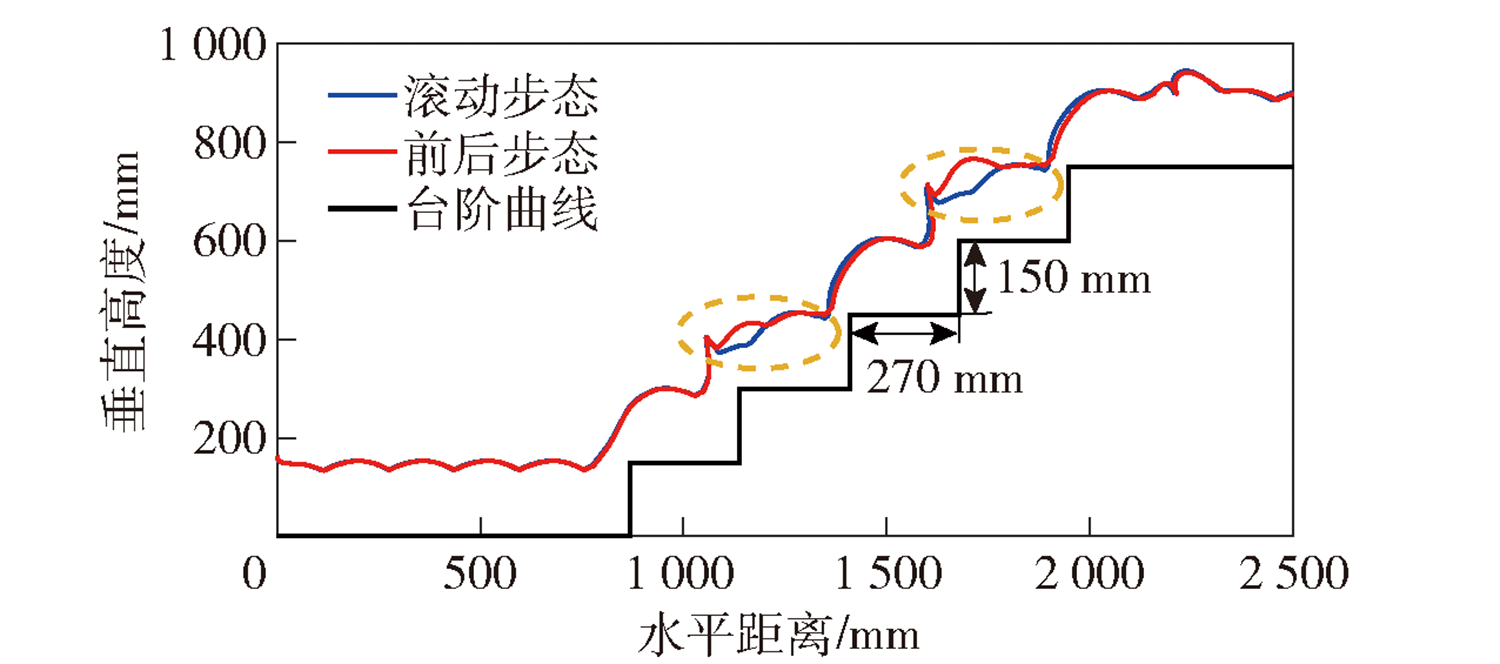
图16 机器人爬台阶质心变化曲线
Fig.16 Curve of the robot’s centroid change when climbing stairs
| 台阶高度/mm | 台阶宽度/mm | 通过性 |
|---|---|---|
| 175 | 260 | 通过 |
| 175 | 300 | 通过 |
| 175 | 350 | 通过 |
| 150 | 260 | 通过 |
| 150 | 300 | 通过 |
| 150 | 350 | 通过 |
| 125 | 260 | 通过 |
| 125 | 300 | 通过 |
| 125 | 350 | 通过 |
表3 台阶实验结果
Table 3 Stairs experiment results
| 台阶高度/mm | 台阶宽度/mm | 通过性 |
|---|---|---|
| 175 | 260 | 通过 |
| 175 | 300 | 通过 |
| 175 | 350 | 通过 |
| 150 | 260 | 通过 |
| 150 | 300 | 通过 |
| 150 | 350 | 通过 |
| 125 | 260 | 通过 |
| 125 | 300 | 通过 |
| 125 | 350 | 通过 |
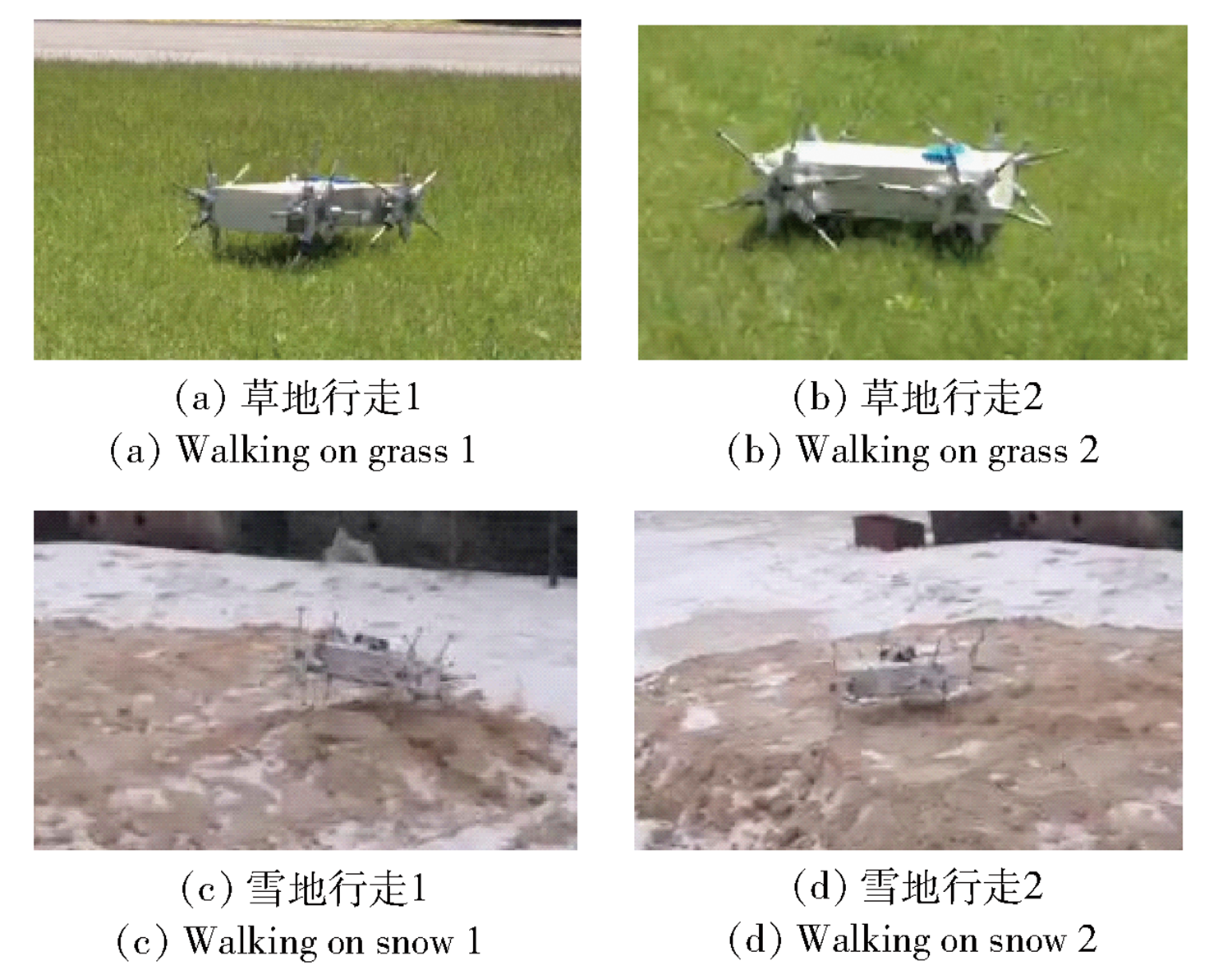
图17 机器人复杂地面环境实验
Fig.17 Experiment of the robot in complex terrain

图18 机器人爬台阶实验
Fig.18 Experiment of the robot climbing stairs
| [1] |
王鸿鹏, 杨云, 刘景泰. 高速移动机器人的研究现状与发展趋势[J]. 自动化与仪表, 2011, 26(12): 1-4.
|
|
|
|
| [2] |
doi: 10.1007/s00542-017-3424-7 URL |
| [3] |
|
| [4] |
王琪, 张秀丽, 江磊, 等. 具有2DOF铰接式躯干的仿猎豹四足奔跑机器人[J]. 机器人, 2022, 44(3): 257-266.
doi: 10.13973/j.cnki.robot.210101 |
|
doi: 10.13973/j.cnki.robot.210101 |
|
| [5] |
郭非, 汪首坤, 王军政. 轮足复合移动机器人运动规划发展现状及关键技术分析[J]. 控制与决策, 2022, 37(6): 1433-1444.
|
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
曲梦可, 王洪波, 荣誉. 军用轮、 腿混合四足机器人设计[J]. 兵工学报, 2018, 39(4): 787-797.
doi: 10.3969/j.issn.1000-1093.2018.04.019 |
|
|
|
| [10] |
|
| [11] |
田润, 宋轶民, 孙涛, 等. 一种新型轮腿式移动机器人的参数设计与实验研究[J]. 机器人, 2015, 37(5): 538-545.
doi: 10.13973/j.cnki.robot.2015.0538 |
|
doi: 10.13973/j.cnki.robot.2015.0538 |
|
| [12] |
|
| [13] |
|
| [14] |
杨帆, 吴贺利, 罗晨晖. 一种轮腿式越障机器人的设计与分析[J]. 机械传动, 2017, 41(5): 198-203.
|
|
|
|
| [15] |
|
| [16] |
doi: 10.1109/TRO.2014.2365651 URL |
| [17] |
王银浩, 颉潭成, 徐彦伟, 等. 四足机器人侧摆型trot步态的运动学分析及仿真研究[J]. 现代制造工程, 2022(5): 24-29.
|
|
|
|
| [18] |
孟健, 李贻斌, 李彬. 四足机器人跳跃步态控制方法[J]. 山东大学学报:工学版, 2015, 45(3): 28-34.
|
|
|
|
| [19] |
李姗姗, 王洪波, 陈建宇, 等. 新型四足并联军用机器人步态控制算法及仿真研究[J]. 兵工学报, doi: 10.12382/bgxb.2021.0796.
doi: 10.12382/bgxb.2021.0796 |
|
doi: 10.12382/bgxb.2021.0796 |
|
| [20] |
芮宏斌, 李路路, 曹伟, 等. 轮-履-腿复合仿生机器人步态规划及越障性能分析[J]. 工程设计学报, 2022, 29(2): 133-142.
|
|
|
|
| [21] |
张楠, 姜文通, 牛宝山, 等. 轮腿式自动引导小车结构设计与行走步态规划[J]. 机械科学与技术, 2021, 40(2): 211-217.
|
|
|
| [1] | 张雪雪, 薛智华, 聂洪奇, 严启龙. 含能燃速抑制剂的制备及其对AP分解的负催化效应[J]. 兵工学报, 2024, 45(1): 15-25. |
| [2] | 陈柏翰, 沈子楷, 邹慧辉, 王伟光, 王可慧. 硬目标内弹体斜侵彻状态的基本演化特性[J]. 兵工学报, 2023, 44(S1): 59-66. |
| [3] | 陈柏翰, 王笠镔, 邹慧辉, 王伟光, 王可慧. 自旋对弹体侵彻效应的影响[J]. 兵工学报, 2023, 44(S1): 117-124. |
| [4] | 李东阳, 常思江, 王中原. 弹箭角运动的非线性吸引域估计[J]. 兵工学报, 2023, 44(8): 2329-2341. |
| [5] | 宋金超, 赵良玉. 采用弹体追踪导引律的旋转弹锥形运动稳定性[J]. 兵工学报, 2023, 44(6): 1795-1808. |
| [6] | 郗雪辰, 杨鹏飞, 王宽亮. 非均匀氢气/空气混合物中一维爆轰波的振荡特性[J]. 兵工学报, 2023, 44(4): 982-993. |
| [7] | 赵焕娟, 刘克庆, 庞磊, 刘婧, 林敏, 董士铭. 爆轰不稳定性及初始压力对螺旋爆轰轨迹角的影响[J]. 兵工学报, 2023, 44(4): 1086-1096. |
| [8] | 尚哲, 王挺, 徐瑶, 吴英彪, 邵沛瑶, 邵士亮. 六轮摇臂移动机器人结构设计与越障动力学研究[J]. 兵工学报, 2023, 44(11): 3478-3488. |
| [9] | 徐浩轩, 马晓军, 刘春光. 混合动力装甲车直流微电网大信号稳定性分析[J]. 兵工学报, 2023, 44(1): 108-116. |
| [10] | 沈忱, 闫石, 姚杰, 焦清介, 廖明义, 常云飞. 液态氟橡胶改性端羟基嵌段共聚醚粘合剂及其对铝粉热氧化行为的影响[J]. 兵工学报, 2022, 43(4): 780-787. |
| [11] | 钱林方, 陈光宋, 林通, 刘太素. 车载炮底盘载荷分离设计技术[J]. 兵工学报, 2022, 43(11): 2773-2784. |
| [12] | 周建平, 李威, 温求遒, 夏群利, 姜欢. 考虑滚仰导引头寄生回路的旋转导弹驾驶仪稳定性设计[J]. 兵工学报, 2022, 43(1): 1-10. |
| [13] | 单春来, 刘朋科, 古斌, 贺琦, 徐宏英. 多级优化算法在火炮总体结构设计中的应用[J]. 兵工学报, 2022, 43(1): 11-19. |
| [14] | 杨杰, 常思江, 魏伟. 带扰流片旋转稳定弹动态稳定性[J]. 兵工学报, 2021, 42(8): 1613-1623. |
| [15] | 马彬, 于宪锋, 黄正祥, 贾鑫, 祖旭东, 肖强强. 强磁场对聚能射流稳定性作用机制[J]. 兵工学报, 2021, 42(7): 1345-1352. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4