
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (6): 1795-1808.doi: 10.12382/bgxb.2022.0081
宋金超, 赵良玉*( )
)
收稿日期:2022-02-13
上线日期:2023-06-30
通讯作者:
基金资助:
SONG Jinchao, ZHAO Liangyu*()
Received:2022-02-13
Online:2023-06-30
摘要:
针对旋转弹采用捷联导引头和弹体追踪导引律时可能导致锥形运动失稳的问题,推导了捷联导引头在非旋转弹体坐标系下的动力学模型,建立了复数形式的弹体追踪制导控制系统数学模型;在不同弹体转速及阻尼回路增益情况下,分别考虑导引头响应延迟和陀螺标度因数误差,分析了上述制导控制系统的稳定性,并使用数值方法求得使其稳定的特征参数取值范围。研究结果表明:导引头延迟角越大,使系统稳定的制导回路增益上限越小;陀螺标度因数误差系数大于1时,使系统稳定的制导回路增益上限会变大,当陀螺标度因数误差系数小于1时,使系统稳定的制导回路增益稳定上限会变小。
宋金超, 赵良玉. 采用弹体追踪导引律的旋转弹锥形运动稳定性[J]. 兵工学报, 2023, 44(6): 1795-1808.
SONG Jinchao, ZHAO Liangyu. Attitude Pursuit GuidanceLaw for Coning Motion Stability of Spinning Missiles[J]. Acta Armamentarii, 2023, 44(6): 1795-1808.
图1 非旋转弹体坐标系与旋转弹体坐标系之间的转换
Fig.1 Conversion between non-spinning and spinning missile coordinate systems
图2 攻角侧滑角示意图
Fig.2 Angle of attack and angle of side-slip
图3 俯仰平面弹目视线关系图
Fig.3 Relationship of missile-to-target LOS in pitch plane
图4 捷联导引头弹体追踪系统结构图
Fig.4 APG system of the strapdown seeker
| 参数 | 数值 | 参数 | 数值 | |
|---|---|---|---|---|
| CLα | 11.932 | CD | 0.507 | |
| Cmα | -0.7504 | Cmδ | 0.2583 | |
| Cmpa | -0.1848 | Cmq | 1.35 | |
| Td/s | 0.003 | kd | 1 | |
| Ts/s | 0.012 | μs | 0.5 | |
| τ1/ s | 0.016 | ks | 1 | |
| Ix/It | 0.0030 | V/(m·s-1) | 1200 | |
| τ2/s | 0.007 | p/(rad·s-1) | 8π | |
| l/m | 7.6 | S/m2 | 0.0707 | |
| λt/(°) | 44.9 | a1 | 0.2125 | |
| a2 | 0.2090 | b11 | -23.7524 | |
| b21 | -0.2706 | b3 | 6.5933 |
表1 旋转弹参数表
Table 1 Parameters of spinning missile
| 参数 | 数值 | 参数 | 数值 | |
|---|---|---|---|---|
| CLα | 11.932 | CD | 0.507 | |
| Cmα | -0.7504 | Cmδ | 0.2583 | |
| Cmpa | -0.1848 | Cmq | 1.35 | |
| Td/s | 0.003 | kd | 1 | |
| Ts/s | 0.012 | μs | 0.5 | |
| τ1/ s | 0.016 | ks | 1 | |
| Ix/It | 0.0030 | V/(m·s-1) | 1200 | |
| τ2/s | 0.007 | p/(rad·s-1) | 8π | |
| l/m | 7.6 | S/m2 | 0.0707 | |
| λt/(°) | 44.9 | a1 | 0.2125 | |
| a2 | 0.2090 | b11 | -23.7524 | |
| b21 | -0.2706 | b3 | 6.5933 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9930 | 0.9959 | 1.0003 |
| 0.10 | 1.0430 | 1.0459 | 1.0503 |
| 0.20 | 1.1430 | 1.1459 | 1.1513 |
表2 无延迟角的制导回路增益下限
Table 2 Lower limit of the control and guidance loop gain without delay angle
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9930 | 0.9959 | 1.0003 |
| 0.10 | 1.0430 | 1.0459 | 1.0503 |
| 0.20 | 1.1430 | 1.1459 | 1.1513 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 341.6 | 335.0 | 312.6 |
| 0.10 | 477.5 | 474.4 | 459.5 |
| 0.20 | 761.6 | 761.3 | 753.6 |
表3 λg=3°制导回路增益上限
Table 3 Upper limit of the loop gain with λg=3°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 341.6 | 335.0 | 312.6 |
| 0.10 | 477.5 | 474.4 | 459.5 |
| 0.20 | 761.6 | 761.3 | 753.6 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 161.9 | 159.0 | 148.6 |
| 0.10 | 226.5 | 225.3 | 218.7 |
| 0.20 | 361.2 | 361.8 | 358.7 |
表4 λg=6°制导回路增益上限
Table 4 Upper limit of the loop gain with λg=6°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 161.9 | 159.0 | 148.6 |
| 0.10 | 226.5 | 225.3 | 218.7 |
| 0.20 | 361.2 | 361.8 | 358.7 |
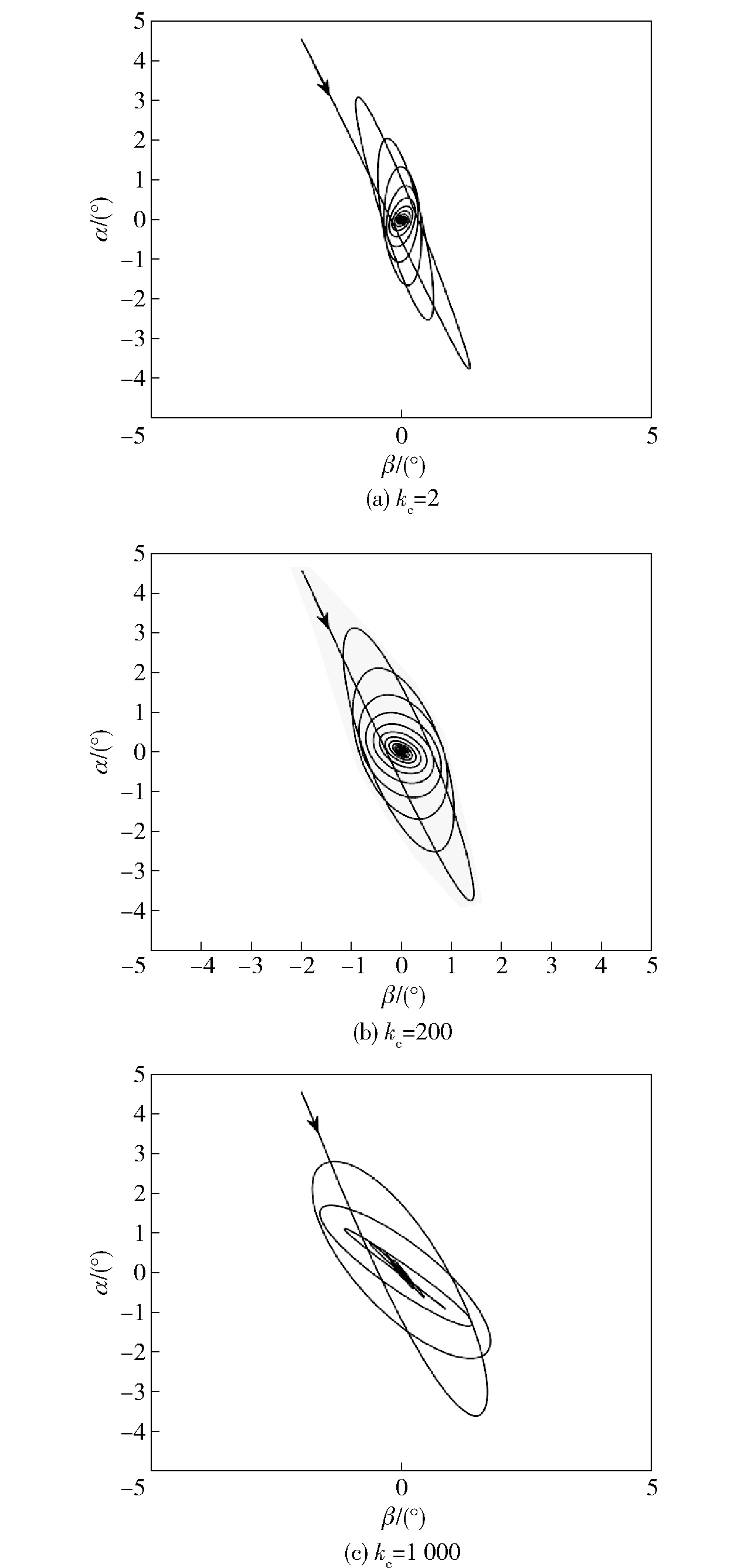
图5 不考虑导引头响应延迟的收敛锥形运动
Fig.5 Convergent coning motion without considering seeker delay response
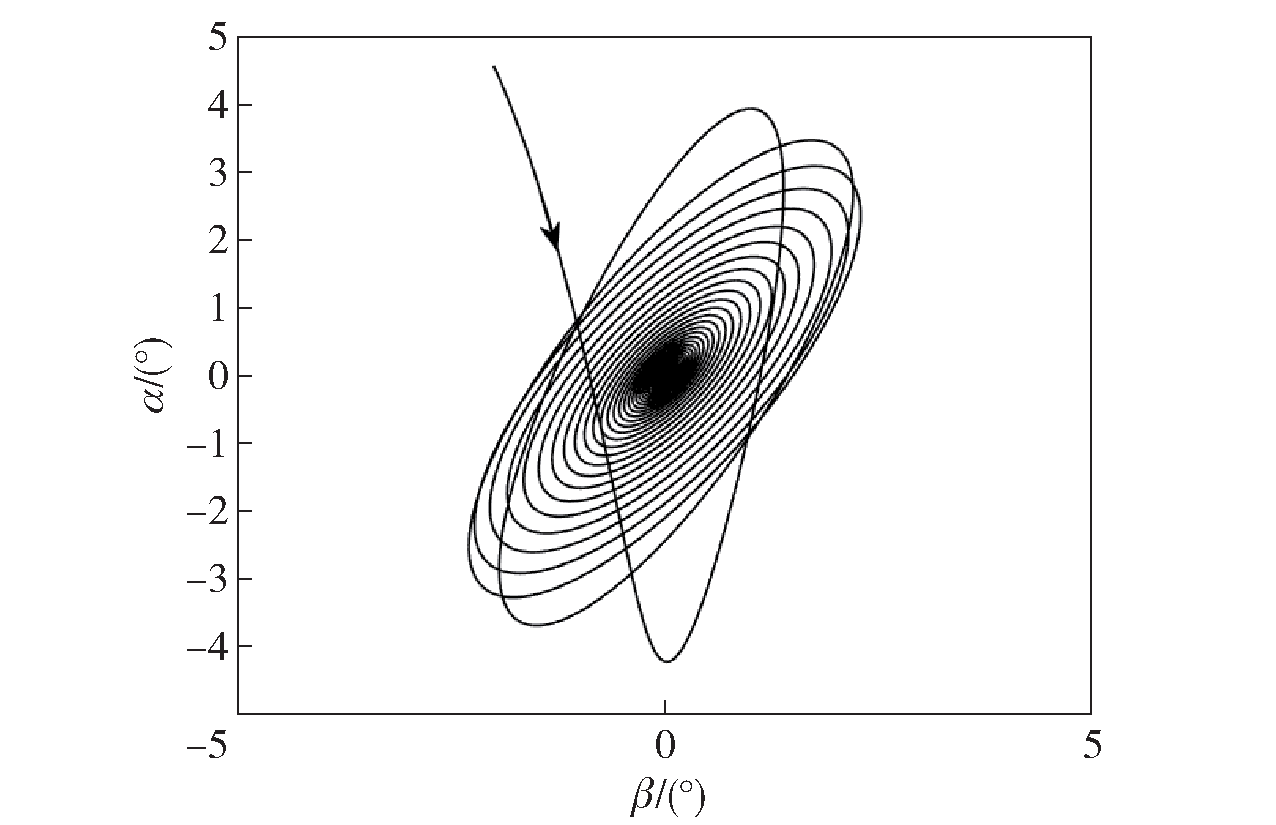
图6 λg=3°时收敛的锥形运动
Fig.6 Convergent coning motion with λg=3°
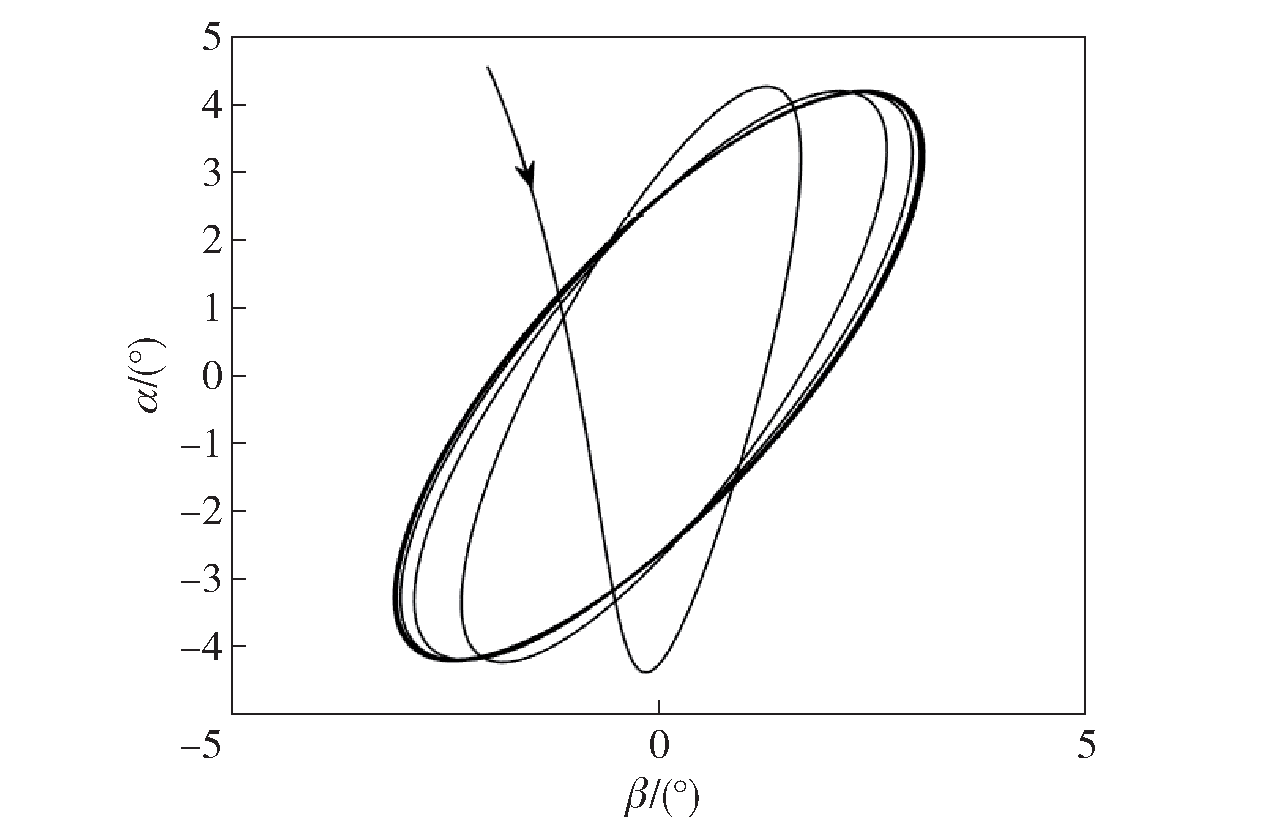
图7 λg=3°时弹体临界稳定的锥形运动
Fig.7 Critical stable coning motion with λg=3°

图8 λg=3°时弹体发散的锥形运动
Fig.8 Divergent coning motion with λg=3°
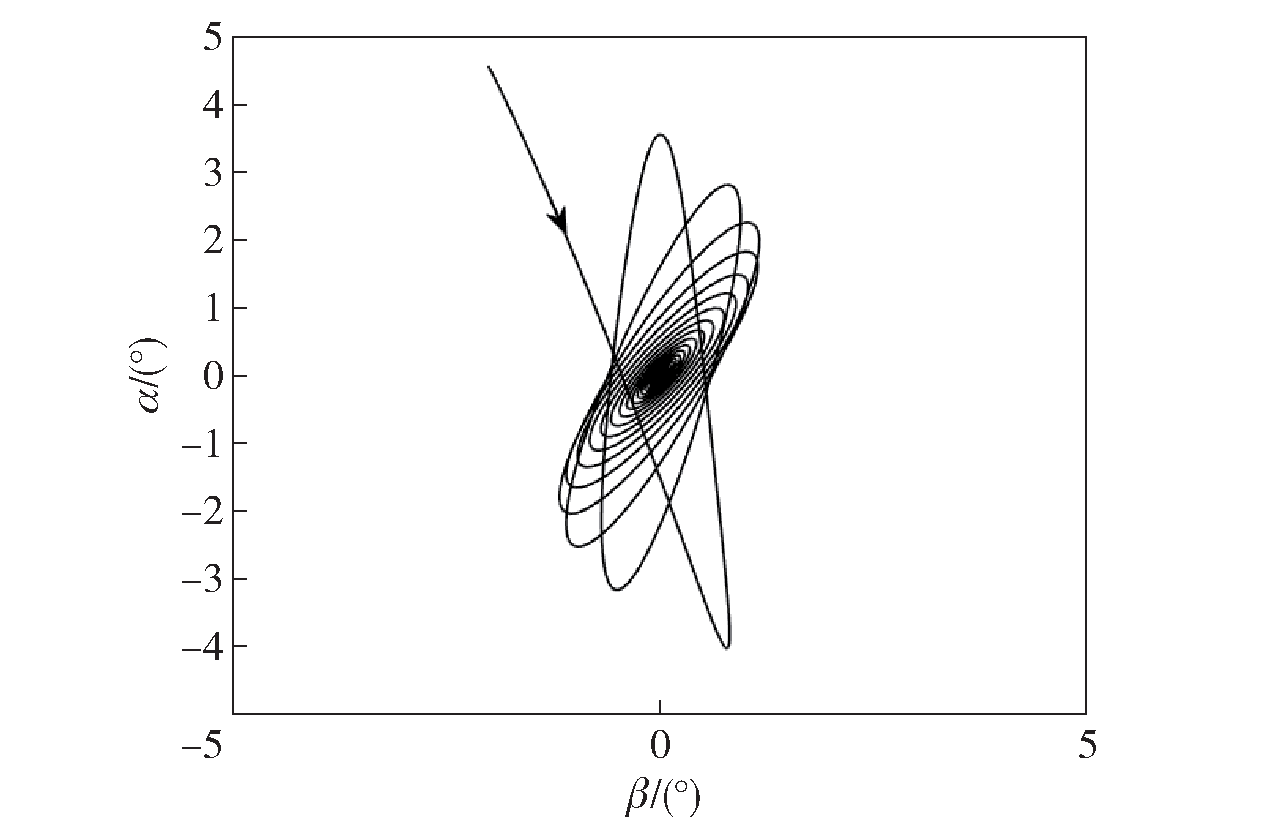
图9 λg=6°时收敛的锥形运动
Fig.9 Convergent coning motion with λg=6°
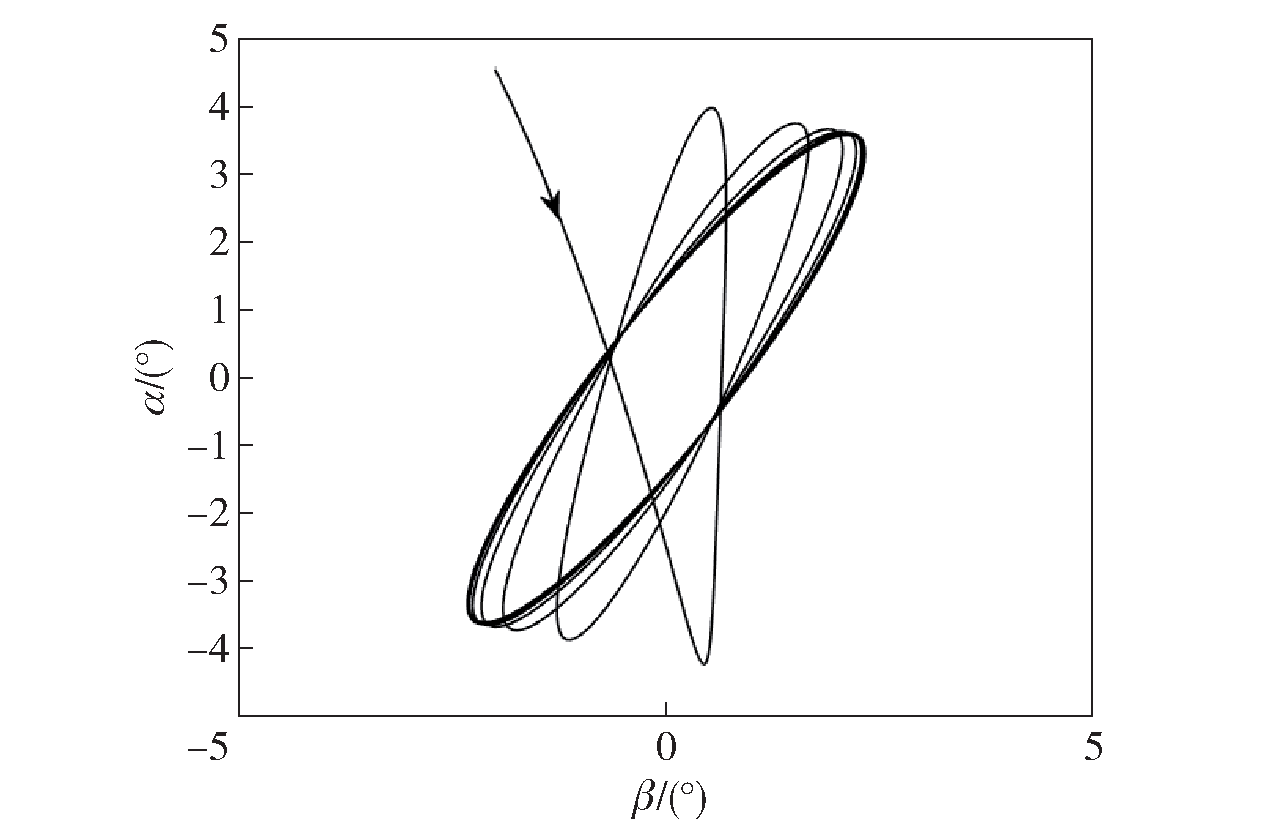
图10 λg=6°时弹体临界稳定的锥形运动
Fig.10 Critical stable coning motion with λg=6°

图11 λg=6°时弹体发散的锥形运动
Fig.11 Divergent coning motion with λg=6°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9970 | 0.9999 | 1.0043 |
| 0.10 | 1.0470 | 1.0499 | 1.0543 |
| 0.20 | 1.1470 | 1.1499 | 1.1553 |
表5 kf=1.004无延迟角的制导回路增益上限
Table 5 Upper limit of the loop gain at kf=1.004
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9970 | 0.9999 | 1.0043 |
| 0.10 | 1.0470 | 1.0499 | 1.0543 |
| 0.20 | 1.1470 | 1.1499 | 1.1553 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9890 | 0.9919 | 1.0963 |
| 0.10 | 1.0390 | 1.0419 | 1.0463 |
| 0.20 | 1.1390 | 1.1419 | 1.1473 |
表6 kf=0.996无延迟角的制导回路增益上限
Table 6 Upper limit of the loop gain at kf=0.996
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 0.9890 | 0.9919 | 1.0963 |
| 0.10 | 1.0390 | 1.0419 | 1.0463 |
| 0.20 | 1.1390 | 1.1419 | 1.1473 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 340.9 | 336.3 | 316.0 |
| 0.10 | 476.5 | 475.6 | 463.1 |
| 0.20 | 759.0 | 762.1 | 757.0 |
表7 kf=1.004,λg=3°制导回路增益上限
Table 7 Upper limit of the loop gain with, kf=1.004,λg=3°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 340.9 | 336.3 | 316.0 |
| 0.10 | 476.5 | 475.6 | 463.1 |
| 0.20 | 759.0 | 762.1 | 757.0 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 339.3 | 330.8 | 306.7 |
| 0.10 | 474.6 | 469.2 | 452.1 |
| 0.20 | 757.1 | 754.7 | 744.2 |
表8 kf=0.996、λg=3°制导回路增益上限
Table 8 Upper limit of the loop gain with kf=0.996,λg=3°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 339.3 | 330.8 | 306.7 |
| 0.10 | 474.6 | 469.2 | 452.1 |
| 0.20 | 757.1 | 754.7 | 744.2 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 162.3 | 159.5 | 149.0 |
| 0.10 | 227.0 | 226.0 | 219.1 |
| 0.20 | 361.8 | 362.3 | 358.9 |
表9 kf=1.004、λg=6°制导回路增益上限
Table 9 Upper limit of the loop gain with kf=1.004,λg=6°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 162.3 | 159.5 | 149.0 |
| 0.10 | 227.0 | 226.0 | 219.1 |
| 0.20 | 361.8 | 362.3 | 358.9 |
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 161.5 | 158.6 | 147.9 |
| 0.10 | 226.0 | 224.9 | 218.1 |
| 0.20 | 360.8 | 361.5 | 358.0 |
表10 kf=0.996、λg=6°制导回路增益上限
Table 10 Upper limit of the loop gain with kf=0.996,λg=6°
| kω | /(π rad·s-1) | ||
|---|---|---|---|
| 4 | 8 | 12 | |
| 0.05 | 161.5 | 158.6 | 147.9 |
| 0.10 | 226.0 | 224.9 | 218.1 |
| 0.20 | 360.8 | 361.5 | 358.0 |
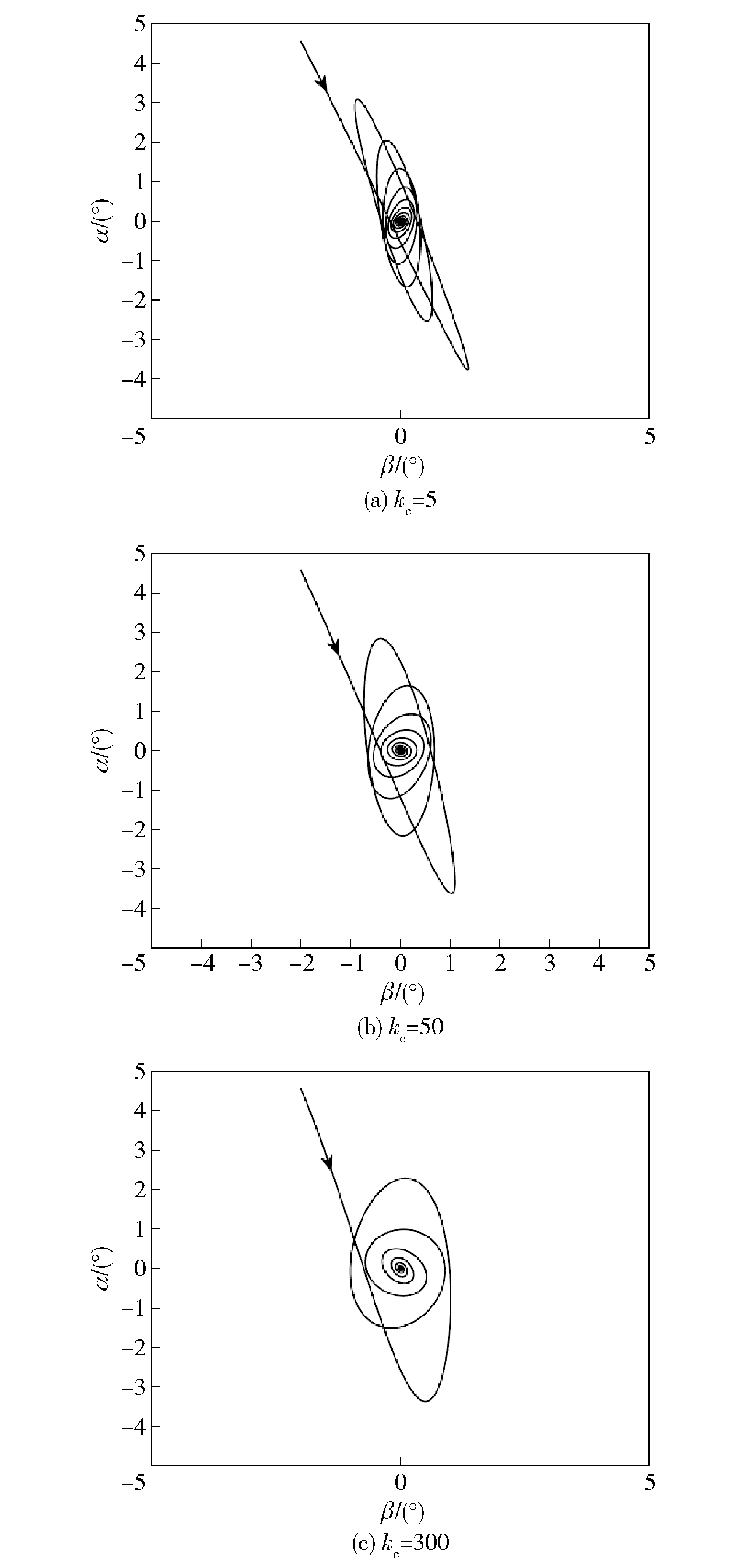
图12 仅考虑陀螺标度因数误差的收敛锥形运动
Fig.12 Convergent coning motion considering the gyro scale-factor error
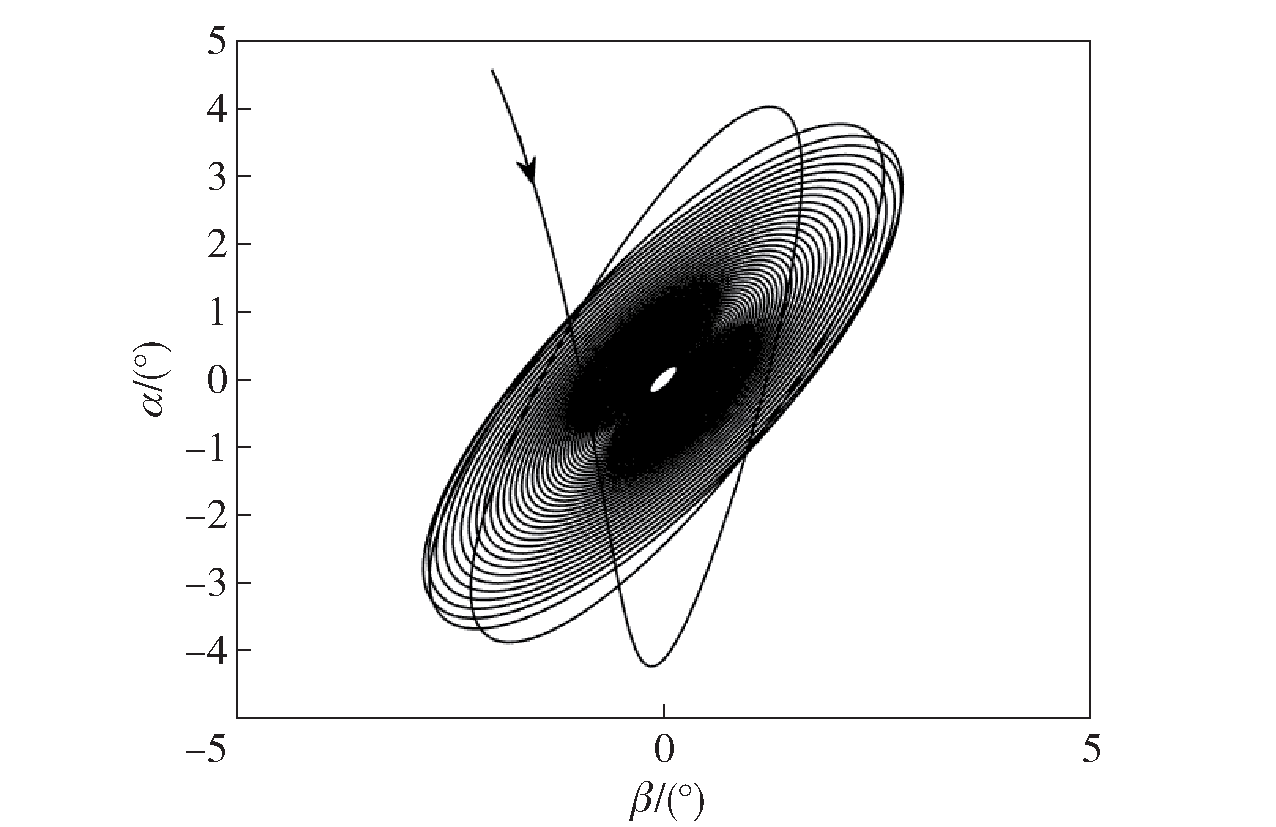
图13 λg=3°、kf=1.004时收敛的锥形运动
Fig.13 Convergent coning motion with λg=3°、kf=1.004
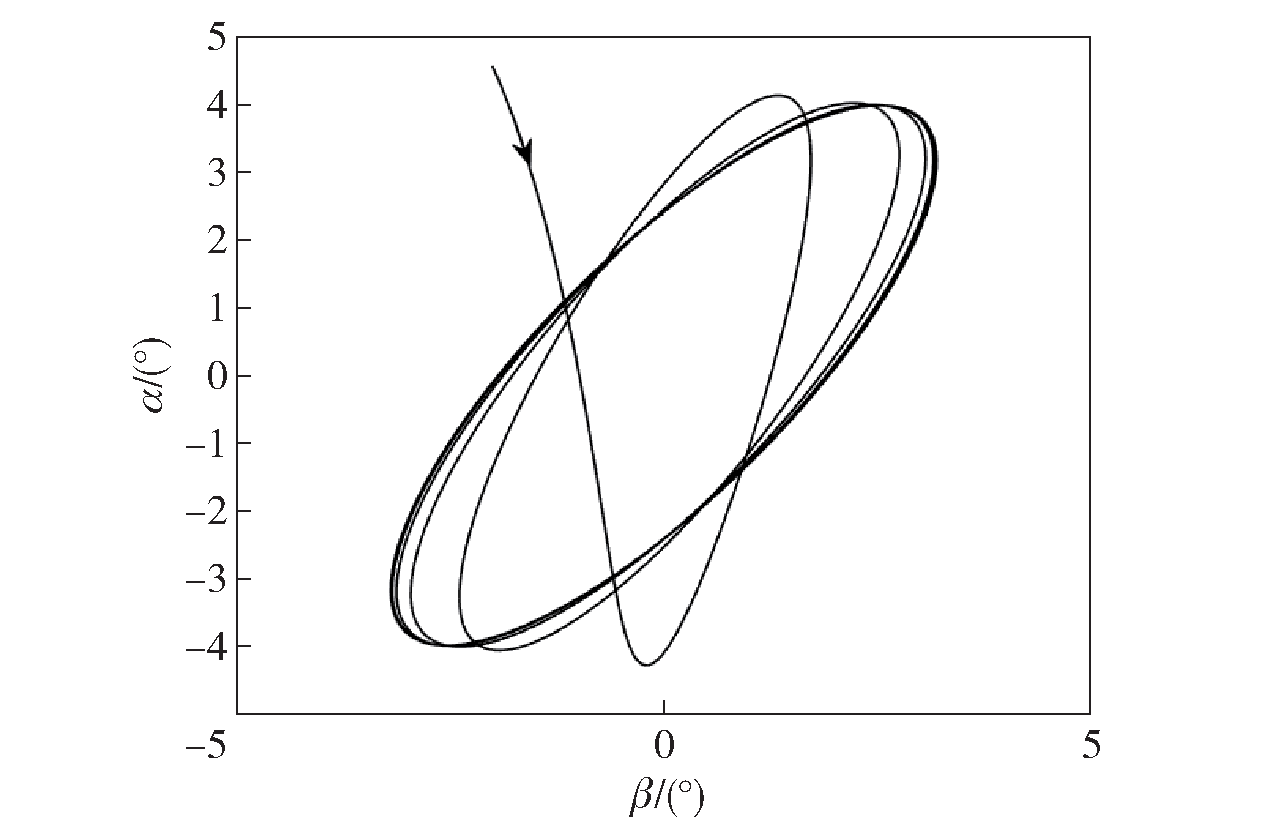
图14 λg=3°、kf=1.004时临界稳定的锥形运动
Fig.14 Critical stable coning motion with λg=3°、kf=1.004

图15 λg=3°、kf=1.004时发散的锥形运动
Fig.15 Divergent coning motion with λg=3°、kf=1.004
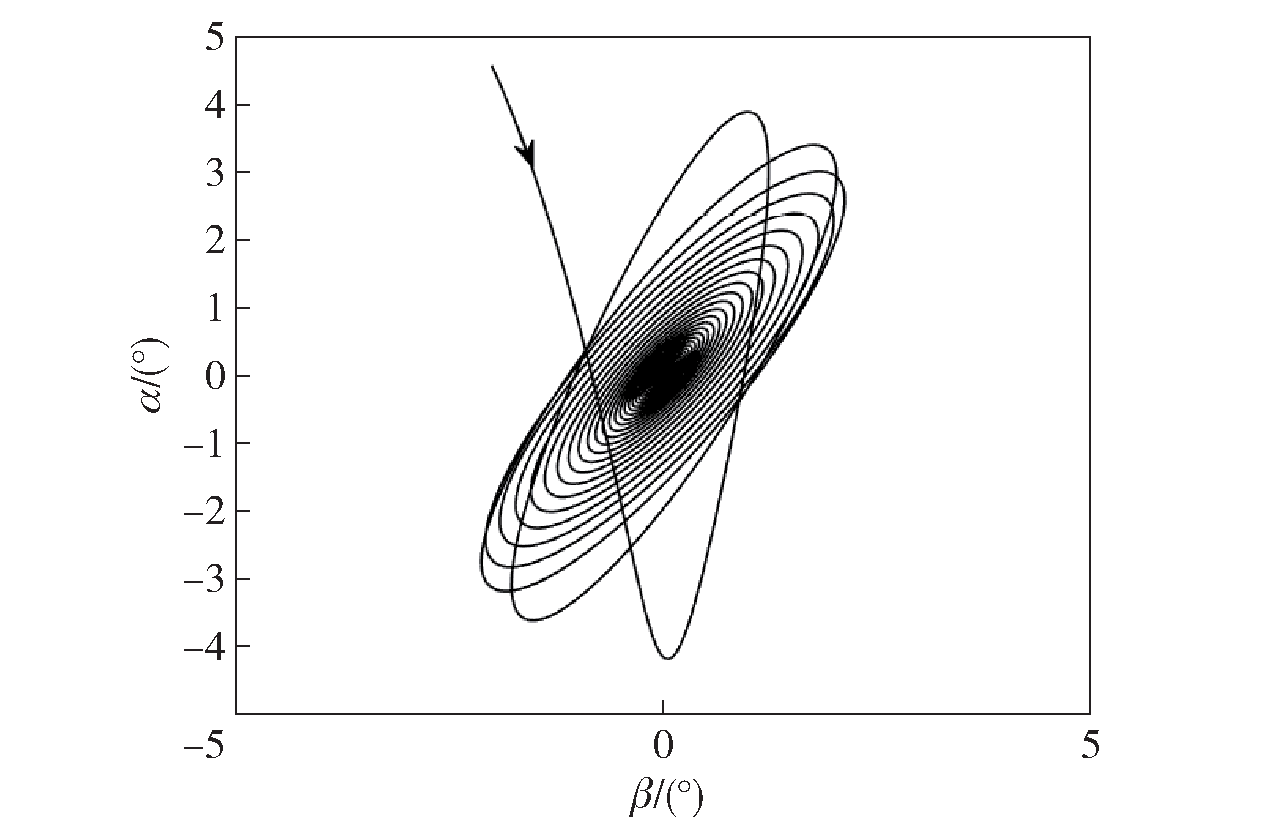
图16 λg=6°、kf=0.996时收敛的锥形运动(kc=190)
Fig.16 Convergent coning motion with λg=6°、kf=0.996
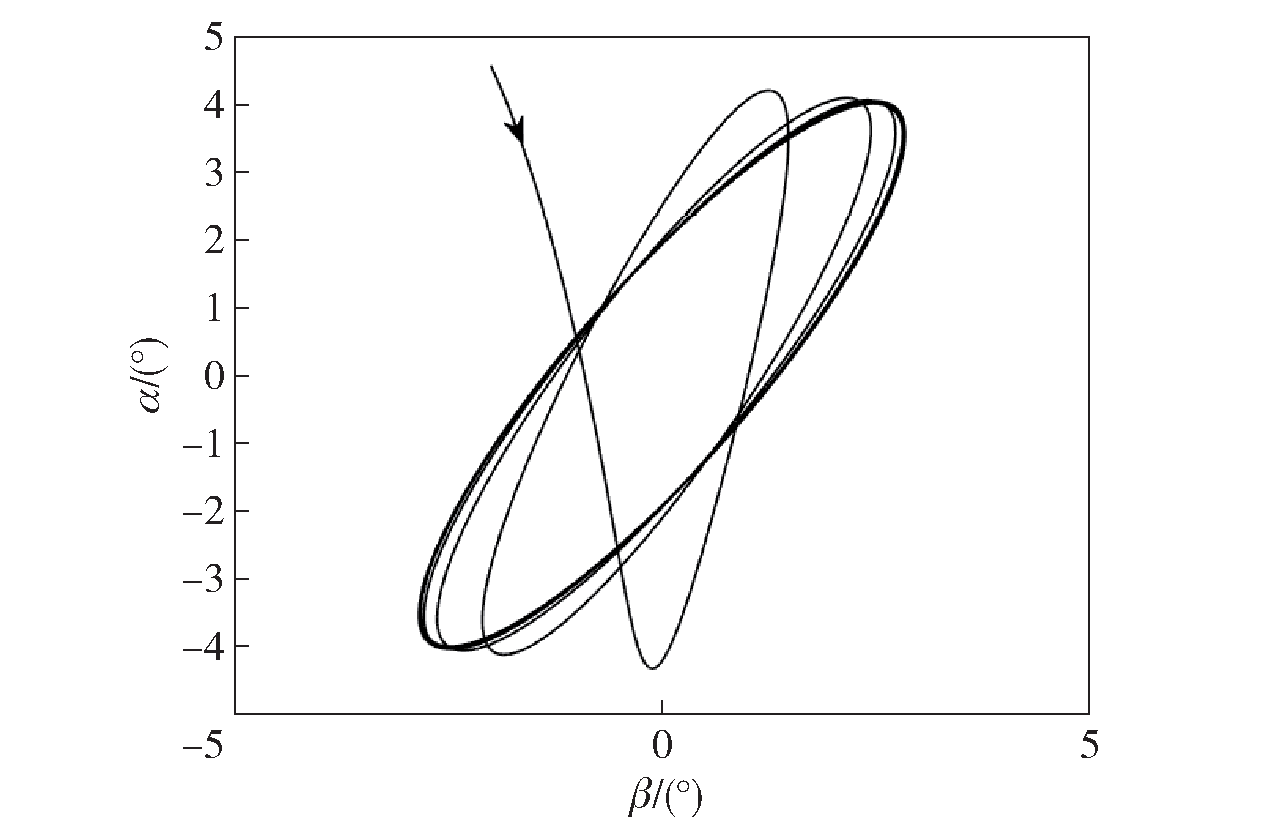
图17 λg=6°、kf=0.996时临界稳定的锥形运动
Fig.17 Critical stable coning motion with λg=6°、kf=0.996

图18 λg=6°、kf=0.996时弹体发散的锥形运动
Fig.18 Divergent coning motion with λg=6°、kf=0.996
| [1] |
杨树兴. 陆军多管火箭武器的发展与思考[J]. 兵工学报, 2016, 37(7):1299-1305.
doi: 10.3969/j.issn.1000-1093.2016.07.019 |
|
|
|
| [2] |
陈成, 赵良玉, 谢浩怡, 等. 单通道控制旋转弹角运动的复分析方法[J]. 兵工学报, 2021, 42(2):308-319.
|
|
doi: 10.3969/j.issn.1000-1093.2021.02.009 |
|
| [3] |
丁天宝, 何朝, 王良明, 等. 高速旋转炮弹宽海拔弹道解算方法[J]. 兵工学报, 2021, 42(1):209-213.
|
|
doi: 10.3969/j.issn.1000-1093.2021.01.024 |
|
| [4] |
杨树兴, 赵良玉, 闫晓勇. 旋转弹动态稳定性理论[M]. 北京: 国防工业出版社, 2014.
|
|
|
|
| [5] |
doi: 10.2514/1.51627 URL |
| [6] |
|
| [7] |
陈亮, 刘荣忠, 郭锐, 等. 旋转尾翼弹箭极限圆锥运动稳定判据[J]. 兵工学报, 2019, 40(7): 1329-1339.
doi: 10.3969/j.issn.1000-1093.2019.07.001 |
|
doi: 10.3969/j.issn.1000-1093.2019.07.001 |
|
| [8] |
舒敬荣, 李红星, 李宏玲. 非线性力矩作用下气动偏心弹丸强迫圆锥运动稳定性条件[J]. 兵工学报, 2018, 39(5): 875-882.
doi: 10.3969/j.issn.1000-1093.2018.05.006 |
|
|
|
| [9] |
吴映锋, 钟扬威, 王良明. 旋转稳定二维弹道修正弹在固定舵作用下的角运动特性研究[J]. 兵工学报, 2017, 38(7): 1263-1272.
doi: 10.3969/j.issn.1000-1093.2017.07.003 |
|
|
|
| [10] |
|
| [11] |
doi: 10.1016/j.ijleo.2016.10.042 URL |
| [12] |
|
| [13] |
|
| [14] |
doi: 10.1177/0954410012452367 URL |
| [15] |
doi: 10.1016/j.ast.2019.04.013 URL |
| [16] |
doi: 10.1016/j.ast.2017.03.036 URL |
| [17] |
doi: 10.1017/aer.2016.75 URL |
| [18] |
doi: 10.1016/j.ast.2017.10.007 URL |
| [19] |
doi: 10.1090/bull/2015-52-02 URL |
| [20] |
李克勇. 旋转导弹制导控制与稳定性问题研究[D]. 北京: 北京理工大学, 2014.
|
|
|
|
| [21] |
胡啸. 制导旋转弹稳定性研究[D]. 北京: 北京理工大学, 2019.
|
|
|
|
| [22] |
doi: 10.1016/S1000-9361(09)60227-2 URL |
| [23] |
沈浩, 祁载康. 提高弹体追踪制导律精度的研究[J]. 弹箭与制导学报, 2008, 28(4):7-10.
|
|
|
|
| [24] |
徐一航, 陈少松, 魏恺, 等. 正,余弦指令控制方式旋转导弹气动特性分析[J]. 哈尔滨工业大学学报, 2022, 54(1):114-122.
|
|
|
| [1] | 苏迪, 王少博, 张成, 陈志升, 刘超越. 基于生成对抗网络的弹载图像盲去模糊算法[J]. 兵工学报, 2024, 45(3): 855-863. |
| [2] | 张雪雪, 薛智华, 聂洪奇, 严启龙. 含能燃速抑制剂的制备及其对AP分解的负催化效应[J]. 兵工学报, 2024, 45(1): 15-25. |
| [3] | 陈柏翰, 沈子楷, 邹慧辉, 王伟光, 王可慧. 硬目标内弹体斜侵彻状态的基本演化特性[J]. 兵工学报, 2023, 44(S1): 59-66. |
| [4] | 陈柏翰, 王笠镔, 邹慧辉, 王伟光, 王可慧. 自旋对弹体侵彻效应的影响[J]. 兵工学报, 2023, 44(S1): 117-124. |
| [5] | 李东阳, 常思江, 王中原. 弹箭角运动的非线性吸引域估计[J]. 兵工学报, 2023, 44(8): 2329-2341. |
| [6] | 郗雪辰, 杨鹏飞, 王宽亮. 非均匀氢气/空气混合物中一维爆轰波的振荡特性[J]. 兵工学报, 2023, 44(4): 982-993. |
| [7] | 赵焕娟, 刘克庆, 庞磊, 刘婧, 林敏, 董士铭. 爆轰不稳定性及初始压力对螺旋爆轰轨迹角的影响[J]. 兵工学报, 2023, 44(4): 1086-1096. |
| [8] | 张鑫, 林凡, 沈鑫杰. 基于改进SOGI-FLL的旋转弹舵机滞后测试方法[J]. 兵工学报, 2023, 44(2): 428-436. |
| [9] | 徐浩轩, 马晓军, 刘春光. 混合动力装甲车直流微电网大信号稳定性分析[J]. 兵工学报, 2023, 44(1): 108-116. |
| [10] | 姜祎, 王挺, 邵沛瑶, 徐瑶, 邵士亮. 一种轮腿复合型机器人的步态研究与越障性能分析[J]. 兵工学报, 2023, 44(1): 247-259. |
| [11] | 王少博, 张成, 苏迪, 冀瑞静. 基于改进YOLOv3和核相关滤波算法的旋转弹目标探测算法[J]. 兵工学报, 2022, 43(5): 1032-1045. |
| [12] | 沈忱, 闫石, 姚杰, 焦清介, 廖明义, 常云飞. 液态氟橡胶改性端羟基嵌段共聚醚粘合剂及其对铝粉热氧化行为的影响[J]. 兵工学报, 2022, 43(4): 780-787. |
| [13] | 钱林方, 陈光宋, 林通, 刘太素. 车载炮底盘载荷分离设计技术[J]. 兵工学报, 2022, 43(11): 2773-2784. |
| [14] | 周建平, 李威, 温求遒, 夏群利, 姜欢. 考虑滚仰导引头寄生回路的旋转导弹驾驶仪稳定性设计[J]. 兵工学报, 2022, 43(1): 1-10. |
| [15] | 单春来, 刘朋科, 古斌, 贺琦, 徐宏英. 多级优化算法在火炮总体结构设计中的应用[J]. 兵工学报, 2022, 43(1): 11-19. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4