
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (11): 3959-3969.doi: 10.12382/bgxb.2023.1168
Previous Articles Next Articles
QIANG Hongbin1,2,3,*( ), DU Liangliang1, KANG Shaopeng1, LIU Kailei1, ZHOU Ling2, ZENG Shuisheng3
), DU Liangliang1, KANG Shaopeng1, LIU Kailei1, ZHOU Ling2, ZENG Shuisheng3
Received:2023-12-07
Online:2024-03-18
Contact:
QIANG Hongbin
CLC Number:
QIANG Hongbin, DU Liangliang, KANG Shaopeng, LIU Kailei, ZHOU Ling, ZENG Shuisheng. Kinematics and Dynamics Modeling of 1T2R Heavy-load Parallel Stabilized Platform with Analytical Solution[J]. Acta Armamentarii, 2024, 45(11): 3959-3969.
Add to citation manager EndNote|Ris|BibTeX
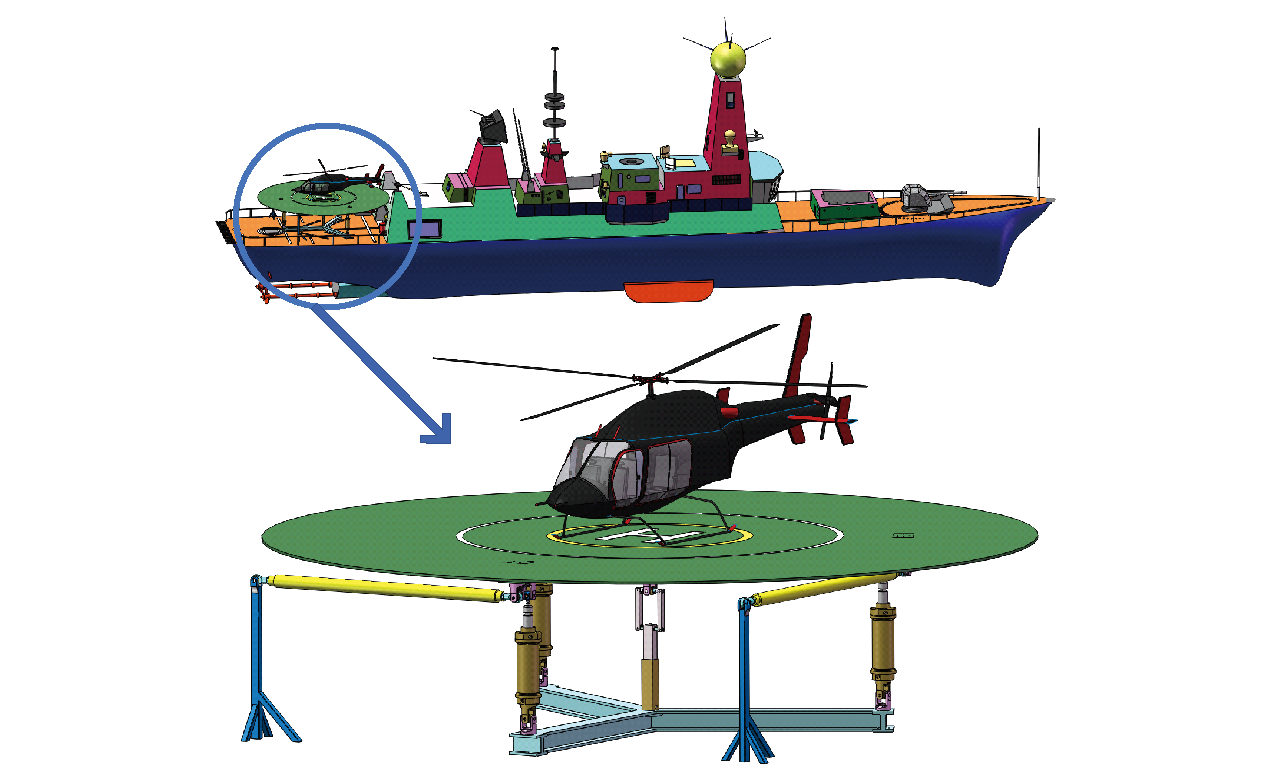
Fig.1 3D model of the stabilized platform
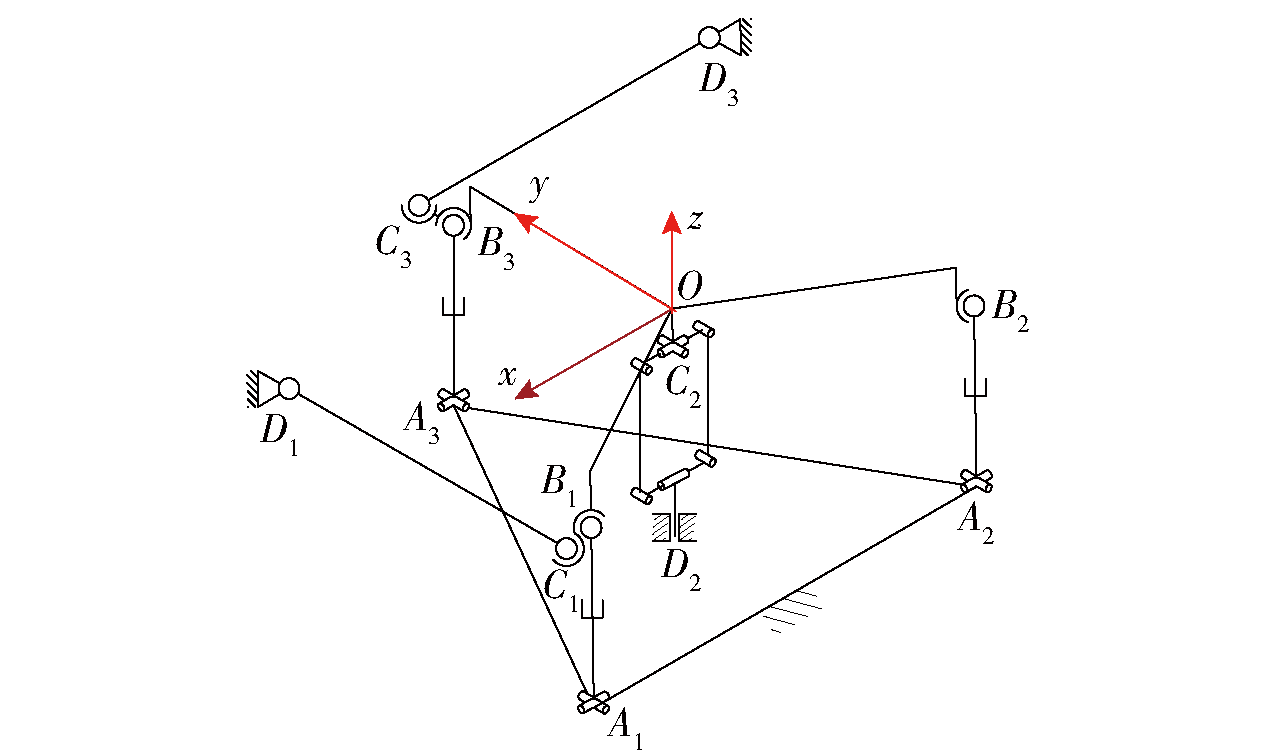
Fig.2 Schematic diagram of theparallel platform of variant 3UPS-PUU-2SS
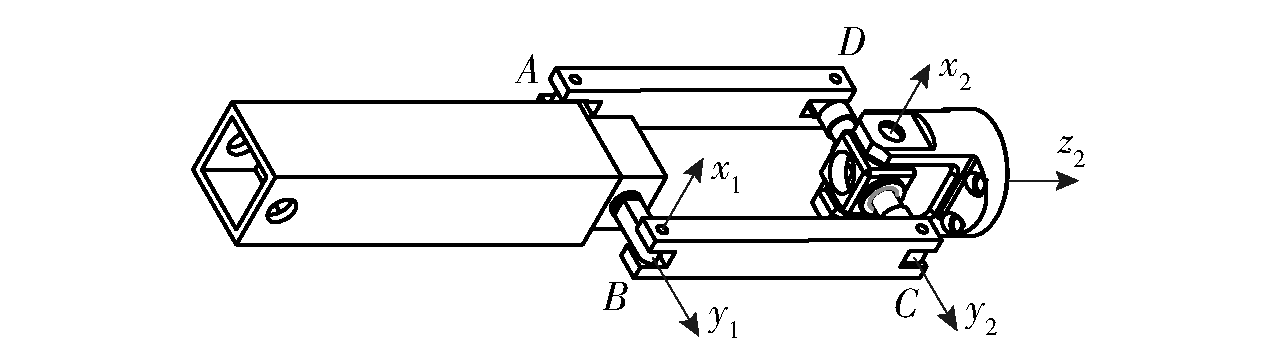
Fig.3 Mutated PUU institutions
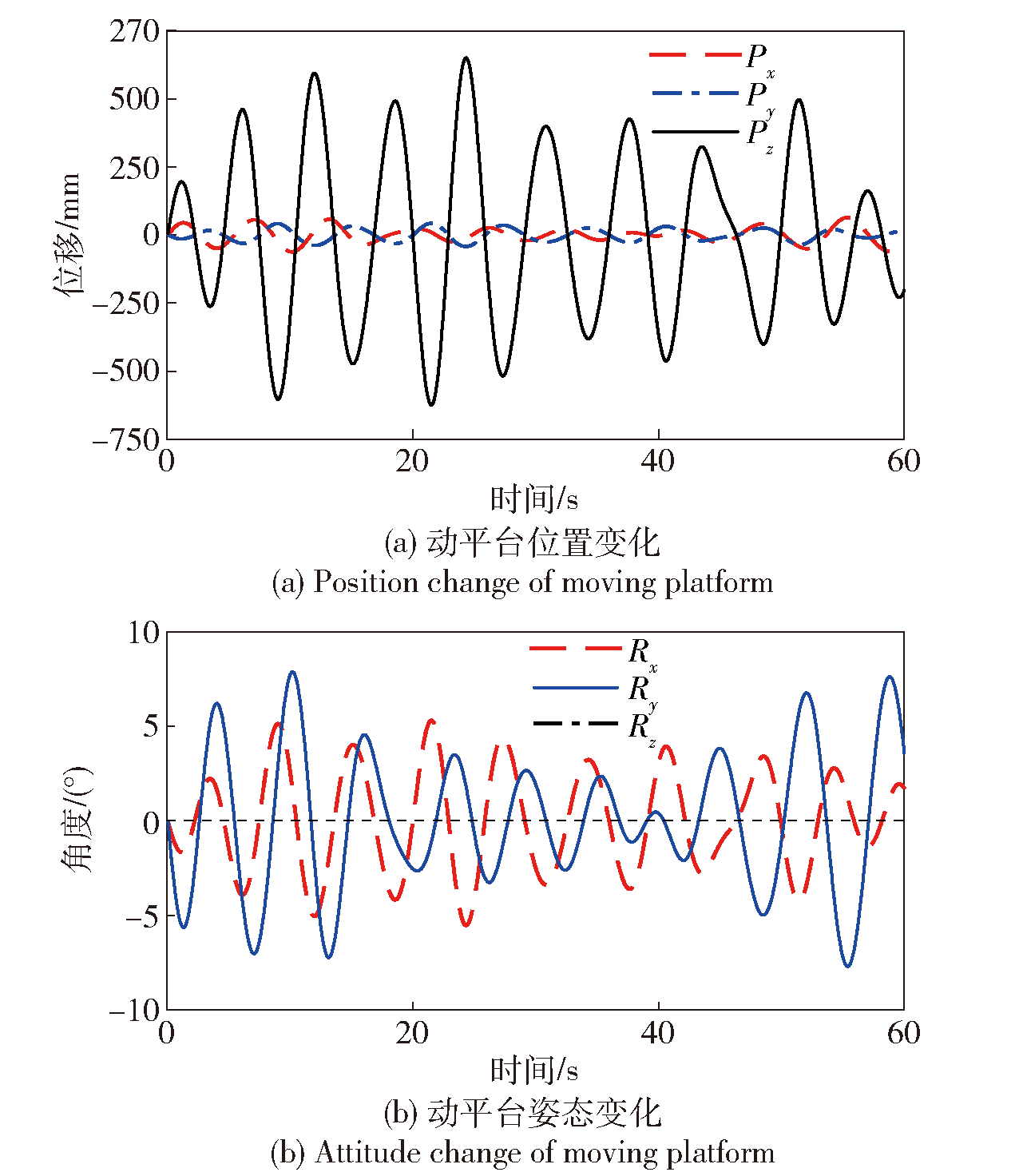
Fig.4 Pose change of moving platform
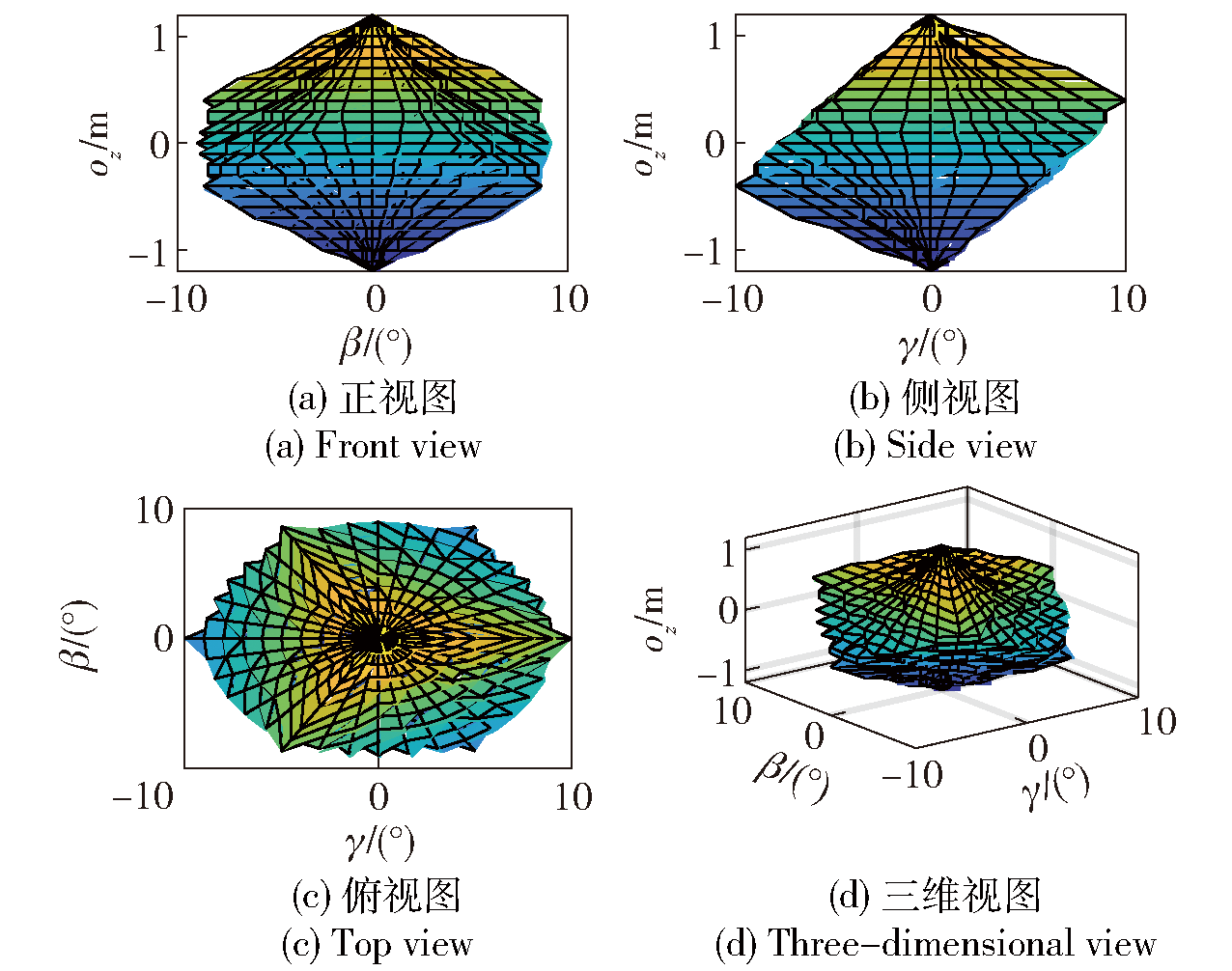
Fig.5 Reachable workspace
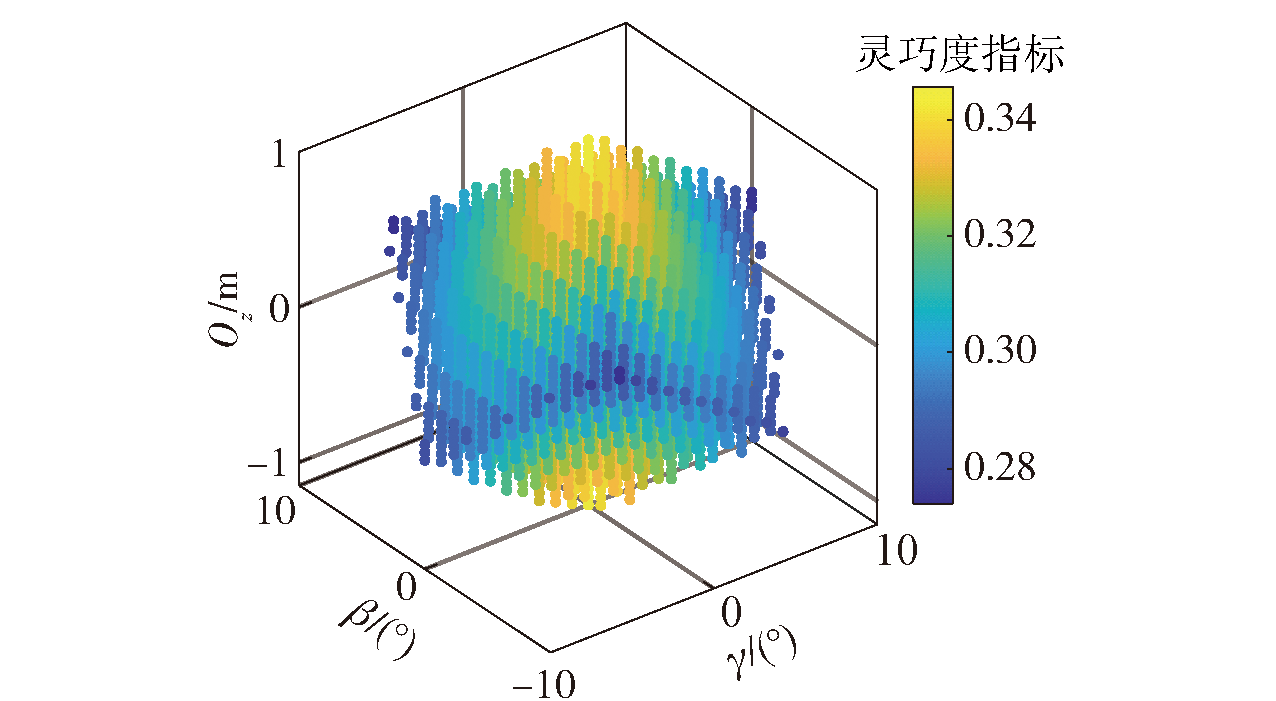
Fig.6 Distribution of dexterity indicators
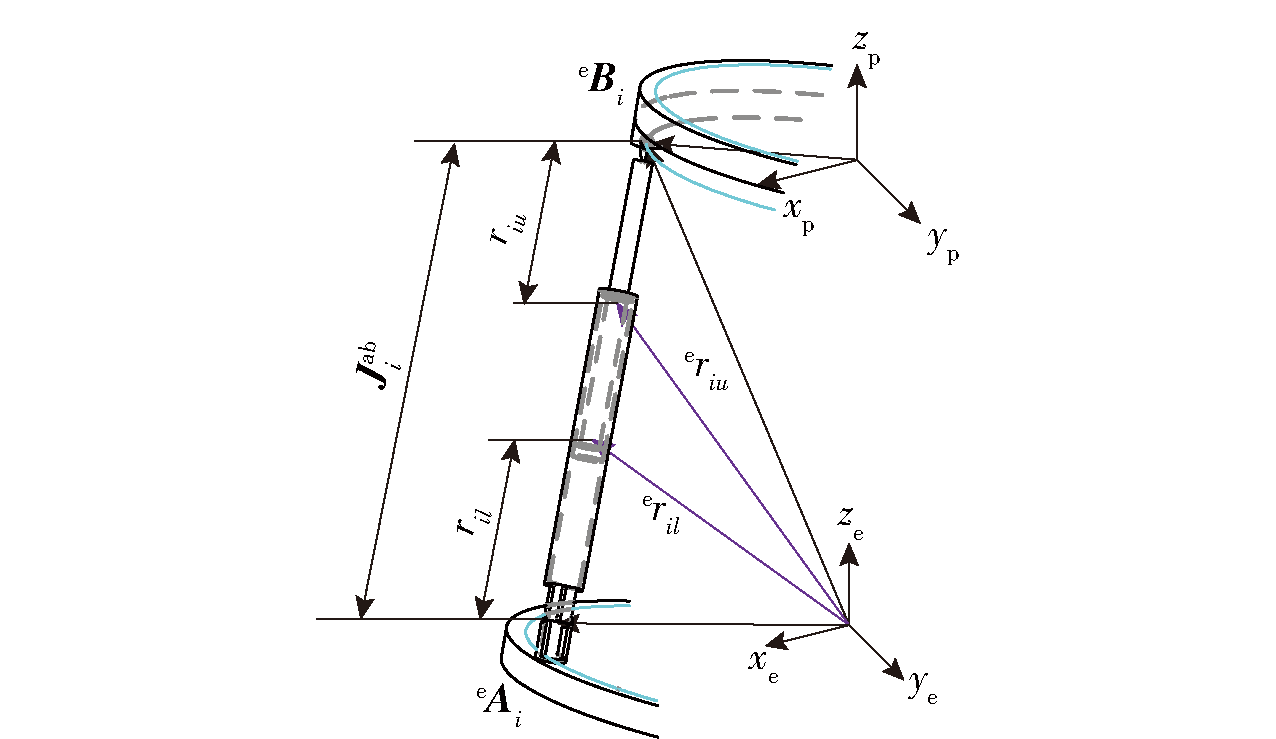
Fig.7 The position and size parameters of stabilizing the ith driving branch chain of the platform
| 运动杆件名称 | 质量/kg |
|---|---|
| 动平台负载(飞机) | 95563.3252 |
| 动平台质量 | 4700.7841 |
| 驱动支链缸筒 | 196.9004 |
| 驱动支链缸杆 | 124.9865 |
| 第1约束杆 | 130.0745 |
| 第2约束杆 | 161.7952 |
| 第3约束杆 | 130.0745 |
Table 1 Quality attributes of stabilized platform
| 运动杆件名称 | 质量/kg |
|---|---|
| 动平台负载(飞机) | 95563.3252 |
| 动平台质量 | 4700.7841 |
| 驱动支链缸筒 | 196.9004 |
| 驱动支链缸杆 | 124.9865 |
| 第1约束杆 | 130.0745 |
| 第2约束杆 | 161.7952 |
| 第3约束杆 | 130.0745 |
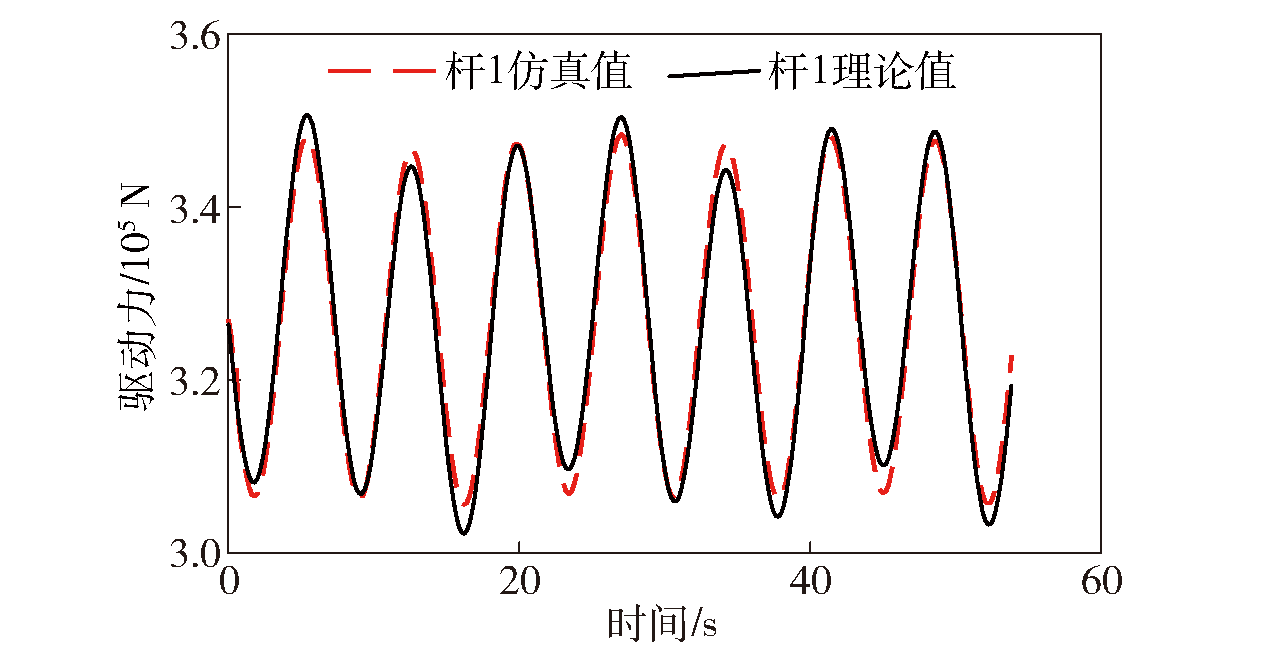
Fig.8 Comparison of the simulated and theoretical driving force curves of the driving rod 1

Fig.9 Comparison of the simulated and theoretical driving force curves of the driving rod 2
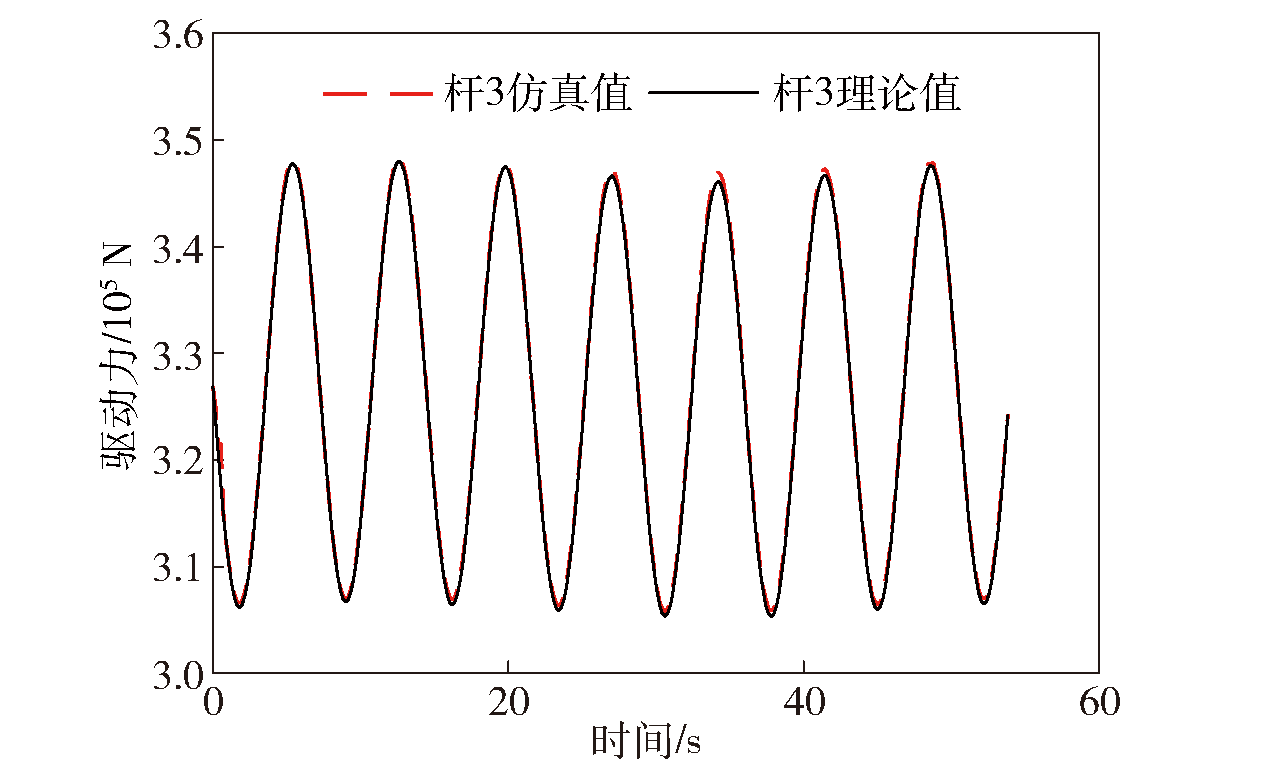
Fig.10 Comparison of the simulated and theoretical driving force curves of the driving rod 3
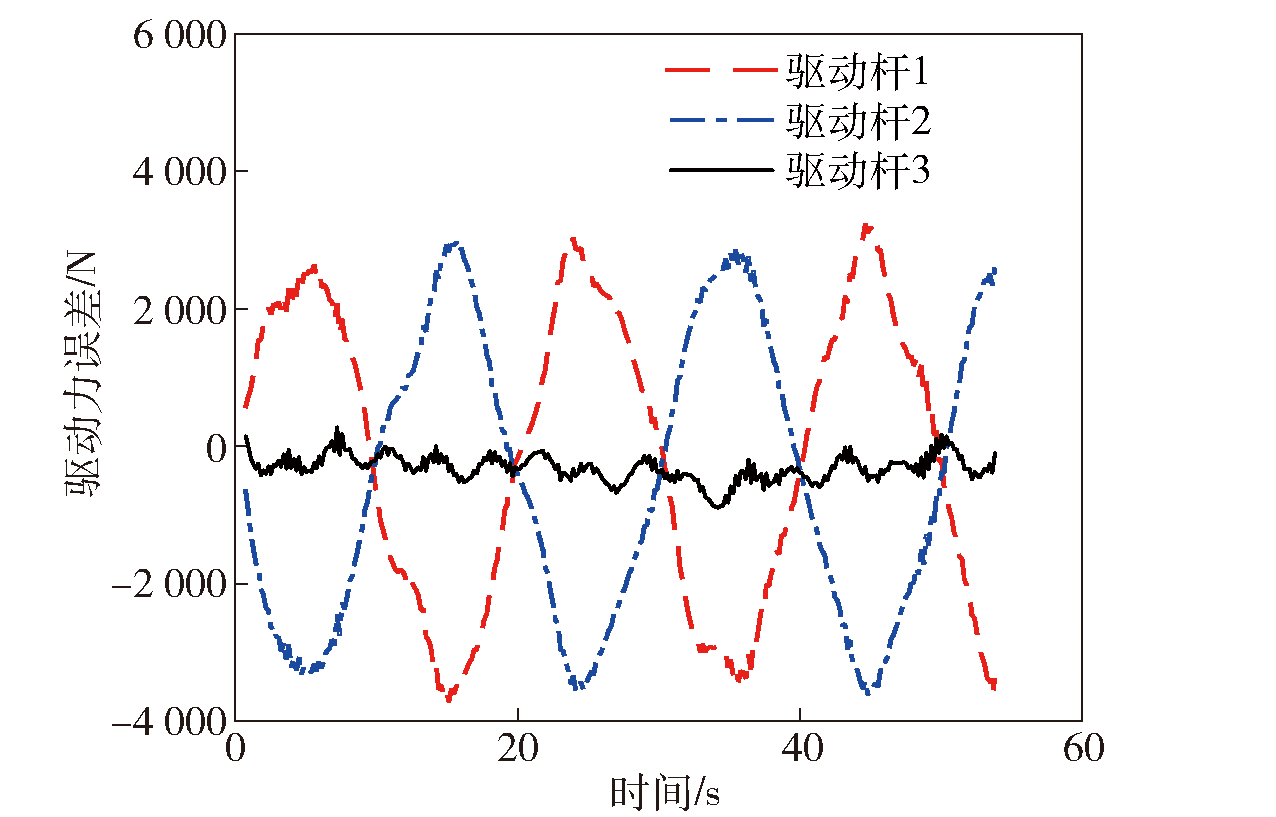
Fig.11 Simulated and theoretical driving force errors
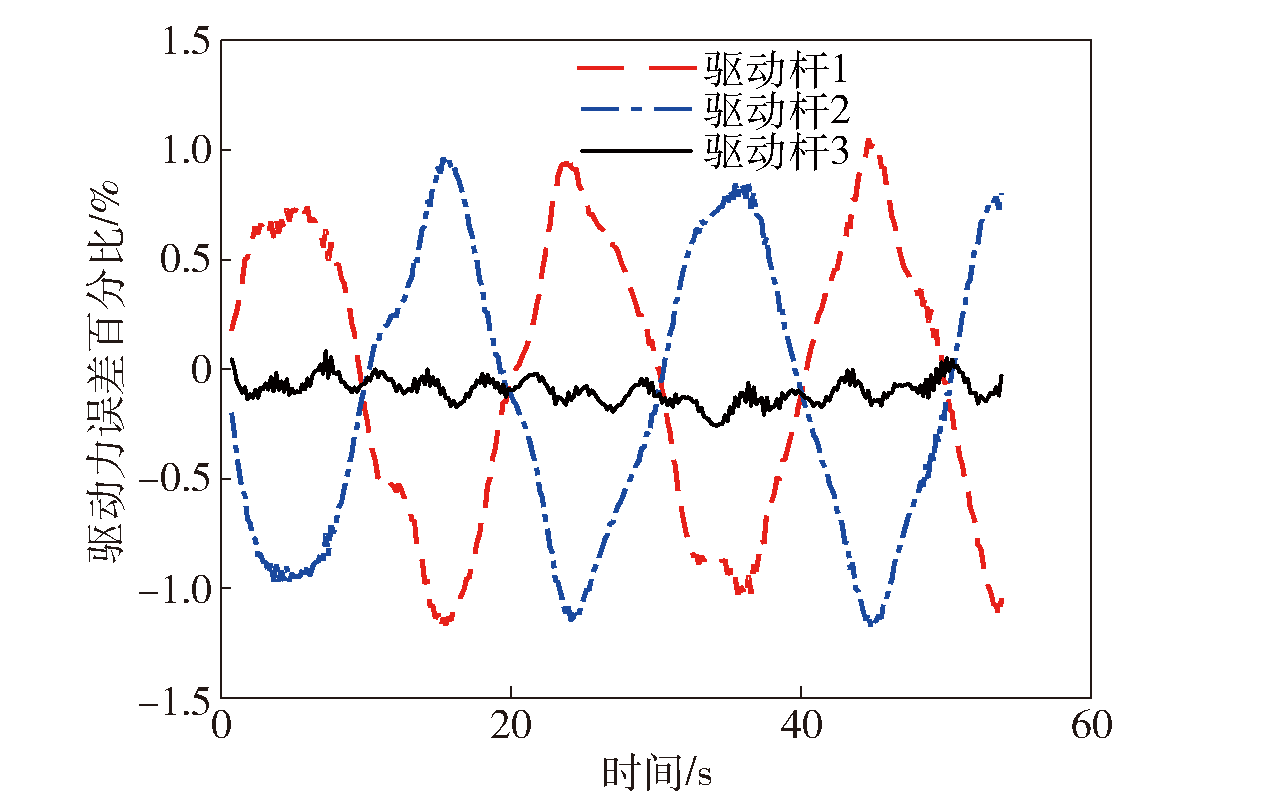
Fig.12 Percentage errors of the simulated and theoretical driving force curves
| [1] |
刘晓, 赵铁石, 边辉, 等. 耦合型3自由度并联稳定平台机构动力学分析[J]. 机械工程学报, 2013, 49(1):45-52.
|
|
|
|
| [2] |
王力航. 电液伺服驱动3UPS/S并联稳定平台协调控制研究[D]. 秦皇岛: 燕山大学, 2019.
|
|
|
|
| [3] |
|
| [4] |
王玥玥, 魏延辉, 马天宇, 等. 基于动态权值分配的登乘系统运动规划方法[J]. 华中科技大学学报(自然科学版), 2023, 51(8): 102-108.
|
|
|
|
| [5] |
王生海, 王丙昱, 靳国良, 等. 一种基于液压并联装置的六自由度波浪补偿船载起重机: CN117049395A[P]. (2023-11-14).
|
|
|
|
| [6] | |
|
|
|
| [7] |
Safeway: Walk to work the safe way[EB/OL]. (2024-02-28) [2024-03-14]Van Aalst Marine Compensation Systems official website; http://www.vanaalstmarine.com.
|
| [8] |
刘晓, 赵铁石, 高佳伟. 非惯性系下舰载稳定平台动力学建模及特性分析[J]. 机器人, 2014, 36(4):411-418.
doi: 10.13973/j.cnki.robot.2014.0411 |
|
doi: 10.13973/j.cnki.robot.2014.0411 |
|
| [9] |
|
| [10] |
王立栋, 陈原. 绳驱动刚柔混合式波浪运动补偿机构的运动学建模与碰撞干涉检测[J]. 兵工学报, 2020, 41(4):737-749.
doi: 10.3969/j.issn.1000-1093.2020.04.013 |
|
doi: 10.3969/j.issn.1000-1093.2020.04.013 |
|
| [11] |
赵延治, 赵飞, 杨建涛, 等. 并联6-RUS卫星相机像移补偿机构建模与分析[J]. 中国机械工程, 2016, 27(3):369-375.
|
|
|
|
| [12] |
|
| [13] |
房立丰, 刘安心, 杨廷力, 等. 一平移二转动并联稳定平台拓扑结构设计[J]. 农业机械学报, 2012, 43(2):205-210.
|
|
|
|
| [14] |
|
| [15] |
李二伟, 赵铁石, 王唱, 等. 大型重载并联稳定接货平台动力学建模[J]. 农业机械学报, 2018, 49(3):411-417, 346.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
邱建超, 陈海泉, 仇伟晗, 等. 船载串并混联海上稳定廊桥动力学建模与分析[J]. 中国造船, 2023, 64(1):146-160.
|
|
|
|
| [19] |
|
| [20] |
王力航, 郭菲, 卢文娟, 等. 3UPS/S舰船稳定平台非惯性系动力学建模[J]. 机械工程学报, 2020, 56(1):20-29.
doi: 10.3901/JME.2020.01.020 |
|
doi: 10.3901/JME.2020.01.020 |
|
| [21] |
田文杰, 吕东坡, 张相鹏. 基于性能驱动的船载稳定平台尺度参数优化设计[J]. 机器人, 2023, 45(1):78-88.
|
|
|
|
| [22] |
李豪杰, 张合, 李珂翔, 等. 考虑铰链间隙的水面并联稳定平台动力学分析[J]. 兵工学报, 2017, 38(1):129-134.
doi: 10.3969/j.issn.1000-1093.2017.01.017 |
|
|
|
| [23] |
刘辛军, 汪劲松, 高峰, 等. 并联机器人机构新构型设计的探讨[J]. 中国机械工程, 2001, 12(12):20-23, 4.
|
|
|
|
| [24] |
王世杰, 冯伟, 李铁军, 等. 空间2自由度冗余驱动并联机构运动学性能分析[J]. 机械工程学报, 2022, 58(23):18-27.
doi: 10.3901/JME.2022.23.018 |
|
doi: 10.3901/JME.2022.23.018 |
| [1] | JIANG Tengyao, LI Wei, LEI Yu, HU Xin, WANG Weiwei. Modeling and Resonance Suppression Method for Stabilizing-tracking System of Self-propelled Anti-aircraft Gun [J]. Acta Armamentarii, 2024, 45(9): 3029-3043. |
| [2] | WU Junying, LI Junjian, SHANG Yiping, YANG Lijun, CHEN Lang. Large-scale Molecular Dynamics Simulation of Femtosecond Laser Pulse Ablation on TATB [J]. Acta Armamentarii, 2024, 45(7): 2351-2363. |
| [3] | WU Rui, YU Huilong, DONG Haotian, XI Junqiang. Refined Dynamics Modeling and Simulation of Special Tracked Vehicles [J]. Acta Armamentarii, 2024, 45(5): 1384-1401. |
| [4] | ZHANG Kun, ZHI Xiaoqi, XIAO You, WANG Shuai, LUO Ruiheng, ZHANG Yaoyao, HUANG Yunwei. Theoretical Deduction of Ignition Position and Temperature of Two-dimensional Slow Cook-off Model [J]. Acta Armamentarii, 2024, 45(5): 1564-1572. |
| [5] | LIANG Fuwen, MIAO Long, TIAN Feng, SONG Jiahui, BAI Song, HE Zihao, WANG Ningfei. Effect of Friction on Deployment Dynamics of Non-conductive Space Tether [J]. Acta Armamentarii, 2024, 45(4): 1158-1167. |
| [6] | WANG Yiming, WANG Hengdi, CUI Yongcun, LI Chang, DENG Sier. Thermal Characteristics of Large Span Double Row Tapered Roller Bearing [J]. Acta Armamentarii, 2024, 45(4): 1285-1296. |
| [7] | WANG Erlie, WANG Shuai, PI Dawei, WANG Hongliang, WANG Xianhui, XIE Boyuan. Energy Consumption Modeling for a Heavy-duty Purely Electric-powered Vehicle [J]. Acta Armamentarii, 2024, 45(4): 1229-1236. |
| [8] | WANG Yuchen, WANG Wei, LI Ning, ZHU Zejun, SHI Zhongjiao. A Control Method for Roll Stabilization of Guided Missile with Large Angle of Attack [J]. Acta Armamentarii, 2024, 45(3): 774-788. |
| [9] | YAO Jiazhi, SONG Yansong, SONG Jianlin, WANG Wei, AN Yan. Research on Tracking Strategy of Roll-pitch Seeker [J]. Acta Armamentarii, 2024, 45(11): 4031-4038. |
| [10] | CAI Yunlong, YANG Lina, QUAN Liang, YANG Baosheng, REN Ruoyu. Design and Optimization of Locust-hindfoot-inspired Embedded Missile Ejection Device [J]. Acta Armamentarii, 2024, 45(11): 3983-3997. |
| [11] | WANG Jilong, WEN Yaoke, LIU Dongxu, WANG Huicheng, SHEN Zhouyu, LUO Xiaohao. Mechanical Response of Body Armor during Rifle Bullet Penetration Based on Bond-based Peridynamic Method [J]. Acta Armamentarii, 2024, 45(11): 4094-4105. |
| [12] | LIU Taisu, YIN Qiang, LI Yong, ZHANG Yuntian. Rigid-flexible Coupling Dynamic Modeling and Characteristics Analysis of a Rotational Chain Magazine [J]. Acta Armamentarii, 2024, 45(11): 4133-4144. |
| [13] | XIAO Wangang, ZHOU Yunbo, FU Yaoyu, ZHANG Ming, ZHOU Jun, GE Jitao. Analysis of the Influence of Soil on the Maneuverability of Military Off-road Vehicles [J]. Acta Armamentarii, 2024, 45(1): 288-298. |
| [14] | ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster [J]. Acta Armamentarii, 2024, 45(1): 219-230. |
| [15] | LI Dongyang, CHANG Sijiang, WANG Zhongyuan. Nonlinear Region of Attraction Estimation for Projectile’s Angular Motion [J]. Acta Armamentarii, 2023, 44(8): 2329-2341. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||