
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (11): 3983-3997.doi: 10.12382/bgxb.2024.0180
Previous Articles Next Articles
CAI Yunlong, YANG Lina*( ), QUAN Liang, YANG Baosheng, REN Ruoyu
), QUAN Liang, YANG Baosheng, REN Ruoyu
Received:2024-03-12
Online:2024-11-26
Contact:
YANG Lina
CLC Number:
CAI Yunlong, YANG Lina, QUAN Liang, YANG Baosheng, REN Ruoyu. Design and Optimization of Locust-hindfoot-inspired Embedded Missile Ejection Device[J]. Acta Armamentarii, 2024, 45(11): 3983-3997.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Different types of embedded missile ejection devices

Fig.2 Tripod biological structure of locust
Fig.3 Locust-inspired jumping robots

Fig.4 High-speed photographs of locust jumping
Fig.5 Parameterized model of ejection mechanism
Fig.6 Deployment process of ejection mechanism
Fig.7 The velocity relationship diagram of two ends of connecting rod

Fig.8 Force diagram of connecting rod
| 点 | 坐标/m | 点 | 坐标/m |
|---|---|---|---|
| A | (0.000, 0.000) | E | (0.512, -0.050) |
| B | (-0.250, -0.050) | F | (0.762, -0.100) |
| C | (0.000, -0.100) | G | (0.262, 0.000) |
| D | (0.762, 0.000) |
Table 1 The initial coordinates of design points
| 点 | 坐标/m | 点 | 坐标/m |
|---|---|---|---|
| A | (0.000, 0.000) | E | (0.512, -0.050) |
| B | (-0.250, -0.050) | F | (0.762, -0.100) |
| C | (0.000, -0.100) | G | (0.262, 0.000) |
| D | (0.762, 0.000) |
| 参数 | 数值 |
|---|---|
| 导弹质量/kg | 160 |
| x轴方向转动惯量/(kg·m2) | 2.55 |
| y轴方向转动惯量/(kg·m2) | 250 |
| z轴方向转动惯量/(kg·m2) | 250 |
| 导弹质心与C点距离的x轴方向分量/m | 0.50 |
| 导弹质心与C点距离的y轴方向分量/m | 0.15 |
Table 2 Missile parameters
| 参数 | 数值 |
|---|---|
| 导弹质量/kg | 160 |
| x轴方向转动惯量/(kg·m2) | 2.55 |
| y轴方向转动惯量/(kg·m2) | 250 |
| z轴方向转动惯量/(kg·m2) | 250 |
| 导弹质心与C点距离的x轴方向分量/m | 0.50 |
| 导弹质心与C点距离的y轴方向分量/m | 0.15 |
Fig.9 Ejection separation parameter curves

Fig.10 Block diagram of surrogate optimization algorithm based on Kriging model[19]
| 设计变量 | 范围/m | |
|---|---|---|
| A点纵坐标yA | [-0.020,0.000] | |
| B点横坐标xB | [-0.300,-0.200] | |
| B点纵坐标yB | [-0.060,-0.040] | |
| D点纵坐标yD | [-0.030,0.000] | |
| E点横坐标xE | [0.400,0.562] | |
| 扭簧1刚度系数k1 | [0.100,50.000] | |
| 扭簧2刚度系数k2 | [0.100,50.000] | |
| 弹射力系数β | [0.200,1.000] | |
Table 3 Definition of design variables
| 设计变量 | 范围/m | |
|---|---|---|
| A点纵坐标yA | [-0.020,0.000] | |
| B点横坐标xB | [-0.300,-0.200] | |
| B点纵坐标yB | [-0.060,-0.040] | |
| D点纵坐标yD | [-0.030,0.000] | |
| E点横坐标xE | [0.400,0.562] | |
| 扭簧1刚度系数k1 | [0.100,50.000] | |
| 扭簧2刚度系数k2 | [0.100,50.000] | |
| 弹射力系数β | [0.200,1.000] | |
Fig.11 β iterative and violation curves
| 设计变量 | 范围/m | 初始值 (左侧)/m | 优化值 (左侧)/m | 初始值 (右侧)/m | 优化值 (右侧)/m |
|---|---|---|---|---|---|
| A点纵坐标yA/m | [-0.02,0.00] | 0.00 | -0.0132 | 0.00 | 0.0000 |
| B点横坐标xB/m | [-0.30,-0.20] | -0.25 | -0.2576 | -0.25 | -0.2674 |
| B点纵坐标yB/m | [-0.06,-0.04] | -0.05 | -0.0582 | -0.05 | -0.0508 |
| D点纵坐标yD/m | [-0.03,0.00] | 0.00 | 0.0000 | 0.00 | -0.0118 |
| E点横坐标xE/m | [0.40,0.562] | 0.512 | 0.5120 | 0.512 | 0.4843 |
| 扭簧1刚度系数k1/(N·m·rad-1) | [0.10,50.00] | 0.10 | 50.0000 | 0.10 | 42.6693 |
| 扭簧2刚度系数k2/(N·m·rad-1) | [0.10,50.00] | 0.10 | 47.6087 | 0.10 | 34.2355 |
| 弹射力系数β | [0.20,1.00] | 1.00 | 0.6271 | 1.00 | 0.6731 |
Table 4 Comparison of design variables
| 设计变量 | 范围/m | 初始值 (左侧)/m | 优化值 (左侧)/m | 初始值 (右侧)/m | 优化值 (右侧)/m |
|---|---|---|---|---|---|
| A点纵坐标yA/m | [-0.02,0.00] | 0.00 | -0.0132 | 0.00 | 0.0000 |
| B点横坐标xB/m | [-0.30,-0.20] | -0.25 | -0.2576 | -0.25 | -0.2674 |
| B点纵坐标yB/m | [-0.06,-0.04] | -0.05 | -0.0582 | -0.05 | -0.0508 |
| D点纵坐标yD/m | [-0.03,0.00] | 0.00 | 0.0000 | 0.00 | -0.0118 |
| E点横坐标xE/m | [0.40,0.562] | 0.512 | 0.5120 | 0.512 | 0.4843 |
| 扭簧1刚度系数k1/(N·m·rad-1) | [0.10,50.00] | 0.10 | 50.0000 | 0.10 | 42.6693 |
| 扭簧2刚度系数k2/(N·m·rad-1) | [0.10,50.00] | 0.10 | 47.6087 | 0.10 | 34.2355 |
| 弹射力系数β | [0.20,1.00] | 1.00 | 0.6271 | 1.00 | 0.6731 |
| 目标和约束 | 项目 | 范围 | 初始值 | 优化值 |
|---|---|---|---|---|
| 目标 | 最小弹射力FT /N | η·1·p0·S·(1/(1+1.962x))1.4 | η·0.6271·p0·S·(1/(1+1.962x))1.4 | |
| 分离速度vy /(m·s-1) | ≤-7.9 | -8.0290 | ||
| 约束 | 俯仰角速度ωz/((°)·s-1) | [15,40] | 34.8096 | |
| 俯仰角度θz/(°) | ≥1.5 | 1.5984 |
Table 5 Design objectives and constraints of missile head on the left side
| 目标和约束 | 项目 | 范围 | 初始值 | 优化值 |
|---|---|---|---|---|
| 目标 | 最小弹射力FT /N | η·1·p0·S·(1/(1+1.962x))1.4 | η·0.6271·p0·S·(1/(1+1.962x))1.4 | |
| 分离速度vy /(m·s-1) | ≤-7.9 | -8.0290 | ||
| 约束 | 俯仰角速度ωz/((°)·s-1) | [15,40] | 34.8096 | |
| 俯仰角度θz/(°) | ≥1.5 | 1.5984 |
| 目标和约束 | 项目 | 范围 | 初始值 | 优化值 |
|---|---|---|---|---|
| 目标 | 最小弹射力FT/N | η·1·p0·S·(1/(1+1.962x))1.4 | η·0.6271·p0·S·(1/(1+1.962x))1.4 | |
| 分离速度vy/(m·s-1) | -8.0277 | |||
| 约束 | 俯仰角速度为ωz/((°)·s-1) | [-40,-15] | -33.5807 | |
| 俯仰角度θz/(°) | ≤-1.5 | -1.6082 |
Table 6 Design objectives and constraints of missile head on the right side
| 目标和约束 | 项目 | 范围 | 初始值 | 优化值 |
|---|---|---|---|---|
| 目标 | 最小弹射力FT/N | η·1·p0·S·(1/(1+1.962x))1.4 | η·0.6271·p0·S·(1/(1+1.962x))1.4 | |
| 分离速度vy/(m·s-1) | -8.0277 | |||
| 约束 | 俯仰角速度为ωz/((°)·s-1) | [-40,-15] | -33.5807 | |
| 俯仰角度θz/(°) | ≤-1.5 | -1.6082 |

Fig.12 Missile separation parameter curves under different working conditions
Fig.13 Ejection force curves under different operating conditions

Fig.14 Schematic diagram of ejection device structure
| 参数 | 数值 |
|---|---|
| A点横坐标xA/m | 0.000 |
| A点纵坐标yA/m | -0.013 |
| B点横坐标xB/m | -0.258 |
| B点纵坐标yB/m | -0.058 |
| C点横坐标xC/m | 0.000 |
| C点纵坐标yC/m | -0.100 |
| D点横坐标xD/m | 0.762 |
| D点纵坐标yD/m | 0.000 |
| E点横坐标xE/m | 0.512 |
| E点纵坐标xE/m | -0.058 |
| F点横坐标xF/m | 0.762 |
| F点纵坐标xF/m | -0.100 |
| G点横坐标xG/m | 0.262 |
| G点纵坐标xG/m | 0.000 |
| 扭簧1刚度系数k1/(N·m·rad-1) | 40.000 |
| 扭簧2刚度系数k2/(N·m·rad-1) | 40.000 |
| 弹射力系数β | 0.6271 |
Table 7 Joint position and torsion spring stiffness parameters of ejection mechanism
| 参数 | 数值 |
|---|---|
| A点横坐标xA/m | 0.000 |
| A点纵坐标yA/m | -0.013 |
| B点横坐标xB/m | -0.258 |
| B点纵坐标yB/m | -0.058 |
| C点横坐标xC/m | 0.000 |
| C点纵坐标yC/m | -0.100 |
| D点横坐标xD/m | 0.762 |
| D点纵坐标yD/m | 0.000 |
| E点横坐标xE/m | 0.512 |
| E点纵坐标xE/m | -0.058 |
| F点横坐标xF/m | 0.762 |
| F点纵坐标xF/m | -0.100 |
| G点横坐标xG/m | 0.262 |
| G点纵坐标xG/m | 0.000 |
| 扭簧1刚度系数k1/(N·m·rad-1) | 40.000 |
| 扭簧2刚度系数k2/(N·m·rad-1) | 40.000 |
| 弹射力系数β | 0.6271 |

Fig.15 Rigid-flexible coupling model
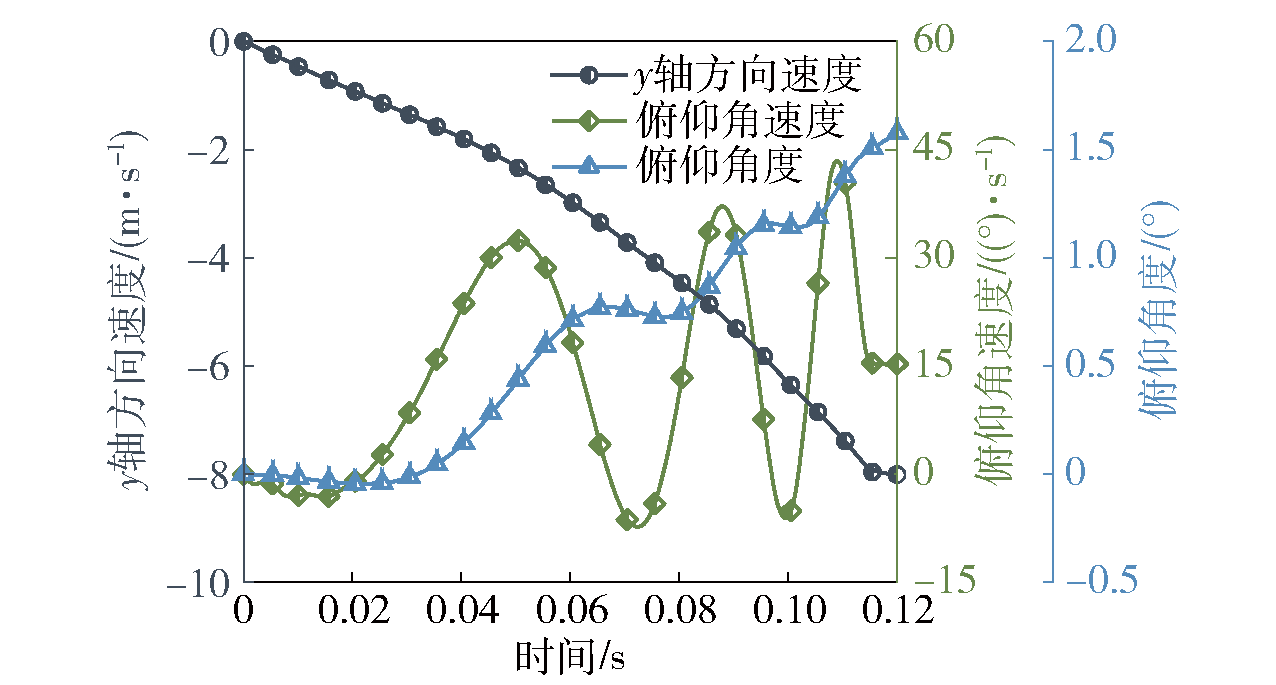
Fig.16 Separation speed, pitch angular velocity, and pitch angle curves
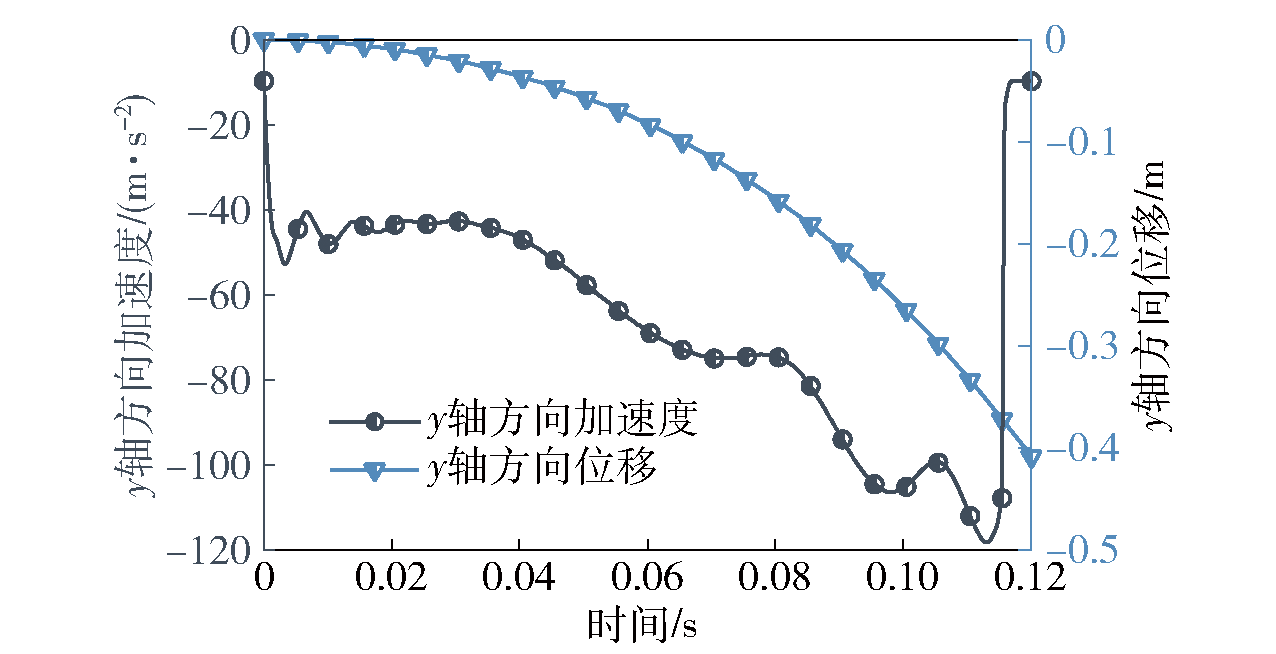
Fig.17 Separating acceleration and displacement curves

Fig.18 Stress cloud map of arm during the ejection process

Fig.19 Shape of missile
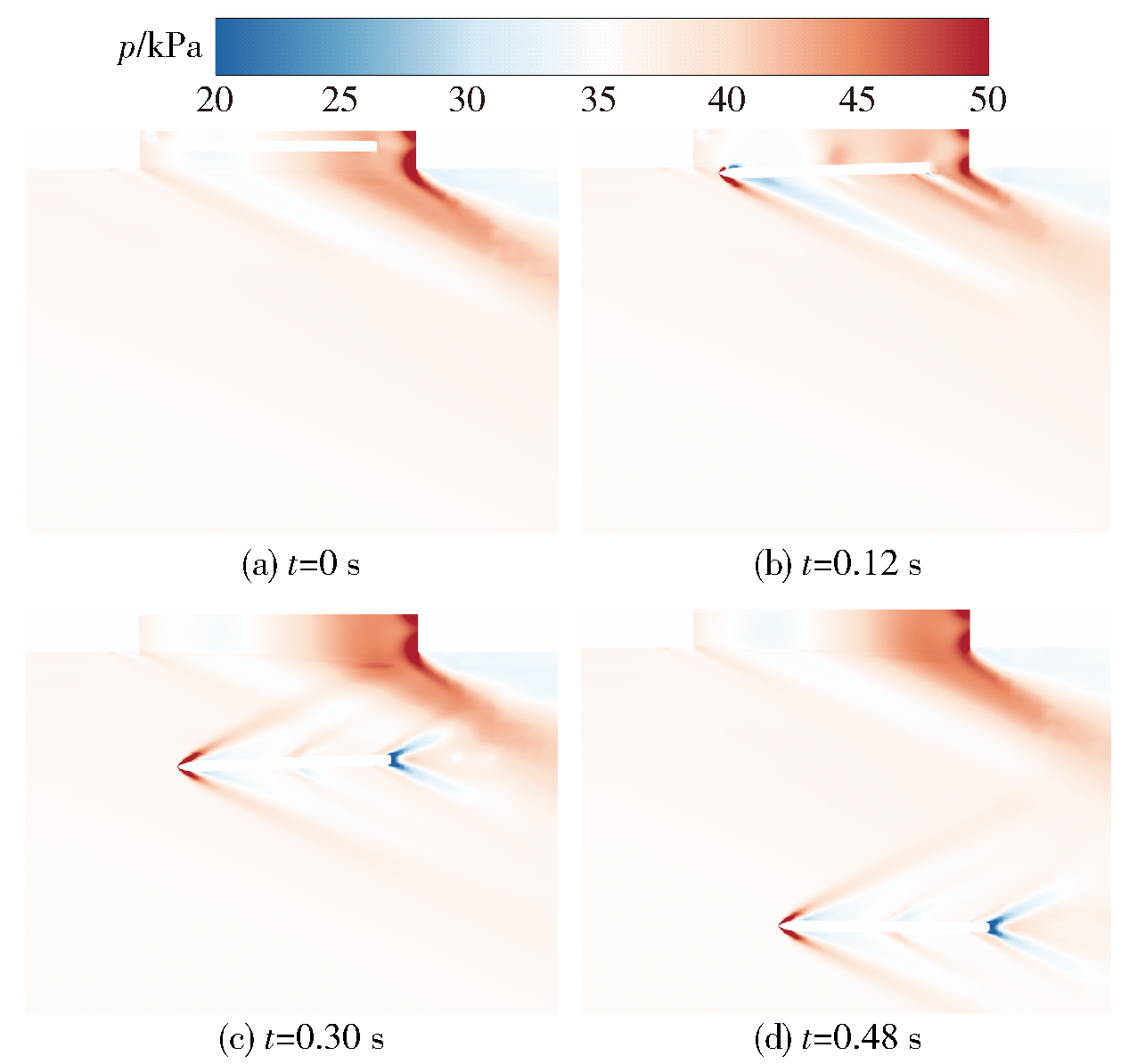
Fig.20 Separation process of missile and fighter
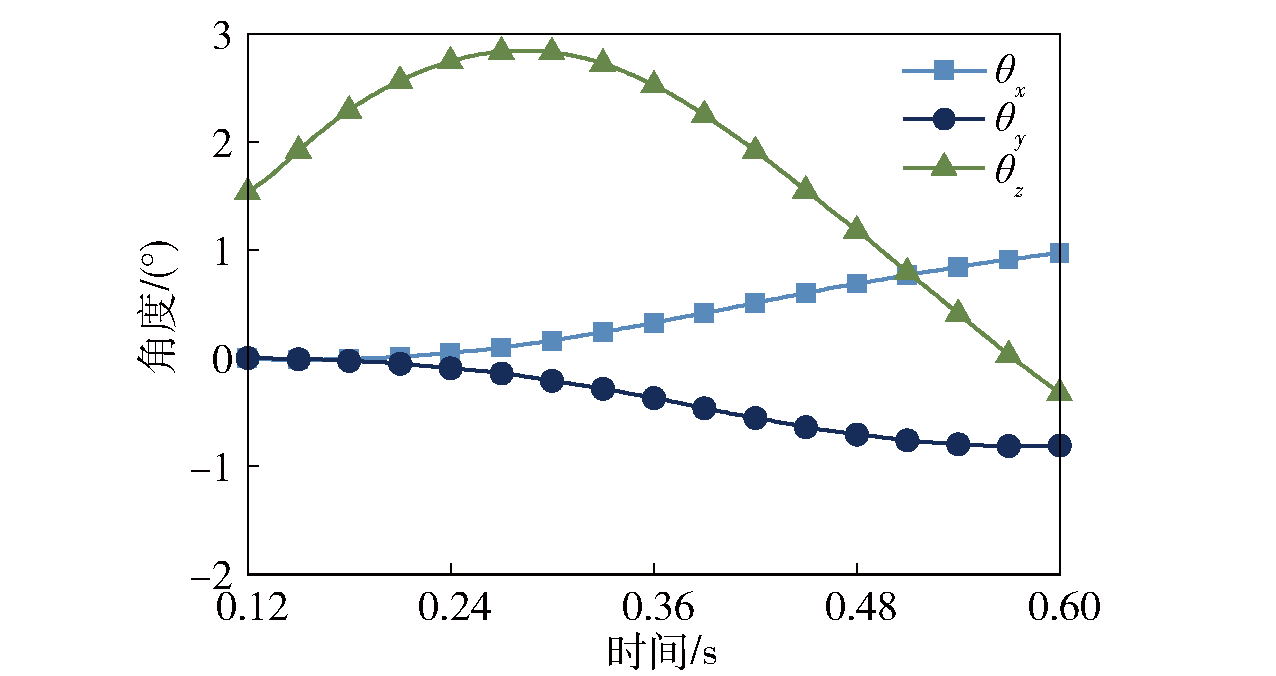
Fig.21 Triaxial angular displacement of missile
Fig.22 Missile triaxial angular velocity
Fig.23 The distances from the head and tail of missile to the belly of fighter
| [1] |
刘浩, 周军, 张士卫. 空空导弹发射技术发展现状及趋势研究[J]. 航空工程进展, 2018, 9(2):147-158.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
可波. 俄罗斯三角旗机械制造设计局成立70周年所展示的SU-57战斗机UVKU-50L[EB/OL]. (2019-11-23) [2024-03-03]. https://k.sina.cn/article_3622879452_pd7f0c0dc02700tros.html.
|
|
|
|
| [5] |
祁武超, 刘恒, 金德玉. 内埋弹舱弹射冲击载荷特性研究[J]. 兵工学报, 2019, 40(4):889-896.
doi: 10.3969/j.issn.1000-1093.2019.04.025 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.025 |
|
| [6] |
|
| [7] |
王清海. 机载内埋武器弹射发射多柔体动力学分析[J]. 航空兵器, 2021, 28(1):66-71.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
曲秀全, 陈照波, 焦映厚. RPR-RPP六杆机构的MATLAB动力学仿真[J]. 机械传动, 2003(6): 13-15, 40-64.
|
|
|
|
| [21] |
曲秀全, 钟诗胜, 戴恒震. RRR-RRR六杆机构的MATLAB动力学求解[J]. 机械设计, 2004(1):56-58.
|
|
|
|
| [22] |
韩忠华. Kriging模型及代理优化算法研究进展[J]. 航空学报, 2016, 37(11):3197-3225.
doi: 10.7527/S1000-6893.2016.0083 |
|
|
|
| [23] |
|
| [1] | ZHANG An, LI Changsheng, ZHANG He, MA Shaojie, YANG Benqiang. Experimental Study on IPM for Buffering and Energy Absorption [J]. Acta Armamentarii, 2024, 45(7): 2260-2269. |
| [2] | LIU Taisu, YIN Qiang, LI Yong, ZHANG Yuntian. Rigid-flexible Coupling Dynamic Modeling and Characteristics Analysis of a Rotational Chain Magazine [J]. Acta Armamentarii, 2024, 45(11): 4133-4144. |
| [3] | MENG Junhui, MA Nuo, HU Rui, JIN Zehua, LI Wenguang, LIU Li. Design and Kinematic Characters of Self-Growing Soft Robots with an Asymmetric Fold Structure [J]. Acta Armamentarii, 2022, 43(12): 3186-3199. |
| [4] | WANG Tao, CAI Jin-yan, MENG Ya-feng, ZHU Sai. Mathematical Description Method for Typical Embryonic Electronic System Structure and Performance [J]. Acta Armamentarii, 2018, 39(7): 1339-1351. |
| [5] | JIANG Xiao-jun, WANG Hua-lin, LING Jun, YIN De-fei. Preparation and Performance Research of Super Absorbent and Temperature Control Green Camouflage Fabric [J]. Acta Armamentarii, 2017, 38(2): 345-350. |
| [6] | RONG Ji-li, XIN Peng-fei, ZHUGE Xun, YANG Yong-tai, XIANG Da-lin. Capturing Dynamics of Flexible Ropes for Space Large-scale End Effector [J]. Acta Armamentarii, 2016, 37(9): 1730-1737. |
| [7] | HU Sheng-hai, GUO Chun-yang, YU Wei, QI Song, SUN Jun-chao. Rigid-flexible Coupling Dynamic Modeling and Error Analysis of Loading Mechanism of Naval Gun Based on MetamorphicPrinciple [J]. Acta Armamentarii, 2015, 36(8): 1398-1404. |
| [8] | HUA Hong-liang, LIAO Zhen-qiang, SONG Jie, QIU Ming, XIAO Jun-bo. The Application of Reverse Jet Gas Technology in Improving Firing Accuracy of a Machine Gun System [J]. Acta Armamentarii, 2015, 36(12): 2241-2246. |
| [9] | HU Kai-ming, WEN Li-hua, YAN Zhao-qi. Static and Dynamic Simulation and Analysis on PBP Actuator with a Connecting rod Mechanism to MagnifyOutput Angular Displacement [J]. Acta Armamentarii, 2014, 35(8): 1258-1266. |
| [10] | GU Yun-qing, ZHAO Gang, ZHAO Hua-lin, ZHENG Jin-xing, WANG Fei, XIAO Lei, LIU Wen-bo. Simulation Study on Drag Reduction Characteristics of Bionic Jet Flow Based on Shark Gill [J]. Acta Armamentarii, 2012, 33(10): 1230-1236. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||