
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (5): 1384-1401.doi: 10.12382/bgxb.2022.1070
Previous Articles Next Articles
WU Rui, YU Huilong*( ), DONG Haotian, XI Junqiang**()
), DONG Haotian, XI Junqiang**()
Received:2022-11-18
Online:2023-07-03
Contact:
YU Huilong, XI Junqiang
CLC Number:
WU Rui, YU Huilong, DONG Haotian, XI Junqiang. Refined Dynamics Modeling and Simulation of Special Tracked Vehicles[J]. Acta Armamentarii, 2024, 45(5): 1384-1401.
Add to citation manager EndNote|Ris|BibTeX
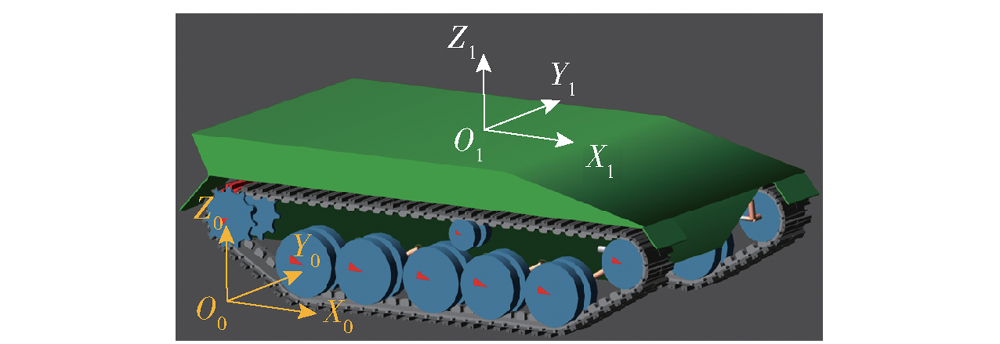
Fig.1 Diagrammatic sketch of tracked vehicle model
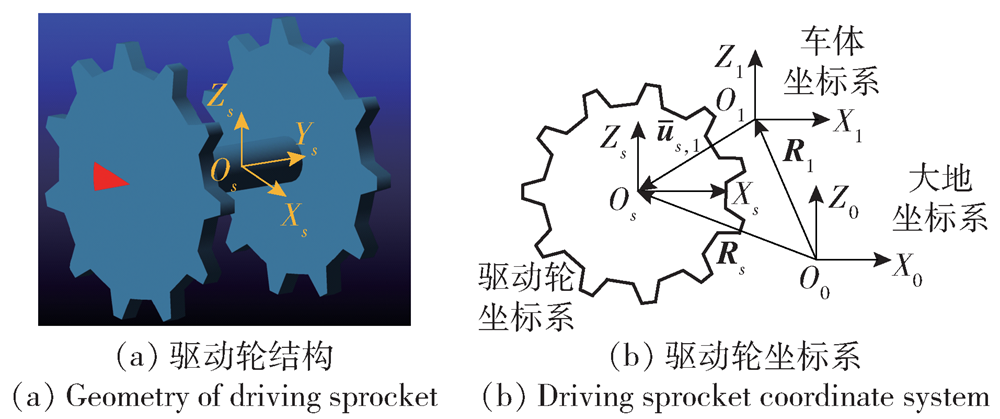
Fig.2 Diagrammatic sketch of driving sprocket
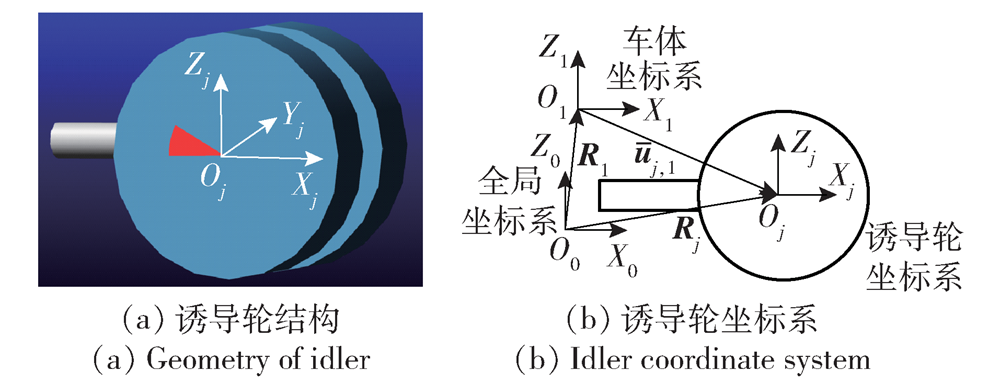
Fig.3 Diagrammatic sketch of idler
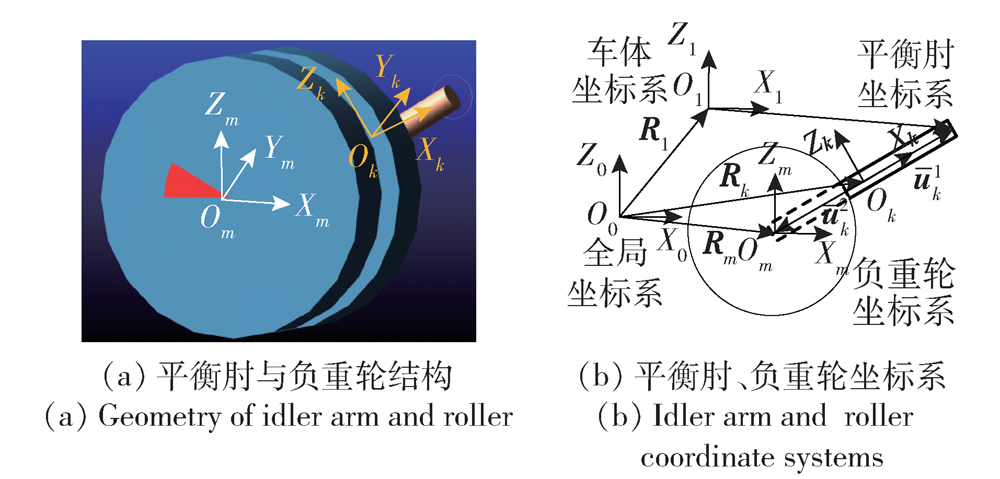
Fig.4 Diagrammatic sketch of idler arm and roller

Fig.5 Diagrammatic sketch of adjacent track links
Fig.6 The contact of track pin and sprocket
Fig.7 The contact of track link and roller

Fig.8 Coefficient of friction

Fig.9 Lateral contact

Fig.10 Diagrammatic sketch of revolute joint between track links

Fig.11 Flowchart of solution
Fig.12 Comparison of longitudinal accelerations
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 5.290×10-1 | 3.521×10-2 |
| 纵向速度/(m·s-1) | 1.249×10-1 | 9.895×10-3 |
| 垂向位移/m | 3.389×10-3 | 2.346×10-4 |
| 垂向速度/(m·s-1) | 4.547×10-2 | 1.582×10-3 |
| 俯仰角/rad | 7.124×10-3 | 5.162×10-4 |
| 俯仰角速度/(rad·s-1) | 2.672×10-2 | 9.156×10-4 |
Table 1 Longitudinal acceleration error
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 5.290×10-1 | 3.521×10-2 |
| 纵向速度/(m·s-1) | 1.249×10-1 | 9.895×10-3 |
| 垂向位移/m | 3.389×10-3 | 2.346×10-4 |
| 垂向速度/(m·s-1) | 4.547×10-2 | 1.582×10-3 |
| 俯仰角/rad | 7.124×10-3 | 5.162×10-4 |
| 俯仰角速度/(rad·s-1) | 2.672×10-2 | 9.156×10-4 |
Fig.13 Comparison of longitudinal decelerations
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 1.554×10-1 | 1.471×10-2 |
| 纵向速度/(m·s-1) | 1.083×10-1 | 5.511×10-3 |
| 垂向位移/m | 5.163×10-3 | 2.680×10-4 |
| 垂向速度/(m·s-1) | 4.274×10-2 | 1.124×10-3 |
| 俯仰角/rad | 5.738×10-3 | 4.401×10-4 |
| 俯仰角速度/(rad·s-1) | 1.754×10-2 | 7.596×10-4 |
Table 2 Longitudinal deceleration error
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 1.554×10-1 | 1.471×10-2 |
| 纵向速度/(m·s-1) | 1.083×10-1 | 5.511×10-3 |
| 垂向位移/m | 5.163×10-3 | 2.680×10-4 |
| 垂向速度/(m·s-1) | 4.274×10-2 | 1.124×10-3 |
| 俯仰角/rad | 5.738×10-3 | 4.401×10-4 |
| 俯仰角速度/(rad·s-1) | 1.754×10-2 | 7.596×10-4 |
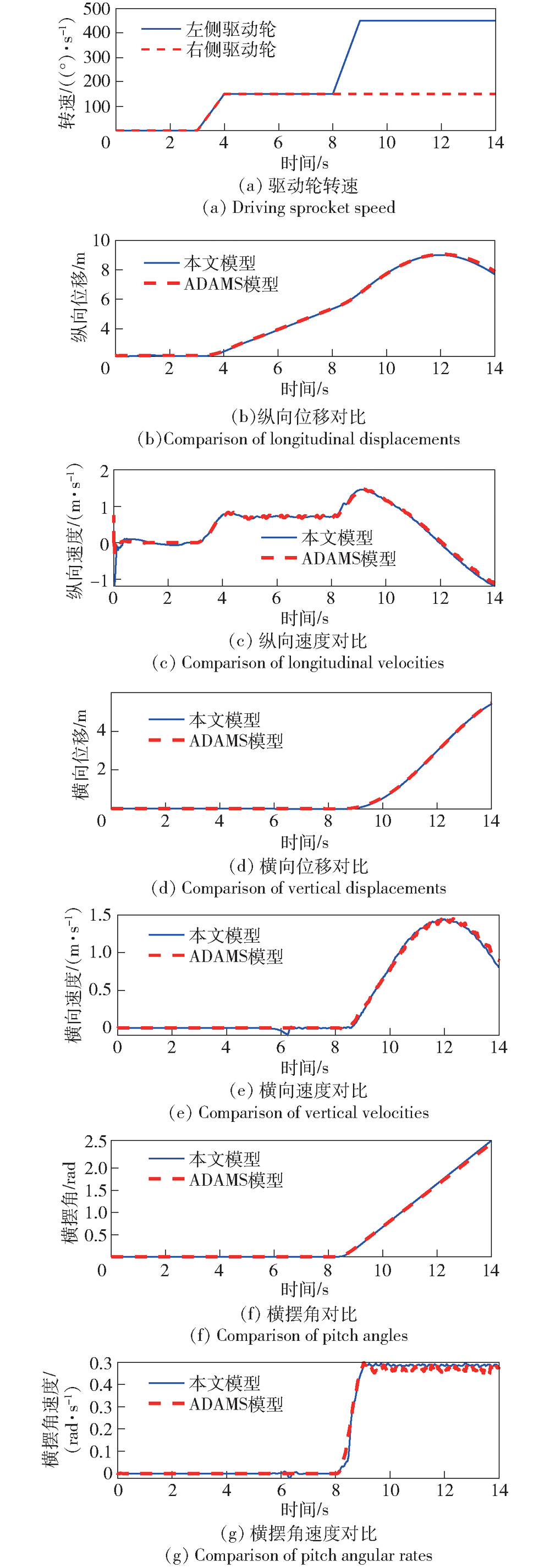
Fig.14 Comparison of steering working conditions
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 2.119×10-1 | 9.132×10-3 |
| 纵向速度/(m·s-1) | 1.614×10-1 | 6.746×10-3 |
| 横向位移/m | 5.422×10-2 | 3.147×10-3 |
| 横向速度/(m·s-1) | 1.085×10-1 | 4.212×10-3 |
| 横摆角/rad | 6.198×10-2 | 2.893×10-3 |
| 横摆角速度/(rad·s-1) | 1.000×10-1 | 2.329×10-3 |
Table 3 Steering error
| 参数 | 最大误差绝对值 | 误差均方根 |
|---|---|---|
| 纵向位移/m | 2.119×10-1 | 9.132×10-3 |
| 纵向速度/(m·s-1) | 1.614×10-1 | 6.746×10-3 |
| 横向位移/m | 5.422×10-2 | 3.147×10-3 |
| 横向速度/(m·s-1) | 1.085×10-1 | 4.212×10-3 |
| 横摆角/rad | 6.198×10-2 | 2.893×10-3 |
| 横摆角速度/(rad·s-1) | 1.000×10-1 | 2.329×10-3 |
| [1] |
邹渊, 张彬, 张旭东, 等. 基于归一化优势函数的强化学习混合动力履带车辆能量管理[J]. 兵工学报, 2021, 42(10): 2159-2169.
|
|
doi: 10.3969/j.issn.1000-1093.2021.10.011 |
|
| [2] |
胡家铭, 胡宇辉, 陈慧岩, 等. 基于模型预测控制的无人驾驶履带车辆轨迹跟踪方法研究[J]. 兵工学报, 2019, 40(3): 456-463.
doi: 10.3969/j.issn.1000-1093.2019.03.002 |
|
doi: 10.3969/j.issn.1000-1093.2019.03.002 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
王克运, 张相洪, 史力晨, 等. 履带车辆越障过程的动力学仿真[J]. 兵工学报, 2005, 26(5):577-583.
|
|
|
|
| [7] |
马星国, 李方贵, 尤小梅. 履带车辆悬挂系统当量化及车辆平面数学模型建立[J]. 机械工程学报, 2015, 51(18):143-150.
doi: 10.3901/JME.2015.18.143 |
|
|
|
| [8] |
李春明, 吴维, 郭智蔷, 等. 履带车辆纵向与垂向耦合动力学模型及功率特性[J]. 兵工学报, 2021, 42(3):449-458.
doi: 10.3969/j.issn.1000-1093.2021.03.001 |
|
doi: 10.3969/j.issn.1000-1093.2021.03.001 |
|
| [9] |
|
| [10] |
刘妤, 谢铌, 张拓, 等. 履带车辆软坡地面力学建模及行驶性能分析[J]. 机械设计, 2021, 38(3):110-118.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
蒲明辉, 吴江. 基于ADAMS的链传动多体动力学模型研究[J]. 机械设计与研究, 2008, 24(2):57-59
|
|
|
|
| [21] |
|
| [22] |
刘延柱, 潘振宽, 戈新生. 多体系统动力学[M]. 第2版. 北京: 高等教育出版社, 2014.
|
|
|
| [1] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [2] | YUAN Yi, GAI Jiangtao, ZENG Gen, ZHOU Guangming, LI Xunming, MA Changjun. Analysis and Experimental Verification of Yaw Motion Response Characteristics of High-speed Tracked Vehicle [J]. Acta Armamentarii, 2024, 45(4): 1094-1107. |
| [3] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [4] | WANG Xu, LI Rui, HUANG Ying, SHEN Jiwei, SHANG Xianhe. Construction of Driving Cycle for Military Tracked Vehicles Considering Road Features [J]. Acta Armamentarii, 2024, 45(3): 907-915. |
| [5] | XIAO Wangang, ZHOU Yunbo, FU Yaoyu, ZHANG Ming, ZHOU Jun, GE Jitao. Analysis of the Influence of Soil on the Maneuverability of Military Off-road Vehicles [J]. Acta Armamentarii, 2024, 45(1): 288-298. |
| [6] | DU Wanshan, ZHOU Zhou, BAI Yu, ZHANG Zhilin, WANG Keilei. Study on Multibody Dynamics Modeling and Flight Dynamic Characteristics of Combined Aircraft [J]. Acta Armamentarii, 2023, 44(8): 2245-2262. |
| [7] | LIU Jia, LIU Hai’ou, CHEN Huiyan, MAO Feihong. Road Types Identification Method of Unmanned Tracked Vehicles Based on Fusion Features [J]. Acta Armamentarii, 2023, 44(5): 1267-1276. |
| [8] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [9] | SHENG Hui, XIANG Changle, GAI Jiangtao, YUAN Yi, JIAN Hongchao, ZHANG Nan. Vehicle Safety Control of Tracked Vehicle Driven by Two-sided Motor Coupling under the Failure Mode of One-sided Motor [J]. Acta Armamentarii, 2023, 44(11): 3498-3507. |
| [10] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [11] | ZHANG Faping, ZHANG Shuchang, WU Kai, ZHANG Yunhe, YAN Yan. Dynamics Parameter Optimization for Tracked Vehicle Based on Surrogate Model Evolution [J]. Acta Armamentarii, 2023, 44(1): 27-39. |
| [12] | ZHANG Ruizeng, GONG Jianwei, CHEN Huiyan, LIU Haiou, LU Jiaxing. Turning Model for Tracked Vehicles on Hard Ground: Analysis and Verification [J]. Acta Armamentarii, 2023, 44(1): 233-246. |
| [13] | ZHOU Cheng, LUO Yang, WEI Jiang, CAO Hongrui, LAN Hai, ZHANG Wanhao. Extraction Method of Instantaneous Frequency Feature of Torsional Vibration Signals of Tracked Vehicle Brake [J]. Acta Armamentarii, 2023, 44(1): 316-324. |
| [14] | YUAN Yi, GAI Jiangtao, ZHOU Guangming, GAO Xiucai, LI Xunming, MA Changjun. Analysis of High-Speed Electric Tracked Vehicle’s Handling Characteristics [J]. Acta Armamentarii, 2023, 44(1): 203-213. |
| [15] | SHUAI Zhibin, HE Shuai, LI Guohui, LI Yaoheng, LI Yong, ZHANG Ying, JIAN Hongchao. Modeling and Optimal Control of Low-Temperature Starting Process of Electro-Mechanical Transmission for Special Tracked Vehicles [J]. Acta Armamentarii, 2023, 44(1): 117-128. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||