
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (11): 4031-4038.doi: 10.12382/bgxb.2023.0977
Previous Articles Next Articles
YAO Jiazhi1,2, SONG Yansong1,2,*( ), SONG Jianlin3, WANG Wei1,2, AN Yan1,2
), SONG Jianlin3, WANG Wei1,2, AN Yan1,2
Received:2023-09-27
Online:2023-12-01
Contact:
SONG Yansong
CLC Number:
YAO Jiazhi, SONG Yansong, SONG Jianlin, WANG Wei, AN Yan. Research on Tracking Strategy of Roll-pitch Seeker[J]. Acta Armamentarii, 2024, 45(11): 4031-4038.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 System block diagram
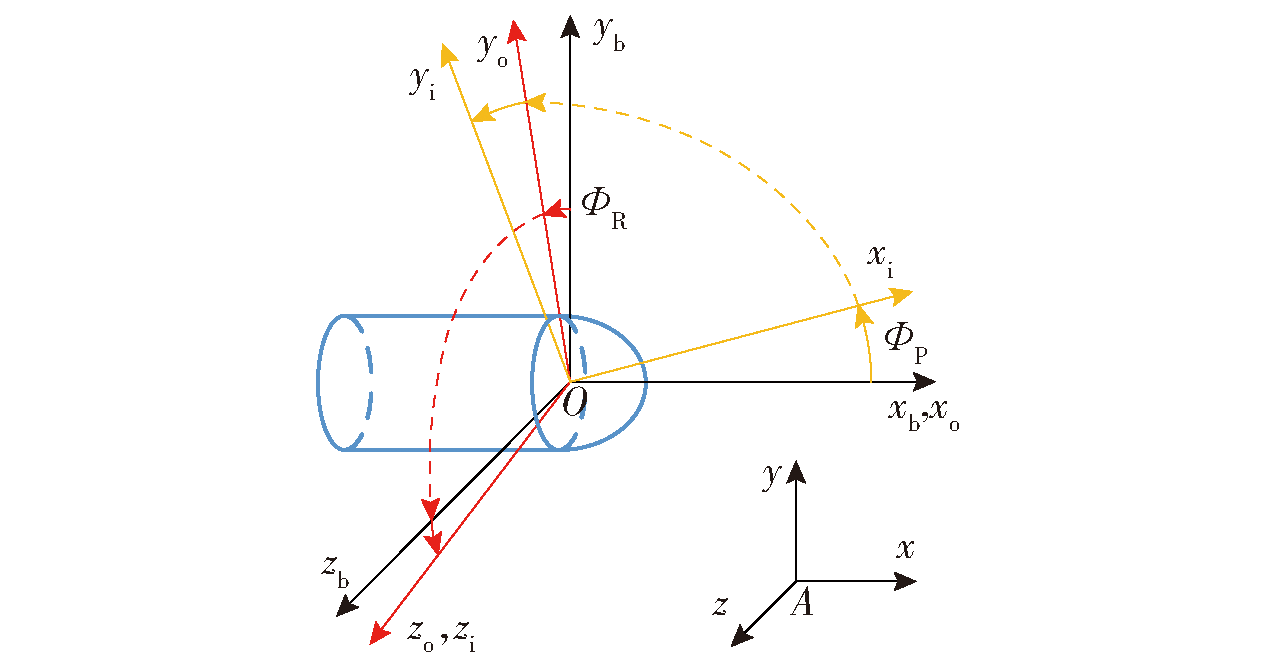
Fig.2 Coordinate system definition

Fig.3 Structural diagram of Coude optical system

Fig.4 Infrared detector field of view

Fig.5 Gyro installation position

Fig.6 Schematic diagram of closed-loop stable tracking

Fig.7 Experimental system for tracking

Fig.8 Target imaging in the field of view

Fig.9 Target tracking status after executing tracking instructions

Fig.10 Motion trajectory of target in the field of view

Fig.11 racking accuracy of coordinate conversion method

Fig.12 Tracking accuracy of the eliminating image rotation method
| [1] |
程丹松, 王康, 李晨博, 等. 导引头跟踪精度影响因素分析系统设计[J]. 智能计算机与应用, 2022, 12(9):214-221.
|
|
|
|
| [2] |
段鹏飞. 空空导弹小/微型化发展趋势与启示[J]. 航空兵器, 2021, 28(3):18-21.
|
|
|
|
| [3] |
马俊林, 邢妍, 高群, 等. 微小型滚仰式红外导引头光机轴系一体化设计[J]. 红外技术, 2021, 43(5):411-416.
|
|
|
|
| [4] |
孙赤全, 赵侃, 孟军合, 等. 滚仰式导引头红外光学系统设计[J]. 红外与激光工程, 2017, 46(2):152-157.
|
|
|
|
| [5] |
张鑫, 贾宏光. 90°离轴角红外滚仰式导引头光学系统[J]. 红外与激光工程, 2013, 42(1):143-147.
|
|
|
|
| [6] |
任淼, 刘晶晶, 文琳. 2021年国外空空导弹发展动态研究[J]. 航空兵器, 2022, 29(4):33-41.
|
|
|
|
| [7] |
任淼, 刘晶晶, 刘凯, 等. 2022年国外空空导弹发展动态研究[J]. 航空兵器, 2023, 30(4):33-41.
|
|
|
|
| [8] |
王志伟, 祁载康, 王江. 滚-仰式导引头跟踪原理[J]. 红外与激光工程, 2008, 178(2):274-277.
|
|
|
|
| [9] |
朱明超, 贾宏光. 基于Paden-Kahan子问题求解滚仰式导引头角增量[J]. 光学精密工程, 2011, 19(8):1838-1844.
|
|
|
|
| [10] |
陈思远, 谢伟, 刘石祥, 等. 滚仰式导引头稳定和跟踪特性研究[J]. 电子机械工程, 2021, 37(2):60-64.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
马杰, 吴志勇. 光电测量系统故障诊断中跟踪误差预测的CS-BP算法研究[J]. 光电工程, 2022, 49(8):66-74.
|
|
|
|
| [15] |
白瑞. 滚仰导引头关键技术及其在空空导弹上的应用研究[D]. 北京: 北京理工大学, 2017.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
金秋延, 刘福祥, 王新春, 等. 滚仰式导引头斜置方案下的过顶奇异问题控制策略[J]. 兵工学报, 2024, 45 (2): 628-640.
doi: 10.12382/bgxb.2022.0631 |
|
|
|
| [19] |
袁东明, 丁亚林, 张健. 应用分块三次多项式的导引头测角精度标定[J]. 兵工学报, 2019, 40(10):2042-2049.
doi: 10.3969/j.issn.1000-1093.2019.10.009 |
|
doi: 10.3969/j.issn.1000-1093.2019.10.009 |
|
| [20] |
赵明, 白杨, 刘慧, 等. 导引头稳定平台指向误差建模与参数标定[J]. 红外与激光工程, 2013, 42(增刊2):374-379.
|
|
|
|
| [21] |
赵毅鑫, 崔颢, 陈晓曾, 等. 滚仰式半捷联光电稳定平台误差分析与补偿[J]. 航空兵器, 2021, 28(6):53-57.
|
|
|
| [1] | JIN Qiuyan, LIU Fuxiang, WANG Xinchun, LIU Xiao, MO Bo. The Control Strategy of Zenith-pass Singularity Problem Under the Roll-pitch Seeker Oblique Scheme [J]. Acta Armamentarii, 2024, 45(2): 628-640. |
| [2] | QIANG Hongbin, DU Liangliang, KANG Shaopeng, LIU Kailei, ZHOU Ling, ZENG Shuisheng. Kinematics and Dynamics Modeling of 1T2R Heavy-load Parallel Stabilized Platform with Analytical Solution [J]. Acta Armamentarii, 2024, 45(11): 3959-3969. |
| [3] | ZHU Qixin, JIANG Chenyan, ZHANG Guoping, ZHU Yonghong. Identification of Mechanical Parameters of Permanent Magnet Servo System Based on Orthogonal Characteristics of Trigonometric Function [J]. Acta Armamentarii, 2023, 44(6): 1820-1828. |
| [4] | ZHAO Fei, LOU Wenzhong, FENG Huanzhen, SU Zilong, WANG Jinkui, XUAN Weikun. Long-Distance Aerial Target Detection Technology of Counter-UAV Image Seeker [J]. Acta Armamentarii, 2023, 44(4): 1023-1033. |
| [5] | LI Guofei, TANG Qingpu, WU Yunjie. Cooperative Guidance Method of Leader and Seeker-less Follower Flight Vehicles [J]. Acta Armamentarii, 2023, 44(11): 3436-3446. |
| [6] | CUI Mengxi,HAO Hongxu, WANG Xinxing,MENG Liangfei,MAO Yutian,WAN Ke,LIU Yunzhen,ZHANG Yan. Rapid Estimation Method for Miss Distance of Rocket Projectile Based on Coupled Seeker-Projectile Model and AdjointGuidance System [J]. Acta Armamentarii, 2022, 43(10): 2554-2564. |
| [7] | ZHOU Jianping, LI Wei, WEN Qiuqiu, XIA Qunli, JIANG Huan. Stability Design of Spinning Missile Autopilot Considering Parasitical Loop of Roll-pitch Seeker [J]. Acta Armamentarii, 2022, 43(1): 1-10. |
| [8] | CHEN Ke, ZHANG Yongfei, WANG Dulin, LIU Zijun, FU Xiaogang. Analysis of the Minor Deformation of Imaging Primary Mirror Supporting Platform of Missile at Low Temperature [J]. Acta Armamentarii, 2021, 42(12): 2637-2645. |
| [9] | ZOU Ruping, LIU Jianshu. Multi-target Tracking and Recognition Technology Based on PHD and UKF [J]. Acta Armamentarii, 2020, 41(8): 1502-1508. |
| [10] | JIN Bingyang, LIU Zheng, QIN Jikai. Two-stage Real-time Track Correlation Algorithm Based on Gray Correlation [J]. Acta Armamentarii, 2020, 41(7): 1330-1338. |
| [11] | ZHAO Jianbo, YANG Shuxing, XIONG Fenfen. Cooperative Localization and Guidance for Seeker-less Missile Based on Leader-follower Framework [J]. Acta Armamentarii, 2019, 40(4): 673-679. |
| [12] | YUAN Dongming, DING Yalin, ZHANG Jian. Calibration of Seeker Angle-measuring Error with Block Three-order Polynomial [J]. Acta Armamentarii, 2019, 40(10): 2042-2049. |
| [13] | LI Bo, HAN Yue, DING Xiang, LI Xi-tong. Radar and Infrared Compound Guidance Method for Air-to-ground Missile Attacking Ground Group Target [J]. Acta Armamentarii, 2018, 39(5): 919-926. |
| [14] | BAI Rui, XIA Qun-li, DU Xiao, LU Tian-yu. Test of Parasitic Loop Quality of Strapdown Seeker [J]. Acta Armamentarii, 2017, 38(3): 494-500. |
| [15] | HUANG Jing, LI Chang-chun, YAN Hao, YANG Xue-song, LI Jing. A New On-line Filtering Method Based on Improved EMD Algorithm [J]. Acta Armamentarii, 2016, 37(5): 929-935. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||