
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (6): 240443-.doi: 10.12382/bgxb.2024.0443
Previous Articles Next Articles
ZHAI Weiguang1, WANG Feng2,*, MA Xingyu1, ZHAO Wei1, MENG Pengshuai1
Received:2024-06-05
Online:2025-06-28
Contact:
WANG Feng
CLC Number:
ZHAI Weiguang, WANG Feng, MA Xingyu, ZHAO Wei, MENG Pengshuai. YSG-SLAM:a Real-time Semantic RGB-D SLAM Based on YOLACT in Dynamic Scene[J]. Acta Armamentarii, 2025, 46(6): 240443-.
Add to citation manager EndNote|Ris|BibTeX
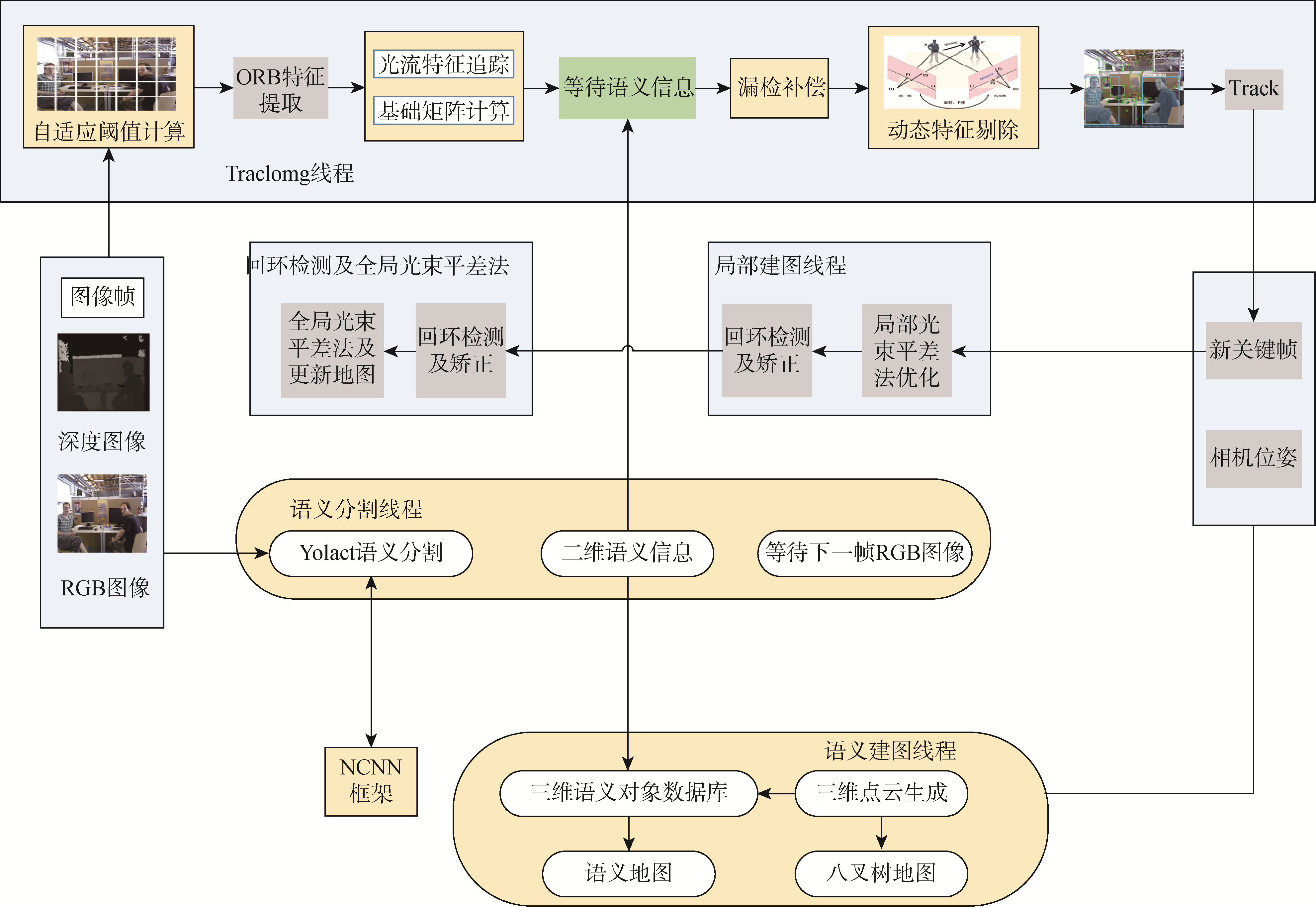
Fig.1 System framework

Fig.2 Comparison of feature extraction on fr3_w_xyz image sequence of TUM datasets

Fig.3 Projection process of edge points of missed detection objects

Fig.4 Flow chart of dynamic feature removal strategy
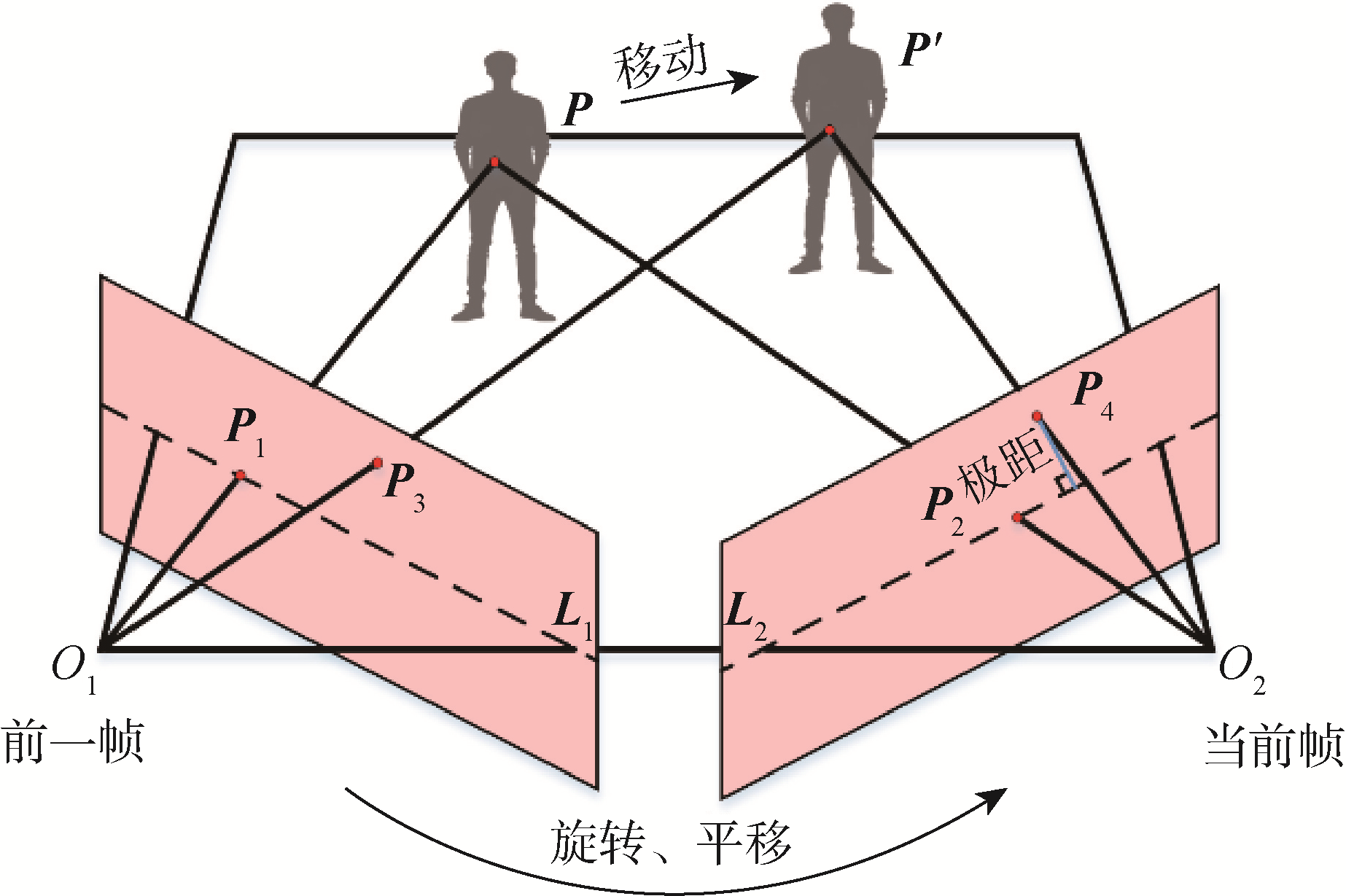
Fig.5 Epipolar constraint

Fig.6 Dynamic feature removal effect
| 图像序列 | 原始图像 | ORB-SLAM2 | YSG-SLAM |
|---|---|---|---|
| v_bird | | | |
| v_coffeehouse | | | |
| v_pomegranate | | | |
Table 1 Comparison of feature extraction effects of two algorithms on HPatches dataset
| 图像序列 | 原始图像 | ORB-SLAM2 | YSG-SLAM |
|---|---|---|---|
| v_bird | | | |
| v_coffeehouse | | | |
| v_pomegranate | | | |
| 两种算法及 提升率/% | 图像序列 | ||||
|---|---|---|---|---|---|
| v_bird | v_pomegranate | v_underground | v_dogman | v_coffeehouse | |
| ORB-SLAM2 | 4.65424 | 4.27598 | 4.50987 | 3.98462 | 3.88937 |
| YSG-SLAM | 5.65170 | 5.84350 | 5.69493 | 5.31122 | 5.69493 |
| 提升率/% | 21.0 | 36.7 | 30.6 | 33.3 | 46.4 |
Table 2 Two-dimensional distribution entropy results of two algorithms on different image sequences of Hpatches dataset
| 两种算法及 提升率/% | 图像序列 | ||||
|---|---|---|---|---|---|
| v_bird | v_pomegranate | v_underground | v_dogman | v_coffeehouse | |
| ORB-SLAM2 | 4.65424 | 4.27598 | 4.50987 | 3.98462 | 3.88937 |
| YSG-SLAM | 5.65170 | 5.84350 | 5.69493 | 5.31122 | 5.69493 |
| 提升率/% | 21.0 | 36.7 | 30.6 | 33.3 | 46.4 |
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.2899 | 0.2606 | 0.2484 | 0.1271 | 0.1619 | 0.1376 | 0.1136 | 0.0854 | 44.15 | 47.20 | 54.27 | 32.81 |
| fr3_w_half | 7.9219 | 4.4695 | 1.2568 | 6.5406 | 0.4142 | 0.3507 | 0.3022 | 0.2204 | 94.77 | 92.15 | 75.95 | 96.63 |
| fr3_w_rpy | 6.4220 | 4.5134 | 2.2990 | 4.5685 | 0.5450 | 0.4130 | 0.3233 | 0.3556 | 91.51 | 90.85 | 85.94 | 92.22 |
| fr3_w_xyz | 7.1415 | 5.6403 | 4.6159 | 4.3804 | 0.3997 | 0.2816 | 0.2298 | 0.2836 | 94.40 | 95.01 | 95.02 | 93.53 |
Table 3 Comparison results of RPE in rotation part
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.2899 | 0.2606 | 0.2484 | 0.1271 | 0.1619 | 0.1376 | 0.1136 | 0.0854 | 44.15 | 47.20 | 54.27 | 32.81 |
| fr3_w_half | 7.9219 | 4.4695 | 1.2568 | 6.5406 | 0.4142 | 0.3507 | 0.3022 | 0.2204 | 94.77 | 92.15 | 75.95 | 96.63 |
| fr3_w_rpy | 6.4220 | 4.5134 | 2.2990 | 4.5685 | 0.5450 | 0.4130 | 0.3233 | 0.3556 | 91.51 | 90.85 | 85.94 | 92.22 |
| fr3_w_xyz | 7.1415 | 5.6403 | 4.6159 | 4.3804 | 0.3997 | 0.2816 | 0.2298 | 0.2836 | 94.40 | 95.01 | 95.02 | 93.53 |
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0093 | 0.0082 | 0.0074 | 0.0044 | 0.0053 | 0.0046 | 0.0040 | 0.0026 | 43.01 | 43.90 | 45.95 | 40.91 |
| fr3_w_half | 0.3685 | 0.2072 | 0.0491 | 0.3047 | 0.0137 | 0.0114 | 0.0096 | 0.0076 | 96.28 | 94.50 | 80.45 | 97.51 |
| fr3_w_rpy | 0.3374 | 0.2344 | 0.1137 | 0.2426 | 0.0221 | 0.0163 | 0.0121 | 0.0149 | 93.45 | 93.05 | 89.36 | 93.86 |
| fr3_w_xyz | 0.3752 | 0.2944 | 0.2394 | 0.2326 | 0.0128 | 0.0102 | 0.0084 | 0.0078 | 96.59 | 96.54 | 96.49 | 96.65 |
Table 4 Comparison results of RPE in translation part
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0093 | 0.0082 | 0.0074 | 0.0044 | 0.0053 | 0.0046 | 0.0040 | 0.0026 | 43.01 | 43.90 | 45.95 | 40.91 |
| fr3_w_half | 0.3685 | 0.2072 | 0.0491 | 0.3047 | 0.0137 | 0.0114 | 0.0096 | 0.0076 | 96.28 | 94.50 | 80.45 | 97.51 |
| fr3_w_rpy | 0.3374 | 0.2344 | 0.1137 | 0.2426 | 0.0221 | 0.0163 | 0.0121 | 0.0149 | 93.45 | 93.05 | 89.36 | 93.86 |
| fr3_w_xyz | 0.3752 | 0.2944 | 0.2394 | 0.2326 | 0.0128 | 0.0102 | 0.0084 | 0.0078 | 96.59 | 96.54 | 96.49 | 96.65 |
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0087 | 0.0078 | 0.0072 | 0.0039 | 0.0056 | 0.0048 | 0.0042 | 0.0029 | 35.63 | 38.46 | 41.67 | 25.64 |
| fr3_w_half | 0.4462 | 0.4096 | 0.3860 | 0.1770 | 0.0185 | 0.0163 | 0.0149 | 0.0087 | 95.85 | 96.02 | 96.14 | 95.08 |
| fr3_w_rpy | 0.5396 | 0.5012 | 0.4974 | 0.1999 | 0.0264 | 0.0218 | 0.0186 | 0.0148 | 95.11 | 95.65 | 96.26 | 92.60 |
| fr3_w_xyz | 0.6826 | 0.6086 | 0.6661 | 0.3091 | 0.0133 | 0.0112 | 0.0099 | 0.0071 | 98.05 | 98.16 | 98.51 | 97.70 |
Table 5 Comparison results of ATE
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0087 | 0.0078 | 0.0072 | 0.0039 | 0.0056 | 0.0048 | 0.0042 | 0.0029 | 35.63 | 38.46 | 41.67 | 25.64 |
| fr3_w_half | 0.4462 | 0.4096 | 0.3860 | 0.1770 | 0.0185 | 0.0163 | 0.0149 | 0.0087 | 95.85 | 96.02 | 96.14 | 95.08 |
| fr3_w_rpy | 0.5396 | 0.5012 | 0.4974 | 0.1999 | 0.0264 | 0.0218 | 0.0186 | 0.0148 | 95.11 | 95.65 | 96.26 | 92.60 |
| fr3_w_xyz | 0.6826 | 0.6086 | 0.6661 | 0.3091 | 0.0133 | 0.0112 | 0.0099 | 0.0071 | 98.05 | 98.16 | 98.51 | 97.70 |
| 图像序列 | ORB-SLAM2 | YSG-SLAM |
|---|---|---|
| fr3_s_static | | |
| fr3_w_half | | |
| fr3_w_rpy | | |
| fr3_w_xyz | | |
Table 6 Comparative results of ATEs of two systems on TUM dataset
| 图像序列 | ORB-SLAM2 | YSG-SLAM |
|---|---|---|
| fr3_s_static | | |
| fr3_w_half | | |
| fr3_w_rpy | | |
| fr3_w_xyz | | |
| 图像序列 | AHY-SLAM | DS-SLAM | DynaSLAM | SG-SLAM | RDS-SLAM | YSG-SLAM | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | |
| fr3_s_static | 0.0081 | 0.0047 | 0.0065 | 0.0033 | 0.006 | - | 0.0060 | 0.0053 | 0.0084 | 0.0043 | 0.0056 | 0.0029 |
| fr3_w_half | 0.0309 | 0.0156 | 0.0303 | 0.0159 | 0.025 | - | 0.0268 | 0.0134 | 0.0807 | 0.0454 | 0.0185 | 0.0087 |
| fr3_w_rpy | 0.1843 | 0.1538 | 0.4442 | 0.2350 | 0.035 | - | 0.0324 | 0.0187 | 0.1604 | 0.0873 | 0.0264 | 0.0148 |
| fr3_w_xyz | 0.0178 | 0.0096 | 0.0247 | 0.0161 | 0.015 | - | 0.0152 | 0.0075 | 0.0571 | 0.0229 | 0.0133 | 0.0071 |
Table 7 Comparison of ATEs of YSG-SLAM and similar SOTA
| 图像序列 | AHY-SLAM | DS-SLAM | DynaSLAM | SG-SLAM | RDS-SLAM | YSG-SLAM | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | |
| fr3_s_static | 0.0081 | 0.0047 | 0.0065 | 0.0033 | 0.006 | - | 0.0060 | 0.0053 | 0.0084 | 0.0043 | 0.0056 | 0.0029 |
| fr3_w_half | 0.0309 | 0.0156 | 0.0303 | 0.0159 | 0.025 | - | 0.0268 | 0.0134 | 0.0807 | 0.0454 | 0.0185 | 0.0087 |
| fr3_w_rpy | 0.1843 | 0.1538 | 0.4442 | 0.2350 | 0.035 | - | 0.0324 | 0.0187 | 0.1604 | 0.0873 | 0.0264 | 0.0148 |
| fr3_w_xyz | 0.0178 | 0.0096 | 0.0247 | 0.0161 | 0.015 | - | 0.0152 | 0.0075 | 0.0571 | 0.0229 | 0.0133 | 0.0071 |
| 图像序列 | ORB-SLAM2 | SG-SLAM | YSG-SLAM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| crowd_1 | 0.8632 | 0.6284 | 0.3592 | 0.5918 | 0.0234 | 0.0185 | 0.0161 | 0.0143 | 0.0742 | 0.0667 | 0.0572 | 0.0323 |
| m_n_box1 | 0.1174 | 0.0935 | 0.0785 | 0.0710 | 0.0192 | 0.0174 | 0.0156 | 0.0081 | 0.0447 | 0.0269 | 0.0219 | 0.0357 |
| p_tracking_2 | 1.0679 | 0.9590 | 0.8732 | 0.4699 | 0.0376 | 0.0343 | 0.0312 | 0.0154 | 0.0336 | 0.0262 | 0.0254 | 0.0163 |
| synchronous_1 | 1.1411 | 0.9884 | 0.9179 | 0.5703 | 0.3229 | 0.2665 | 0.1722 | 0.1824 | 0.0609 | 0.0058 | 0.0056 | 0.0032 |
Table 8 Comparison of absolute trajectory errors on Boon dataset
| 图像序列 | ORB-SLAM2 | SG-SLAM | YSG-SLAM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| crowd_1 | 0.8632 | 0.6284 | 0.3592 | 0.5918 | 0.0234 | 0.0185 | 0.0161 | 0.0143 | 0.0742 | 0.0667 | 0.0572 | 0.0323 |
| m_n_box1 | 0.1174 | 0.0935 | 0.0785 | 0.0710 | 0.0192 | 0.0174 | 0.0156 | 0.0081 | 0.0447 | 0.0269 | 0.0219 | 0.0357 |
| p_tracking_2 | 1.0679 | 0.9590 | 0.8732 | 0.4699 | 0.0376 | 0.0343 | 0.0312 | 0.0154 | 0.0336 | 0.0262 | 0.0254 | 0.0163 |
| synchronous_1 | 1.1411 | 0.9884 | 0.9179 | 0.5703 | 0.3229 | 0.2665 | 0.1722 | 0.1824 | 0.0609 | 0.0058 | 0.0056 | 0.0032 |
| 图像序列 | YSG-SLAM(S) | YSG-SLAM(G) | YSG-SLAM(S+G) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0058 | 0.0042 | 0.0046 | 0.0033 | 0.0059 | 0.0052 | 0.0046 | 0.0028 | 0.0056 | 0.0048 | 0.0042 | 0.0029 |
| fr3_w_half | 0.0186 | 0.0163 | 0.0149 | 0.0089 | 0.0547 | 0.0440 | 0.0376 | 0.0392 | 0.0185 | 0.0163 | 0.0149 | 0.0087 |
| fr3_w_rpy | 0.0513 | 0.0400 | 0.0314 | 0.0320 | 0.0358 | 0.0322 | 0.0306 | 0.0155 | 0.0264 | 0.0218 | 0.0186 | 0.0148 |
| fr3_w_xyz | 0.0139 | 0.0116 | 0.0105 | 0.0076 | 0.1326 | 0.1222 | 0.1038 | 0.0620 | 0.0133 | 0.0112 | 0.0099 | 0.0071 |
Table 9 Ablation experiment of absolute trajectory error
| 图像序列 | YSG-SLAM(S) | YSG-SLAM(G) | YSG-SLAM(S+G) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0058 | 0.0042 | 0.0046 | 0.0033 | 0.0059 | 0.0052 | 0.0046 | 0.0028 | 0.0056 | 0.0048 | 0.0042 | 0.0029 |
| fr3_w_half | 0.0186 | 0.0163 | 0.0149 | 0.0089 | 0.0547 | 0.0440 | 0.0376 | 0.0392 | 0.0185 | 0.0163 | 0.0149 | 0.0087 |
| fr3_w_rpy | 0.0513 | 0.0400 | 0.0314 | 0.0320 | 0.0358 | 0.0322 | 0.0306 | 0.0155 | 0.0264 | 0.0218 | 0.0186 | 0.0148 |
| fr3_w_xyz | 0.0139 | 0.0116 | 0.0105 | 0.0076 | 0.1326 | 0.1222 | 0.1038 | 0.0620 | 0.0133 | 0.0112 | 0.0099 | 0.0071 |
| SLAM系统 | 平均每帧 处理时间/ms | 硬件平台 |
|---|---|---|
| ORB-SLAM2 | 30.04 | AMD Ryzen 7 4800H,Nvidia GTX 1650 |
| YSG-SLAM(本文系统) | 48.09 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| RDS-SLAM | 57.50 | Nvidia RTX 2080Ti GPU |
| RDS-SLAM(本地环境) | 54.78 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| DS-SLAM | 59.40 | Intel i7 CPU,P4000 GPU |
| DS-SLAM(本地环境) | 56.32 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| YOLACT based SLAM | 58.80 | i7-9700K CPU,Nvidia RTX 2080,48GB RAM |
| YOLACT based SLAM (本地环境) | 55.48 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| SG-SLAM | 39.51 | AMD Ryzen 7 4800H,Nvidia GTX 1650 |
| AHY-SLAM | 71.78 | Intel Core i5-4228U CPU |
| DynaSLAM | 192.00 | Nvidia Tesla M40 GPU |
Table 10 Real-time comparison of similar algorithms
| SLAM系统 | 平均每帧 处理时间/ms | 硬件平台 |
|---|---|---|
| ORB-SLAM2 | 30.04 | AMD Ryzen 7 4800H,Nvidia GTX 1650 |
| YSG-SLAM(本文系统) | 48.09 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| RDS-SLAM | 57.50 | Nvidia RTX 2080Ti GPU |
| RDS-SLAM(本地环境) | 54.78 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| DS-SLAM | 59.40 | Intel i7 CPU,P4000 GPU |
| DS-SLAM(本地环境) | 56.32 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| YOLACT based SLAM | 58.80 | i7-9700K CPU,Nvidia RTX 2080,48GB RAM |
| YOLACT based SLAM (本地环境) | 55.48 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| SG-SLAM | 39.51 | AMD Ryzen 7 4800H,Nvidia GTX 1650 |
| AHY-SLAM | 71.78 | Intel Core i5-4228U CPU |
| DynaSLAM | 192.00 | Nvidia Tesla M40 GPU |
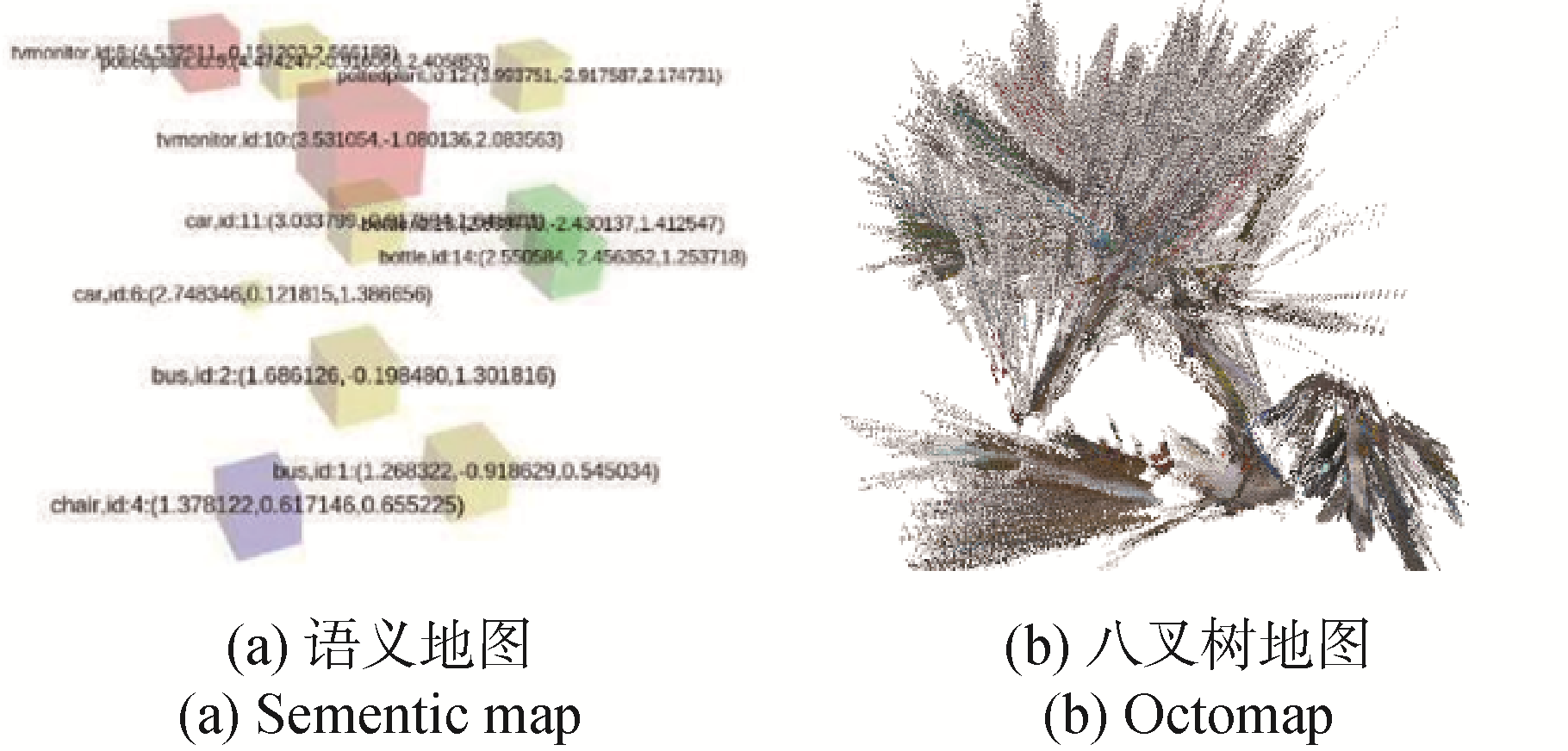
Fig.7 Mapping results on Market 1-3 sequence of OpenLORIS-Scene dataset
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
张福斌, 张炳烁, 杨玉帅. 基于单目/IMU/里程计融合的 SLAM 算法[J]. 兵工学报, 2022, 43(11):2810-2818.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
孙浩, 王朋. 一种基于区域划分的改进ORB算法[J]. 北京航空航天大学学报, 2020, 46(9):1763-1769.
|
|
|
|
| [27] |
|
| [28] |
|
| [1] | ZHAO Wei, WANG Feng, MA Xingyu, ZHAI Weiguang, MENG Pengshuai. Visual SLAM Algorithm Based on Dynamic Region Exclusion and Dense Map Construction [J]. Acta Armamentarii, 2025, 46(3): 240217-. |
| [2] | LIU Kunlong, WANG Hu, LIU Xiaoqiang, NIU Shuaixu, HUANG Yi, FU Qi, ZHAO Tao. Illumination Perception and Feature Enhancement Network for RGB-T Semantic Segmentation [J]. Acta Armamentarii, 2024, 45(S1): 219-230. |
| [3] | SUN Hao, LI Haiqing, LIANG Yan, MA Chaoxiong, WU Han. Dynamic Penetration Decision of Loitering Munition Group Based on Knowledge-assisted Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(9): 3161-3176. |
| [4] | YUE Shengzhe, WANG Zhengjie. A SLAM in Dynamic Environment Based on Instance Segmentation and Optical Flow [J]. Acta Armamentarii, 2024, 45(1): 156-165. |
| [5] | WANG Qiang, WU Letian, LI Hong, WANG Yong, WANG Huan, YANG Wankou. An Infrared Small Target Detection Method via Dual Network Collaboration [J]. Acta Armamentarii, 2023, 44(10): 3165-3176. |
| [6] | ZHU Hang, ZHANG Shu-ning, ZHAO Hui-chang. Single Channel Source Separation and Parameters Estimation of Multi-component PRBC-LFM Signal [J]. Acta Armamentarii, 2014, 35(9): 1363-1374. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||