
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (8): 240751-.doi: 10.12382/bgxb.2024.0751
Previous Articles Next Articles
ZHOU Le1,2, YIN Qiaozhi1,2,3, ZHONG Peilin1,2, WEI Xiaohui1,2,4,*( ), NIE Hong1,2,3
), NIE Hong1,2,3
Received:2024-08-30
Online:2025-08-28
Contact:
WEI Xiaohui
CLC Number:
ZHOU Le, YIN Qiaozhi, ZHONG Peilin, WEI Xiaohui, NIE Hong. Autonomous UAV Location Selection Technique Based on Data Fusion[J]. Acta Armamentarii, 2025, 46(8): 240751-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Phased UAV landing location selection framework
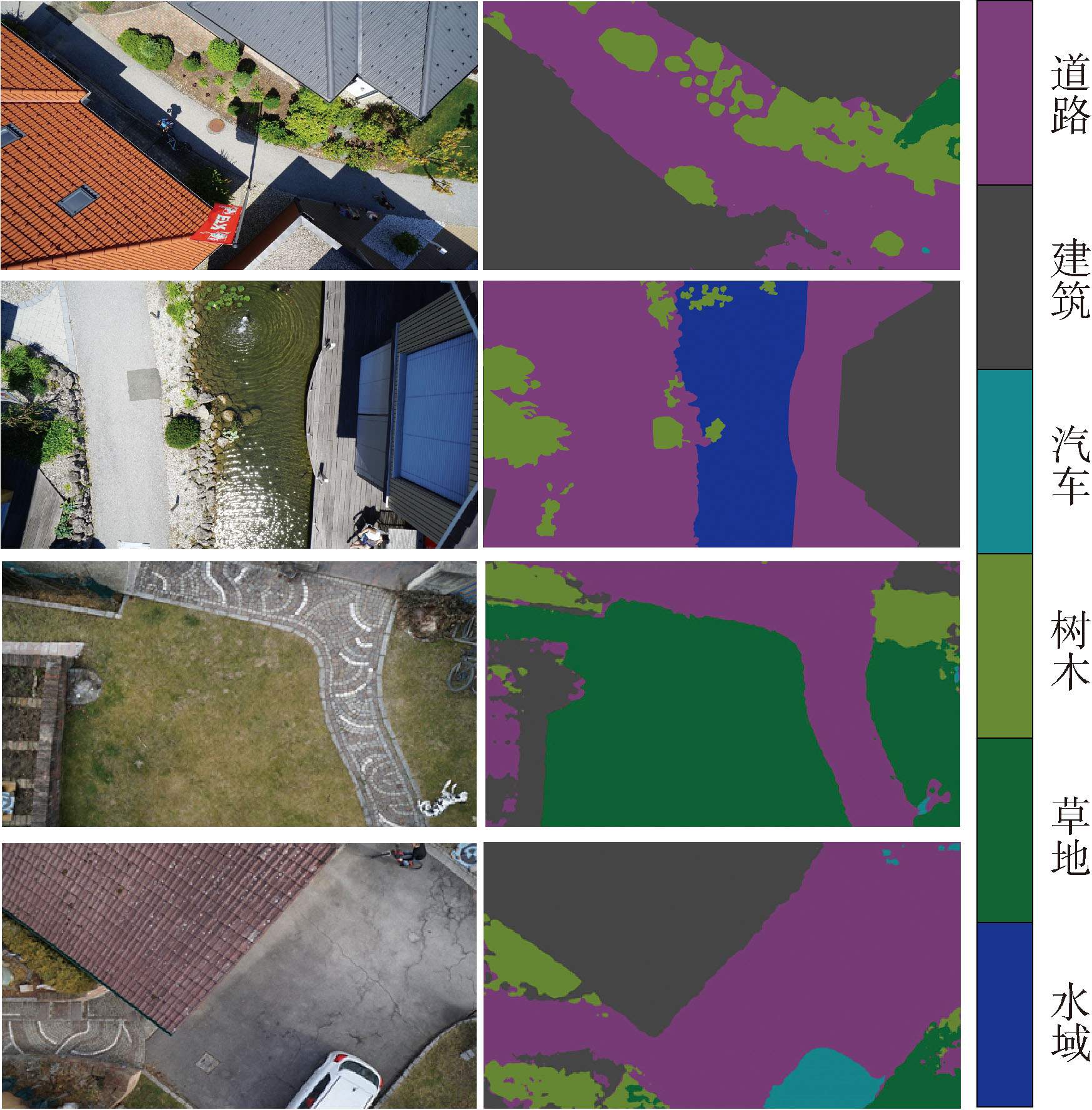
Fig.2 Visualization results of the model(left :test images,right:predicted results)

Fig.3 Flowchart of image-based landing point search

Fig.4 Construction of terrain cost map

Fig.5 Outdoor simulation environment
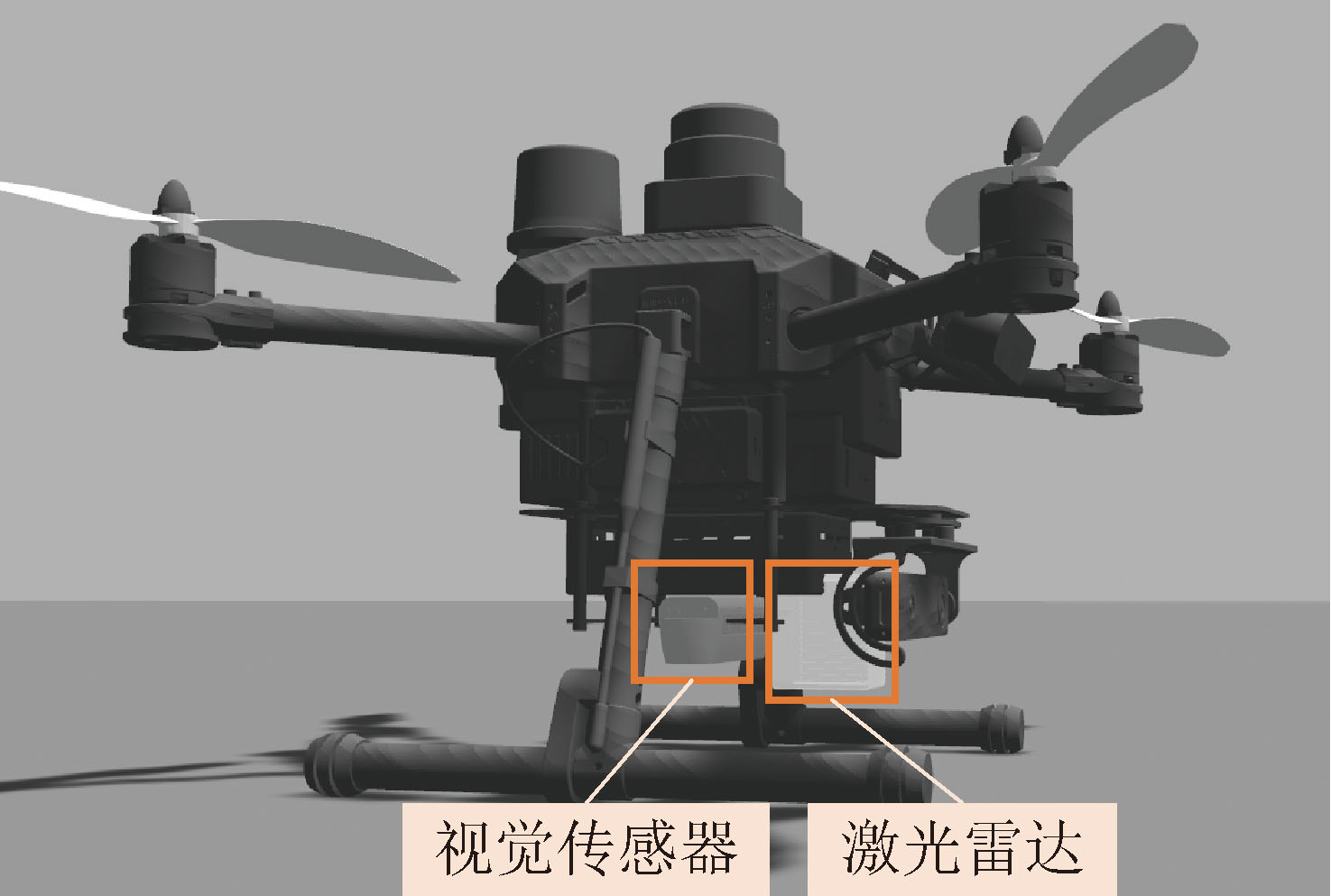
Fig.6 UAV model with sensors
| 参数 | 数值 |
|---|---|
| 焦距/pixel | 639.997649 |
| 视场角/(°) | 69×42 |
| 分辨率 | 640×480 |
| 畸变系数 | [0,0,0,0,0] |
| 帧率/(帧·s-1) | 30 |
Table 1 Performance parameters of vision sensor in simulation
| 参数 | 数值 |
|---|---|
| 焦距/pixel | 639.997649 |
| 视场角/(°) | 69×42 |
| 分辨率 | 640×480 |
| 畸变系数 | [0,0,0,0,0] |
| 帧率/(帧·s-1) | 30 |
| 参数 | 取值 |
|---|---|
| 扫描模式 | 非重复式扫描 |
| 测量范围/m | 190 |
| 视场角/(°) | 70.4×77.2 |
| 输出/(点·次-1) | 24000 |
| 更新频率/Hz | 10 |
Table 2 Performance parameters of LiDAR in simulation
| 参数 | 取值 |
|---|---|
| 扫描模式 | 非重复式扫描 |
| 测量范围/m | 190 |
| 视场角/(°) | 70.4×77.2 |
| 输出/(点·次-1) | 24000 |
| 更新频率/Hz | 10 |

Fig.7 Upper-air image

Fig.8 Upper-air semantic image

Fig.9 Binary image

Fig.10 Preliminary result of location selection
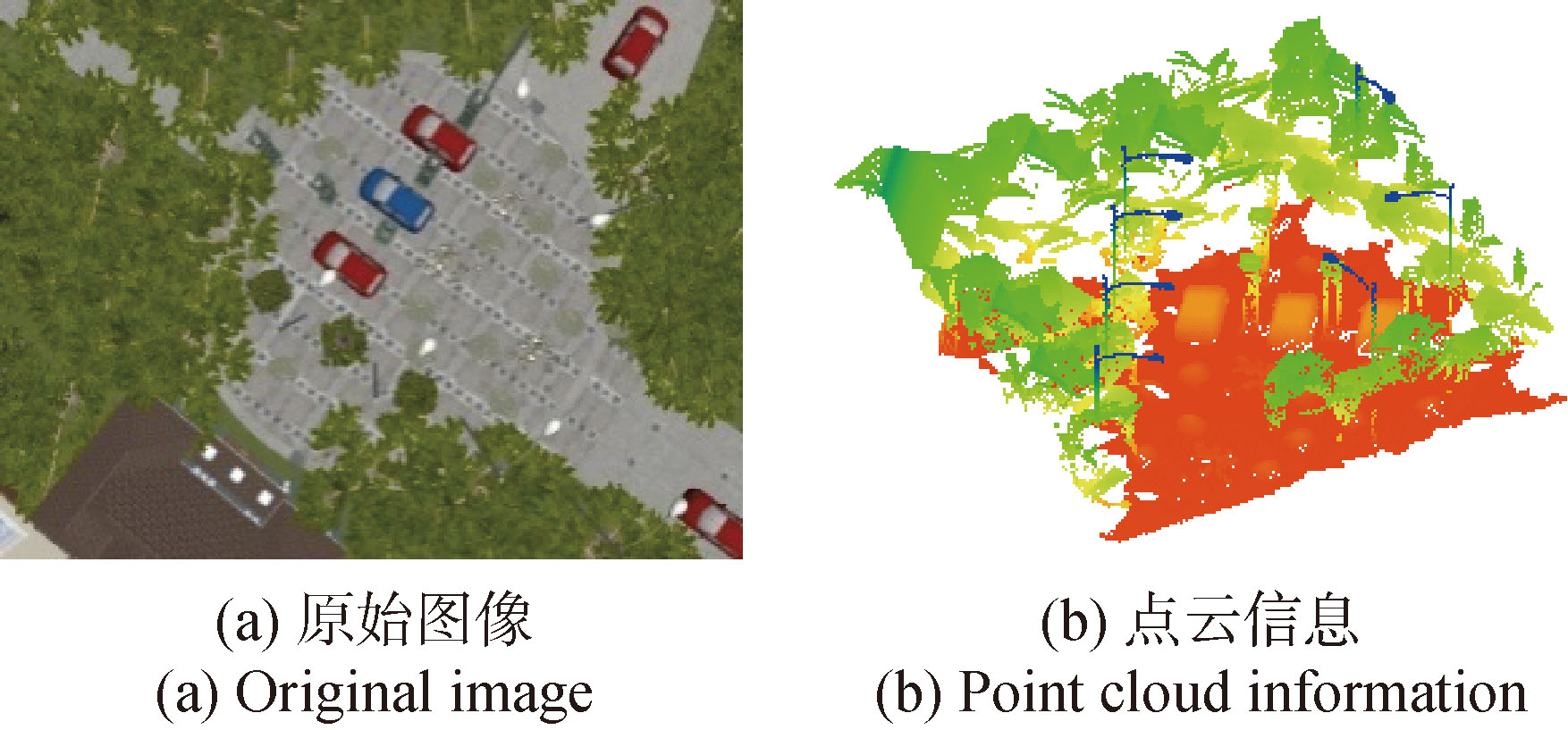
Fig.11 The information collected at low altitude
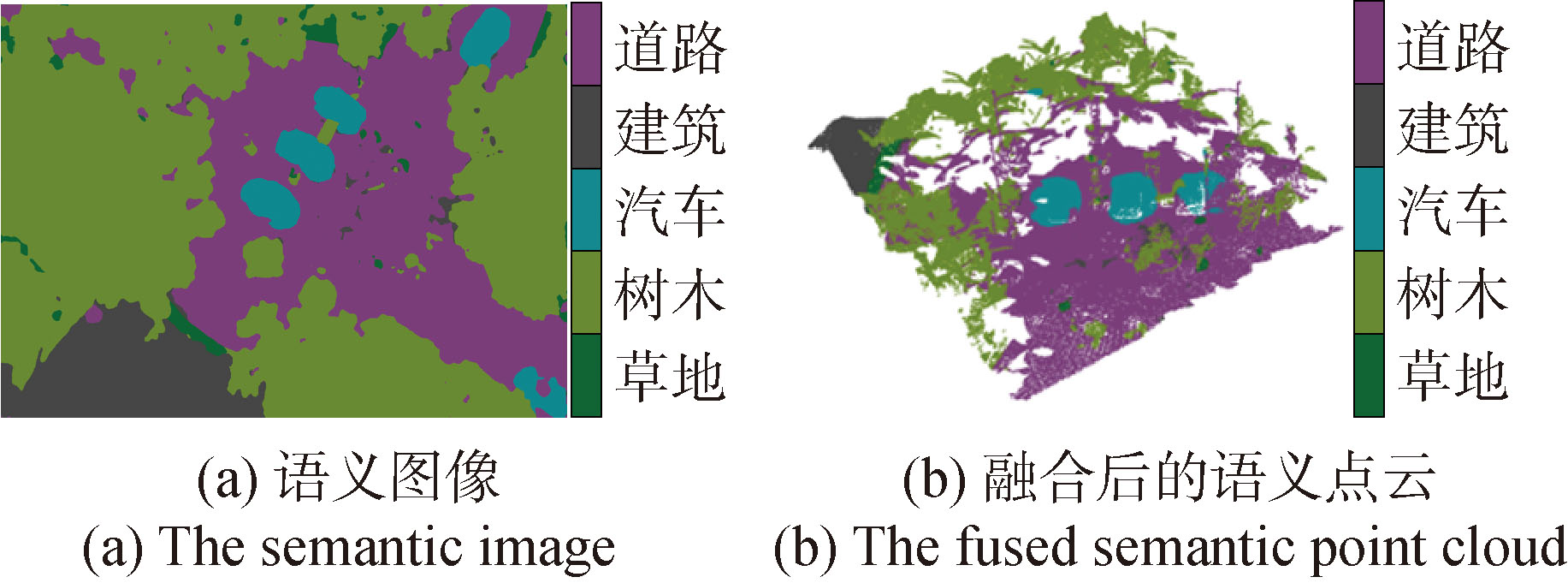
Fig.12 The semantic information at low altitude
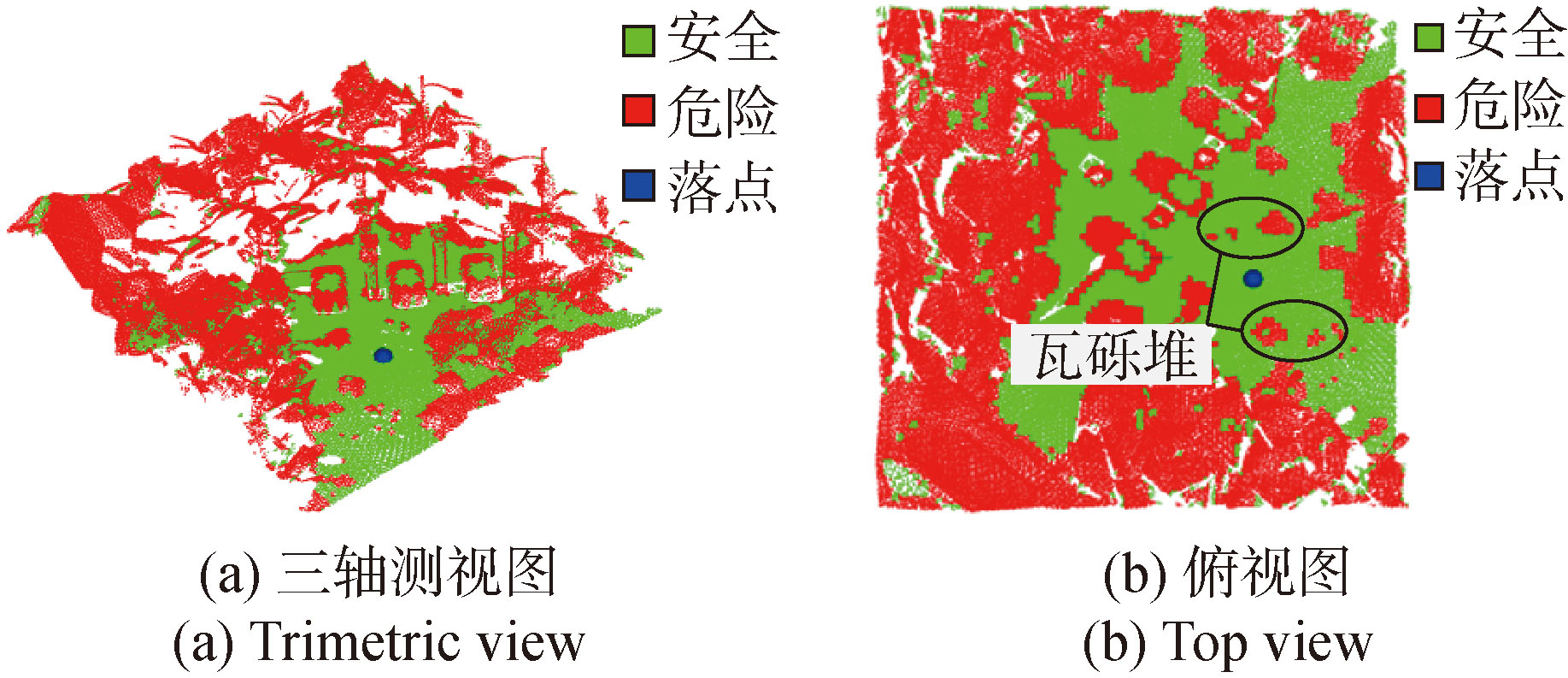
Fig.13 The best landing point screened based on plane fitting

Fig.14 The schematic diagrams of the elevation values of point cloud and the terrain parameter grid
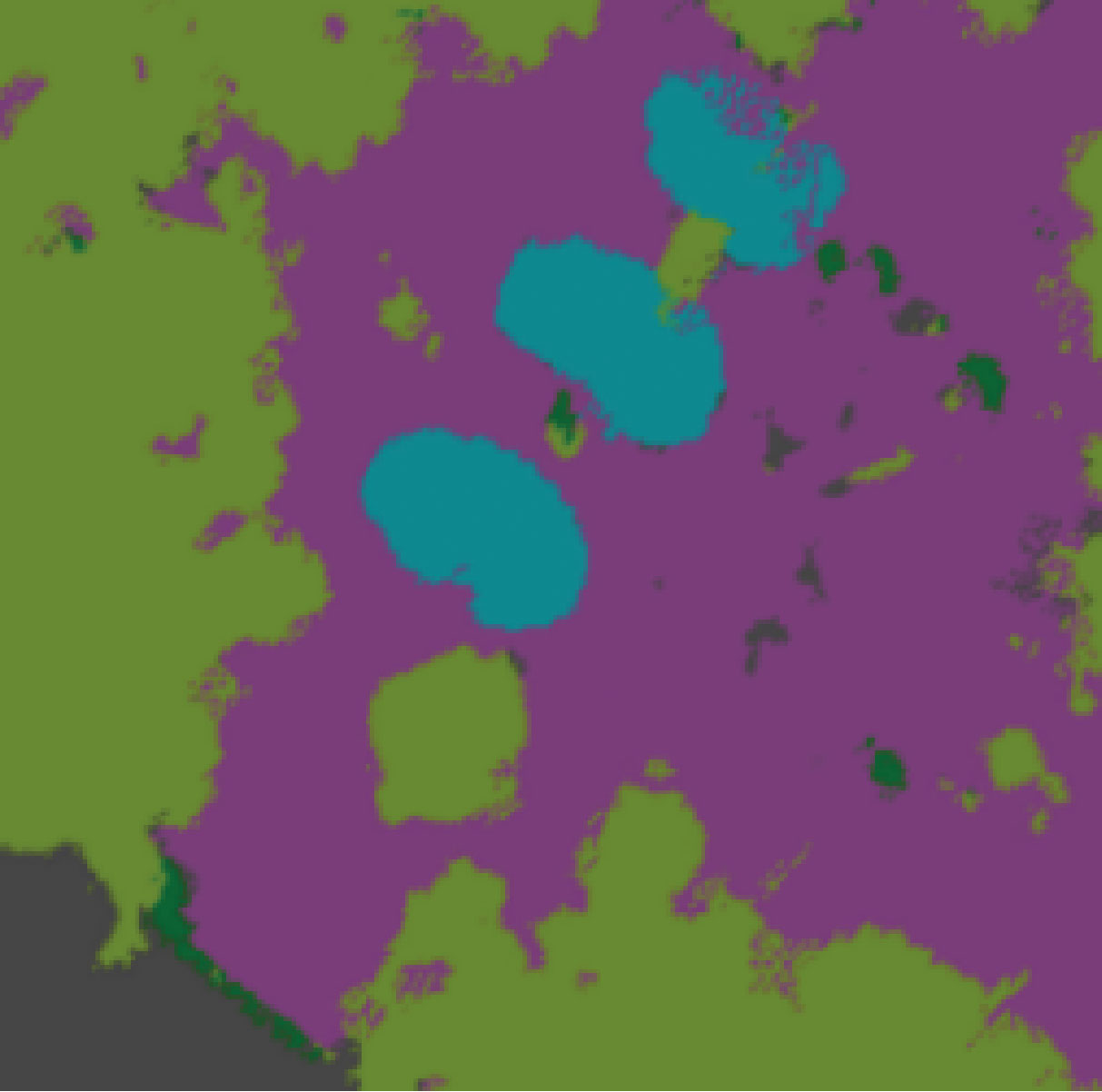
Fig.15 Point cloud semantic grid diagram

Fig.16 Terrain cost map
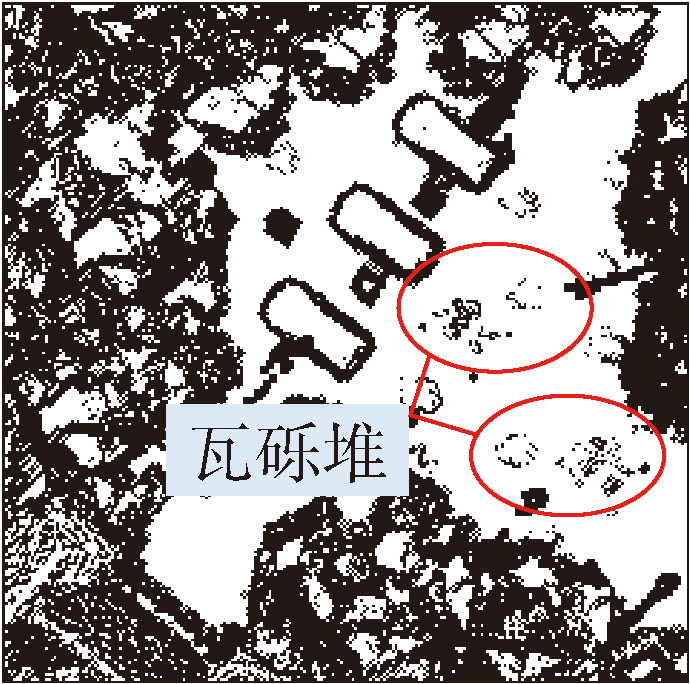
Fig.17 Safe-hazard grid map
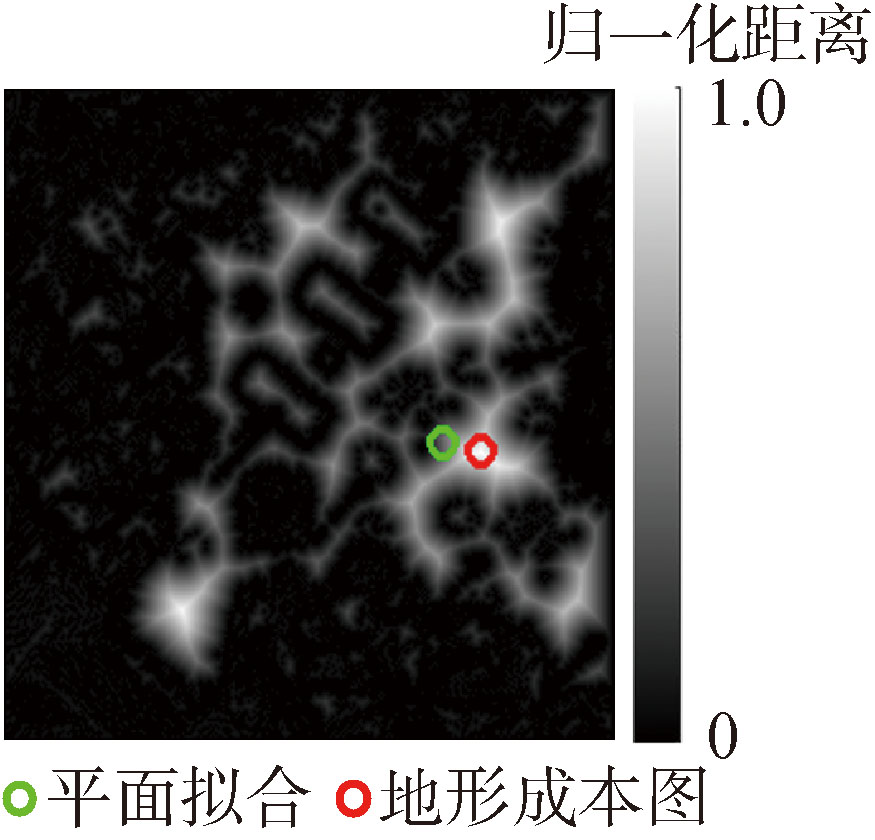
Fig.18 Safety distance map
| 参数 | 平面拟合 | 地形成本图 |
|---|---|---|
| 点云数量/个 | 225881 | 225881 |
| 最佳点坐标/m | (5.23,-1.07,-18.24) | (6.75,-1.35,-18.24) |
| 运行时间/s | 1.1787 | 0.1437 |
Table 3 Comparison of simulated results in the fine landing point search stage
| 参数 | 平面拟合 | 地形成本图 |
|---|---|---|
| 点云数量/个 | 225881 | 225881 |
| 最佳点坐标/m | (5.23,-1.07,-18.24) | (6.75,-1.35,-18.24) |
| 运行时间/s | 1.1787 | 0.1437 |
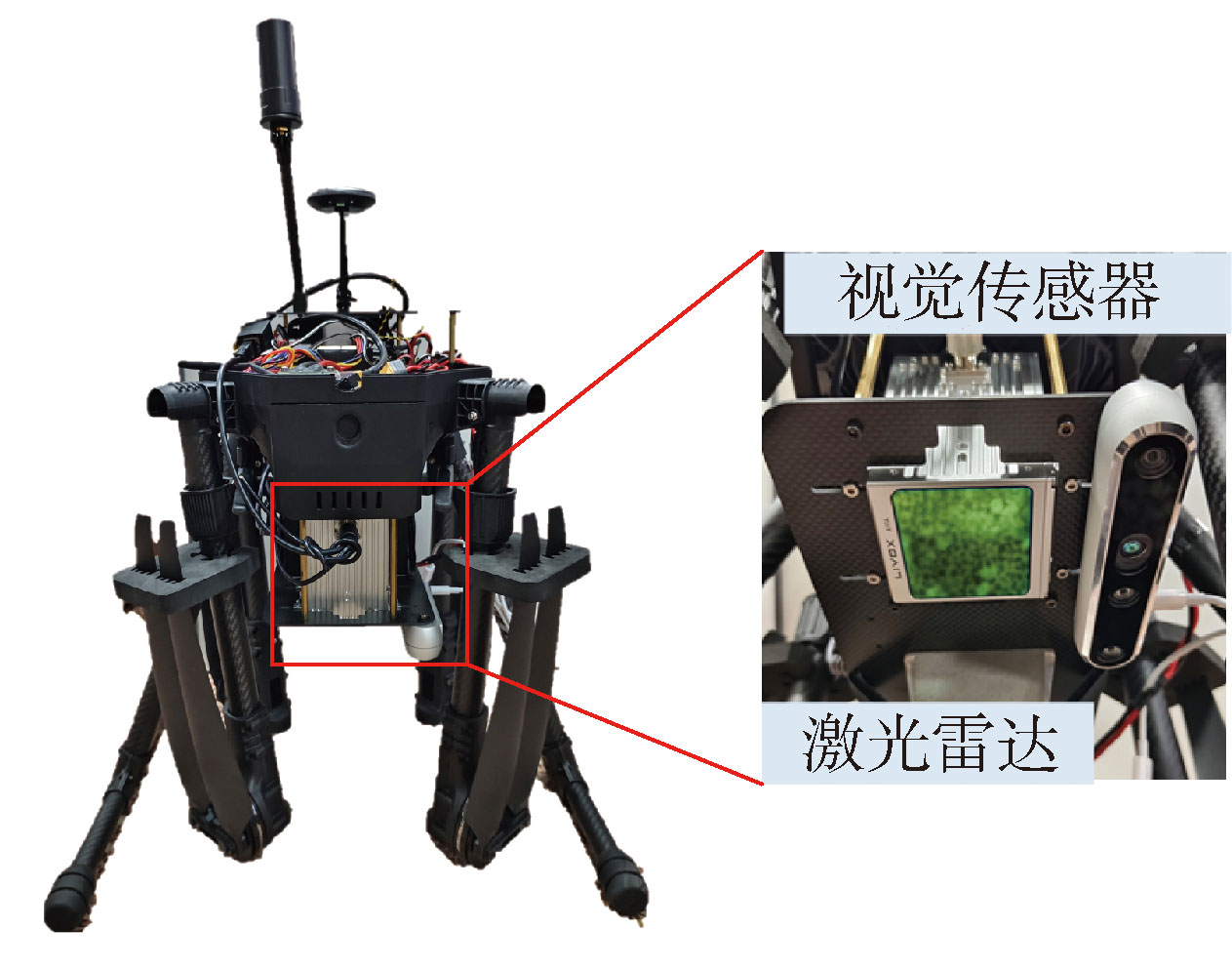
Fig.19 A real UVA with a location selection system
| 设备 | 类型 | 参数 |
|---|---|---|
| 视觉传感器 | Realsense D455 | RGB摄像头 分辨率:640×480 视场角:90° × 65° 帧率:30帧/s |
| 激光雷达 | Livox avia | 量程:190m @10%反射率 扫描模式:非重复扫描 视场角:70.4°×77.2° 点云输出:240000点/s |
Table 4 Detailed information of some sensors
| 设备 | 类型 | 参数 |
|---|---|---|
| 视觉传感器 | Realsense D455 | RGB摄像头 分辨率:640×480 视场角:90° × 65° 帧率:30帧/s |
| 激光雷达 | Livox avia | 量程:190m @10%反射率 扫描模式:非重复扫描 视场角:70.4°×77.2° 点云输出:240000点/s |
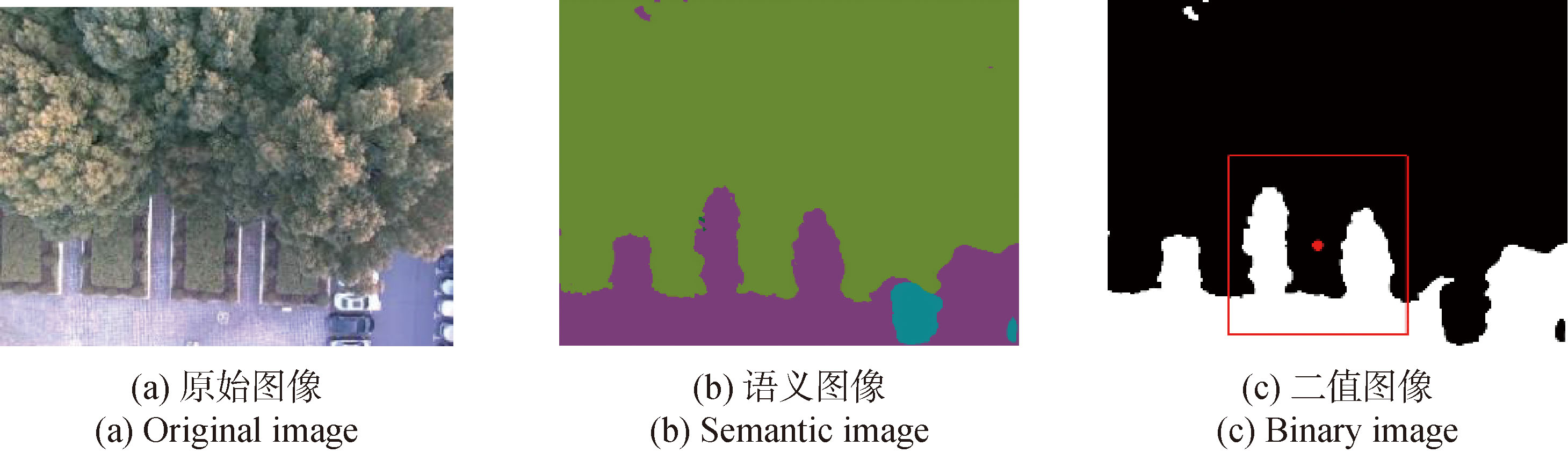
Fig.20 Scenario 1 Rough landing point search
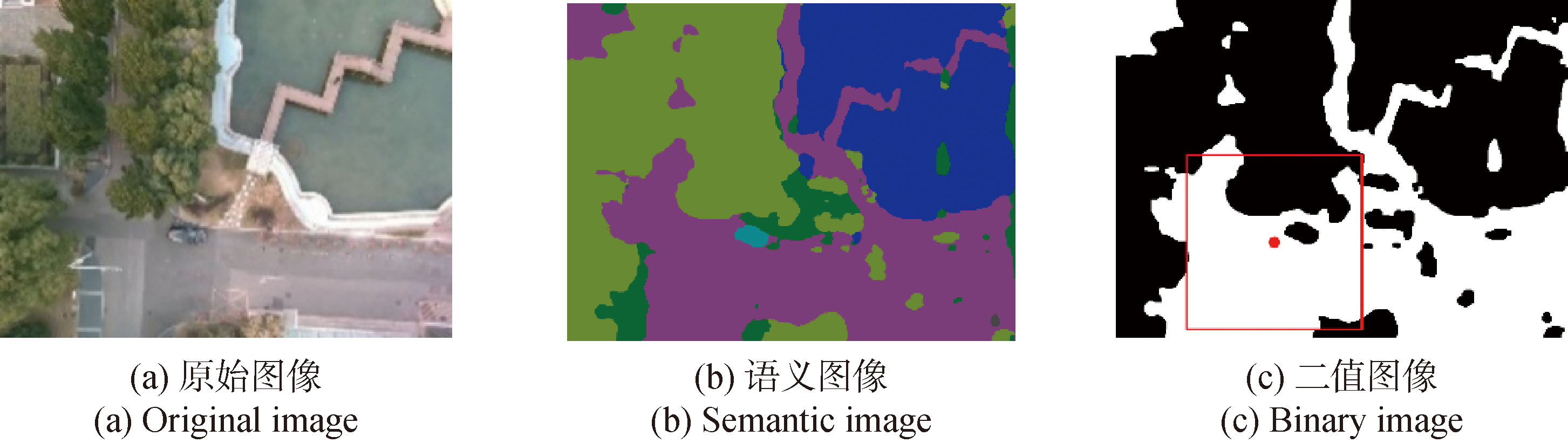
Fig.21 Scenario 2 Rough landing point search
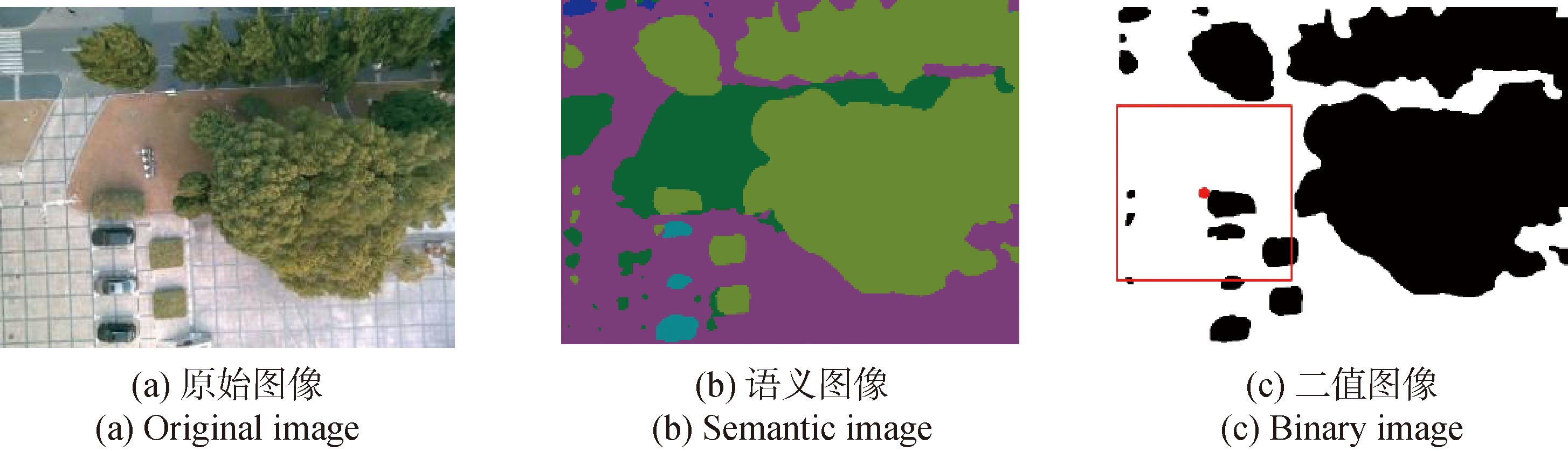
Fig.22 Scenario 3 Rough landing point search
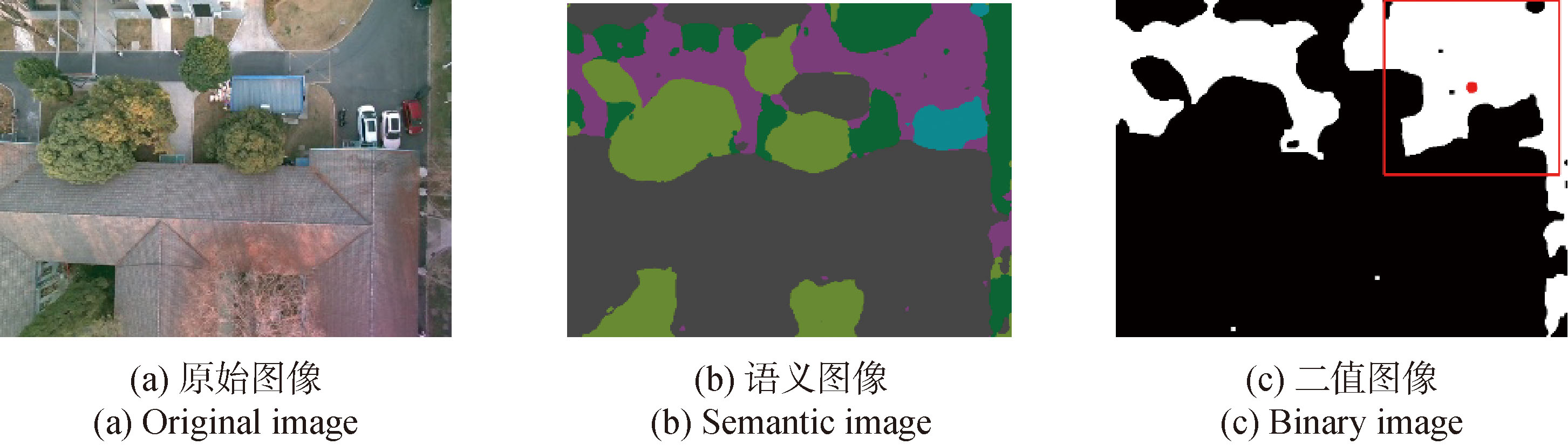
Fig.23 Scenario 4 Rough landing point search
| 场景 | 图像尺寸/pixel | 像素坐标/pixel | 时间/s |
|---|---|---|---|
| 场景1 | 640×480 | (284,344) | 0.077 |
| 场景2 | 640×480 | (224,344) | 0.071 |
| 场景3 | 640×480 | (124,264) | 0.073 |
| 场景4 | 640×480 | (504,124) | 0.074 |
Table 5 Real test results in the rough landing point search phase
| 场景 | 图像尺寸/pixel | 像素坐标/pixel | 时间/s |
|---|---|---|---|
| 场景1 | 640×480 | (284,344) | 0.077 |
| 场景2 | 640×480 | (224,344) | 0.071 |
| 场景3 | 640×480 | (124,264) | 0.073 |
| 场景4 | 640×480 | (504,124) | 0.074 |

Fig.24 Scenario 1 Fine landing point search
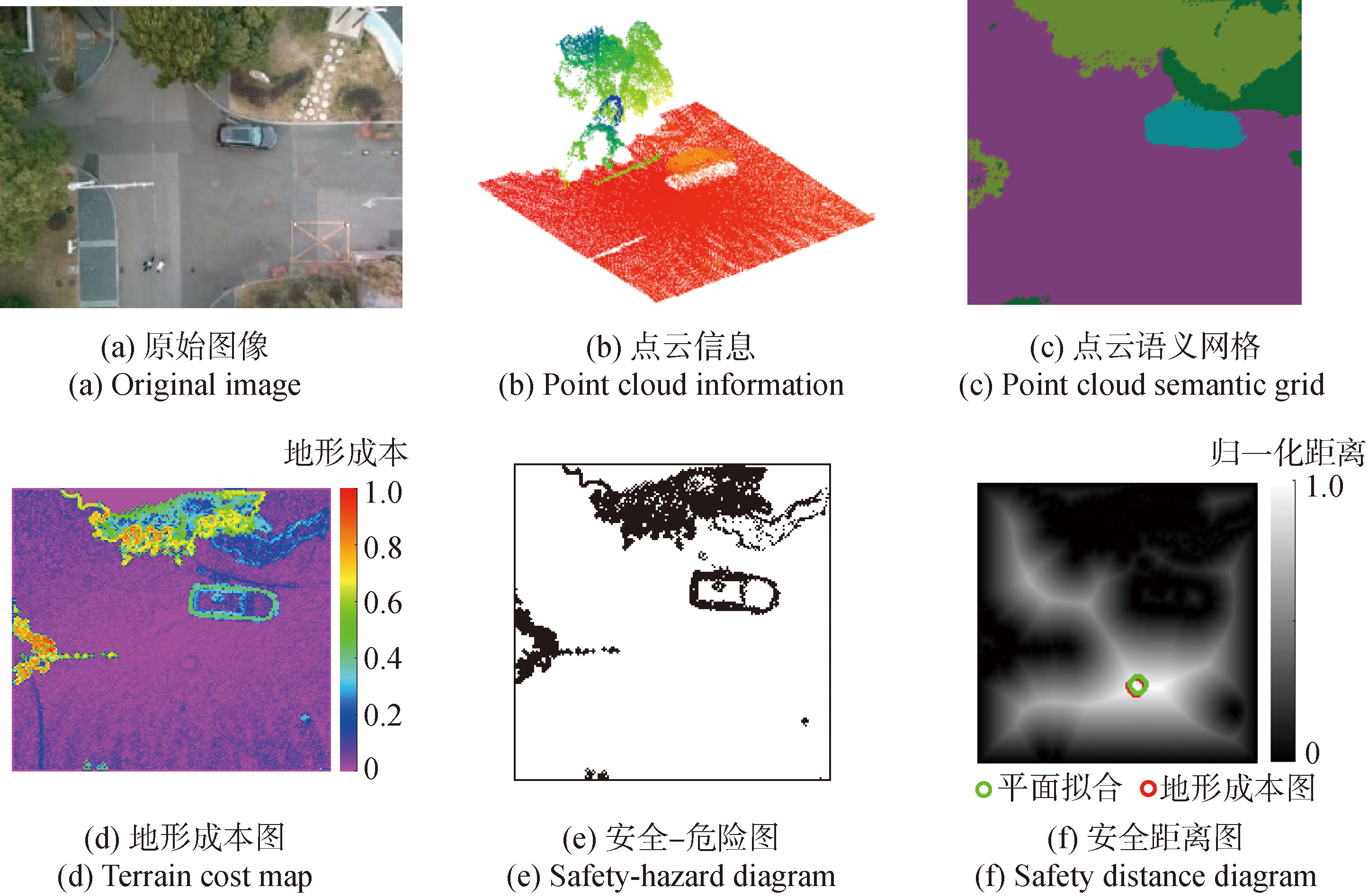
Fig.25 Scenario 2 Fine landing point search
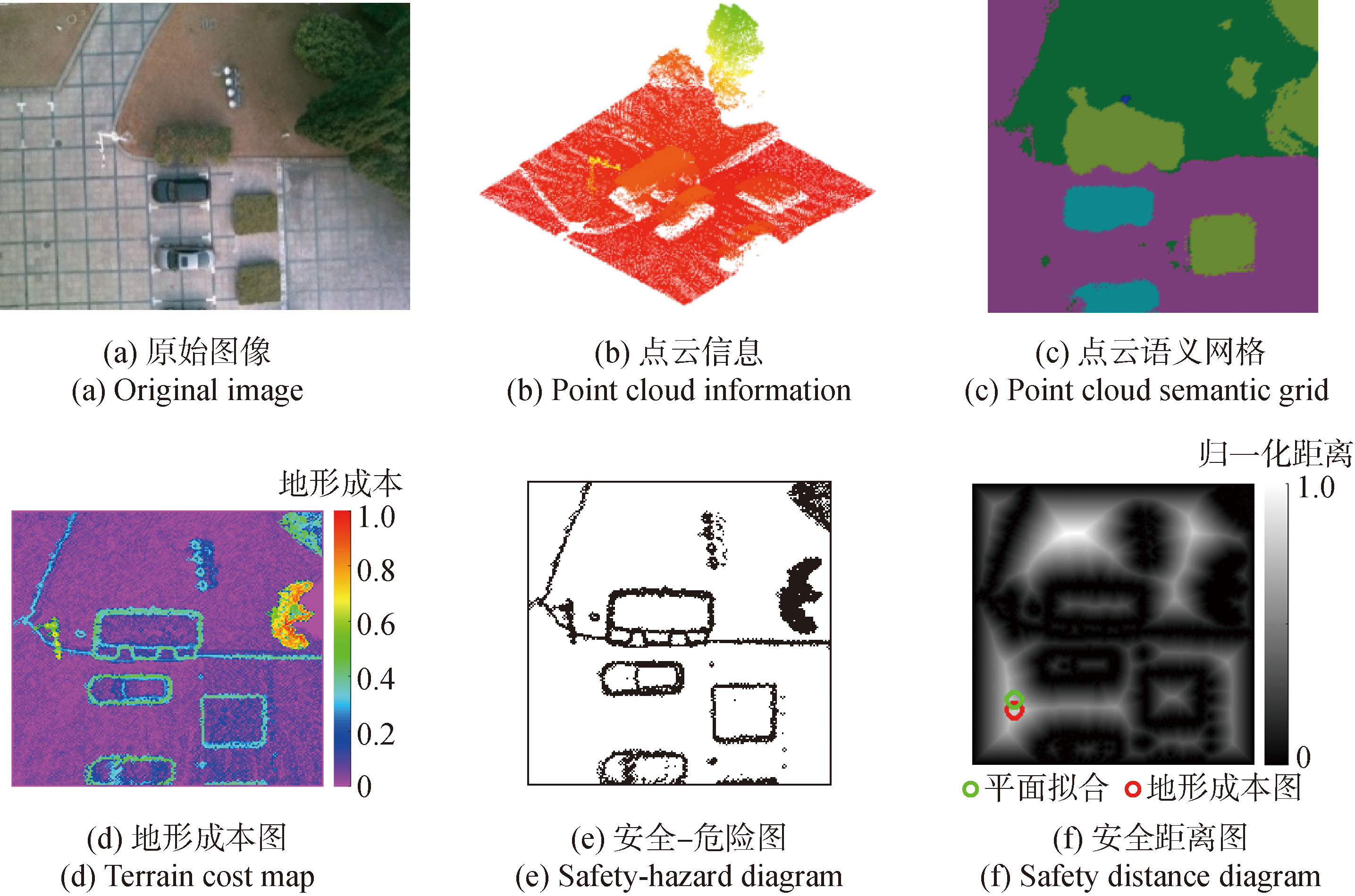
Fig.26 Scenario 3 Fine landing point search

Fig.27 Scenario 4 Fine landing point search
| 场景 | 方式 | 点云坐 标/m | 时间/ s | 时间 对比/% |
|---|---|---|---|---|
| 场景1 (105 394个点) | 平面拟合 | (4.36,-6.15, -22.26) | 0.491 | 72.30 |
| 地形成本图 | (4.25,-6.55, -22.26) | 0.136 | ||
| 场景2 (84 640个点) | 平面拟合 | (1.26,-3.74, -19.19) | 0.465 | 72.36 |
| 地形成本图 | (1.15,-3.85, -19.21) | 0.129 | ||
| 场景3 (89798个点) | 平面拟合 | (-6.43,-4.94, -20.52) | 0.447 | 73.60 |
| 地形成本图 | (-6.45,-5.65, -20.54) | 0.118 | ||
| 场景4 (84416个点) | 平面拟合 | (4.48,1.96, -19.51) | 0.419 | 75.42 |
| 地形成本图 | (4.25,2.75, -19.52) | 0.103 |
Table 6 Comparison of real test results in the fine landing point search phase
| 场景 | 方式 | 点云坐 标/m | 时间/ s | 时间 对比/% |
|---|---|---|---|---|
| 场景1 (105 394个点) | 平面拟合 | (4.36,-6.15, -22.26) | 0.491 | 72.30 |
| 地形成本图 | (4.25,-6.55, -22.26) | 0.136 | ||
| 场景2 (84 640个点) | 平面拟合 | (1.26,-3.74, -19.19) | 0.465 | 72.36 |
| 地形成本图 | (1.15,-3.85, -19.21) | 0.129 | ||
| 场景3 (89798个点) | 平面拟合 | (-6.43,-4.94, -20.52) | 0.447 | 73.60 |
| 地形成本图 | (-6.45,-5.65, -20.54) | 0.118 | ||
| 场景4 (84416个点) | 平面拟合 | (4.48,1.96, -19.51) | 0.419 | 75.42 |
| 地形成本图 | (4.25,2.75, -19.52) | 0.103 |
| [1] |
刘闯, 鱼小军, 张婷, 等. 无人集群装备仿真试验关键技术现状及趋势[J]. 航空学报, 2022, 43(增刊1):726919.
|
|
doi: 10.7527/S1000-6893.2022.26919 |
|
| [2] |
|
| [3] |
孙浩, 尹乔之, 魏小辉, 等. 新型自适应起落架的单支腿落震性能研究[J]. 北京航空航天大学学报, 2023, 49(4):990-998.
|
|
|
|
| [4] |
王盼, 吴昊, 梁宇, 等. 轻型无人机起落架设计与强度分析[J]. 兵工学报, 2022, 43(增刊1):140-145.
|
|
|
|
| [5] |
|
| [6] |
马宁, 曹云峰. 面向无人机自主着陆的视觉感知与位姿估计方法综述[J]. 自动化学报, 2024, 50(7):1284-1304.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
袁俊. 基于无人机平台的目标跟踪和着陆位姿估计[D]. 哈尔滨: 哈尔滨工业大学, 2020.
|
|
|
|
| [10] |
黄建宇, 屈玉福, 姜吉祥. 无人飞行器自主降落区识别方法研究[J]. 液晶与显示, 2018, 33(3):238-244.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
刘飞, 单佳瑶, 熊彬宇, 等. 基于多传感器融合的无人机可降落区域识别方法研究[J]. 航空科学技术, 2022, 33(4):19-27.
|
|
|
|
| [18] |
张炯, 牛欢, 陈雪. 基于多传感器融合的无人机应急着陆功能研究[J]. 航空科学技术, 2022, 33(11):11-20.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
张泽旭, 王卫东, 崔平远, 等. 一种行星软着陆地形风险评估方法[J]. 哈尔滨工业大学学报, 2011, 43(5):25-29.
|
|
|
|
| [24] |
|
| [25] |
doi: 10.1016/j.isatra.2022.04.005 pmid: 35697539 |
| [26] |
|
| [27] |
|
| [28] |
闫璐. 基于机载激光雷达的旋翼无人机自主择址方法研究[D]. 天津: 天津大学, 2020.
|
|
|
|
| [29] |
|
| [30] |
|
| [1] | ZHANG Yue, ZHANG Ning, XU Xiping, PAN Yue. UAV Trajectory Planning under Complex Constraints Based on GOTDBO Algorithm [J]. Acta Armamentarii, 2025, 46(8): 240997-. |
| [2] | LI Junhui, WANG Wei, WANG Yuchen, JI Yi. Unmanned Aerial Vehicle Formation Control Based on Prescribed-time Consensus Theory [J]. Acta Armamentarii, 2025, 46(8): 240863-. |
| [3] | SHEN Ying, ZHANG Shuo, WANG Shu, SU Yun, XUE Fang, HUANG Feng. A Method for Detecting the Camouflaged Small Target in Complex Scene Using Airborne Polarization Remote Sensing [J]. Acta Armamentarii, 2025, 46(7): 240797-. |
| [4] | XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240710-. |
| [5] | XU Yang, WEI Chao, FENG Fuyong, HU Leyun. Autonomous Landing of UAVs based on Spatio-temporal Decomposition Planning [J]. Acta Armamentarii, 2025, 46(7): 240653-. |
| [6] | ZHAI Weiguang, WANG Feng, MA Xingyu, ZHAO Wei, MENG Pengshuai. YSG-SLAM:a Real-time Semantic RGB-D SLAM Based on YOLACT in Dynamic Scene [J]. Acta Armamentarii, 2025, 46(6): 240443-. |
| [7] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [8] | YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning [J]. Acta Armamentarii, 2025, 46(5): 240549-. |
| [9] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [10] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [11] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [12] | ZENG Zhaoyang, PENG Wensheng, LI Yunkai, XU Ming. Connotation,Development and Challenges of Reliability Technology of Intelligent UAV Swarm [J]. Acta Armamentarii, 2025, 46(3): 240322-. |
| [13] | LIU Cong, LI Baiqing, ZHANG Zongwei, SHAN Zezhong. Investigation of Multi-dimensional Aerodynamic Characteristics of UAV Rotor Subjected to Horizontal Inflow [J]. Acta Armamentarii, 2025, 46(3): 240316-. |
| [14] | ZHANG Fenglin, DONG Yihao, XIN Jianshe, GUO Liping, GU Xuechen, QU Jiaqi. Parameter Selection and Optimization Algorithm for Low-overload Compressed Air Launch of Small Unmanned Aerial Vehicles Based on Particle Swarm Optimization [J]. Acta Armamentarii, 2025, 46(2): 240014-. |
| [15] | ZHANG Xinze, XIAO Haijian, LIU Xinglong, XING Kongrui, LU Xiang. Design and Realization of a Ducted Fan Water-air Amphibious UAV [J]. Acta Armamentarii, 2025, 46(1): 231172-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||