
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (6): 240498-.doi: 10.12382/bgxb.2024.0498
Previous Articles Next Articles
LU Xiaoran1, ZOU Yuan1,*( ), ZHANG Xudong1, SUN Wei1, MENG Yihao1, ZHANG Bin2
), ZHANG Xudong1, SUN Wei1, MENG Yihao1, ZHANG Bin2
Received:2024-06-24
Online:2025-06-28
Contact:
ZOU Yuan
CLC Number:
LU Xiaoran, ZOU Yuan, ZHANG Xudong, SUN Wei, MENG Yihao, ZHANG Bin. Energy Management Strategy Optimized by Munchausen-PER-DDQN for Hybrid Tracked Vehicle[J]. Acta Armamentarii, 2025, 46(6): 240498-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Series hybrid-electric tracked vehicle
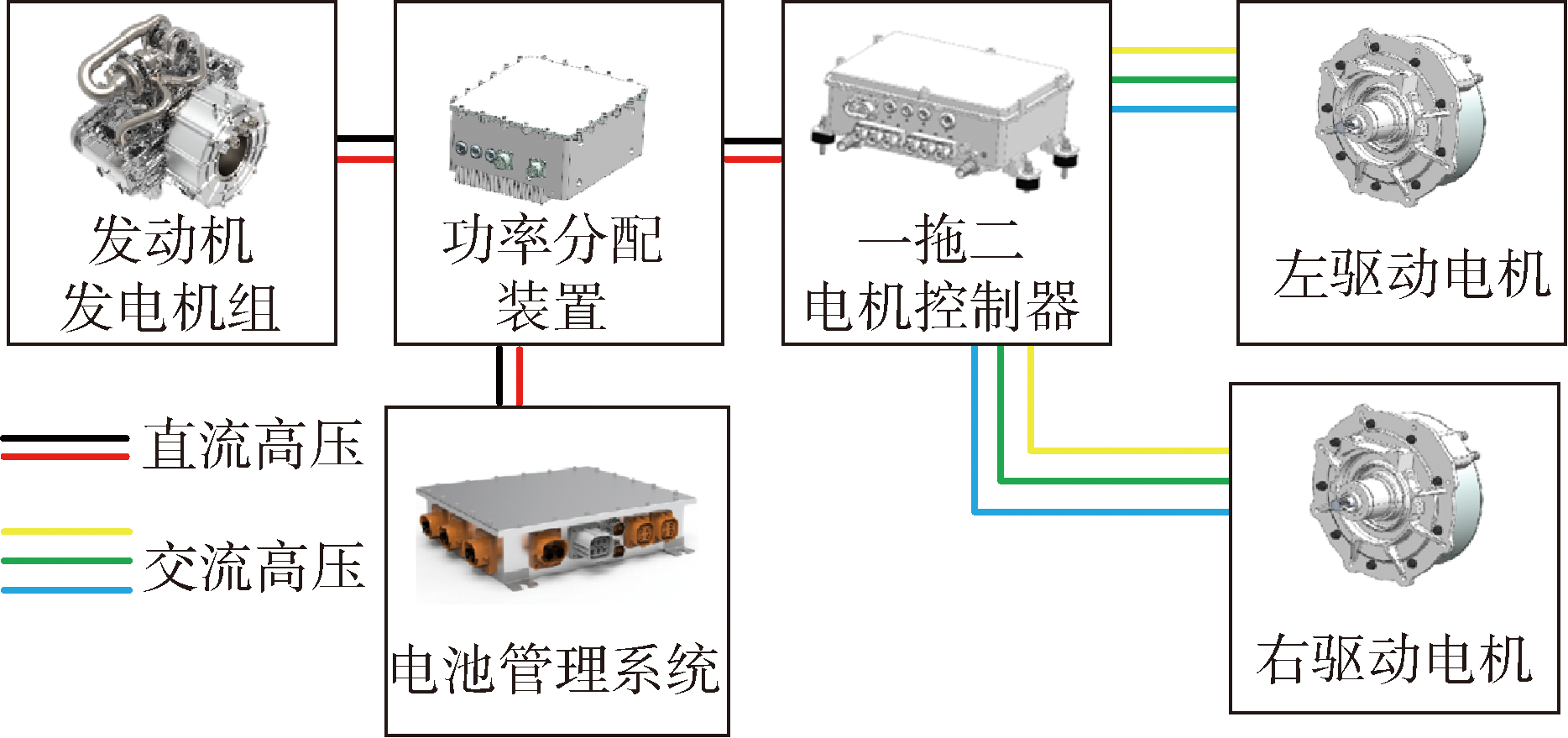
Fig.2 Topological structure of powertrain
| 名称 | 参数 | 数值 |
|---|---|---|
| 车辆参数 | 整车总质量/(m·kg-1) | 1500 |
| 重力加速度g/(kg·m-2) | 9.8 | |
| 滚动阻力系数f | 0.0494 | |
| 履带接地长度L/m | 1.6 | |
| 迎风面积A/m2 | 0.91 | |
| 传动效率η | 0.92 | |
| 空气阻力系数Cd | 0.9 | |
| 发电机参数 | 发电机转动惯量Je/(kg·m2) | 0.207 |
| 峰值功率/kW | 30 | |
| 反电动势系数Ke/(V·(rad/s)-1) | 1.8024 | |
| 等效阻抗系数Kx/(N·m·A-2) | 0.0098 | |
| 动力电池参数 | 动力电池内阻Rin/Ω | 0.1 |
| 动力电池容量/(A·h) | 45.5 |
Table 1 Parameters of CyberTank Ⅱ
| 名称 | 参数 | 数值 |
|---|---|---|
| 车辆参数 | 整车总质量/(m·kg-1) | 1500 |
| 重力加速度g/(kg·m-2) | 9.8 | |
| 滚动阻力系数f | 0.0494 | |
| 履带接地长度L/m | 1.6 | |
| 迎风面积A/m2 | 0.91 | |
| 传动效率η | 0.92 | |
| 空气阻力系数Cd | 0.9 | |
| 发电机参数 | 发电机转动惯量Je/(kg·m2) | 0.207 |
| 峰值功率/kW | 30 | |
| 反电动势系数Ke/(V·(rad/s)-1) | 1.8024 | |
| 等效阻抗系数Kx/(N·m·A-2) | 0.0098 | |
| 动力电池参数 | 动力电池内阻Rin/Ω | 0.1 |
| 动力电池容量/(A·h) | 45.5 |
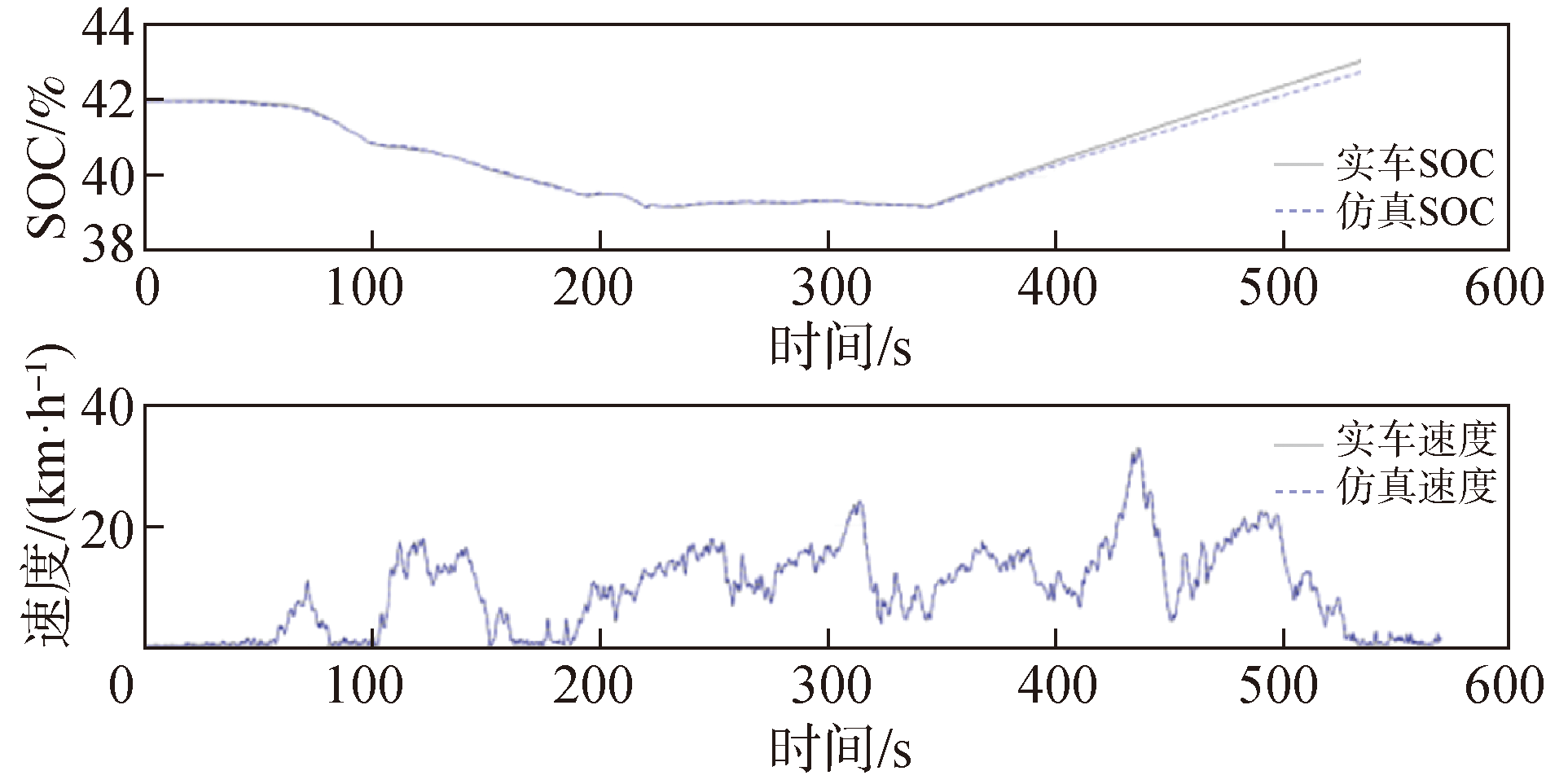
Fig.3 Comparison between simulated data and real data of SOC curve and vehicle speed curve

Fig.4 Framework of EMS based on Munchausen-PER-DDQN algorithm

Fig.5 Calculation flow of Munchause-PER-DDQN algorithm

Fig.6 Training condition of Munchausen-PER-DDQN algorithm
| 参数 | 数值 |
|---|---|
| Replay Buffer大小 | 8192 |
| 每个回合的训练步数 | 589 |
| Batch size | 64 |
| 折扣因子γ | 0.99 |
| 动作网络学习率lr | 0.0001 |
| 延迟更新参数d | 2 |
| 软更新参数τ | 0.005 |
| 优先采样权重调节因子β | 0.4 |
| 控制均匀采样和贪婪抽样的超参数α | 0.6 |
| 训练回合数 | 100 |
Table 2 Hyper parameters of Munchause-PER-DDQN algorithm
| 参数 | 数值 |
|---|---|
| Replay Buffer大小 | 8192 |
| 每个回合的训练步数 | 589 |
| Batch size | 64 |
| 折扣因子γ | 0.99 |
| 动作网络学习率lr | 0.0001 |
| 延迟更新参数d | 2 |
| 软更新参数τ | 0.005 |
| 优先采样权重调节因子β | 0.4 |
| 控制均匀采样和贪婪抽样的超参数α | 0.6 |
| 训练回合数 | 100 |
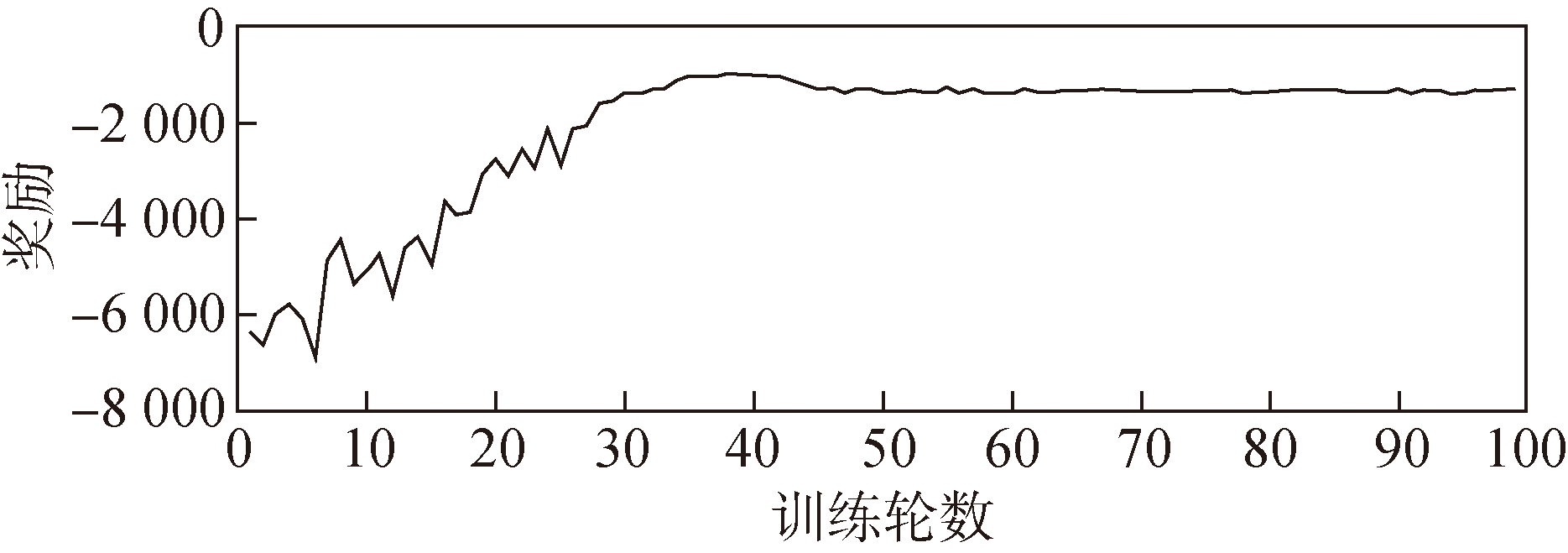
Fig.7 Reward curve of training process
| 参数 | 数值 |
|---|---|
| Replay Buffer大小 | 8192 |
| 每个回合的训练步数 | 589 |
| Batch size | 64 |
| 折扣因子γ | 0.99 |
| 动作网络学习率lr | 0.0001 |
| 延迟更新参数d | 2 |
| 软更新参数τ | 0.005 |
| 优先采样权重调节因子β | 0.4 |
| 控制均匀采样和贪婪抽样的超参数α | 0.6 |
| 训练回合数 | 35 |
Table 3 Hyper parameters of Munchause-PER-DDQN algorithm
| 参数 | 数值 |
|---|---|
| Replay Buffer大小 | 8192 |
| 每个回合的训练步数 | 589 |
| Batch size | 64 |
| 折扣因子γ | 0.99 |
| 动作网络学习率lr | 0.0001 |
| 延迟更新参数d | 2 |
| 软更新参数τ | 0.005 |
| 优先采样权重调节因子β | 0.4 |
| 控制均匀采样和贪婪抽样的超参数α | 0.6 |
| 训练回合数 | 35 |

Fig.8 SOC curves of TD 3-PER,DDQN and Munchausen-PER-DDQN algorithm
| 序号 | 算法 | 训练用时/s | 油量消耗/g |
|---|---|---|---|
| 1 | DDQN | 510 | 268 |
| 2 | 515 | 275 | |
| 3 | 521 | 267 | |
| 4 | 512 | 263 | |
| 5 | 511 | 266 | |
| 6 | TD3-PER | 918 | 259 |
| 7 | 918 | 264 | |
| 8 | 924 | 255 | |
| 9 | 899 | 265 | |
| 10 | 896 | 279 | |
| 11 | Munchausen-PER-DDQN | 620 | 250 |
| 12 | 603 | 251 | |
| 13 | 598 | 254 | |
| 14 | 521 | 252 | |
| 15 | 607 | 254 |
Table 4 Calculated training duration and fuel consumption of TD 3-PER,DDQN and Munchausen-PER-DDQN algorithms
| 序号 | 算法 | 训练用时/s | 油量消耗/g |
|---|---|---|---|
| 1 | DDQN | 510 | 268 |
| 2 | 515 | 275 | |
| 3 | 521 | 267 | |
| 4 | 512 | 263 | |
| 5 | 511 | 266 | |
| 6 | TD3-PER | 918 | 259 |
| 7 | 918 | 264 | |
| 8 | 924 | 255 | |
| 9 | 899 | 265 | |
| 10 | 896 | 279 | |
| 11 | Munchausen-PER-DDQN | 620 | 250 |
| 12 | 603 | 251 | |
| 13 | 598 | 254 | |
| 14 | 521 | 252 | |
| 15 | 607 | 254 |

Fig.9 Engine working positions under training condition

Fig.10 Two testing conditions based on vehicle data

Fig.11 Engine working positions under testing condition 1

Fig.12 Engine working positions under testing condition 2
| EMS算法 | 燃油消耗 | |
|---|---|---|
| 验证工况1 | 验证工况2 | |
| DDQN | 290 | 291 |
| TD3-PER | 281 | 281 |
| Munchausen-PER-DDQN | 263 | 275 |
Table 5 Calculated fuel consumption of TD 3-PER,DDQN and Munchausen-PER-DDQN algorithms under testing conditions 1and 2
| EMS算法 | 燃油消耗 | |
|---|---|---|
| 验证工况1 | 验证工况2 | |
| DDQN | 290 | 291 |
| TD3-PER | 281 | 281 |
| Munchausen-PER-DDQN | 263 | 275 |
| [1] |
孙逢春, 张承宁. 装甲车辆混合动力电传动技术[M]. 北京: 国防工业出版社, 2008.
|
|
|
|
| [2] |
侯旭朝, 马越, 项昌乐. 电驱动履带车辆转向稳定性控制研究[J]. 机械工程学报, 2024, 60(8):233-244.
|
|
|
|
| [3] |
邹渊, 焦飞翔, 崔星. 等. 地面无人平台动力源集成技术发展综述[J]. 兵工学报, 2020, 41(10):2132-2140.
|
|
|
|
| [4] |
|
| [5] |
赵秀春, 郭戈. 混合动力电动汽车能量管理策略研究综述[J]. 自动化学报, 2016, 42(3):321-334.
|
|
|
|
| [6] |
张卫青. 混合动力汽车的发展现状及其关键技术[J]. 重庆理工大学学报, 2006, 20(5):19-22.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
唐小林, 郎陈佳, 郑林洋, 等. 智能网联混合动力汽车能量管理研究综述[J]. 重庆理工大学学报, 2023, 37(9):1-12.
|
|
|
|
| [10] |
|
| [11] |
邓富昌, 张校锋. 基于规则的混合型燃料电池汽车能量管理策略[J]. 青岛大学学报, 2023, 38(3):75-80.
|
|
|
|
| [12] |
|
| [13] |
丁阿鑫, 张晨阳, 沈英. 燃料电池汽车改进型状态机能量管理策略研究[J]. 机械制造与自动化, 2021, 50(2):181-204.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
张彬, 邹渊, 张旭东, 等. 基于TD3-PER的混合动力履带车辆能量管理[J]. 汽车工程, 2022, 44(9):1400-1409.
|
|
|
|
| [27] |
邹渊, 张彬, 张旭东, 等. 基于归一化优势函数的强化学习混合动力履带车辆能量管理[J]. 兵工学报, 2021, 42(10):2159-2169.
|
|
|
|
| [28] |
|
| [1] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [2] | XIAN Sujie, WANG Kang, ZENG Xin, SONG Jie, WU Zhilin. An Impact Angle and Field of View Constraints Guidance Law Based on Deep Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240435-. |
| [3] | SUN Hao, LI Haiqing, LIANG Yan, MA Chaoxiong, WU Han. Dynamic Penetration Decision of Loitering Munition Group Based on Knowledge-assisted Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(9): 3161-3176. |
| [4] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 2024, 45(12): 4372-4382. |
| [5] | FU Yanfang, LEI Kailin, WEI Jianing, CAO Zijian, YANG Bo, WANG Wei, SUN Zelong, LI Qinjie. A Hierarchical Multi-Agent Collaborative Decision-making Method Based on the Actor-critic Framework [J]. Acta Armamentarii, 2024, 45(10): 3385-3396. |
| [6] | CAO Zijian, SUN Zelong, YAN Guochuang, FU Yanfang, YANG Bo, LI Qinjie, LEI Kailin, GAO Linghang. Simulation of Reinforcement Learning-based UAV Swarm Adversarial Strategy Deduction [J]. Acta Armamentarii, 2023, 44(S2): 126-134. |
| [7] | HUANG Da-shan, ZHANG Jin-qiu, LIU Yi-le, ZHANG Jian. Research on Sliding Mode Control and Energy Management Strategy of Energy-regenerative Suspension System of Vehicle [J]. Acta Armamentarii, 2016, 37(12): 2185-2195. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||