
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (11): 3949-3958.doi: 10.12382/bgxb.2023.1158
Previous Articles Next Articles
WEI Qiaoling1, DU Yuxin1, ZHOU Chao2, WANG Fang1,*( )
)
Received:2023-12-04
Online:2024-04-23
Contact:
WANG Fang
CLC Number:
WEI Qiaoling, DU Yuxin, ZHOU Chao, WANG Fang. Non-singular Sliding Mode Control of Non-minimum Phase Hypersonic Vehicles[J]. Acta Armamentarii, 2024, 45(11): 3949-3958.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Velocity and velocity tracking error
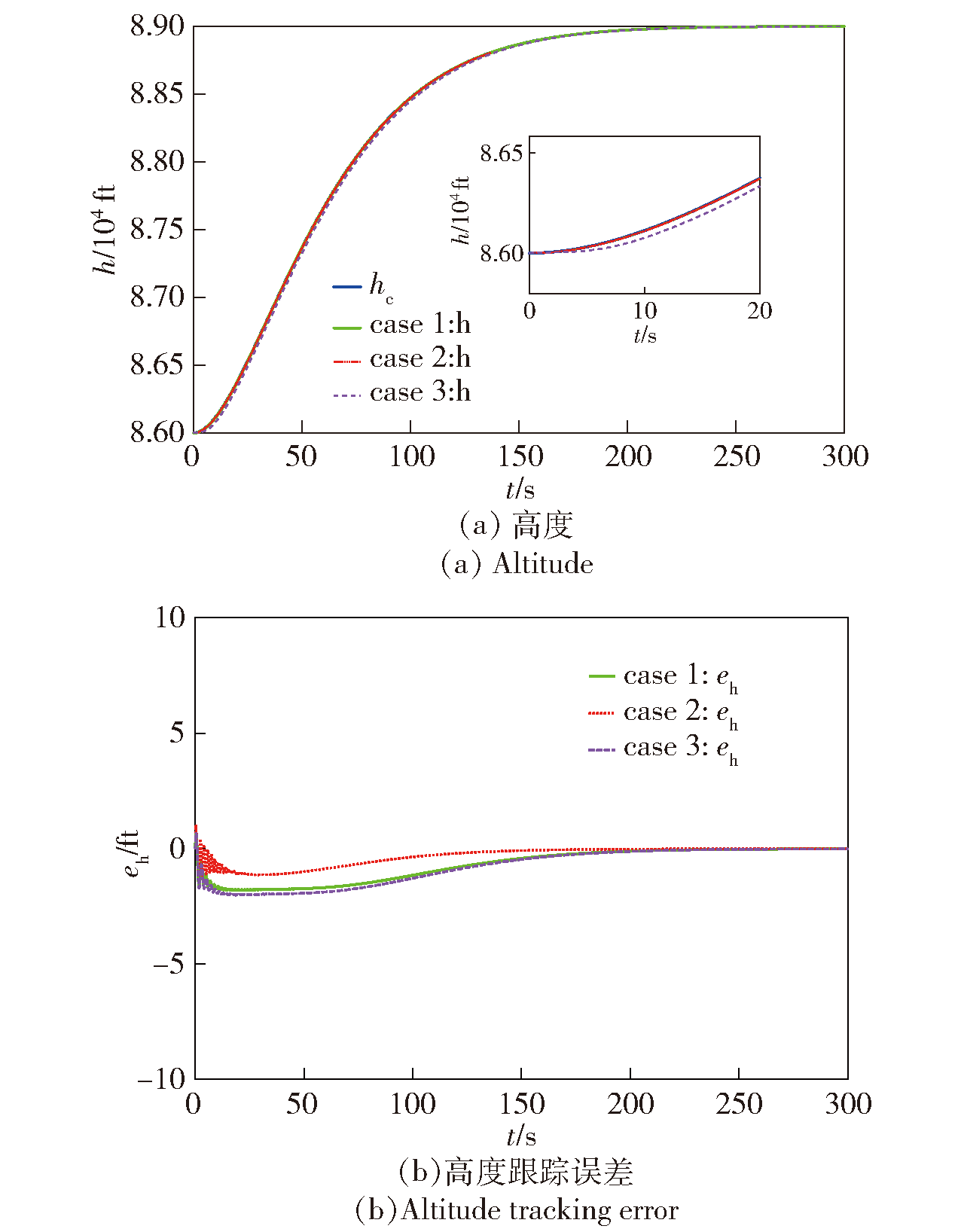
Fig.2 Altitude and altitude tracking error
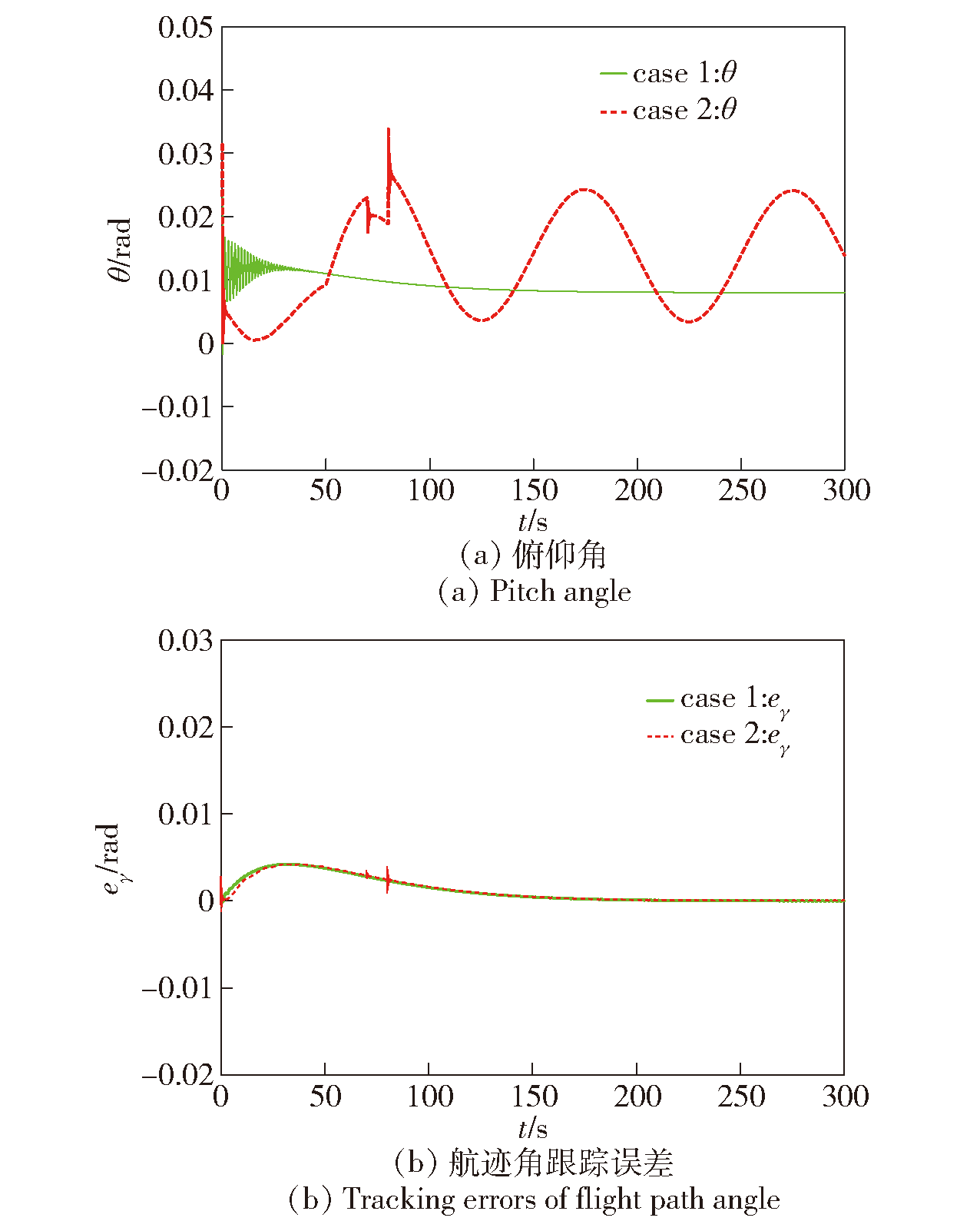
Fig.3 Tracking errors of pitch angle and flight path angle
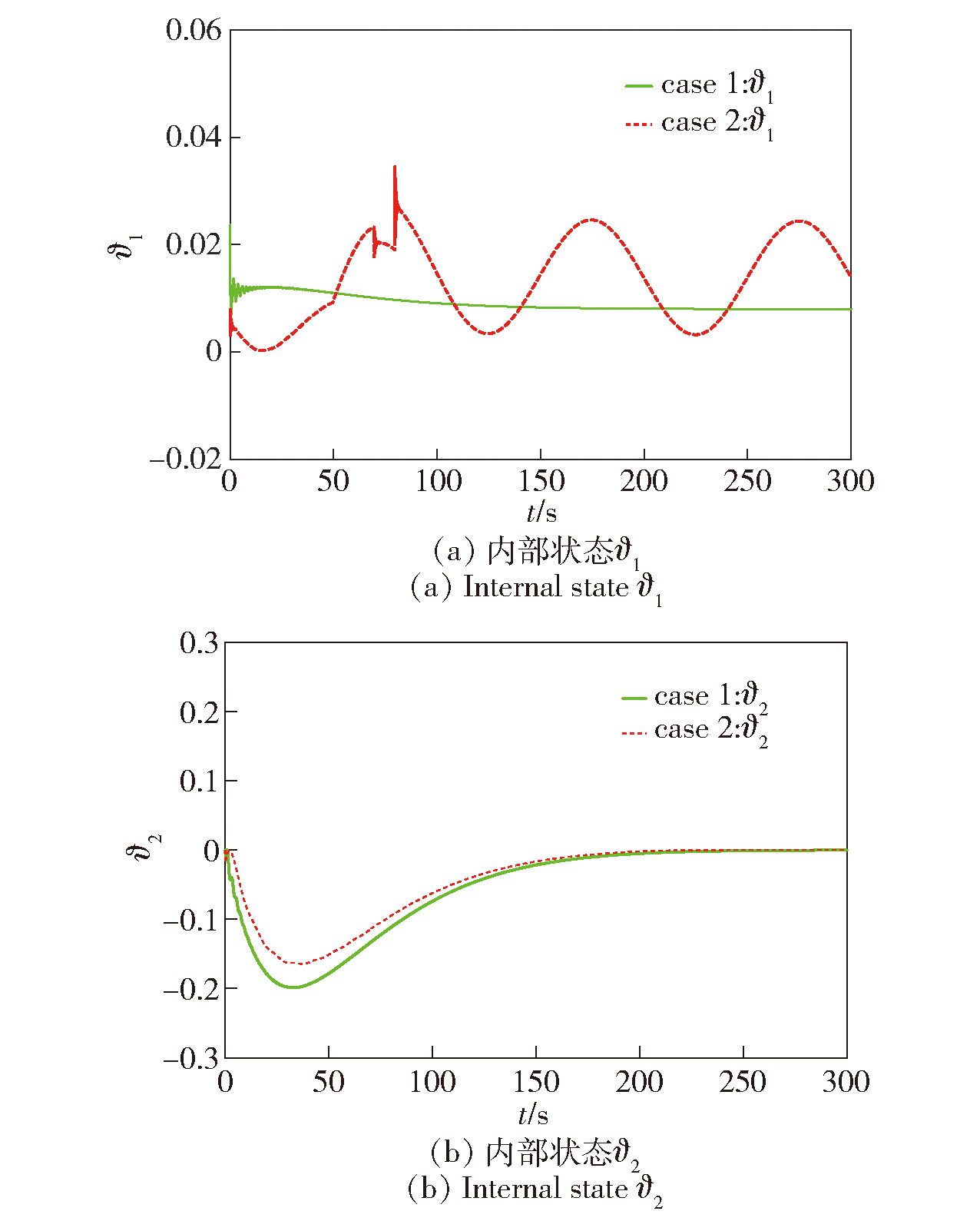
Fig.4 Internal state
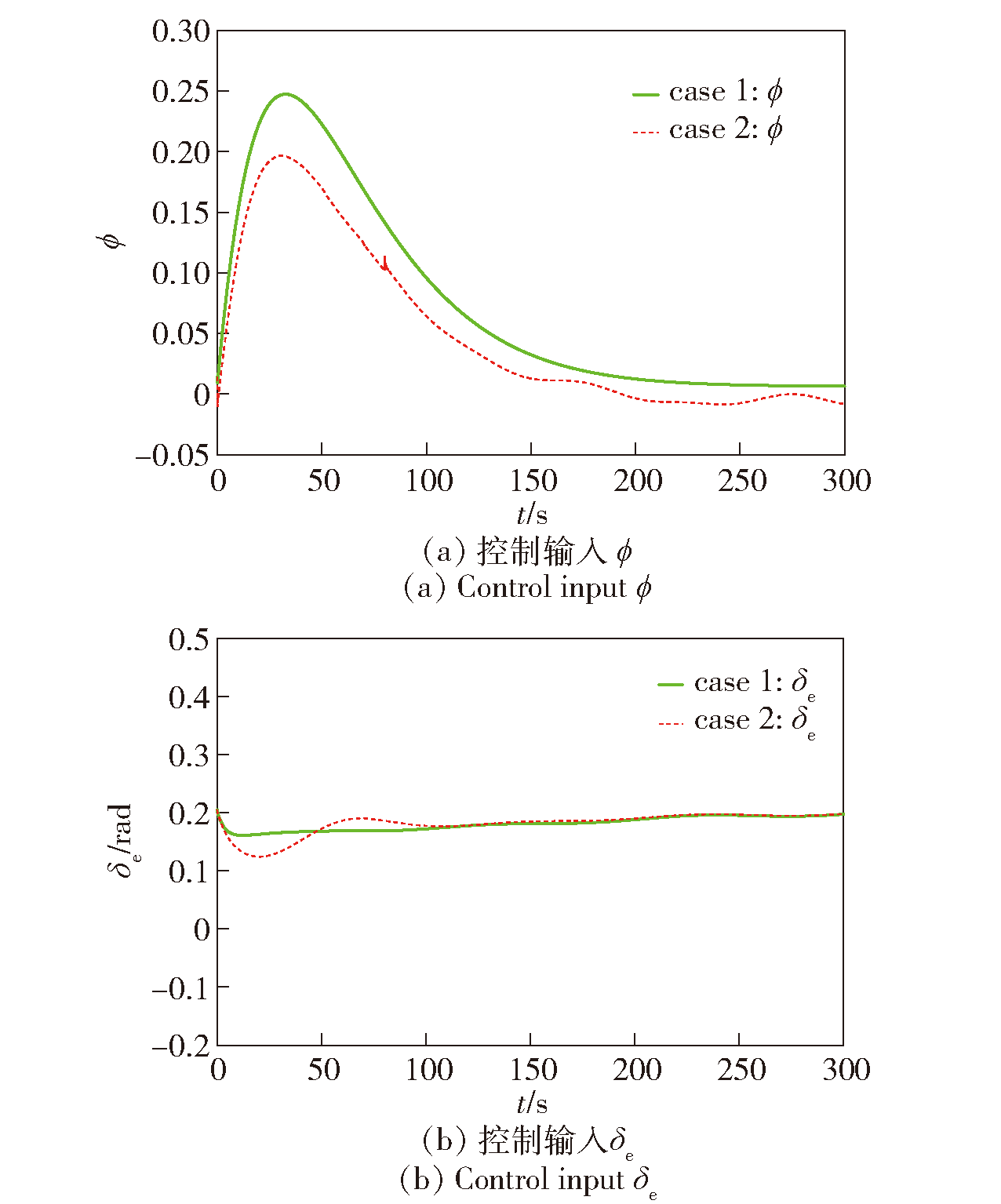
Fig.5 Control input
| [1] |
|
| [2] |
丁一波, 岳晓奎, 代洪华, 等. 考虑进气约束的高超声速飞行器预定性能控制[J]. 航空学报, 2021, 42(11):524838.
doi: 10.7527/S1000-6893.2020.24838 |
|
doi: 10.7527/S1000-6893.2020.24838 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
魏启钊, 齐瑞云, 姜斌. 非最小相位高超声速飞行器自适应鲁棒容错控制[J]. 西北工业大学学报, 2021, 39(10):1-9.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
唐建, 齐瑞云, 姜斌. 考虑约束的高超声速飞行器制导与控制一体化设计[J]. 宇航学报, 2022, 43(5):649-664.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
王成, 王旭刚. 基于滑模干扰观测器的高超声速飞行控制器设计[J]. 电光与控制, 2020, 27(6):90-94.
|
|
|
|
| [25] |
徐长吉, 郭杰. 考虑执行故障的高超声速飞行器有限时间控制设计[J]. 空天技术, 2023, 456(6):76-87.
|
|
|
|
| [26] |
李慧洁, 蔡远利. 基于双幂次趋近律的滑模控制方法[J]. 控制与决策, 2016, 31(3):498-502.
|
|
|
|
| [27] |
|
| [28] |
|
| [29] |
|
| [1] | HU Yanyang, HE Fan, BAI Chengchao. Cooperative Obstacle Avoidance Decision Method for the Terminal Guidance Phase of Hypersonic Vehicles [J]. Acta Armamentarii, 2024, 45(9): 3147-3160. |
| [2] | WANG Xiaofang, XU Jiaqi. Prescribed Performance-based Lateral Channel Control Method of Underactuated Hypersonic Vehicle [J]. Acta Armamentarii, 2024, 45(8): 2749-2760. |
| [3] | WANG Yong’an, LI Dongguang, WU Hao, LIU Yang. An Adaptive Filtering-disturbance Observer-based State Estimation Algorithm for Large Ships [J]. Acta Armamentarii, 2024, 45(7): 2318-2328. |
| [4] | CHEN Dong, QIAN Linfang, CHEN Zhiqun, CHEN Longmiao, ZOU Quan, CHEN Junhua. An Improved Quasi-continuous Algorithm for Rotational Shell Magazine Position Control [J]. Acta Armamentarii, 2024, 45(5): 1436-1448. |
| [5] | WANG Wei, YANG Jing, NAN Yuxiang, LI Junhui, WANG Yuchen. Design of a Neural Network Acceleration Autopilot for Spinning Projectile Based on Adaptive Disturbance Observer [J]. Acta Armamentarii, 2024, 45(11): 3841-3855. |
| [6] | GAO Tiesuo, JIANG Tao, FU Yang’aoxiao, DING Mingsong, LIU Qingzong, DONG Weizhong, XU Yong, LI Peng. Plasma Distribution and Its Effect on Electromagnetic Wave Transmission across Vehicles of Varying Sizes [J]. Acta Armamentarii, 2023, 44(6): 1809-1819. |
| [7] | MA Yuemeng, WANG Linwei, SHAO Chuntao, ZHOU Di, WANG Yonghai. Active-Disturbance-Rejection/Robust Attitude Control System Design of Underactuated Vehicle Based on Flap Control [J]. Acta Armamentarii, 2023, 44(5): 1251-1266. |
| [8] | DONG Jinlu, MA Yuemeng, ZHOU Di, GONG Xiaogang, ZHANG Xi, SONG Jiahong. A Composite Sliding Mode Control Scheme Based on Reaction Jets and Flaps for Near-Space Hypersonic Vehicles [J]. Acta Armamentarii, 2023, 44(2): 496-506. |
| [9] | WANG Chen, TIAN Zhenguo, SHEN Zhenxing. Fluid-Structure Interaction Mechanism of Hypersonic Aircraft in Plasma Environment [J]. Acta Armamentarii, 2023, 44(10): 3038-3046. |
| [10] | CHEN Chen, MA Guang-fu, SUN Yan-chao, LI Chuan-jiang. Recursive Sliding Mode Control for Hypersonic Vehicle Based on Nonlinear Disturbance Observer [J]. Acta Armamentarii, 2016, 37(5): 840-850. |
| [11] | ZHAO Jiang,ZHOU Rui. Landing Footprint Computation Based on Particle Swarm Optimization [J]. Acta Armamentarii, 2015, 36(9): 1680-1687. |
| [12] | ZHAO Jiang, ZHOU Rui. Predictor-corrector Reentry Guidance Based on Feedback Bank Angle Control [J]. Acta Armamentarii, 2015, 36(5): 823-830. |
| [13] | LIU Jun-hui, SHAN Jia-yuan, ZHAO Xin. Disturbance Torque Compensation of Gyro-stabilized Seeker Based on Disturbance Observer [J]. Acta Armamentarii, 2014, 35(6): 842-849. |
| [14] | RAN Mao-peng, WANG Qing, MO Hua-dong, DONG Chao-yang. ANFIS-based Predictive Reentry Guidance for Hypersonic Vehicles [J]. Acta Armamentarii, 2014, 35(12): 2016-2022. |
| [15] | XU Jiao, WANG Jiang, SONG Tao, HU Kuan-rong. A Disturbance Observer-based Inhibition Method for Disturbance Rejection Rate of Seeker [J]. Acta Armamentarii, 2014, 35(11): 1790-1798. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||