
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (1): 233-246.doi: 10.12382/bgxb.2021.0849
所属专题: 特种车辆理论与技术
张瑞增, 龚建伟, 陈慧岩*( ), 刘海鸥, 卢佳兴
), 刘海鸥, 卢佳兴
收稿日期:2021-12-16
上线日期:2022-07-12
通讯作者:
ZHANG Ruizeng, GONG Jianwei, CHEN Huiyan*(), LIU Haiou, LU Jiaxing
Received:2021-12-16
Online:2022-07-12
摘要:
履带车辆与地面之间的作用关系复杂,基于地面剪切位移的方法通常会用到对时间和位置的积分,模型较为复杂,无法直接应用到车辆的实时控制算法中。通常情况下,履带车辆转向分析会将接地压力看作连续线性分布或者多矩形分布,但是试验和计算结果均表明硬质土壤条件下,履带接地压力为多峰值分布,前述两种分布均不能体现接地压力的真实状态。本文针对上述问题,在前人研究的基础上,对履带接地压力分布进行求解,提出了履带车辆接地压力简化模型。该简化模型更符合硬质路面履带接地压力的真实状态,并被应用于履带车辆转向动力学分析与验证。利用J.Y.Wong提出的垂向负载-剪切位移变化关系解决了垂向压力变化的同时剪切位移计算的问题,提出了履带车辆转向分析模型(以下简称分析模型),试验结果表明该模型有较高的精度。但是其复杂度仍然较高,为了进一步简化模型,借鉴轮式车辆轮胎侧偏角和滑转率的概念,利用履带车辆履带-地面剪切位移关系推导了简化履带车辆动力学模型(以下简称简化模型)。该模型避免了复杂的积分或者求和,显著降低了履带车辆动力学模型的复杂度,能够应用于基于模型的无人驾驶履带车辆轨迹控制方法中,且模型精度接近前述履带车辆转向分析模型。
中图分类号:
张瑞增, 龚建伟, 陈慧岩, 刘海鸥, 卢佳兴. 硬质路面条件下履带车辆转向模型分析及验证[J]. 兵工学报, 2023, 44(1): 233-246.
ZHANG Ruizeng, GONG Jianwei, CHEN Huiyan, LIU Haiou, LU Jiaxing. Turning Model for Tracked Vehicles on Hard Ground: Analysis and Verification[J]. Acta Armamentarii, 2023, 44(1): 233-246.
图1 履带土壤接触变形简图
Fig.1 Track-ground contact deformation
图2 余弦曲线拟合内侧负重轮接地压力效果
Fig.2 Curve fitting of track-ground pressure on the middle road wheel
图3 余弦曲线拟合两侧负重轮接地压力效果
Fig.3 Curve fitting of track-ground pressure on the outer road wheels on both sides
图4 集中载荷作用下的履带接地压力
Fig.4 Track-ground pressure under concentrated load
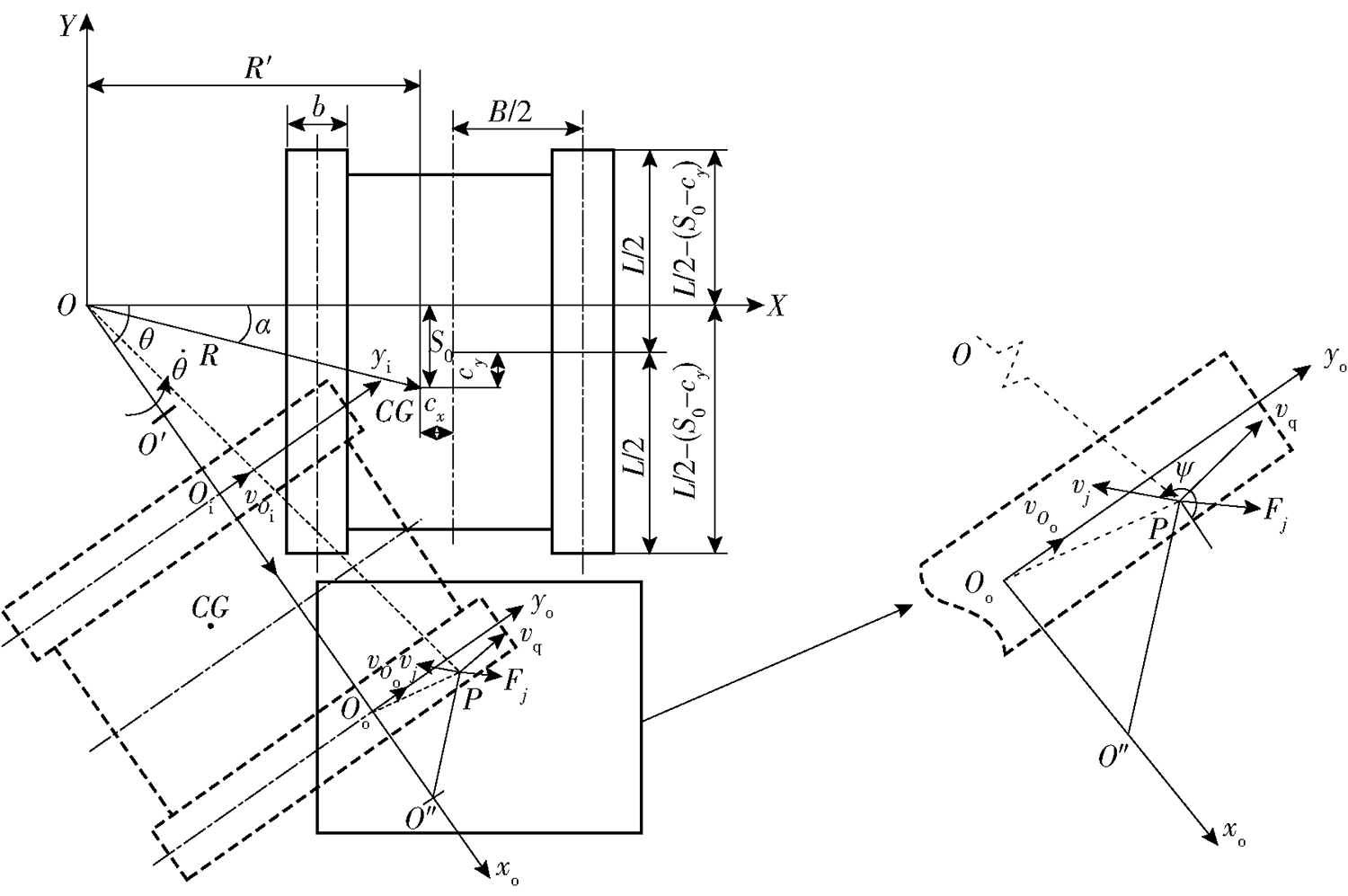
图5 车辆转向过程分析
Fig.5 Analysis of racked vehicle turning
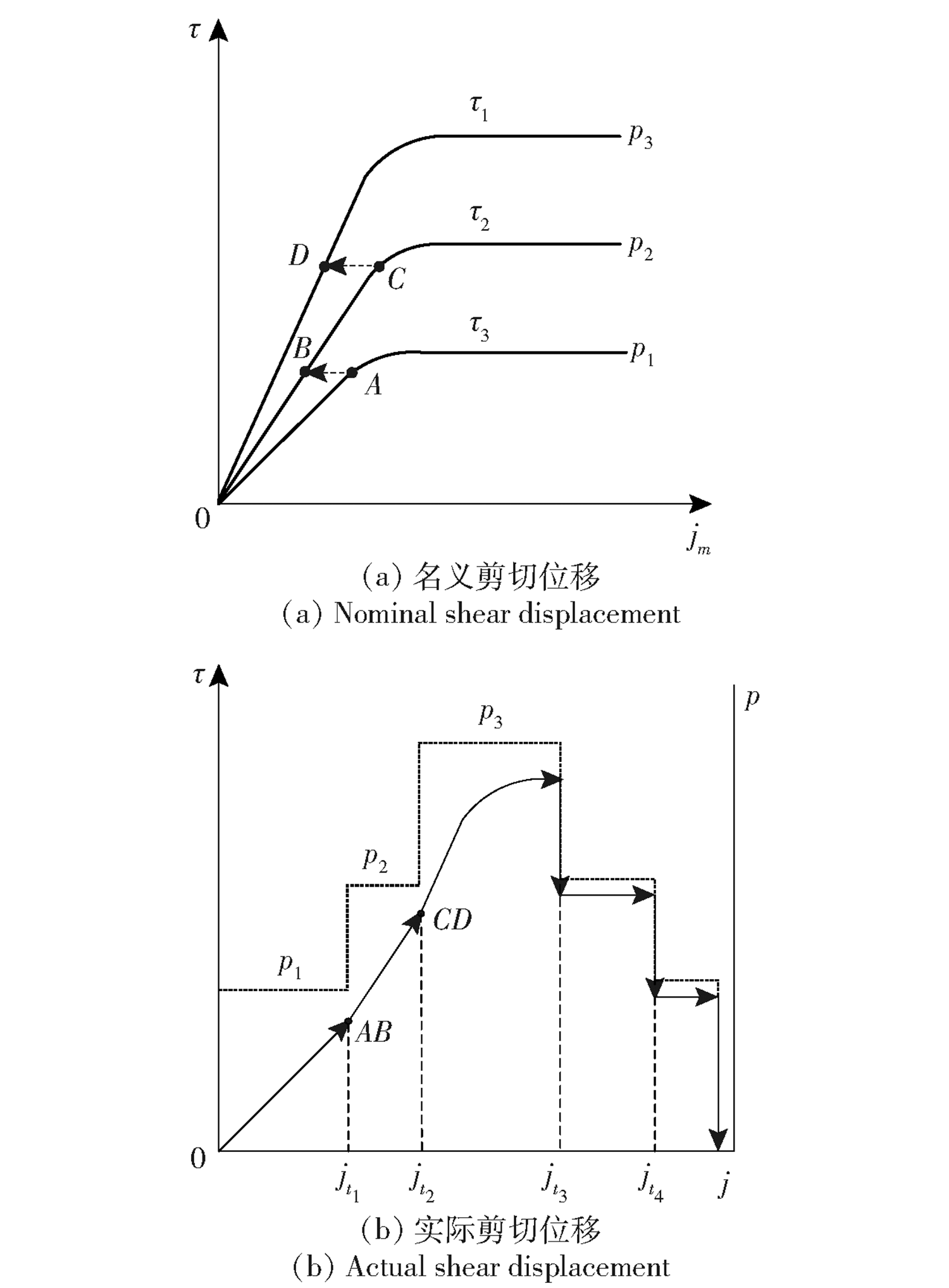
图6 垂向负载-剪切位移变化关系
Fig.6 Relationship between vertical load and shear displacement
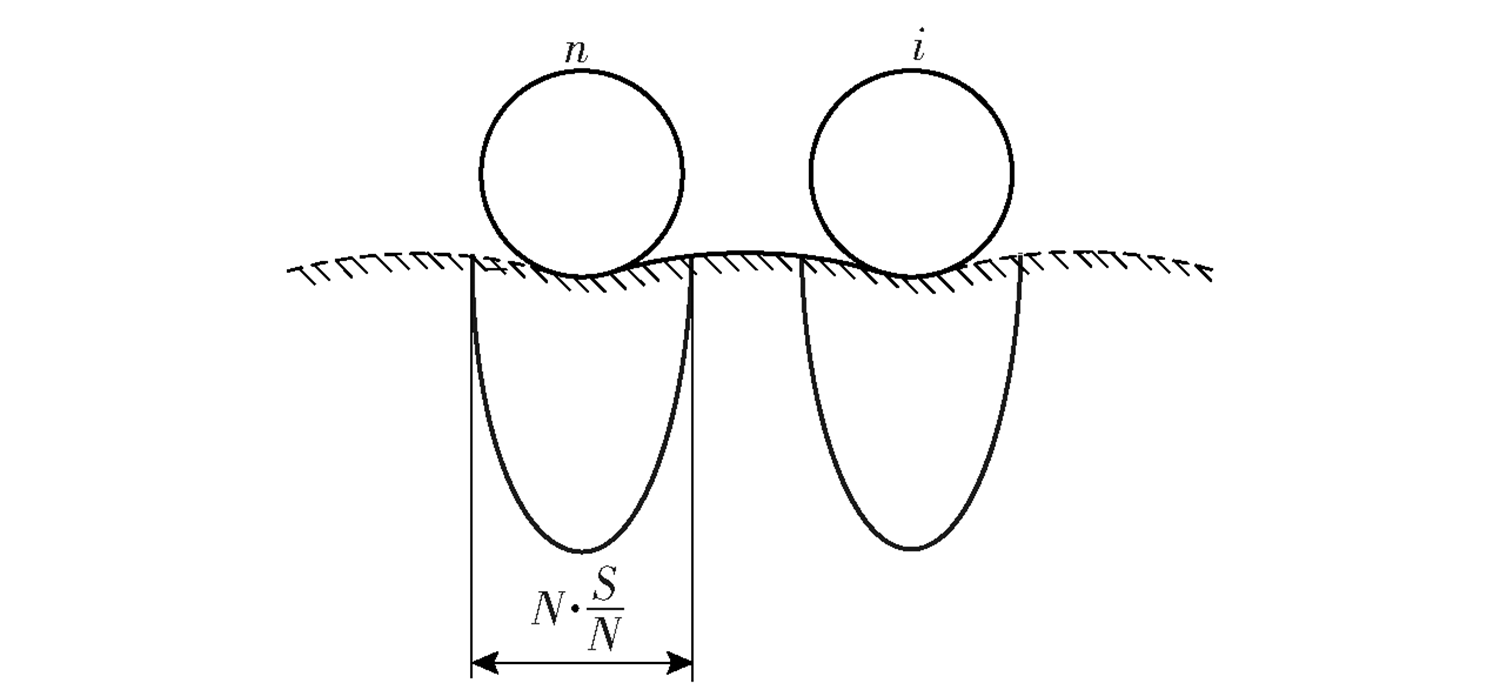
图7 履带微元划分
Fig.7 Infinitesimal analysis of a track
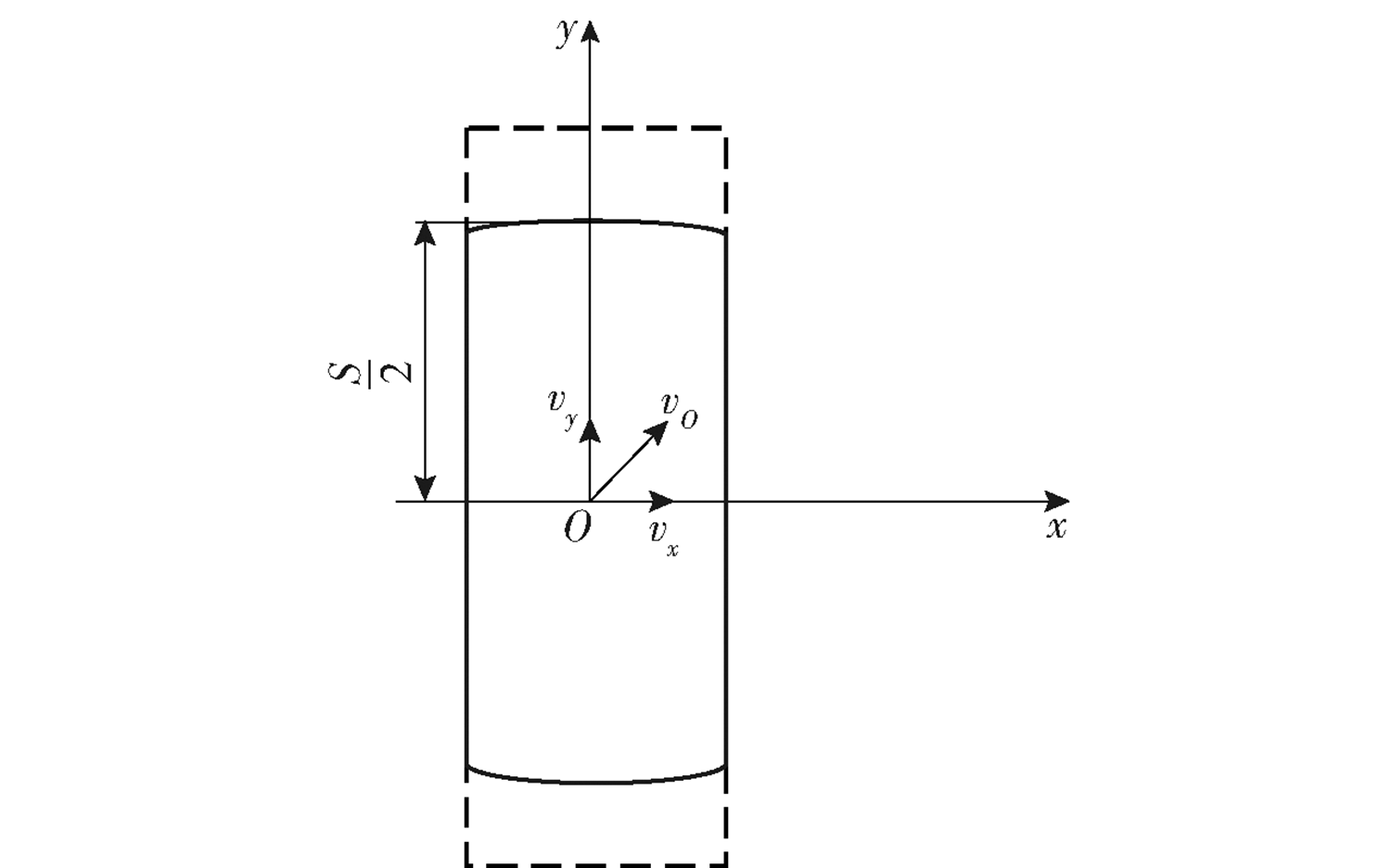
图8 单个负重轮下履带接地状态分析
Fig.8 Track-groundcontactanalysis for a single road wheel

图9 试验采集
Fig.9 Test conditions
| 参数 | 数值 |
|---|---|
| 总质量m/t | 9.66 |
| 履带中心距B/m | 2.464 |
| 履带接地长L/m | 3.095 |
| 履带接地宽度b/m | 0.365 |
| 主动轮半径r/m | 0.2654 |
| 负重轮数量n | 4 |
| 单侧驱动电机额定功率/kW | 75 |
| 单侧驱动电机峰值功率/kW | 110 |
| 转矩误差反馈/(N·m) | ≤10 |
| 组合导航系统差分定位误差/cm | ≤15 |
| 一挡传动效率/% | 92 |
| Z轴转动惯量(估计)J/(kg·m2) | 15800 |
| 一挡质量增加系数δ | 1.446 |
| 沙石/硬土/水泥路面摩擦因数μ | 0.99/0.95/0.55 |
| 沙石/硬土/水泥路面抗剪模量K/m | 0.008/0.0025/0.0018 |
| 沙石/硬土/水泥路面行驶阻力 系数f | 0.065~0.076/0.076/0.063 |
表1 试验相关参数
Table 1 Test parameters
| 参数 | 数值 |
|---|---|
| 总质量m/t | 9.66 |
| 履带中心距B/m | 2.464 |
| 履带接地长L/m | 3.095 |
| 履带接地宽度b/m | 0.365 |
| 主动轮半径r/m | 0.2654 |
| 负重轮数量n | 4 |
| 单侧驱动电机额定功率/kW | 75 |
| 单侧驱动电机峰值功率/kW | 110 |
| 转矩误差反馈/(N·m) | ≤10 |
| 组合导航系统差分定位误差/cm | ≤15 |
| 一挡传动效率/% | 92 |
| Z轴转动惯量(估计)J/(kg·m2) | 15800 |
| 一挡质量增加系数δ | 1.446 |
| 沙石/硬土/水泥路面摩擦因数μ | 0.99/0.95/0.55 |
| 沙石/硬土/水泥路面抗剪模量K/m | 0.008/0.0025/0.0018 |
| 沙石/硬土/水泥路面行驶阻力 系数f | 0.065~0.076/0.076/0.063 |
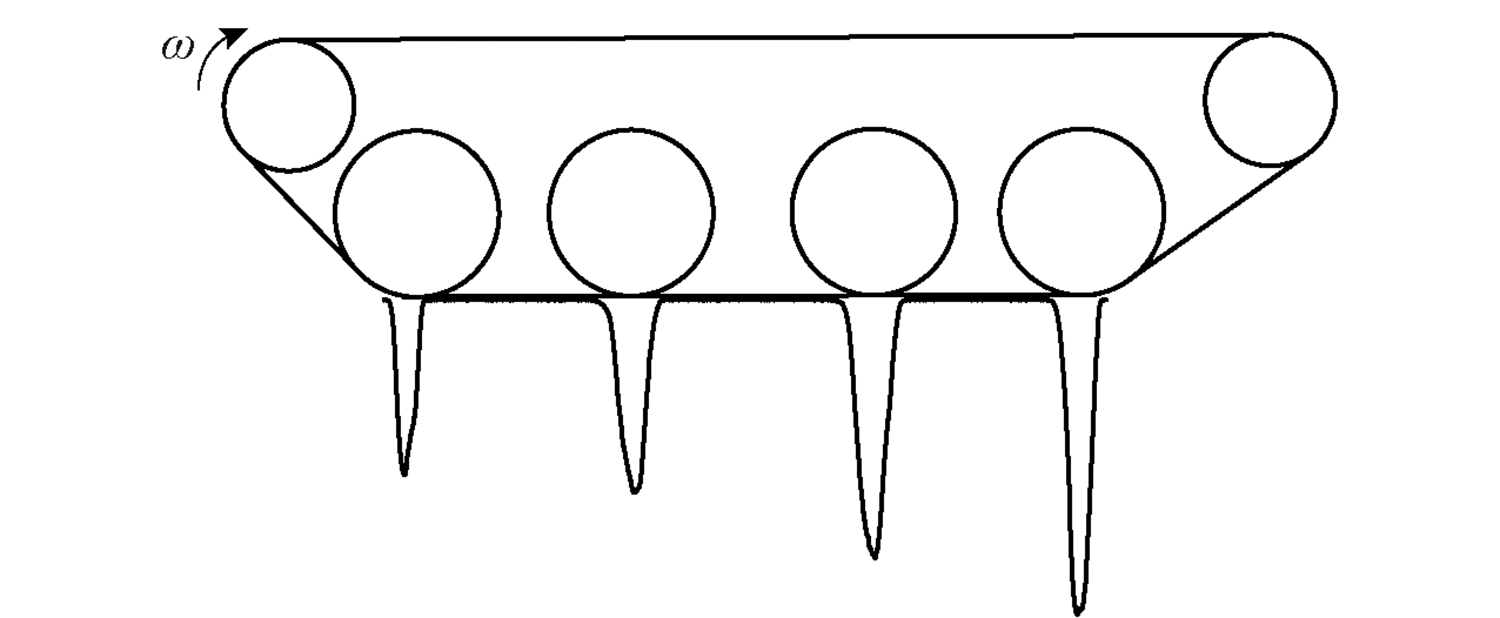
图10 履带接地压力定性测试结果
Fig.10 Qualitative test results of track-ground pressure
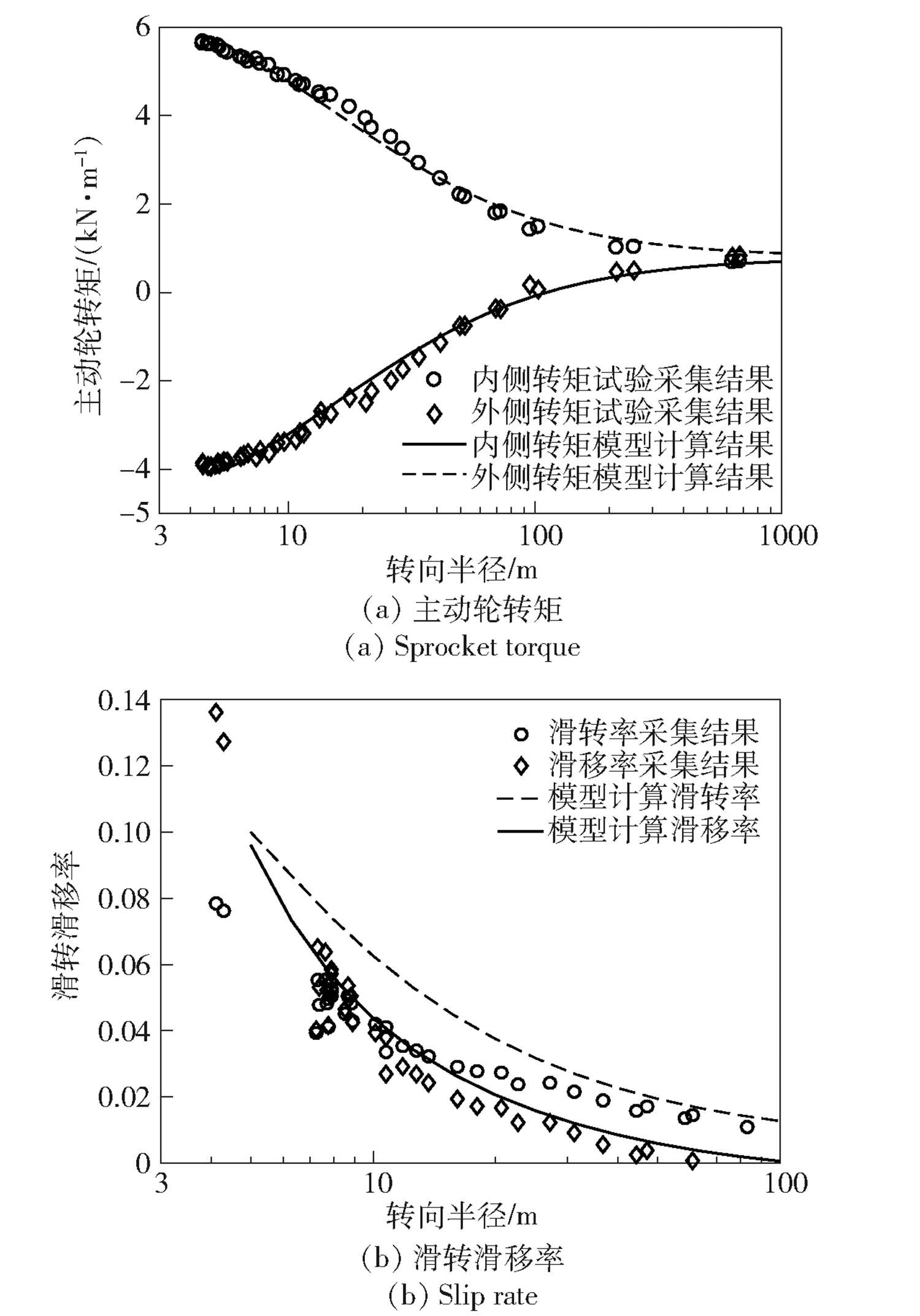
图11 砂石路面3km/h计算结果与试验采集结果对比
Fig.11 Comparison of calculation and test results on sand-gravel road at 3km/h
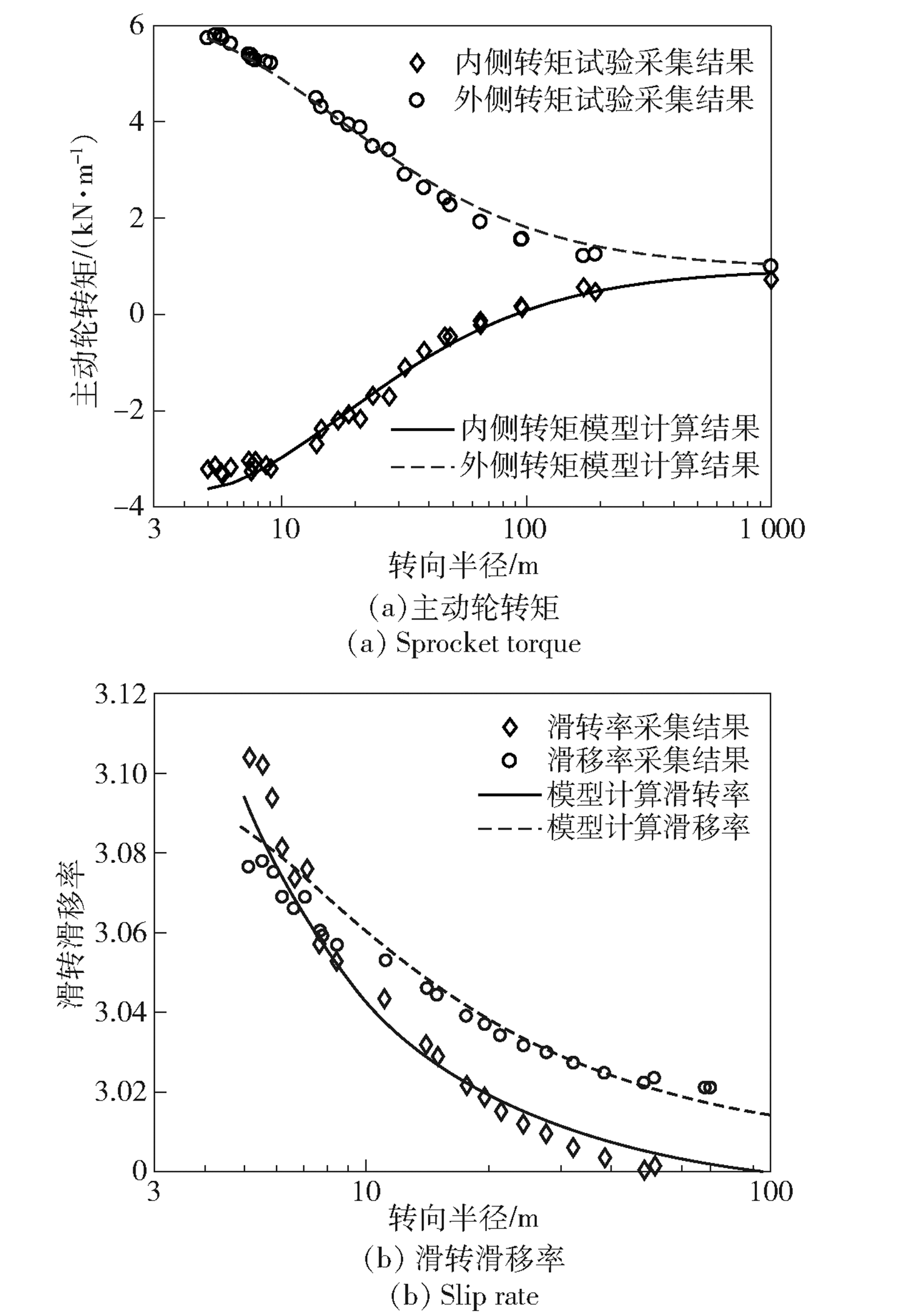
图12 砂石路面10km/h计算结果与试验采集结果对比
Fig.12 Comparison of calculation and test results on sand-gravel road at 10km/h

图13 砂石路面15km/h计算结果与试验采集结果对比
Fig.13 Comparison of calculation and test results on sand-gravel road at 15km/h
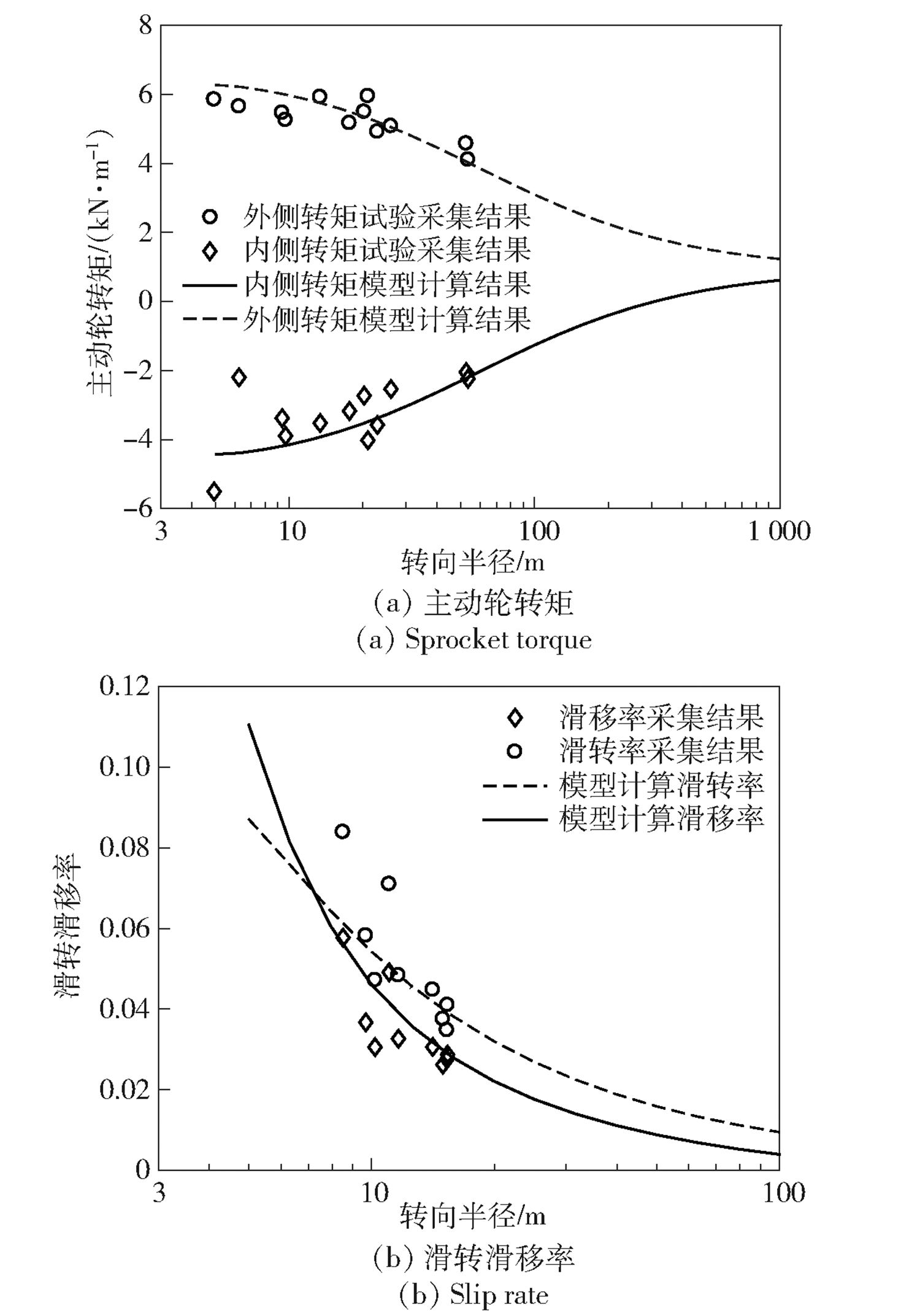
图14 硬质土路2.5~10.5km/h计算结果与试验采集结果对比
Fig.14 Comparison of calculation and test results on hard dirt road at 2.5~10.5km/h

图15 水泥路面3~8km/h计算结果与试验采集结果对比
Fig.15 Comparison of calculation and test results on cement road at 3~8km/h

图16 简化转向动力学模型砂石路面15km/h计算结果与试验采集结果对比
Fig.16 Comparison of calculation and test results on sand-gravel road at 15km/h using the simplified model
图17 简化转向动力学模型砂石路面10km/h计算结果与试验采集结果对比
Fig.17 Comparison of calculation and test results on sand-gravel road at 10km/h using the simplified model

图18 简化转向动力学模型砂石路面3km/h计算结果与试验采集结果对比
Fig.18 Comparison of calculation and test results on sand-gravel road at 3km/h using the simplified model
图19 砂石路面下存在纵向加速度时模型验证效果
Fig.19 Model verification effect during acceleration on sand-gravel road
| [1] |
|
| [2] |
|
| [3] |
诺维科夫. 坦克理论[M]. 北京: 国防工业出版社, 1956.
|
|
Novikov. Tank theory[M]. Beijing: National Defense Industry Press, 1956. (in Chinese)
|
|
| [4] |
doi: 10.1243/0954407011525683 URL |
| [5] |
|
| [6] |
|
| [7] |
王红岩, 王钦龙, 芮强, 等. 高速履带车辆转向过程分析与试验验证[J]. 机械工程学报, 2014, 50(16):162-172.
|
|
|
|
| [8] |
魏宸官. 履带车辆转向问题的研究[J]. 拖拉机, 1980(1):17-35.
|
|
|
|
| [9] |
余群. 地面机器系统的研究现状及展望[J]. 农业机械学报, 2000, 31(2):1-3,26.
|
|
|
|
| [10] |
芮强, 王红岩, 王钦龙, 等. 基于剪应力模型的履带车辆转向力矩分析与试验[J]. 兵工学报, 2015, 36(6):968-977.
doi: 10.3969/j.issn.1000-1093.2015.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2015.06.002 |
|
| [11] |
王红岩, 陈冰, 芮强, 等. 集中载荷作用下的履带车辆稳态转向分析与试验[J]. 兵工学报, 2016, 37(12):2196-2204.
doi: 10.3969/j.issn.1000-1093.2016.12.003 |
|
|
|
| [12] |
芮强, 王红岩, 王钦龙, 等. 履带车辆转向性能参数分析与试验研究[J]. 机械工程学报, 2015, 51(12):127-136.
doi: 10.3901/JME.2015.12.127 |
|
doi: 10.3901/JME.2015.12.127 |
|
| [13] |
doi: 10.1016/j.ymssp.2019.01.005 URL |
| [14] |
|
| [15] |
熊光明, 鲁浩, 郭孔辉, 等. 基于滑动参数实时估计的履带车辆运行轨迹预测方法研究[J]. 兵工学报, 2017, 38(3):600-607.
doi: 10.3969/j.issn.1000-1093.2017.03.025 |
|
|
|
| [16] |
梁文利, 陈慧岩, 王博洋. 基于独立电驱动履带车辆的地面参量估计方法研究[J]. 兵工学报, 2019, 40(6):1146-1153.
doi: 10.3969/j.issn.1000-1093.2019.06.004 |
|
doi: 10.3969/j.issn.1000-1093.2019.06.004 |
|
| [17] |
陈冰, 王红岩, 芮强, 等. 考虑履带张力作用的稳态转向性能[J]. 装甲兵工程学院学报, 2016, 30(3):36-40.
|
|
|
|
| [18] |
张滔, 戴瑜, 刘少军, 等. 深海履带式集矿机多体动力学建模与行走性能仿真分析[J]. 机械工程学报, 2015, 51(6):173-180.
doi: 10.3901/JME.2015.06.173 |
|
doi: 10.3901/JME.2015.06.173 |
|
| [19] |
doi: 10.1177/0954407016660268 URL |
| [20] |
doi: 10.1016/j.jterra.2017.07.001 URL |
| [21] |
doi: 10.1080/00423114.2019.1656812 URL |
| [22] |
doi: 10.1016/0022-4898(81)90015-X URL |
| [23] |
|
| [24] |
|
| [1] | 宁小磊, 吴颖霞, 于天朋, 陈维波, 单斌, 张燕. 基于改进灰色关联分析的仿真模型综合验证方法[J]. 兵工学报, 2016, 37(2): 338-347. |
| [2] | 丁勇, 肖泽龙, 许建中, 彭树生. 毫米波交流辐射计半实物仿真系统设计[J]. 兵工学报, 2015, 36(10): 1867-1874. |
| [3] | 吴静, 吴晓燕1, 滕江川1, 陈永兴1. 基于连续隐马尔可夫模型的仿真模型验证[J]. 兵工学报, 2012, 33(3): 367-372. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4