
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (S2): 162-169.doi: 10.12382/bgxb.2024.0877
Previous Articles Next Articles
DU Yunsheng, WANG Wenshuo*( ), WEI Yuan, CHEN Huiyan
), WEI Yuan, CHEN Huiyan
Received:2024-09-21
Online:2024-12-12
Contact:
WANG Wenshuo
DU Yunsheng, WANG Wenshuo, WEI Yuan, CHEN Huiyan. Modeling and Prediction of Driver’s Steering Control Behavior for Stepless Steering Tracked Vehicle[J]. Acta Armamentarii, 2024, 45(S2): 162-169.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Stepless steering tracked vehicle

Fig.2 Transmission system of continuously stepless steering tracked vehicles

Fig.3 Connection diagram of data acquisition system

Fig.4 Arrangement of driver control action vision sensor
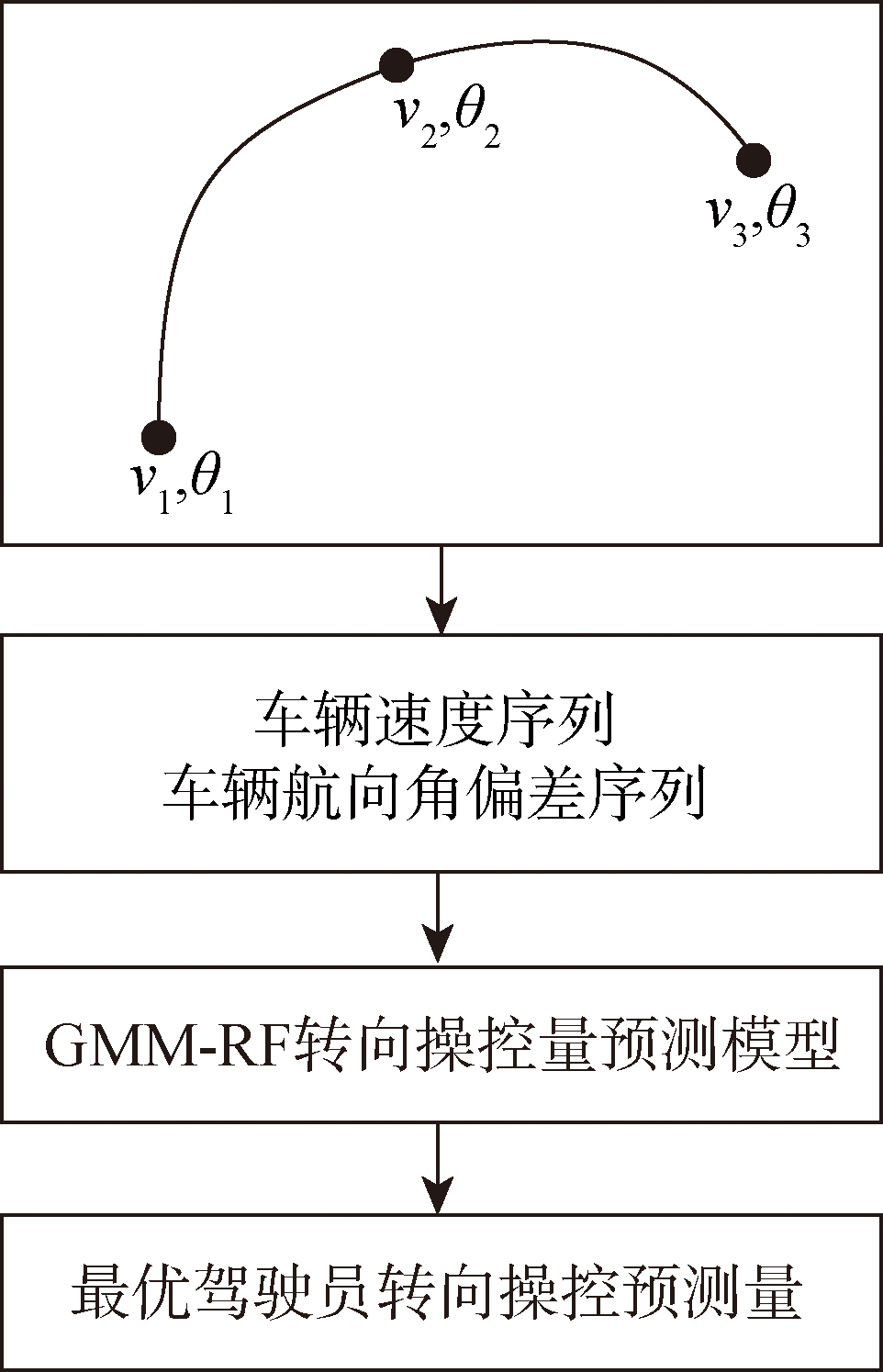
Fig.5 Driver steering behavior prediction model

Fig.6 Driver steering control device
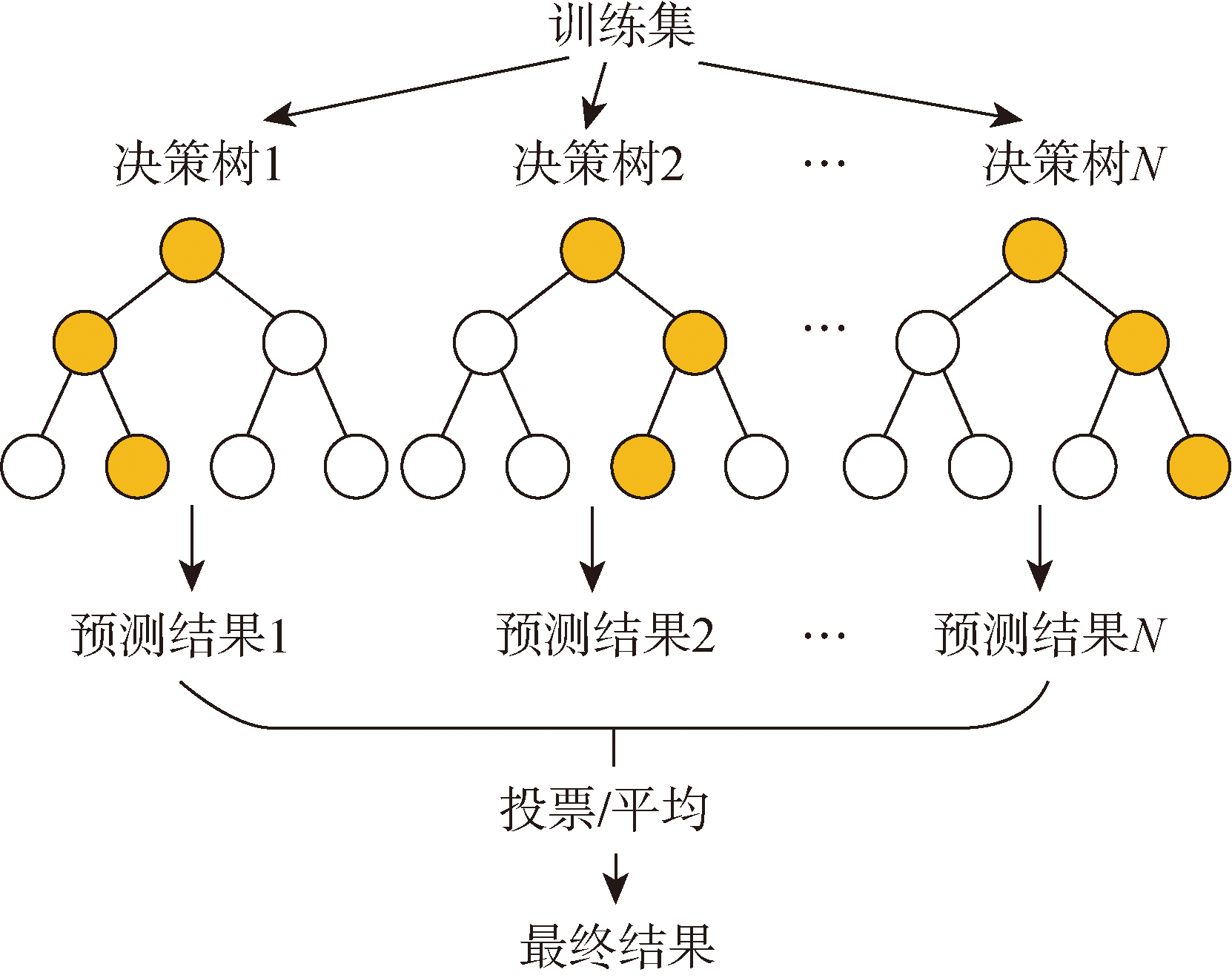
Fig.7 Random forest algorithm

Fig.8 Experimental site
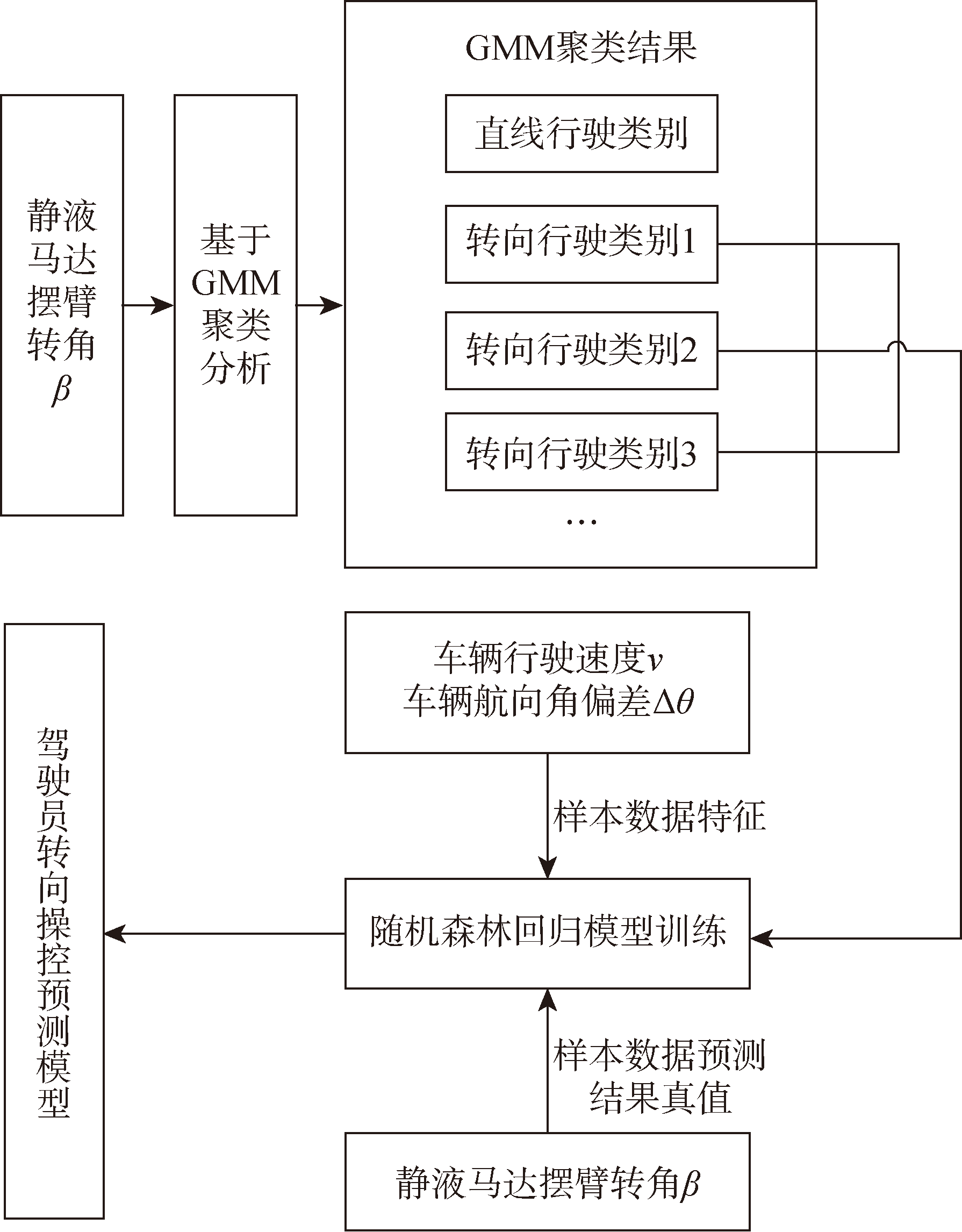
Fig.9 Training process of driver steering prediction model

Fig.10 The corresponding relationship between the turning angle data of hydrostatic motor swinging arm and the steering wheel
| 转向类别 | 均值/(°) | 标准差/(°) |
|---|---|---|
| 直线行驶 | 18.51 | 0.41 |
| 小曲率转向 | 16.61 | 1.33 |
| 中等曲率转向 | 12.46 | 1.20 |
| 大曲率转向 | 7.76 | 4.38 |
Table 1 Clustering results of left-turn driving
| 转向类别 | 均值/(°) | 标准差/(°) |
|---|---|---|
| 直线行驶 | 18.51 | 0.41 |
| 小曲率转向 | 16.61 | 1.33 |
| 中等曲率转向 | 12.46 | 1.20 |
| 大曲率转向 | 7.76 | 4.38 |
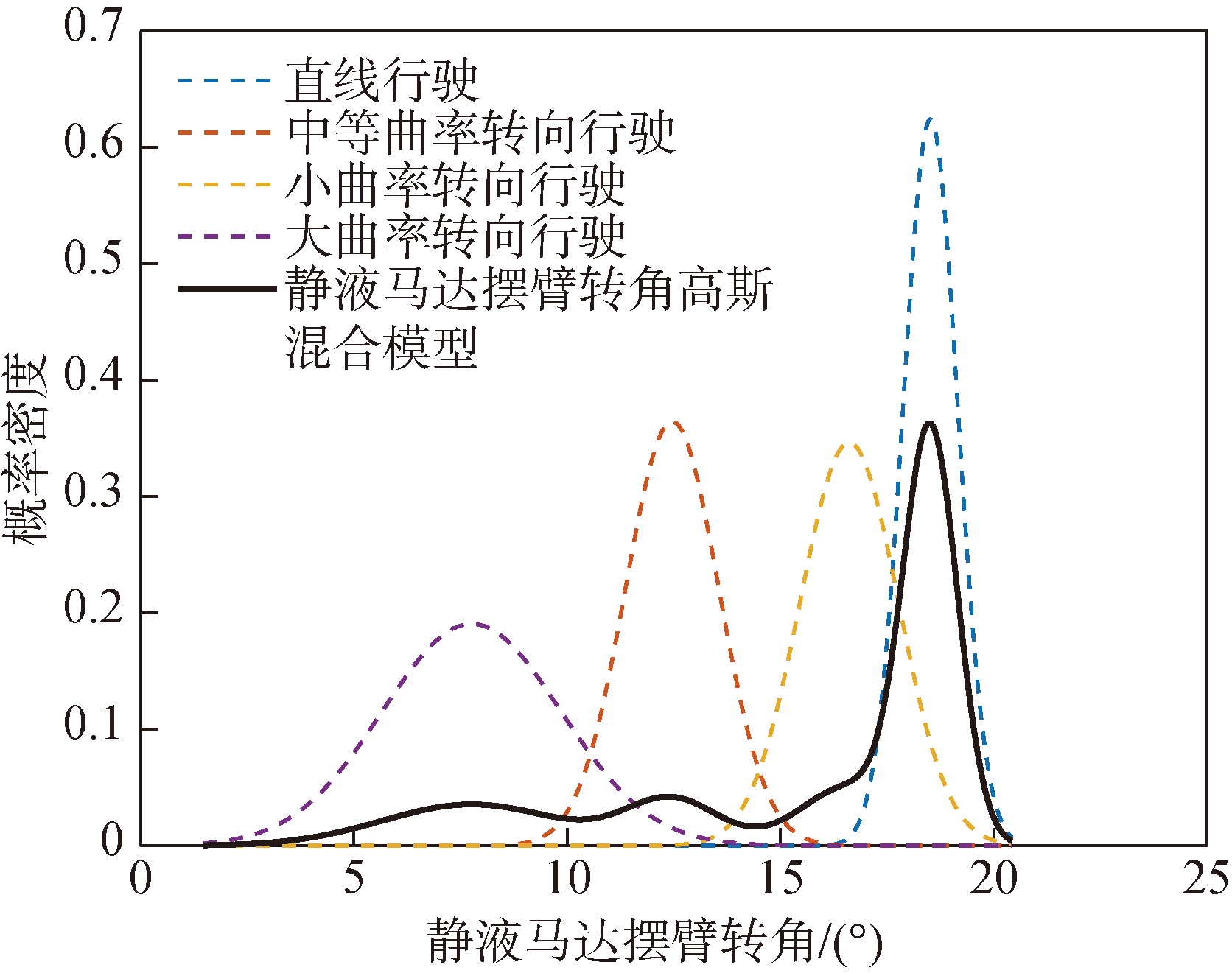
Fig.11 Probability density of left turning

Fig.12 Results of steering control prediction
| [1] |
李林林, 张承龙, 卓志敏. 智能无人作战系统发展及关键技术[J]. 现代防御技术, 2020, 48(3):37-43.
doi: 10.3969/j.issn.1009-086x.2020.03.006 |
|
|
|
| [2] |
|
| [3] |
|
| [4] |
王博洋, 龚建伟, 高天云, 等. 基于高斯混合-隐马尔可夫模型的速差转向履带车辆横向控制驾驶员模型[J]. 兵工学报, 2017, 38(12):2301-2308.
doi: 10.3969/j.issn.1000-1093.2017.12.002 |
|
|
|
| [5] |
王博洋, 龚建伟, 熊光明, 等. 有级转向履带车辆的驾驶员操控行为模型[J]. 兵工学报, 2020, 41(12):2379-2388.
|
|
doi: 10.3969/j.issn.1000-1093.2020.12.002 |
|
| [6] |
刘庆霄, 唐泽月, 张超朋, 等. 基于高斯混合-隐半马尔可夫模型的双侧独立电驱动无人履带机动平台纵向决策方法[J]. 兵工学报, 2022, 43(8):1733-1743.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [1] | NIE Wei, HE Hongwen, LEI Qiangshun, WAN Yiqiang. Characteristic Analysis of Damping Valve in Hydro-pneumatic Suspension of Tracked Vehicle Based on Bonding-diagram [J]. Acta Armamentarii, 2024, 45(8): 2728-2736. |
| [2] | WU Rui, YU Huilong, DONG Haotian, XI Junqiang. Refined Dynamics Modeling and Simulation of Special Tracked Vehicles [J]. Acta Armamentarii, 2024, 45(5): 1384-1401. |
| [3] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [4] | YUAN Yi, GAI Jiangtao, ZENG Gen, ZHOU Guangming, LI Xunming, MA Changjun. Analysis and Experimental Verification of Yaw Motion Response Characteristics of High-speed Tracked Vehicle [J]. Acta Armamentarii, 2024, 45(4): 1094-1107. |
| [5] | LI Huanhuan, LIU Hui, GAI Jiangtao, LI Xunming. Steering Control of Dual-motor Coupling Drive Tracked Vehicle Based on PSO PID Parameter Optimization [J]. Acta Armamentarii, 2024, 45(3): 916-924. |
| [6] | WANG Xu, LI Rui, HUANG Ying, SHEN Jiwei, SHANG Xianhe. Construction of Driving Cycle for Military Tracked Vehicles Considering Road Features [J]. Acta Armamentarii, 2024, 45(3): 907-915. |
| [7] | LI Yaoheng, GAI Jiangtao, ZHANG Nan, CHENG Cheng, LI Cuifen, SHUAI Zhibin, DIAO Lijun. Stability Analysis and Optimization Strategy of Electric System for Electric Tracked Vehicles [J]. Acta Armamentarii, 2024, 45(10): 3397-3414. |
| [8] | LIU Jia, LIU Hai’ou, CHEN Huiyan, MAO Feihong. Road Types Identification Method of Unmanned Tracked Vehicles Based on Fusion Features [J]. Acta Armamentarii, 2023, 44(5): 1267-1276. |
| [9] | LU Jiaxing, LIU Haiou, GUAN Haijie, LI Derun, CHEN Huiyan, LIU Longlong. Trajectory Tracking Control of Unmanned Tracked Vehicles Based on Adaptive Dual-Parameter Optimization [J]. Acta Armamentarii, 2023, 44(4): 960-971. |
| [10] | REN Jihuan, WU Xiang, BO Yuming, WU Panlong, HE Shan. Ballistic Trajectory Prediction Based on Context-enhanced Long Short-Term Memory Network [J]. Acta Armamentarii, 2023, 44(2): 462-471. |
| [11] | SHENG Hui, XIANG Changle, GAI Jiangtao, YUAN Yi, JIAN Hongchao, ZHANG Nan. Vehicle Safety Control of Tracked Vehicle Driven by Two-sided Motor Coupling under the Failure Mode of One-sided Motor [J]. Acta Armamentarii, 2023, 44(11): 3498-3507. |
| [12] | TAO Junfeng, LIU Hai’ou, GUAN Haijie, CHEN Huiyan, ZANG Zheng. Path Planning of Unmanned Tracked Vehicle Based on Terrain Traversability Estimation [J]. Acta Armamentarii, 2023, 44(11): 3320-3332. |
| [13] | ZHANG Ruizeng, GONG Jianwei, CHEN Huiyan, LIU Haiou, LU Jiaxing. Turning Model for Tracked Vehicles on Hard Ground: Analysis and Verification [J]. Acta Armamentarii, 2023, 44(1): 233-246. |
| [14] | ZHANG Faping, ZHANG Shuchang, WU Kai, ZHANG Yunhe, YAN Yan. Dynamics Parameter Optimization for Tracked Vehicle Based on Surrogate Model Evolution [J]. Acta Armamentarii, 2023, 44(1): 27-39. |
| [15] | ZHOU Cheng, LUO Yang, WEI Jiang, CAO Hongrui, LAN Hai, ZHANG Wanhao. Extraction Method of Instantaneous Frequency Feature of Torsional Vibration Signals of Tracked Vehicle Brake [J]. Acta Armamentarii, 2023, 44(1): 316-324. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||