
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (4): 240350-.doi: 10.12382/bgxb.2024.0350
Previous Articles Next Articles
SU Jiahao1, LIU Siyu1, LU Chunlei1, GUO Zhao1,*( ), WANG Zhirui2,3, YAN Tong2,3, DANG Ruina2,3, SU Bo2,3
), WANG Zhirui2,3, YAN Tong2,3, DANG Ruina2,3, SU Bo2,3
Received:2024-05-08
Online:2025-04-30
Contact:
GUO Zhao
CLC Number:
SU Jiahao, LIU Siyu, LU Chunlei, GUO Zhao, WANG Zhirui, YAN Tong, DANG Ruina, SU Bo. Design of a Discrete Series Elastic Actuated Spine for Quadruped Robots[J]. Acta Armamentarii, 2025, 46(4): 240350-.
Add to citation manager EndNote|Ris|BibTeX
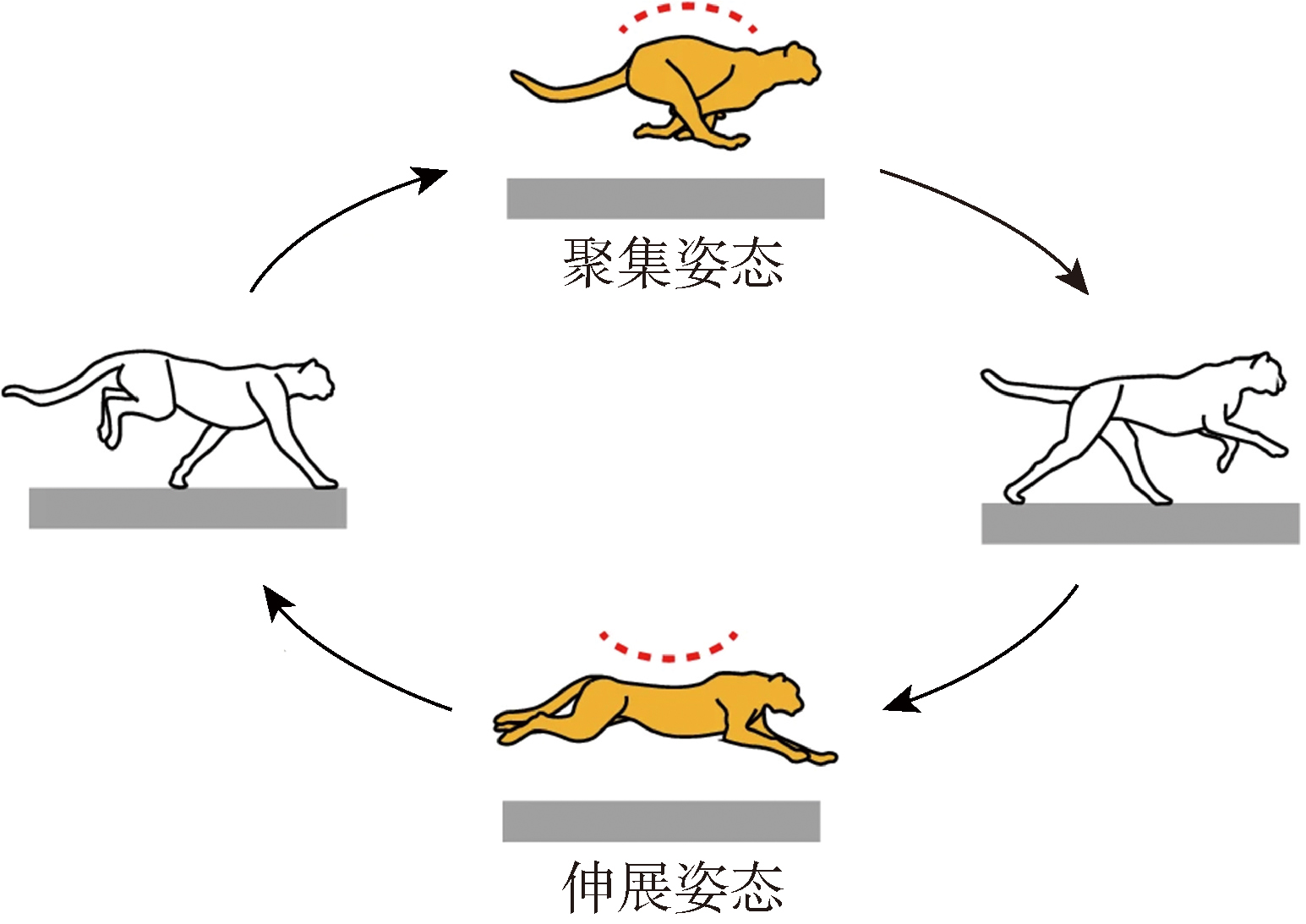
Fig.1 Two gaits of a cheetah during running

Fig.2 Overall structural design of spine
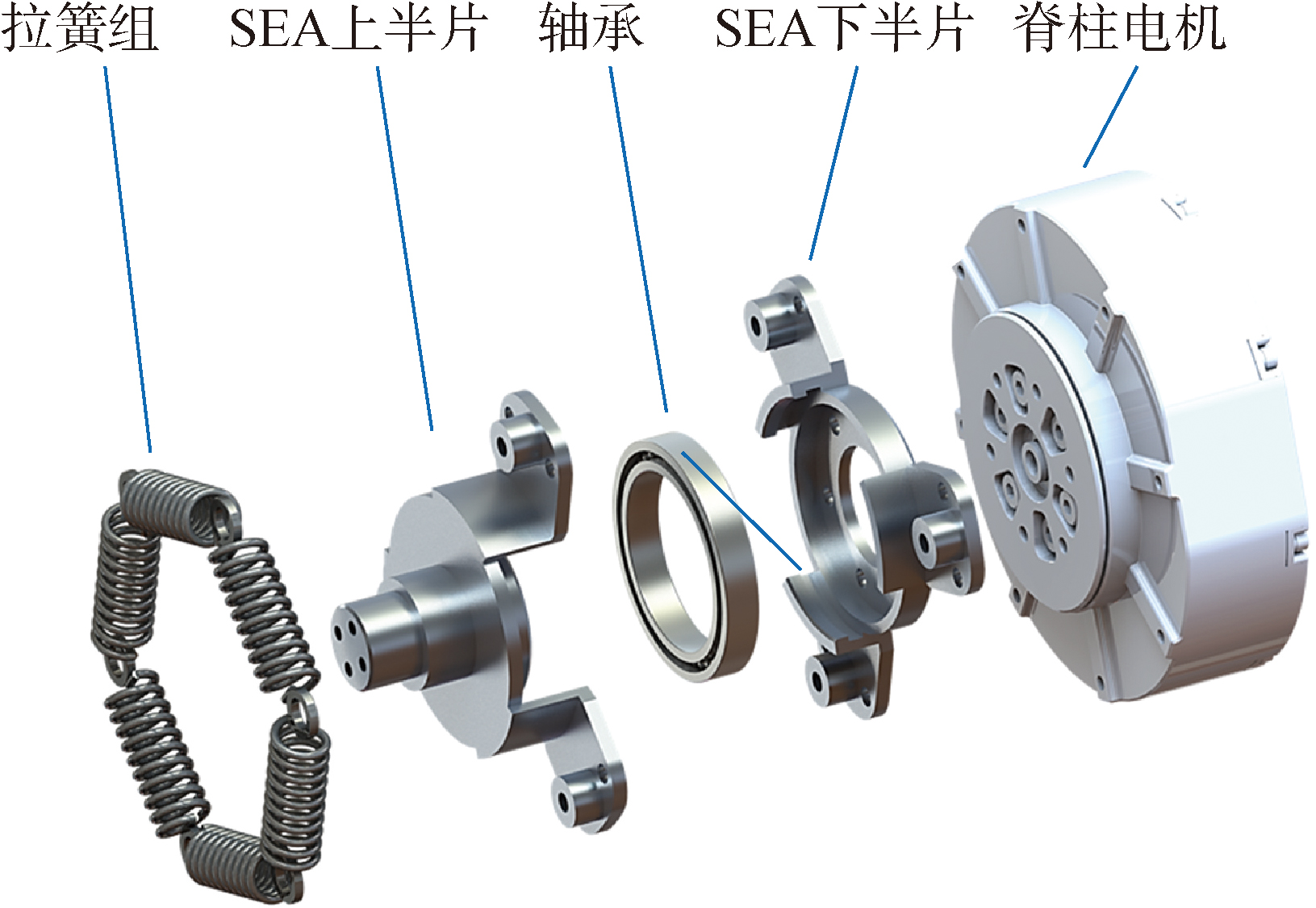
Fig.3 SEA structure

Fig.4 Installation diagram of SEA

Fig.5 Experimental overall prototype

Fig.6 Compression process of SEA

Fig.7 Schematic diagram of SEA

Fig.8 Establishment of single-leg kinematic coordinate system
| i | θi/(°) | di/mm | αi/(°) | ∂i/mm |
|---|---|---|---|---|
| 1 | d0 | ∂1 | ||
| 1' | θ1+90 | 90 | ||
| 2 | d1 | |||
| 3 | θ2 | d2 | -90 | |
| 4 | θ3 | d3 | ∂3 | |
| 5 | θ4-90 | ∂4 |
Table 1 Single leg D-H parameters
| i | θi/(°) | di/mm | αi/(°) | ∂i/mm |
|---|---|---|---|---|
| 1 | d0 | ∂1 | ||
| 1' | θ1+90 | 90 | ||
| 2 | d1 | |||
| 3 | θ2 | d2 | -90 | |
| 4 | θ3 | d3 | ∂3 | |
| 5 | θ4-90 | ∂4 |
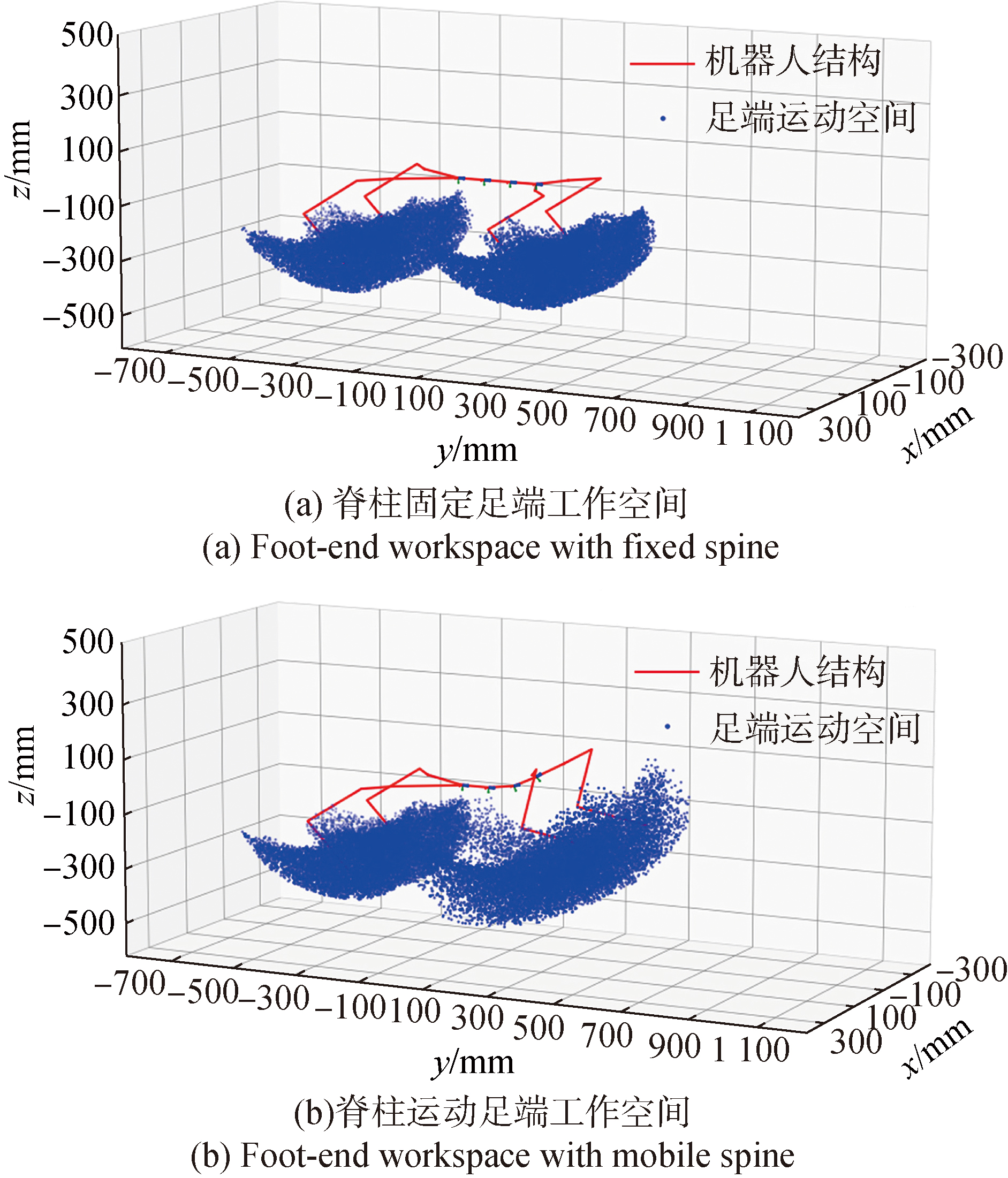
Fig.9 Comparison of foot-end workspaces with and without spine
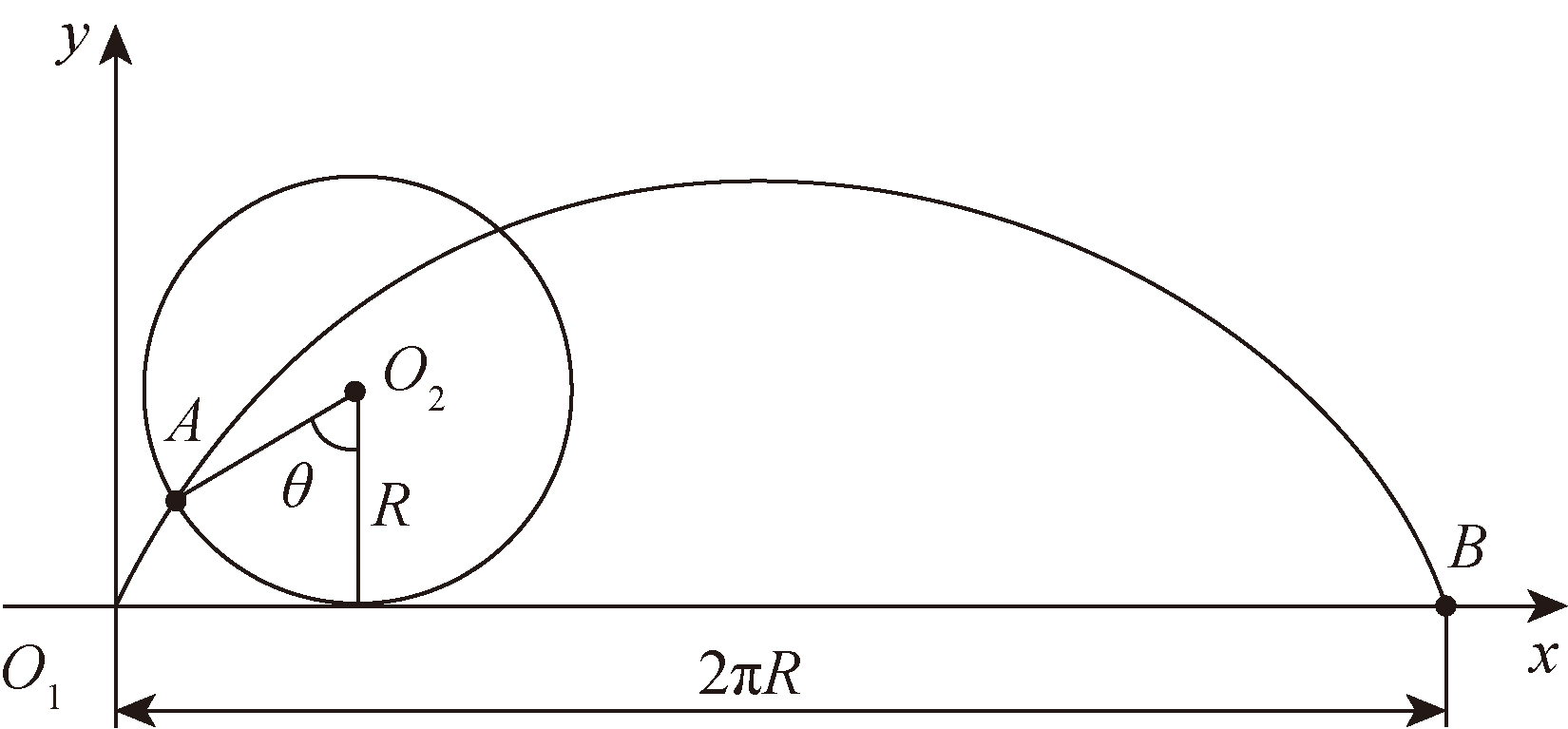
Fig.10 Cycloid trajectory
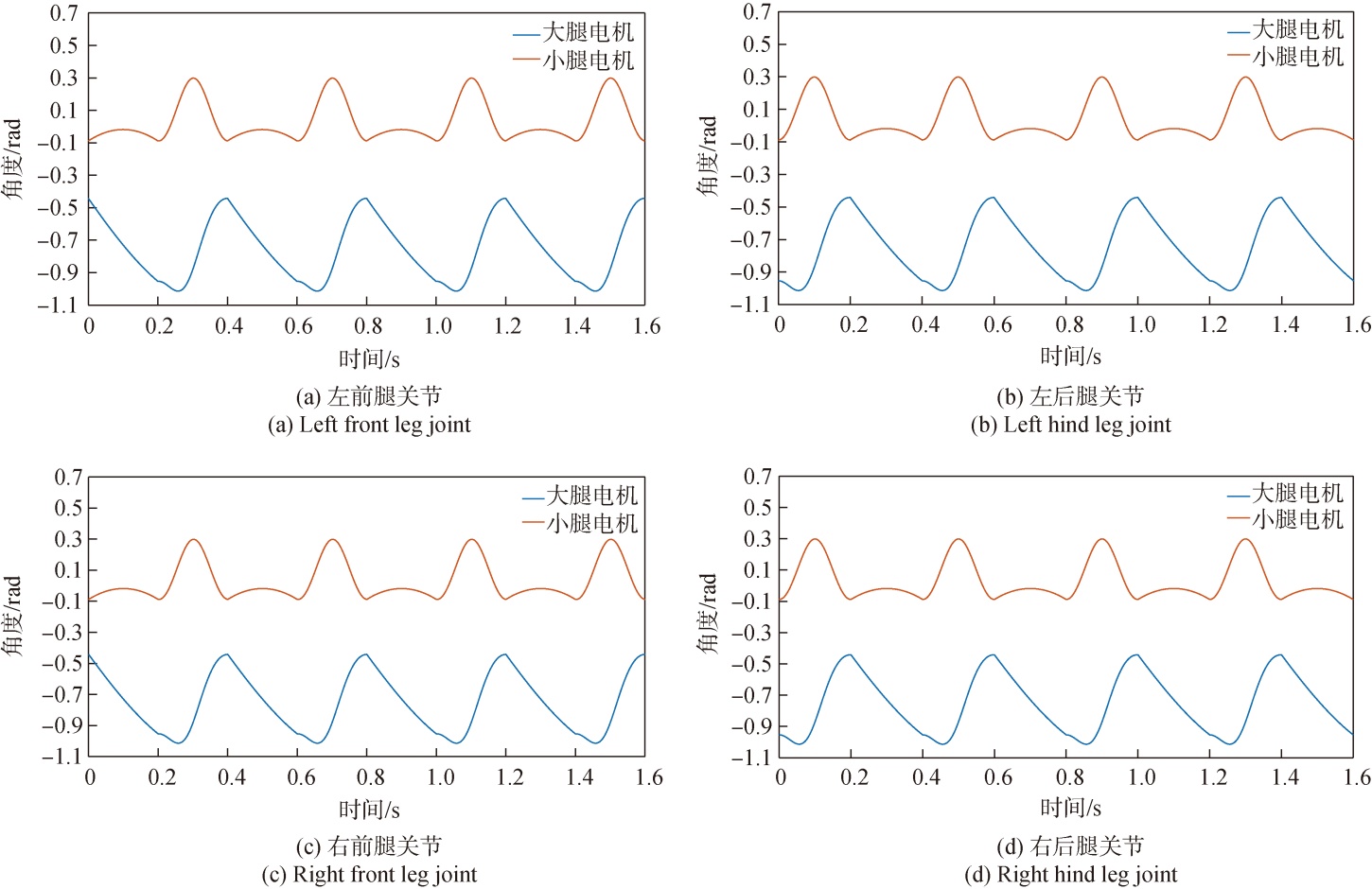
Fig.11 Motion trajectories of leg joints under bound gait

Fig.12 Motion trajectories of leg joints under running gait

Fig.13 Comparison of stride lengths with and without spine

Fig.14 Equivalent stiffness test platform
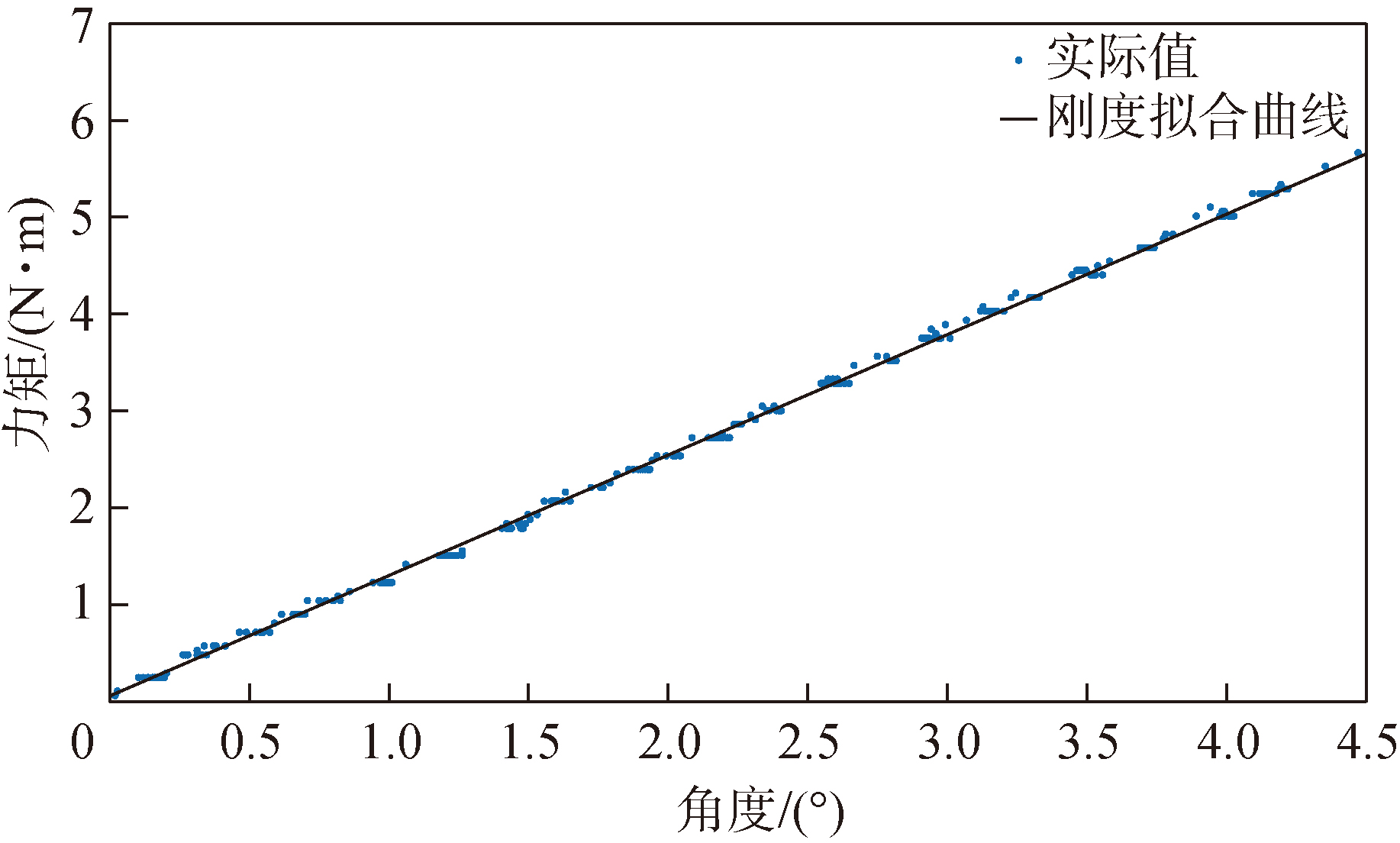
Fig.15 Equivalent stiffness curve

Fig.16 Frequency response experiment

Fig.17 Impact test experimental platform
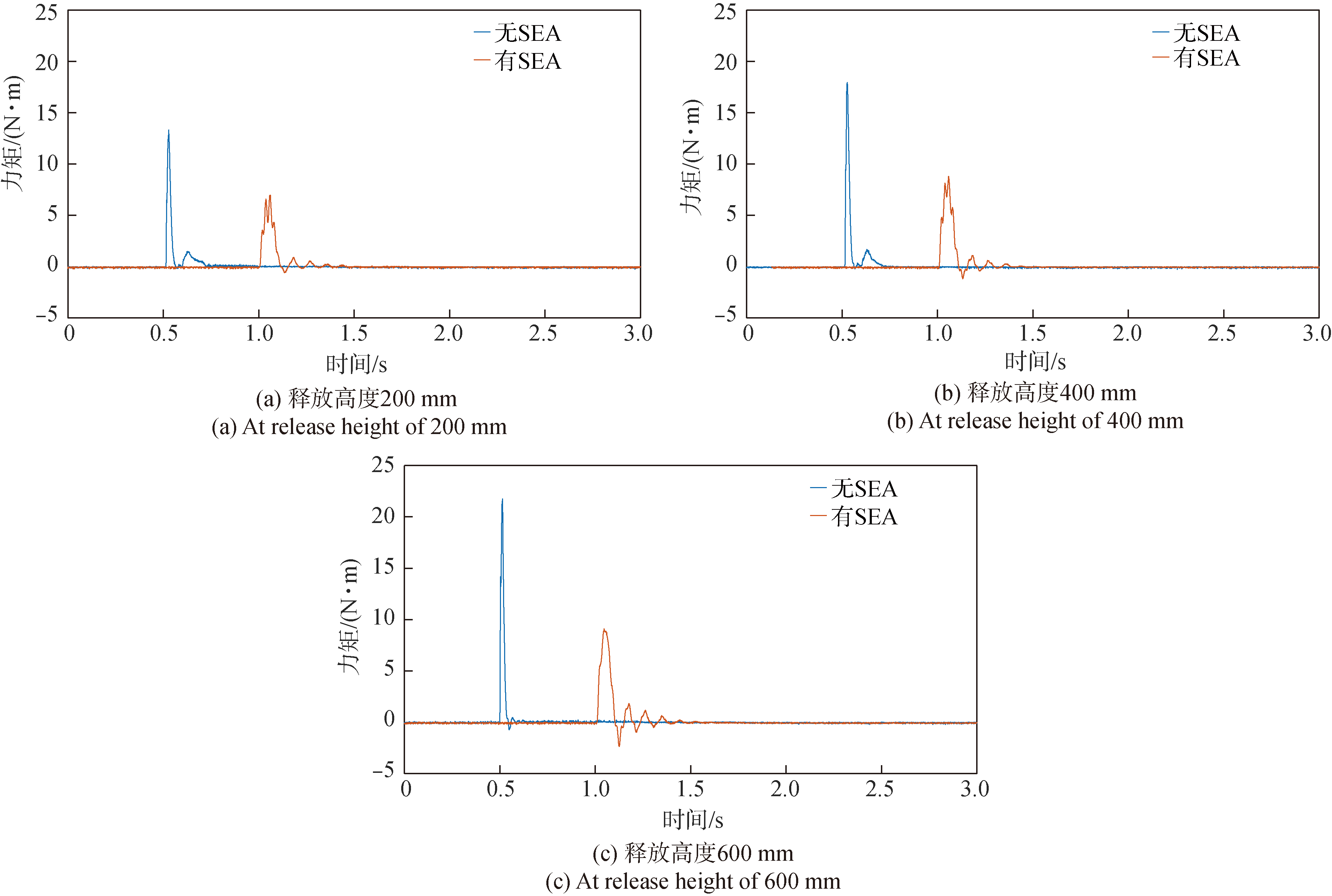
Fig.18 Motor torques under different impacts
| 下落高度mm | 有SEA峰值力矩/ (N·m) | 无SEA峰值 力矩/(N·m) | 减少百分比/% |
|---|---|---|---|
| 200 | 6.97 | 13.30 | 47.6% |
| 400 | 8.78 | 17.93 | 51.0% |
| 600 | 9.10 | 21.76 | 58.2% |
Table 2 Experiments of torque buffering with SEA and without SEA in terms of peak torque
| 下落高度mm | 有SEA峰值力矩/ (N·m) | 无SEA峰值 力矩/(N·m) | 减少百分比/% |
|---|---|---|---|
| 200 | 6.97 | 13.30 | 47.6% |
| 400 | 8.78 | 17.93 | 51.0% |
| 600 | 9.10 | 21.76 | 58.2% |

Fig.19 Prototype stride test platform

Fig.20 Stride length comparison of bound gait

Fig.21 Jump buffer experiment

Fig.22 Comparison of position and torque of each motor
| 电机 | 有SEA脊柱 | 无SEA脊柱 | 有SEA脊柱峰值力矩减少百分比/% | |||||
|---|---|---|---|---|---|---|---|---|
| 峰值 | 标准差 | 峰值 | 标准差 | |||||
| 前腿大腿 | 3.70 | -3.42 | 1.09 | 5.71 | -2.80 | 1.60 | 35.2 | |
| 前腿小腿 | 0.52 | -16.94 | 2.41 | 2.23 | -19.23 | 3.31 | 12.0 | |
| 后腿大腿 | 0.37 | -6.64 | 1.18 | 1.32 | -12.23 | 1.81 | 45.7 | |
| 后腿小腿 | 0.54 | -15.80 | 2.88 | 1.11 | -17.61 | 3.15 | 10.3 | |
| 脊柱 | 1.36 | -3.51 | 1.02 | |||||
Table 3 Comparison of motor torque data with and without SEA spine N·m
| 电机 | 有SEA脊柱 | 无SEA脊柱 | 有SEA脊柱峰值力矩减少百分比/% | |||||
|---|---|---|---|---|---|---|---|---|
| 峰值 | 标准差 | 峰值 | 标准差 | |||||
| 前腿大腿 | 3.70 | -3.42 | 1.09 | 5.71 | -2.80 | 1.60 | 35.2 | |
| 前腿小腿 | 0.52 | -16.94 | 2.41 | 2.23 | -19.23 | 3.31 | 12.0 | |
| 后腿大腿 | 0.37 | -6.64 | 1.18 | 1.32 | -12.23 | 1.81 | 45.7 | |
| 后腿小腿 | 0.54 | -15.80 | 2.88 | 1.11 | -17.61 | 3.15 | 10.3 | |
| 脊柱 | 1.36 | -3.51 | 1.02 | |||||
| [1] |
|
| [2] |
|
| [3] |
荣学文. SCalf 液压驱动四足机器人的机构设计与运动分析[D]. 济南: 山东大学, 2013.
|
|
|
|
| [4] |
柴汇, 孟健, 荣学文, 等. 高性能液压驱动四足机器人 SCalf 的设计与实现[J]. 机器人, 2014, 36(4):385-391.
|
|
|
|
| [5] |
Unitree Aliengo[EB/OL]. 杭州: 杭州宇树科技有限公司, 2019 (2019-05-20) [2024-10-21]. https://www.unitree.com/cn/aliengo.
|
|
Unitree Aliengo[EB/OL]. Hangzhou: Hangzhou Yushu Technology CO., LTD., 2019 (2019-05-20) [2024-10-21]. https://www.unitree.com/cn/aliengo. in Chinese)
|
|
| [6] |
绝影 X30[EB/OL]. 杭州: 杭州云深处科技有限公司, 2023 (2023-10-09) [2024-10-21]. https://www.deeprobotics.cn/robot/index/product3.html.
|
|
Jueying X30[EB/OL]. Hangzhou: Hangzhou Yunshenchu Technology Co., Ltd., 2023 (2023-10-09) [2024-10-21]. https://www.deeprobotics.cn/robot/index/product3.html. in Chinese)
|
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
张秀丽, 谭小康, 吴海波. 可变刚度的四足机器人被动柔顺脊柱设计与应用[J]. 北京交通大学学报, 2018, 42(6):111-118.
doi: 10.11860/j.issn.1673-0291.2018.06.016 |
|
doi: 10.11860/j.issn.1673-0291.2018.06.016 |
|
| [22] |
雷静桃, 俞煌颖. 四足机器人气动人工肌肉驱动的仿生柔性机体动力学分析[J]. 上海交通大学学报, 2014, 48(12):1688-1693.
|
|
|
|
| [23] |
|
| [24] |
李庆中, 李晓丹, 于福杰, 等. 介电弹性体式蛙型仿生软体机器人设计[J]. 兵工学报, 2022, 43(1):140-147.
|
|
doi: 10.3969/j.issn.1000-1093.2022.01.015 |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
廖峻北, 伊烁闻, 雷飞, 等. 连续变刚度仿生驱动关节的设计与建模分析[J]. 兵工学报, 2023, 44(11):3269-3278.
doi: 10.12382/bgxb.2023.0730 |
|
doi: 10.12382/bgxb.2023.0730 |
|
| [29] |
刘思宇, 廖峻北, 雷飞, 等. 用于四足机器人的并联弹性腿足关节设计与优化[J]. 兵工学报, 2024, 44(增刊2):71-83.
|
|
doi: 10.12382/bgxb.2023.0897 |
|
| [30] |
doi: 10.1038/s41598-021-88879-0 pmid: 33953253 |
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
蔡润斌. 四足机器人运动规划及协调控制[D]. 长沙: 国防科学技术大学, 2013.
|
|
|
|
| [35] |
|
| [1] | ZHAO Wei, WANG Feng, MA Xingyu, ZHAI Weiguang, MENG Pengshuai. Visual SLAM Algorithm Based on Dynamic Region Exclusion and Dense Map Construction [J]. Acta Armamentarii, 2025, 46(3): 240217-. |
| [2] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(12): 4372-4382. |
| [3] | XING Boyang, XU Wei, LI Yufeng, ZHAO Haoyu, WANG Kang, YAN Tong. Model Predictive Control for Wheeled L-quadruped Robots Based on Hierarchical Decoupling [J]. Acta Armamentarii, 2024, 45(12): 4272-4282. |
| [4] | LI Zhong, GUAN Xiaorong, LI Huibin, HE Long, LONG Yi. Research Status and Key Technology Analysis of Active Rigid Lower Limb Assisted Exoskeleton [J]. Acta Armamentarii, 2024, 45(S1): 262-270. |
| [5] | Li Huibin, MA He, LIU Pengfei, YANG Peiying, GUAN Xiaorong. Current Development and Prospects of Wearable Supernumerary Robotic Limbs for Military Applications [J]. Acta Armamentarii, 2024, 45(S1): 287-295. |
| [6] | DANG Wanying, ZHOU Lelai, LI Yibin, ZHANG Chen. Neural Network Planning Method for Optimal Off-road Configuration of Modular Robots [J]. Acta Armamentarii, 2024, 45(10): 3674-3685. |
| [7] | SUN Pengyao, HUANG Yanyan, WANG Kaisheng. Two-dimensional Global Path Planning Based on Potential Field Enhanced Fireworks Algorithm [J]. Acta Armamentarii, 2024, 45(10): 3499-3518. |
| [8] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [9] | LIU Yali, LU Yanchi, XU Xiaolong, SONG Qiuzhi. A Review of the Evaluation Methods of Assisting Effectiveness of Exoskeleton Robot and Its Applications [J]. Acta Armamentarii, 2024, 45(8): 2497-2519. |
| [10] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [11] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [12] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [13] | YUE Shengzhe, WANG Zhengjie. A SLAM in Dynamic Environment Based on Instance Segmentation and Optical Flow [J]. Acta Armamentarii, 2024, 45(1): 156-165. |
| [14] | SU Zhibao, XIANG Shen, YU Xuewei, AN Xuyang. A Simulation System for Cooperative Control of Autonomous Convoy [J]. Acta Armamentarii, 2023, 44(S2): 35-43. |
| [15] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||