
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (9): 240981-.doi: 10.12382/bgxb.2024.0981
Previous Articles Next Articles
WANG Haodong1, MA Biao1, CHEN Man1,*( ), YU Liang1, TAN Yunlu1, LIU Yujian2
), YU Liang1, TAN Yunlu1, LIU Yujian2
Received:2024-10-22
Online:2025-09-24
Contact:
CHEN Man
CLC Number:
WANG Haodong, MA Biao, CHEN Man, YU Liang, TAN Yunlu, LIU Yujian. Obstacle Recognition and Traversability Analysis of Tracked Vehicles in Off-road Environment[J]. Acta Armamentarii, 2025, 46(9): 240981-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Schematic diagram of traversability analysis framework
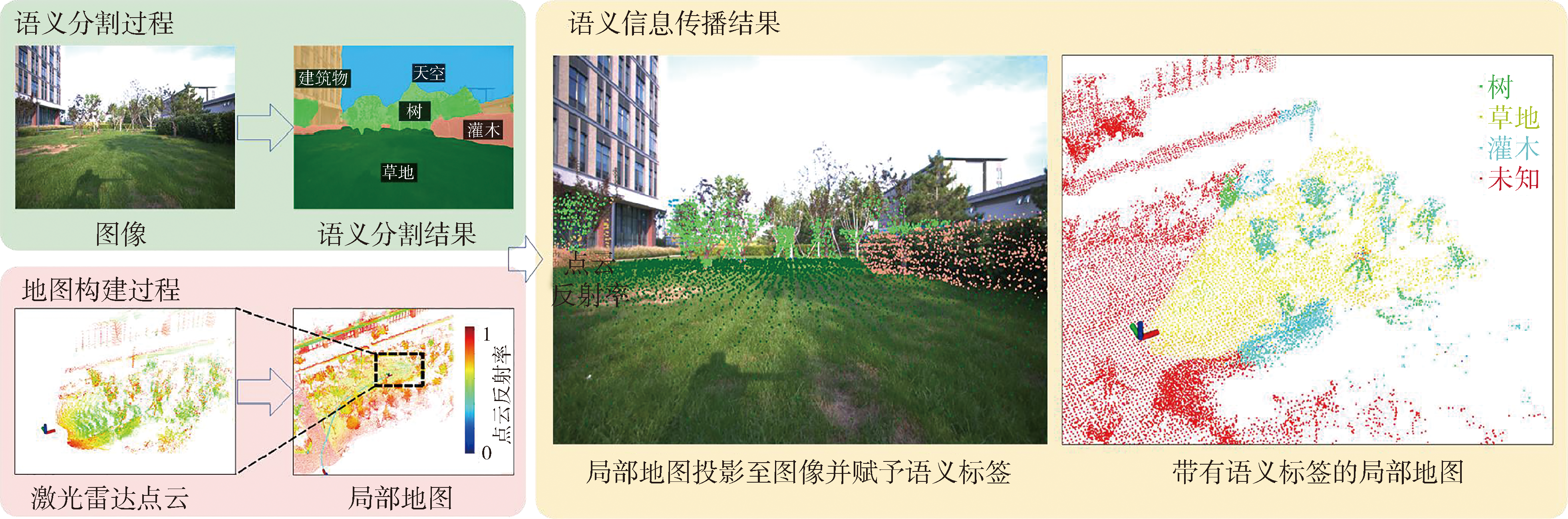
Fig.2 Diagram of semantic information propagation from 2D images to 3D point clouds
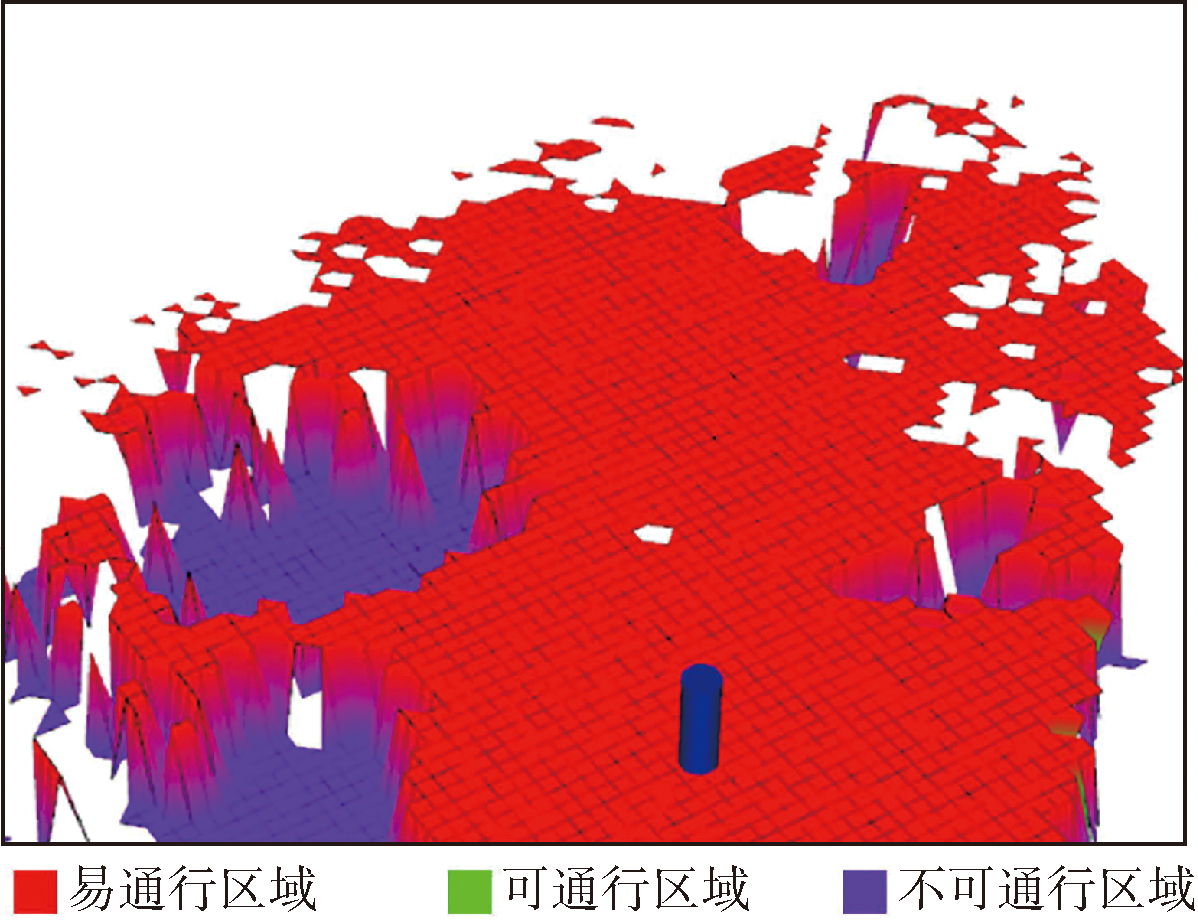
Fig.3 Schematic diagram of semantic-based hierarchical layers
| t/s | 单帧点云 | 局部地图 |
|---|---|---|
| 10.71 | | |
| 17.41 | | |
| 40.59 | | |
| 54.52 | | |
Table 1 Comparison between single frame point cloud and local map
| t/s | 单帧点云 | 局部地图 |
|---|---|---|
| 10.71 | | |
| 17.41 | | |
| 40.59 | | |
| 54.52 | | |

Fig.4 Construction results of elevation map
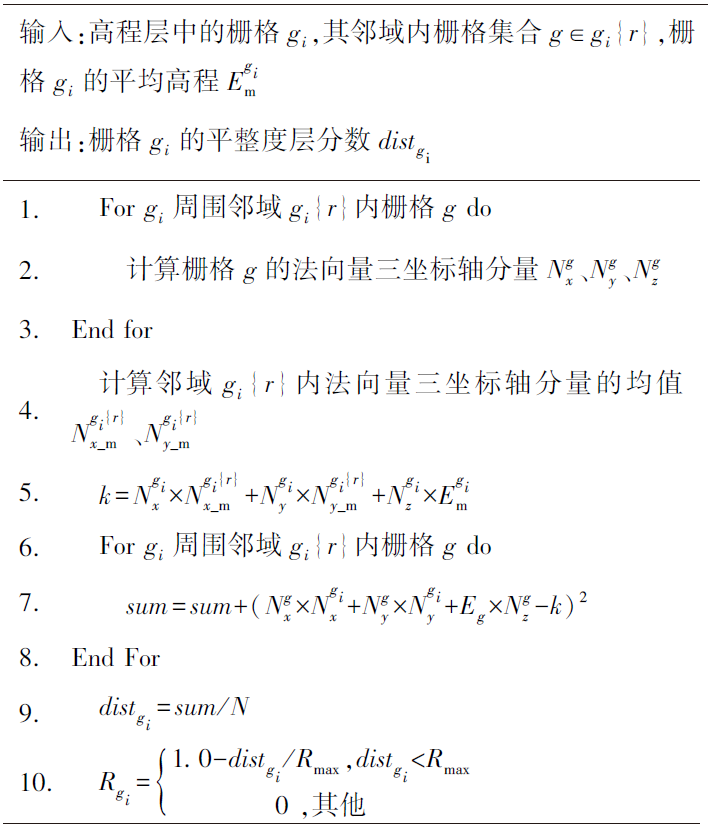
Fig.5 Roughness layer generation algorithm
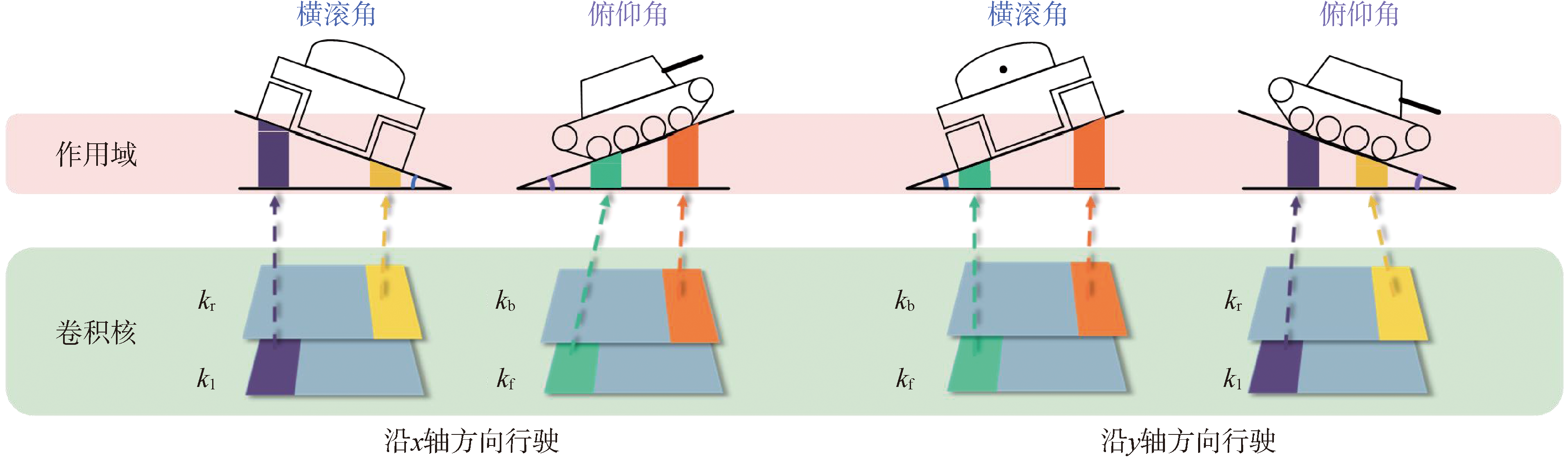
Fig.6 Schematic diagram of convolution kernel and angle estimation method
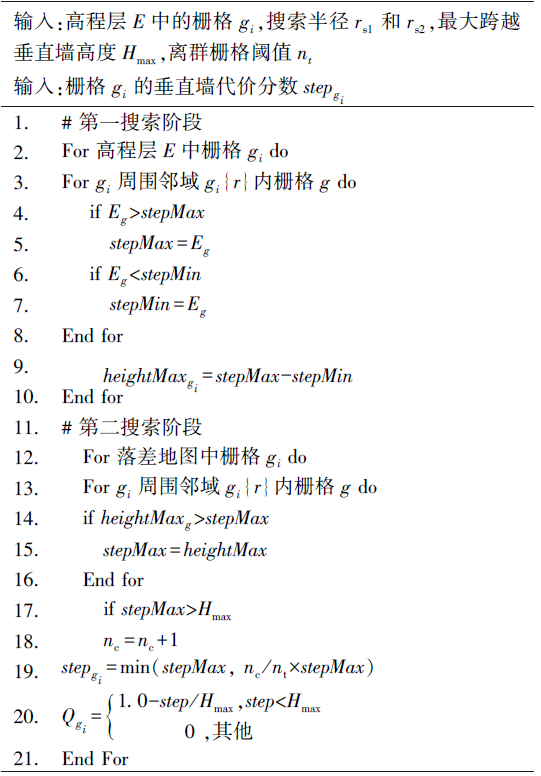
Fig.7 Vertical wall layer generation algorithm

Fig.8 Experimental tracked vehicles and sensor layout
| 参数 | 数值 |
|---|---|
| 底盘尺寸/mm | 1023×778×400 |
| 履带宽度/mm | 150 |
| 接地段长度/mm | 560 |
| 平台重量/kg | 约140 |
| 最大纵向爬坡角/(°) | 30 |
| 最大横向侧倾角/(°) | 22 |
| 最大越障高度/mm | 270 |
Table 2 Main parameters of the experimental platform
| 参数 | 数值 |
|---|---|
| 底盘尺寸/mm | 1023×778×400 |
| 履带宽度/mm | 150 |
| 接地段长度/mm | 560 |
| 平台重量/kg | 约140 |
| 最大纵向爬坡角/(°) | 30 |
| 最大横向侧倾角/(°) | 22 |
| 最大越障高度/mm | 270 |
| 类别 | 指标 |
|---|---|
| 栅格尺寸 | 0.15m |
| 地图长×宽 | 30×30m |
| 最大离群值nt | 6 |
| 平整度归一化参数Trough | 0.6 |
| 代价函数加权系数φ1、φ2和φ3 | 0.4、0.3、0.3 |
Table 3 Main parameters of using method
| 类别 | 指标 |
|---|---|
| 栅格尺寸 | 0.15m |
| 地图长×宽 | 30×30m |
| 最大离群值nt | 6 |
| 平整度归一化参数Trough | 0.6 |
| 代价函数加权系数φ1、φ2和φ3 | 0.4、0.3、0.3 |
| 级别 | 标签 | 代价分数 |
|---|---|---|
| 易通行 | 道路,人行道,草地,泥土 | 1.0 |
| 可通行 | 灌木,碎石,泥浆,水坑,沙地 | 0.6 |
| 不可通行 | 人,树,卡车,汽车,坦克,河流,湖泊,建筑物,天空 | 0.0 |
Table 4 Candidate class labels for open-vocabulary semantic segmentation method
| 级别 | 标签 | 代价分数 |
|---|---|---|
| 易通行 | 道路,人行道,草地,泥土 | 1.0 |
| 可通行 | 灌木,碎石,泥浆,水坑,沙地 | 0.6 |
| 不可通行 | 人,树,卡车,汽车,坦克,河流,湖泊,建筑物,天空 | 0.0 |
| 场景 | 图像 | 真值标签 | 语义分割结果 |
|---|---|---|---|
| 道路 | | | |
| 山丘 | | | |
Table 5 Semantic segmentation results of RELLIS-3D dataset
| 场景 | 图像 | 真值标签 | 语义分割结果 |
|---|---|---|---|
| 道路 | | | |
| 山丘 | | | |
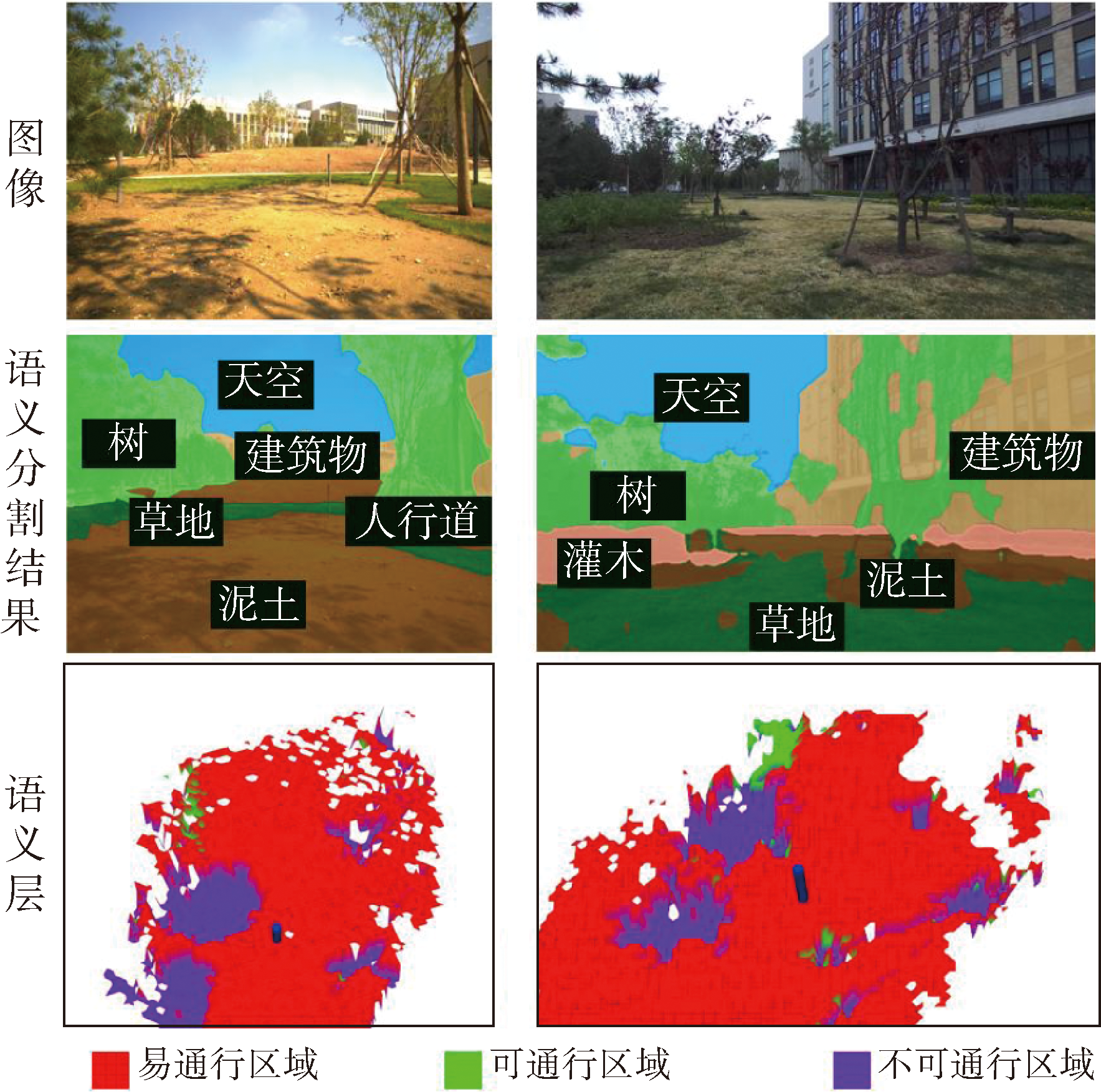
Fig.9 Semantic segmentation and construction of semantic layers
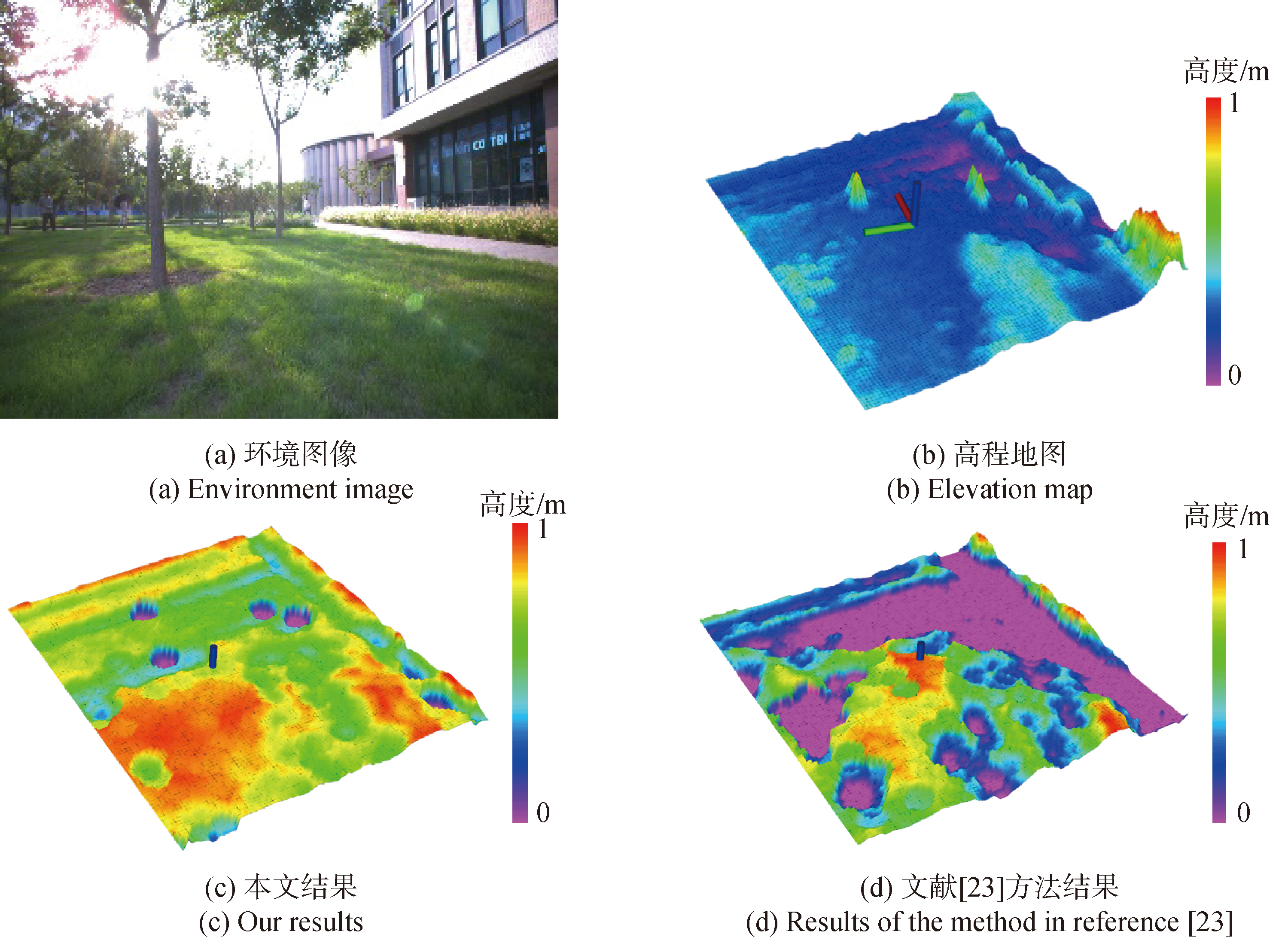
Fig.10 Construction results of roughness layer

Fig.11 Construction results of capacity constraint layer

Fig.12 Construction results of vertical wall layer
| 场景图像 | 本文方法 | 文献[17]方法 | 文献[24]方法 |
|---|---|---|---|
| | | | |
| | | | |
Table 6 Construction results and comparison of traversability layers
| 场景图像 | 本文方法 | 文献[17]方法 | 文献[24]方法 |
|---|---|---|---|
| | | | |
| | | | |
| [1] |
聂士达, 刘辉, 廖志昊, 等. 考虑复杂地形的越野环境无人车辆路径规划研究[J]. 机械工程学报, 2024, 60(10):261-272.
|
|
|
|
| [2] |
王建涛, 杨超, 刘帅帅, 等. 考虑系统噪声与载重未知的智能车路况辨识[J/OL]. 中国机械工程, 2025(2024-11-25)[2025-08-21]. http://kns.cnki.net/kcms/detail/42.1294.TH.20241125.1317.002.html.
|
|
|
|
| [3] |
胡林, 杨冬兆, 张新, 等. 基于DQP-LMPC的智能车超车换道动态路径规划[J]. 机械工程学报, 2024, 60(10):171-181.
|
|
|
|
| [4] |
张佳楠, 胡钊政, 孟杰, 等. 面向车-路-图协同的分布式自动驾驶仿真平台架构及应用[J]. 汽车工程, 2024, 46(8):1335-1345,1356.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
周梦如, 陈慧岩, 熊光明, 等. 越野环境下无人履带平台的道路可通行性分析[J]. 兵工学报, 2022, 43(10):2485-2496.
doi: 10.12382/bgxb.2021.0824 |
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
陶俊峰, 刘海鸥, 关海杰, 等. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11):3320-3332.
doi: 10.12382/bgxb.2023.0262 |
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [1] | HU Julin, HE Hongwen, HAN Xuefeng. A Multiple-road Type, Three-dimensional Driving Cycle Construction Method for Tracked Vehicles Based on Micro-motion Segments [J]. Acta Armamentarii, 2025, 46(9): 240881-. |
| [2] | ZHOU Le, YIN Qiaozhi, ZHONG Peilin, WEI Xiaohui, NIE Hong. Autonomous UAV Location Selection Technique Based on Data Fusion [J]. Acta Armamentarii, 2025, 46(8): 240751-. |
| [3] | WANG Cheng, QI Yifan, SUN Xueyan, DU Minggang, BIAN Jixuan, ZHANG Peng. Research on Shifting Shock Characteristics of Planetary Power-shift Steering Transmission for Tracked Vehicles [J]. Acta Armamentarii, 2025, 46(8): 240429-. |
| [4] | ZHAI Weiguang, WANG Feng, MA Xingyu, ZHAO Wei, MENG Pengshuai. YSG-SLAM:a Real-time Semantic RGB-D SLAM Based on YOLACT in Dynamic Scene [J]. Acta Armamentarii, 2025, 46(6): 240443-. |
| [5] | LU Xiaoran, ZOU Yuan, ZHANG Xudong, SUN Wei, MENG Yihao, ZHANG Bin. Energy Management Strategy Optimized by Munchausen-PER-DDQN for Hybrid Tracked Vehicle [J]. Acta Armamentarii, 2025, 46(6): 240498-. |
| [6] | ZHANG Senjie, GONG Jianwei, QI Jianyong, ZANG Zheng, HU Xiuzhong, GONG Xiaojie, XIONG Guangming. Lightweight Loop Closure Detection of Off-road Environment Based on Ground Features [J]. Acta Armamentarii, 2025, 46(4): 240090-. |
| [7] | DU Yunsheng, WANG Wenshuo, WEI Yuan, CHEN Huiyan. Modeling and Prediction of Driver’s Steering Control Behavior for Stepless Steering Tracked Vehicle [J]. Acta Armamentarii, 2024, 45(S2): 162-169. |
| [8] | LIU Kunlong, WANG Hu, LIU Xiaoqiang, NIU Shuaixu, HUANG Yi, FU Qi, ZHAO Tao. Illumination Perception and Feature Enhancement Network for RGB-T Semantic Segmentation [J]. Acta Armamentarii, 2024, 45(S1): 219-230. |
| [9] | NIE Wei, HE Hongwen, LEI Qiangshun, WAN Yiqiang. Characteristic Analysis of Damping Valve in Hydro-pneumatic Suspension of Tracked Vehicle Based on Bonding-diagram [J]. Acta Armamentarii, 2024, 45(8): 2728-2736. |
| [10] | TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment [J]. Acta Armamentarii, 2024, 45(7): 2110-2127. |
| [11] | WU Rui, YU Huilong, DONG Haotian, XI Junqiang. Refined Dynamics Modeling and Simulation of Special Tracked Vehicles [J]. Acta Armamentarii, 2024, 45(5): 1384-1401. |
| [12] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [13] | YUAN Yi, GAI Jiangtao, ZENG Gen, ZHOU Guangming, LI Xunming, MA Changjun. Analysis and Experimental Verification of Yaw Motion Response Characteristics of High-speed Tracked Vehicle [J]. Acta Armamentarii, 2024, 45(4): 1094-1107. |
| [14] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [15] | WANG Xu, LI Rui, HUANG Ying, SHEN Jiwei, SHANG Xianhe. Construction of Driving Cycle for Military Tracked Vehicles Considering Road Features [J]. Acta Armamentarii, 2024, 45(3): 907-915. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||