
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (10): 3499-3518.doi: 10.12382/bgxb.2023.0697
Previous Articles Next Articles
SUN Pengyao, HUANG Yanyan*( ), WANG Kaisheng
), WANG Kaisheng
Received:2023-07-26
Online:2023-11-08
Contact:
HUANG Yanyan
CLC Number:
SUN Pengyao, HUANG Yanyan, WANG Kaisheng. Two-dimensional Global Path Planning Based on Potential Field Enhanced Fireworks Algorithm[J]. Acta Armamentarii, 2024, 45(10): 3499-3518.

Fig.1 Flowchart of PEFWA
| 函数 | 表达式 | 范围 |
|---|---|---|
| Sphere | f(x)= ∑i=1Dx2i | [-100,100] |
| Rosenbrock | f(x)= ∑i=1D-1(100 (xi+1-x2i)2+ (xi-1)2) | [-30,30] |
| Griewank | f(x)=1+ ∑i=1Dx2i4000+ ∏i=1Dcos ( xi√i) | [-600,600] |
| Rastrigin | f(x)= ∑i=1D( x2i-10cos (2πxi)+10) | [-5.12,5.12] |
| Ackley | f(x)= -20exp (-0.2 √1D∑i=1Dx2i)- exp ( 1D∑i=1Dcos (2πxi))+20+e | [-32,32] |
| Rotated hyper ellipsoid | f(x)= ∑i=1D( ∑j=1ix2j)2 | [-65.536, 65.536] |
| Axis parallel hyper ellipsoid | f(x)= ∑i=1Di x2i | [-5.12,5.12] |
| Sphere_p | f(x)= ∑i=1Dx2i+1000× N|xi|≤1 | [-100,100] |
Table 1 Testing functions
| 函数 | 表达式 | 范围 |
|---|---|---|
| Sphere | f(x)= ∑i=1Dx2i | [-100,100] |
| Rosenbrock | f(x)= ∑i=1D-1(100 (xi+1-x2i)2+ (xi-1)2) | [-30,30] |
| Griewank | f(x)=1+ ∑i=1Dx2i4000+ ∏i=1Dcos ( xi√i) | [-600,600] |
| Rastrigin | f(x)= ∑i=1D( x2i-10cos (2πxi)+10) | [-5.12,5.12] |
| Ackley | f(x)= -20exp (-0.2 √1D∑i=1Dx2i)- exp ( 1D∑i=1Dcos (2πxi))+20+e | [-32,32] |
| Rotated hyper ellipsoid | f(x)= ∑i=1D( ∑j=1ix2j)2 | [-65.536, 65.536] |
| Axis parallel hyper ellipsoid | f(x)= ∑i=1Di x2i | [-5.12,5.12] |
| Sphere_p | f(x)= ∑i=1Dx2i+1000× N|xi|≤1 | [-100,100] |
| 函数 | 类别 | PEFWA | FWA | PSO算法 | GA |
|---|---|---|---|---|---|
| Sphere | 平均值 | 6.16×10-162 | 1.07×10-157 | 2.10×10-1 | 1.91×10-4 |
| SD | 1.79×10-161 | 3.22×10-157 | 1.28×10-1 | 5.87×10-5 | |
| Rosenbrock | 平均值 | 0.0031 | 28.6666 | 347.9364 | 45.4041 |
| SD | 0.0094 | 0.3433 | 410.7480 | 27.6569 | |
| Griewank | 平均值 | 0.0027 | 0.0376 | 0.0642 | 0.6784 |
| SD | 0.0007 | 0.0229 | 0.0193 | 0.3794 | |
| Rastrigin | 平均值 | 0 | 0 | 63.8890 | 0.0427 |
| SD | 0 | 0 | 12.2414 | 0.0220 | |
| Ackley | 平均值 | 4.35×10-15 | 4.44×10-16 | 3.2212 | 0.0108 |
| SD | 1.07×10-15 | 0 | 0.5522 | 0.0021 | |
| Rotated hyper ellipsoid | 平均值 | 1.72×10-308 | 2.96×10-323 | 1.3955 | 3.40×10-7 |
| SD | 0 | 0 | 0.6911 | 3.69×10-7 | |
| Axis parallel hyper ellipsoid | 平均值 | 5.78×10-164 | 9.17×10-160 | 0.3875 | 8.26×10-4 |
| SD | 0 | 2.75×10-159 | 0.2871 | 2.74×10-4 | |
| Sphere_p | 平均值 | 30.0007 | 257.4851 | 153.4725 | 1.7347×104 |
| SD | 0.0008 | 110.5706 | 46.2182 | 2.5749×103 |
Table 2 Comparison of function test results
| 函数 | 类别 | PEFWA | FWA | PSO算法 | GA |
|---|---|---|---|---|---|
| Sphere | 平均值 | 6.16×10-162 | 1.07×10-157 | 2.10×10-1 | 1.91×10-4 |
| SD | 1.79×10-161 | 3.22×10-157 | 1.28×10-1 | 5.87×10-5 | |
| Rosenbrock | 平均值 | 0.0031 | 28.6666 | 347.9364 | 45.4041 |
| SD | 0.0094 | 0.3433 | 410.7480 | 27.6569 | |
| Griewank | 平均值 | 0.0027 | 0.0376 | 0.0642 | 0.6784 |
| SD | 0.0007 | 0.0229 | 0.0193 | 0.3794 | |
| Rastrigin | 平均值 | 0 | 0 | 63.8890 | 0.0427 |
| SD | 0 | 0 | 12.2414 | 0.0220 | |
| Ackley | 平均值 | 4.35×10-15 | 4.44×10-16 | 3.2212 | 0.0108 |
| SD | 1.07×10-15 | 0 | 0.5522 | 0.0021 | |
| Rotated hyper ellipsoid | 平均值 | 1.72×10-308 | 2.96×10-323 | 1.3955 | 3.40×10-7 |
| SD | 0 | 0 | 0.6911 | 3.69×10-7 | |
| Axis parallel hyper ellipsoid | 平均值 | 5.78×10-164 | 9.17×10-160 | 0.3875 | 8.26×10-4 |
| SD | 0 | 2.75×10-159 | 0.2871 | 2.74×10-4 | |
| Sphere_p | 平均值 | 30.0007 | 257.4851 | 153.4725 | 1.7347×104 |
| SD | 0.0008 | 110.5706 | 46.2182 | 2.5749×103 |

Fig.2 Change curves of average fitness value
| 参数 | 数值 |
|---|---|
| 规划空间范围/km | 100×100 |
| 基地坐标/km | (0,0) |
| 目标点坐标/km | (100,100) |
| 各节点位置与威胁障碍 范围(x,y,r)/km | (42,50,20); (15,12,10); (66,77,15); (40,15,12); (98,80,15); (15,85,18); (10,50,11); (80,10,10); (83,40,15); |
| 最大循环次数T | 500 |
| 惩罚算子Fpenalty | 500 |
| 烟花数量NF | 30 |
| 基础烟花算法爆炸参数 | AE=100,SE=20,a=0.2, b=0.8, SGi=3 |
| 基础烟花算法固定 优化维数 | 30 |
| 相邻路径点距离约束 [lmin ,lmax ] | [1,2] |
| 势场增强火花参数 | Sθ=3,SPF=3 |
| 交叉变异参数 | SC=50 |
| 改进选择策略参数 | ρCH=0.99,NU=10,NFS=20, NIS=10,bCH=0.8 |
Table 3 Parameters of improved module validation experiments
| 参数 | 数值 |
|---|---|
| 规划空间范围/km | 100×100 |
| 基地坐标/km | (0,0) |
| 目标点坐标/km | (100,100) |
| 各节点位置与威胁障碍 范围(x,y,r)/km | (42,50,20); (15,12,10); (66,77,15); (40,15,12); (98,80,15); (15,85,18); (10,50,11); (80,10,10); (83,40,15); |
| 最大循环次数T | 500 |
| 惩罚算子Fpenalty | 500 |
| 烟花数量NF | 30 |
| 基础烟花算法爆炸参数 | AE=100,SE=20,a=0.2, b=0.8, SGi=3 |
| 基础烟花算法固定 优化维数 | 30 |
| 相邻路径点距离约束 [lmin ,lmax ] | [1,2] |
| 势场增强火花参数 | Sθ=3,SPF=3 |
| 交叉变异参数 | SC=50 |
| 改进选择策略参数 | ρCH=0.99,NU=10,NFS=20, NIS=10,bCH=0.8 |

Fig.3 Results of path planning in Experiment 1
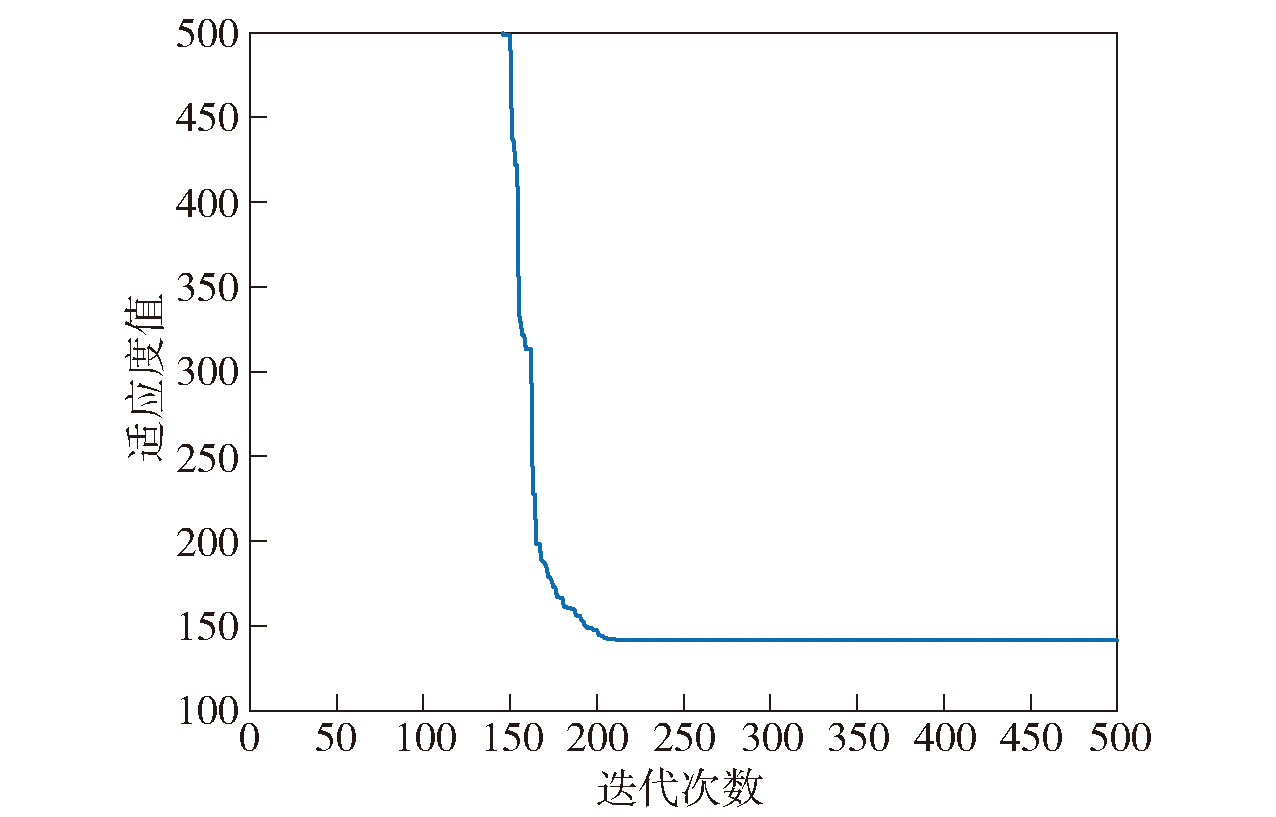
Fig.4 Convergence plot for Experiment 1
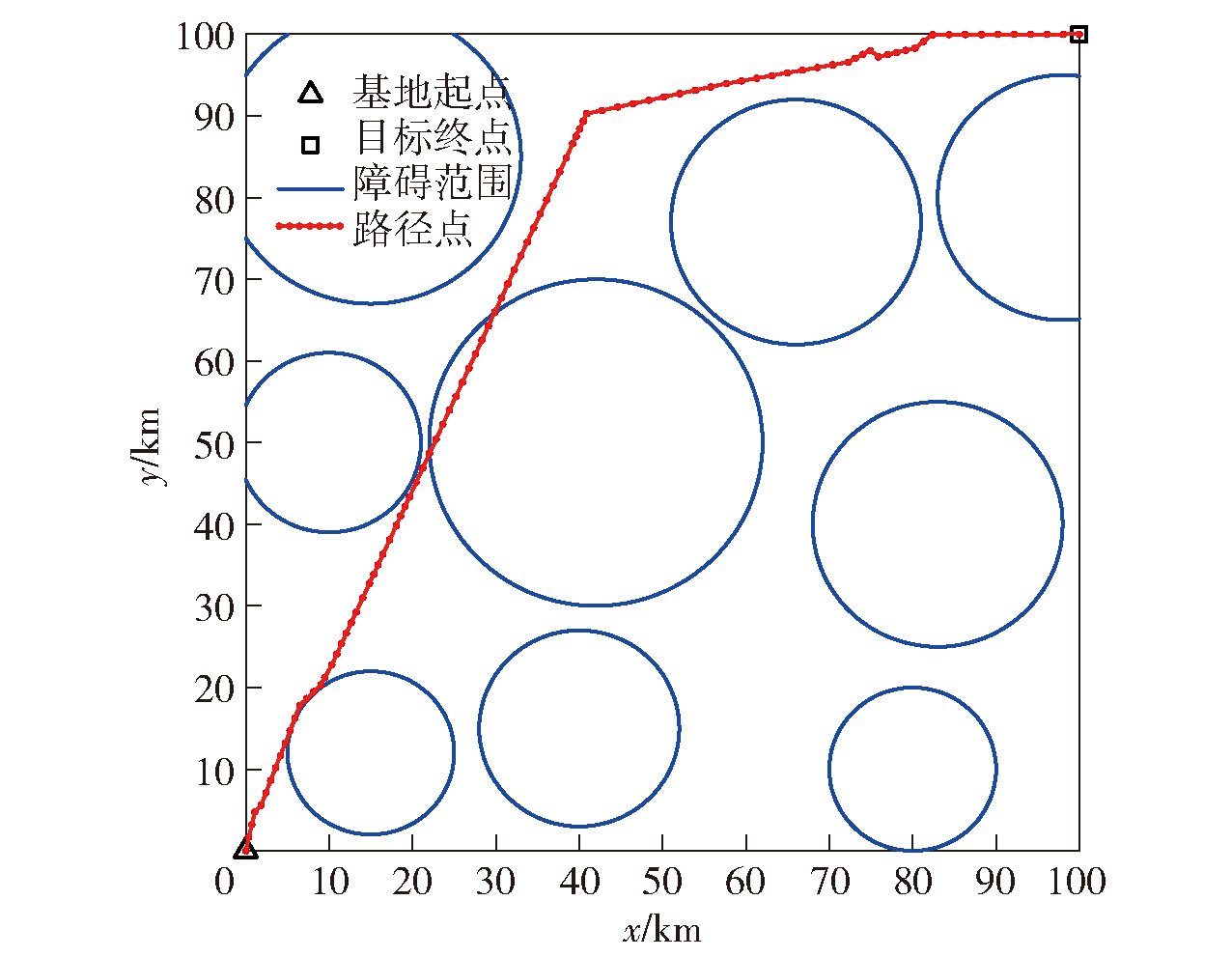
Fig.5 Results of path planning in Experiment 2
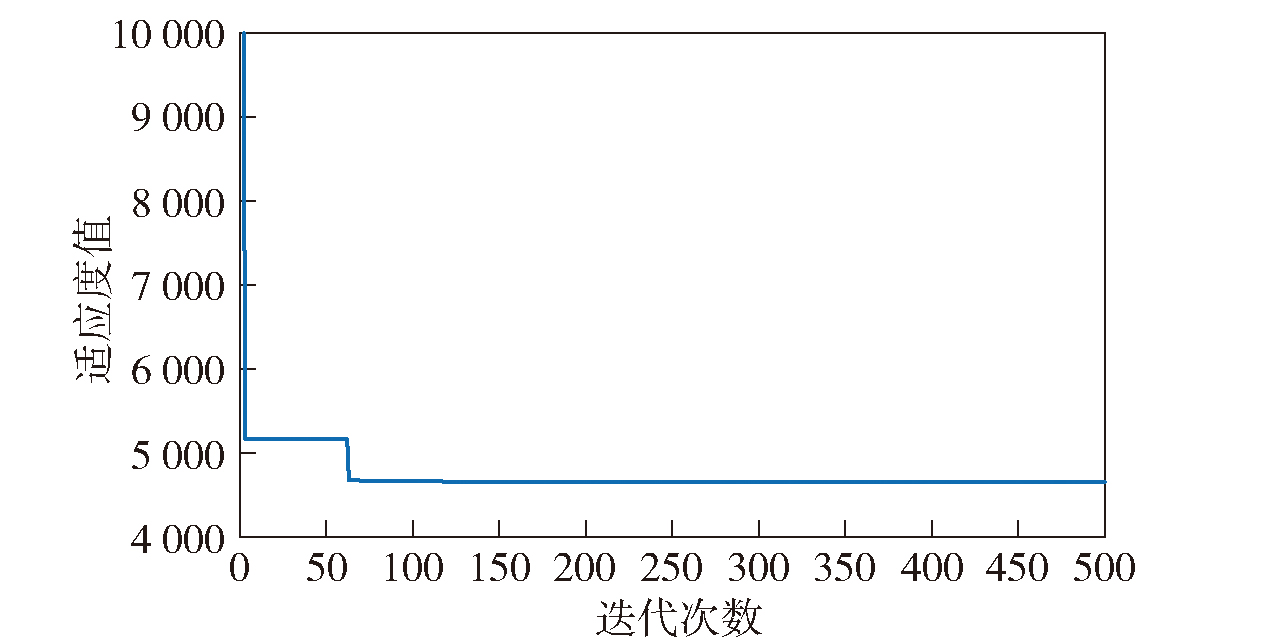
Fig.6 Convergence plot for Experiment 2

Fig.7 Results of path planning in Experiment 3

Fig.8 Results of path planning in Experiment 4

Fig.9 Schematic diagram of similar paths

Fig.10 Illustrations of part of the selected fireworks

Fig.11 Results of path planning in Experiment 5

Fig.12 Illustrations of part of the selected fireworks

Fig.13 Results of path planning in Experiment 6

Fig.14 Comparison of the average fitness changes of multiple experiments
| 序号 | RoS/% | ¯F | σ2( ¯F) | ¯Tf | σ2(Tf) | ¯ρ |
|---|---|---|---|---|---|---|
| 2 | 0 | |||||
| 3 | 94 | 157.76 | 7.38 | 126.98 | 8134.64 | 0.958 |
| 4 | 100 | 155.80 | 0.65 | 40.3 | 295.43 | 0.960 |
| 5 | 100 | 152.74 | 0.27 | 8.04 | 4.42 | 0.992 |
| 6 | 100 | 151.58 | 0.10 | 6.68 | 1.80 | 0.998 |
Table 4 Parameters of improved module validation experiments
| 序号 | RoS/% | ¯F | σ2( ¯F) | ¯Tf | σ2(Tf) | ¯ρ |
|---|---|---|---|---|---|---|
| 2 | 0 | |||||
| 3 | 94 | 157.76 | 7.38 | 126.98 | 8134.64 | 0.958 |
| 4 | 100 | 155.80 | 0.65 | 40.3 | 295.43 | 0.960 |
| 5 | 100 | 152.74 | 0.27 | 8.04 | 4.42 | 0.992 |
| 6 | 100 | 151.58 | 0.10 | 6.68 | 1.80 | 0.998 |

Fig.15 Comparison of optimal path results of different algorithms
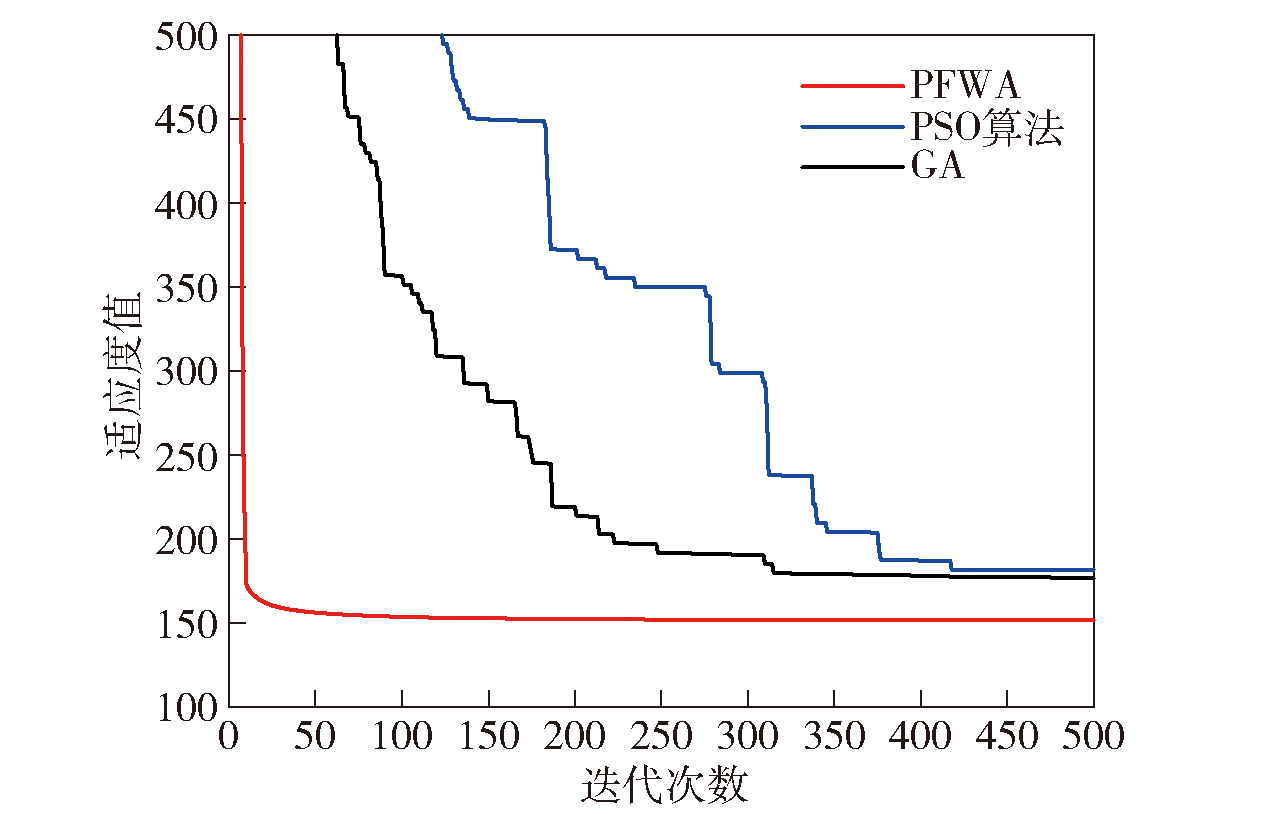
Fig.16 Comparison of average fitness changes of different algorithms
| 算法 | RoS/% | ¯F | σ2( ¯F) | ¯Tf | σ2(Tf) | ¯ρ |
|---|---|---|---|---|---|---|
| PSO算法 | 91 | 181.60 | 1758.47 | 46.68 | 5232.79 | 0.963 |
| GA | 97 | 176.74 | 125.47 | 46.28 | 2580.37 | 0.983 |
| A*算法 | 100 | 210.15 | 14.17 | 0.954 | ||
| PEFWA | 100 | 151.58 | 0.10 | 6.68 | 1.80 | 0.998 |
Table 5 Results of data statistics for multiple algorithms
| 算法 | RoS/% | ¯F | σ2( ¯F) | ¯Tf | σ2(Tf) | ¯ρ |
|---|---|---|---|---|---|---|
| PSO算法 | 91 | 181.60 | 1758.47 | 46.68 | 5232.79 | 0.963 |
| GA | 97 | 176.74 | 125.47 | 46.28 | 2580.37 | 0.983 |
| A*算法 | 100 | 210.15 | 14.17 | 0.954 | ||
| PEFWA | 100 | 151.58 | 0.10 | 6.68 | 1.80 | 0.998 |
| 参数 | 设定值 |
|---|---|
| 规划空间范围/km | 100×100 |
| 起点坐标/km | (0,0) |
| 目标点坐标/km | (100,100) |
| 各障碍空间范围 (x/km,y/km),q) | (61,100,1);(61,6,1);(69,6,1);(69,100,1); (41,79,2);(41,0,2);(49,0,2);(49,79,2); (6,26,3);(31,26,3);(31,6,3);(34,6,3); (34,29,3);(6,29,3);(6,79,4);(6,51,4); (34,51,4);(34,54,4);(9,54,4);(9,79,4); (76,11,5);(94,11,5);(94,39,5);(76,39,5); (76,46,6);(84,46,6);(84,100,6);(76,100,6) |
| T | 500 |
| Fpenalty | 500 |
| NF | 30 |
| 爆炸参数 | AE=100,SE=20,a=0.2,b=0.8, |
| 相邻路径点距离约束 | [lmin ,lmax ]=[1,2] |
| 势场增强火花参数 | Sθ=3,SPF=3 |
| SC | 50 |
| 改进选择策略参数 | ρCH=0.99,NU=10,NFS=15, NIS=5,bCH=0.6 |
Table 6 Complex obstacle environment parameters
| 参数 | 设定值 |
|---|---|
| 规划空间范围/km | 100×100 |
| 起点坐标/km | (0,0) |
| 目标点坐标/km | (100,100) |
| 各障碍空间范围 (x/km,y/km),q) | (61,100,1);(61,6,1);(69,6,1);(69,100,1); (41,79,2);(41,0,2);(49,0,2);(49,79,2); (6,26,3);(31,26,3);(31,6,3);(34,6,3); (34,29,3);(6,29,3);(6,79,4);(6,51,4); (34,51,4);(34,54,4);(9,54,4);(9,79,4); (76,11,5);(94,11,5);(94,39,5);(76,39,5); (76,46,6);(84,46,6);(84,100,6);(76,100,6) |
| T | 500 |
| Fpenalty | 500 |
| NF | 30 |
| 爆炸参数 | AE=100,SE=20,a=0.2,b=0.8, |
| 相邻路径点距离约束 | [lmin ,lmax ]=[1,2] |
| 势场增强火花参数 | Sθ=3,SPF=3 |
| SC | 50 |
| 改进选择策略参数 | ρCH=0.99,NU=10,NFS=15, NIS=5,bCH=0.6 |

Fig.17 Comparison of optimal results of path planning in complex environments

Fig.18 Comparison of average fitness changes of different algorithms in complex environments
| 算法 | RoS/% | ¯F | σ2( ¯F) | ¯Tf | σ2(Tf) | ¯ρ |
|---|---|---|---|---|---|---|
| PEFWA | 100 | 294.05 | 7.06 | 22.86 | 156.75 | 0.9976 |
| A*算法 | 100 | 389.34 | 35.83 | 0.9977 |
Table 7 Results of data statistics for multiple algorithms in complex environment
| 算法 | RoS/% | ¯F | σ2( ¯F) | ¯Tf | σ2(Tf) | ¯ρ |
|---|---|---|---|---|---|---|
| PEFWA | 100 | 294.05 | 7.06 | 22.86 | 156.75 | 0.9976 |
| A*算法 | 100 | 389.34 | 35.83 | 0.9977 |
| [1] |
李超, 王瑞星, 黄建忠, 等. 稀疏奖励下基于强化学习的无人集群自主决策与智能协同[J]. 兵工学报, 2023, 44(6): 1537-1546.
doi: 10.12382/bgxb.2022.0177 |
|
doi: 10.12382/bgxb.2022.0177 |
|
| [2] |
张哲, 吴剑, 代冀阳, 等. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12): 2530-2539.
doi: 10.3969/j.issn.1000-1093.2020.12.019 |
|
|
|
| [3] |
袁静妮, 杨林, 唐晓峰, 等. 基于改进RRT*与行驶轨迹优化的智能汽车运动规划[J]. 自动化学报, 2022, 48(12): 2941-2950.
|
|
|
|
| [4] |
孙鹏耀, 黄炎焱, 潘尧. 基于改进势场法的移动机器人路径规划[J]. 兵工学报, 2020, 41(10): 2106-2121.
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
doi: 10.3969/j.issn.1000-1093.2020.10.021 |
|
| [5] |
赵鹏程, 宋保维, 毛昭勇, 等. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10): 2598-2608.
|
|
doi: 10.12382/bgxb.2021.0474 |
|
| [6] |
张瑜, 宋荆洲, 张琪祁. 基于改进动态窗口法的户外清扫机器人局部路径规划[J]. 机器人, 2020, 42(5): 617-625.
doi: 10.13973/j.cnki.robot.190649 |
|
doi: 10.13973/j.cnki.robot.190649 |
|
| [7] |
高明, 唐洪, 张鹏. 机器人集群路径规划技术研究现状[J]. 国防科技大学学报, 2021, 43(1): 127-138.
|
|
|
|
| [8] |
李波, 杨志鹏, 贾卓然, 等. 一种无监督学习型神经网络的无人机全区域侦察路径规划[J]. 西北工业大学学报, 2021, 39(1): 77-84.
|
|
|
|
| [9] |
|
| [10] |
张震, 方群, 宋金丰, 等. 基于协同粒子群算法的航天器集群动态路径规划算法研究[J]. 西北工业大学学报, 2021, 39(6): 1222-1232.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
余冬华, 郭茂祖, 刘晓燕, 等. 改进选择策略的烟花算法[J]. 控制与决策, 2020, 35(2): 389-395.
|
|
|
|
| [14] |
滕志军, 李哲, 王幸幸, 等. 无线传感器网络中基于μ律爆炸算子的烟花虚拟力混合覆盖策略[J]. 控制理论与应用, 2023, 40(5): 817-824.
|
|
|
|
| [15] |
邹适宇, 李复名, 谢爱平, 等. 基于改进烟花算法的资源分配[J]. 航空学报, 2021, 42(12): 324716.
doi: 10.7527/S1000-6893.2020.24716 |
|
doi: 10.7527/S1000-6893.2020.24716 |
|
| [16] |
余修武, 李佩, 刘永, 等. 基于烟花优化的WSN数据融合算法[J]. 华中科技大学学报, 2023, 51(5): 112-118.
|
|
|
|
| [17] |
申晓宁, 许笛, 宋丽妍, 等. 采用离散烟花算法的移动群智感知异构任务分配[J]. 计算机工程与科学, 2023, 45(2): 321-331.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
薛裕颖, 张祥银, 张国梁, 等. 基于量子行为烟花算法的移动机器人路径规划及平滑[J]. 控制理论与应用, 2019, 36(9): 1398-1408.
|
|
|
|
| [21] |
张玮, 马焱, 赵捍东, 等. 基于改进烟花-蚁群混合算法的智能移动体避障路径规划[J]. 控制与决策, 2019, 34(2): 335-343.
|
|
|
|
| [22] |
|
| [1] | XING Boyang, XU Wei, LI Yufeng, ZHAO Haoyu, WANG Kang, YAN Tong. Model Predictive Control for Four-Wheeled Legged Robots Based on Hierarchical Decoupling [J]. Acta Armamentarii, 0, (): 0-0. |
| [2] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 0, (): 0-0. |
| [3] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [4] | SU Zhibao, XIANG Shen, YU Xuewei, AN Xuyang. A Simulation System for Cooperative Control of Autonomous Convoy [J]. Acta Armamentarii, 2023, 44(S2): 35-43. |
| [5] | JIANG Chenxing, YAO Qichang, XU Peng, ZHOU Yuting, YAN Tong. The Transformation of Quadruped and Biped Robot Technologies under the New Technological Situation [J]. Acta Armamentarii, 2023, 44(S2): 84-89. |
| [6] | JU Shuang, WANG Jing, WANG Hao, ZHOU Meng. Formation Reconfiguration Control of Multiple Mobile Robots with Severe Actuator Faults Based on GWO-WOA [J]. Acta Armamentarii, 2023, 44(S2): 114-125. |
| [7] | LI Caoyan, GUO Zhenchuan, ZHENG Dongdong, WEI Yanling. Multi-robot Cooperative Formation Based on Distributed Model Predictive Control [J]. Acta Armamentarii, 2023, 44(S2): 178-190. |
| [8] | CAO Haozhe, LIU Quanpan. Unmanned Swarm Collaborative Visual SLAM Algorithm Based on Semi-direct Method [J]. Acta Armamentarii, 2023, 44(11): 3345-3358. |
| [9] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [10] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [11] | MI Junxia, YU Huilong, XI Junqiang. Prediction of Driver's Lane Changing Behavior Based on MLP-SVM [J]. Acta Armamentarii, 2022, 43(12): 3020-3029. |
| [12] | WU Chao, WU Shaobin, LI Zirui, SUN Dong. Anchor-Free Detection and Tracking System Design Based on Human-Computer Interaction [J]. Acta Armamentarii, 2022, 43(10): 2565-2575. |
| [13] | GONG Shixiong, WANG Xu, KONG Guojie, GONG Jianwei. Methods for Multi-Vehicle Cooperative Object Tracking [J]. Acta Armamentarii, 2022, 43(10): 2429-2442. |
| [14] | YU Haomiao, LIU Chengwei, GUO Chen, JIA Zhaoyan. Finite-time Path-following Controller for UUV Based on PSO-NTSMC [J]. Acta Armamentarii, 2022, 43(8): 1939-1946. |
| [15] | ZHANG Jiawen, FANG Haolin, LI Jiawang. 3D Path Planning of Underactuated AUV Based on Complex Constraints [J]. Acta Armamentarii, 2022, 43(6): 1407-1414. |
| Viewed | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
Full text 2042
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
Abstract 270
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||