
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (9): 240888-.doi: 10.12382/bgxb.2024.0888
Previous Articles Next Articles
YUAN Shusen1, HU Zhe1, YI Wenjun1,*( ), DENG Wenxiang2, YAO Jianyong2, YANG Guolai2, GUAN Jun3, WANG Yimin4
), DENG Wenxiang2, YAO Jianyong2, YANG Guolai2, GUAN Jun3, WANG Yimin4
Received:2024-09-24
Online:2025-09-24
Contact:
YI Wenjun
CLC Number:
YUAN Shusen, HU Zhe, YI Wenjun, DENG Wenxiang, YAO Jianyong, YANG Guolai, GUAN Jun, WANG Yimin. Active Disturbance Adaptive Composite Control of Stabilization System for Unmanned Vehicle-mounted Gun during Moving[J]. Acta Armamentarii, 2025, 46(9): 240888-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Unmanned vehicle-mounted gun stabilization system

Fig.2 Schematic diagram of installation position of electric cylinder for stabilization system
Fig.3 Principle of co-simulation
Fig.4 Servo tracking process of C1 controller in co-simulation
Fig.5 Comparative tracking errors of four controllers in co-simulation
| 控制器 | Me | Ae | Se |
|---|---|---|---|
| C1 | 0.6277 | 0.1181 | 0.1668 |
| C2 | 0.7323 | 0.1664 | 0.2102 |
| C3 | 0.8106 | 0.2019 | 0.2488 |
| C4 | 2.1607 | 0.4307 | 0.5890 |
Table 1 Performance metrics of four controllers in co-simulation mrad
| 控制器 | Me | Ae | Se |
|---|---|---|---|
| C1 | 0.6277 | 0.1181 | 0.1668 |
| C2 | 0.7323 | 0.1664 | 0.2102 |
| C3 | 0.8106 | 0.2019 | 0.2488 |
| C4 | 2.1607 | 0.4307 | 0.5890 |
Fig.6 Parameter estimation under the action of C1 controller in co-simulation
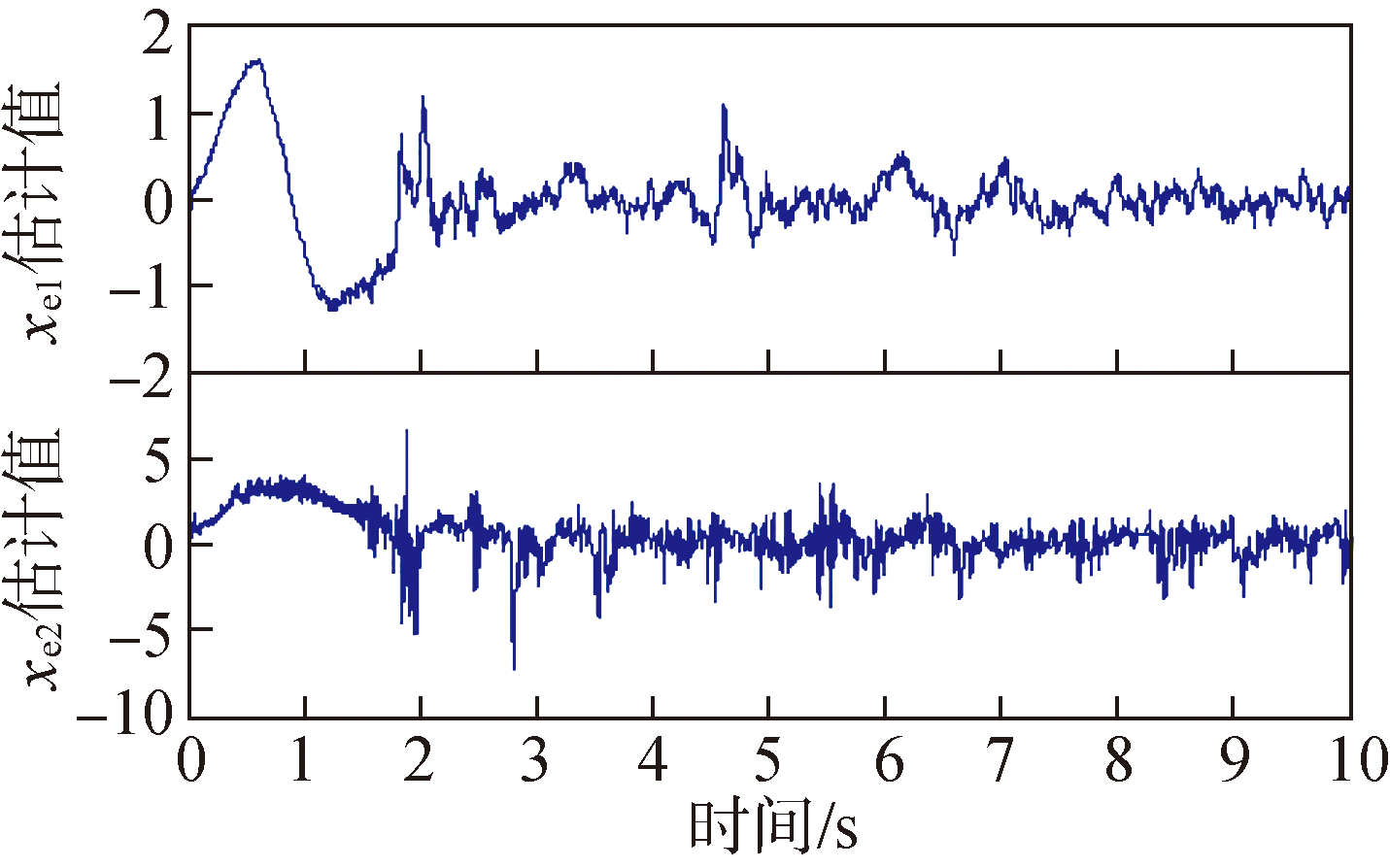
Fig.7 Disturbance estimation under the action of C1 controller in co-simulation
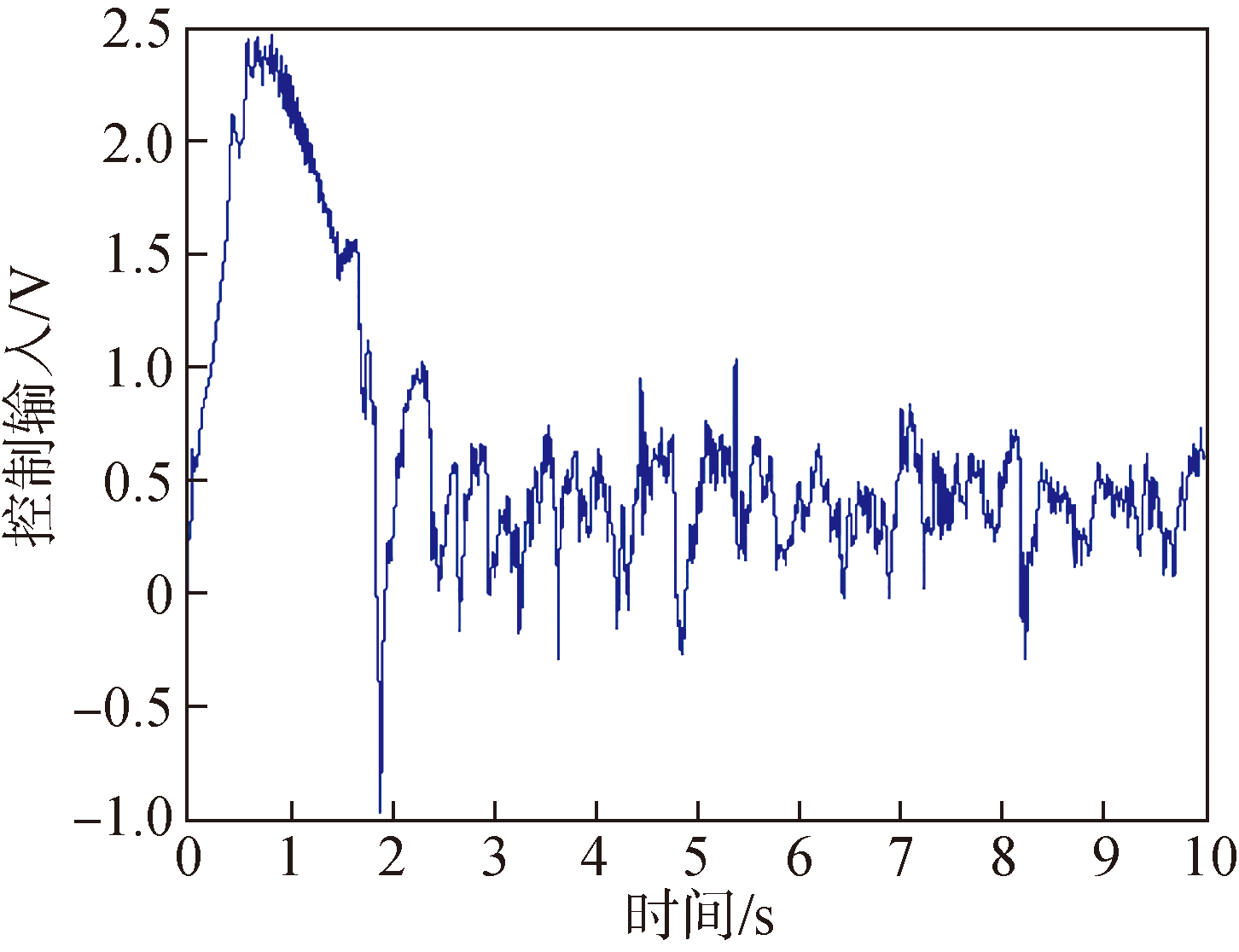
Fig.8 Control input of C1 controller in co-simulation
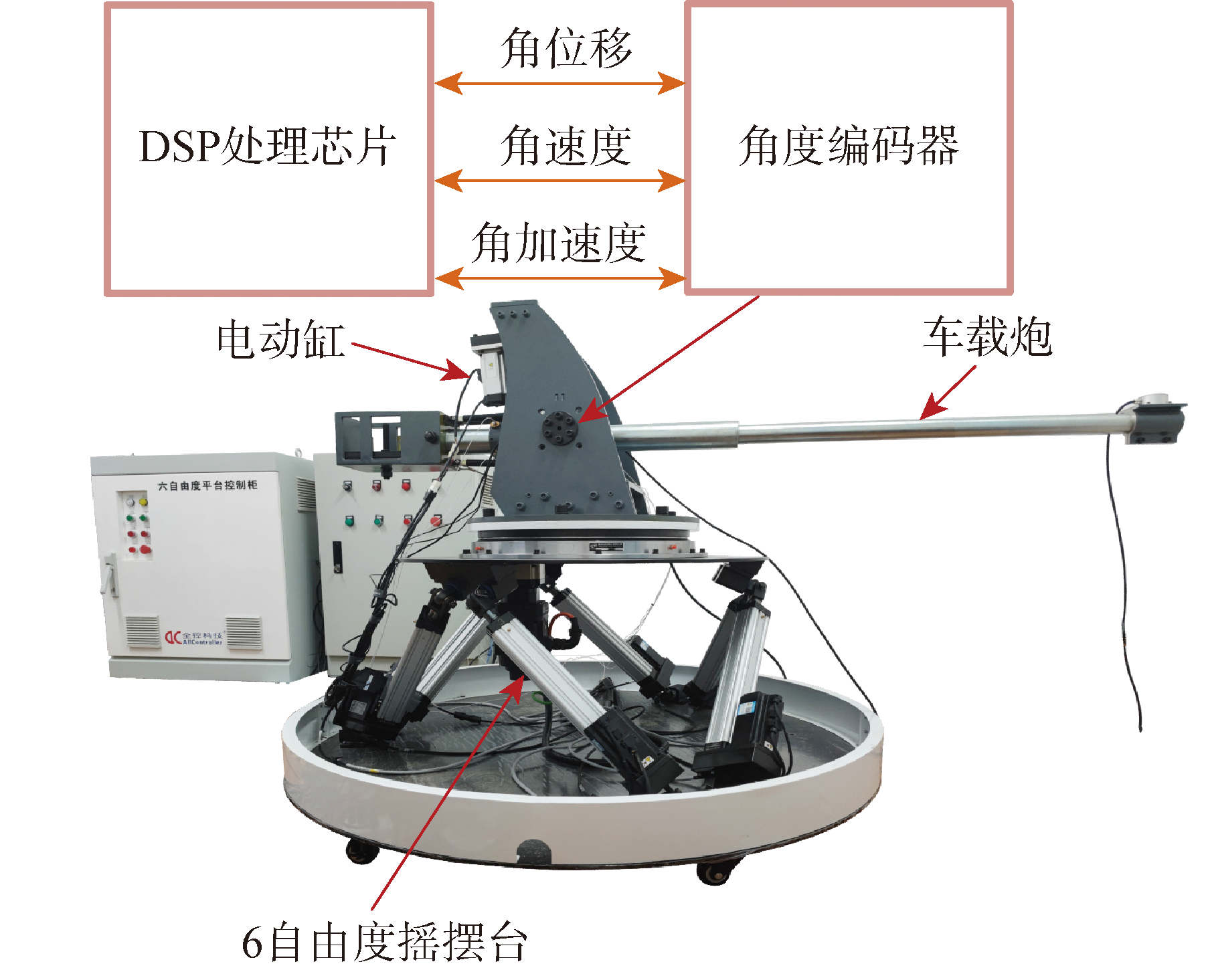
Fig.9 Simulation test platform of vehicle-mounted gun stabilization system
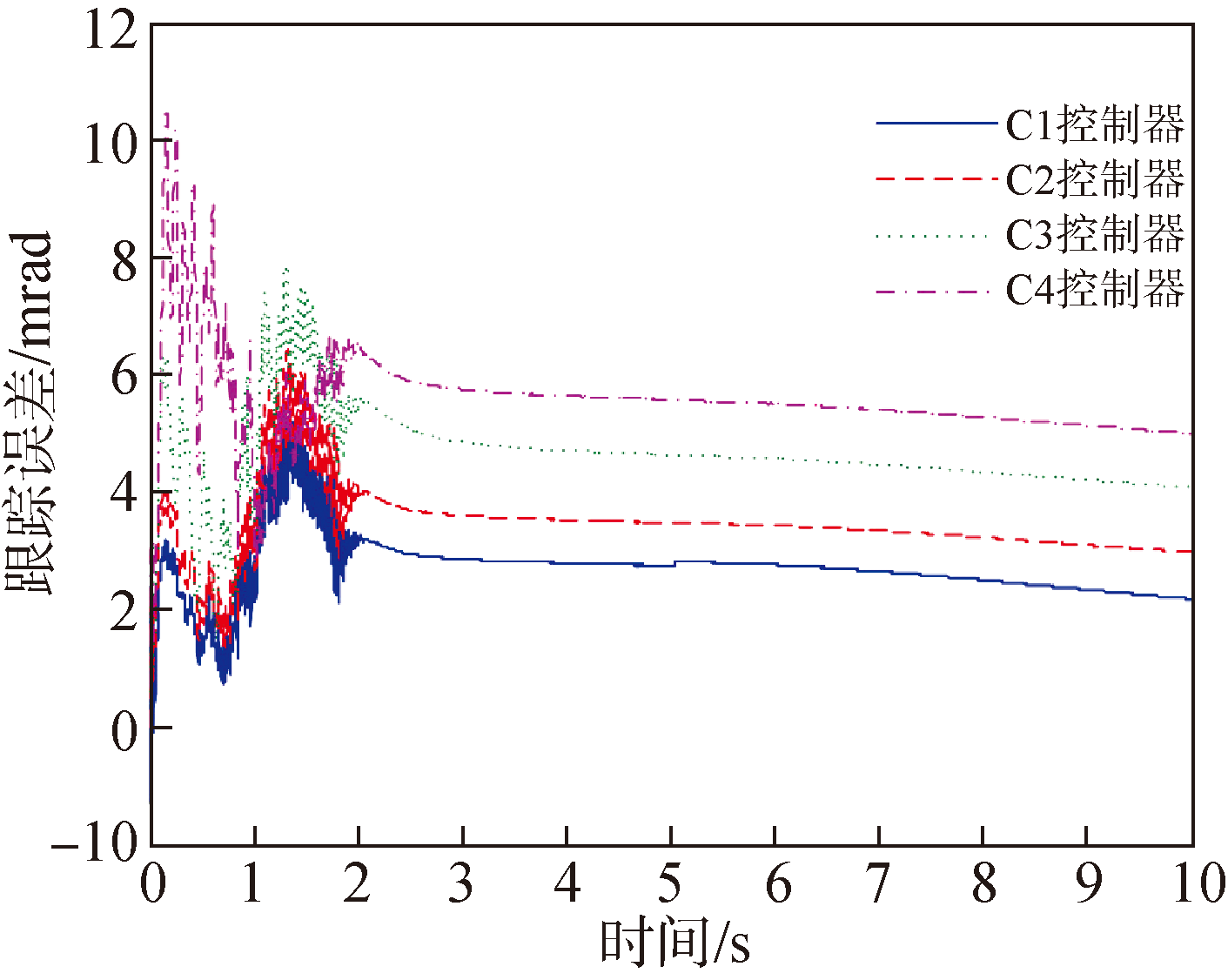
Fig.10 Comparative tracking errors of four controllers in simulation experiment
| 控制器 | Me | Ae | Se |
|---|---|---|---|
| C1 | 5.2275 | 2.7072 | 0.5727 |
| C2 | 6.4201 | 3.4442 | 0.6213 |
| C3 | 7.8646 | 4.6325 | 0.7564 |
| C4 | 10.4680 | 5.5639 | 0.7932 |
Table 2 Performance metrics of four controllers in simulated experiment mrad
| 控制器 | Me | Ae | Se |
|---|---|---|---|
| C1 | 5.2275 | 2.7072 | 0.5727 |
| C2 | 6.4201 | 3.4442 | 0.6213 |
| C3 | 7.8646 | 4.6325 | 0.7564 |
| C4 | 10.4680 | 5.5639 | 0.7932 |
| [1] |
李嘉麒, 魏曙光, 廖自力, 等. 陆战平台全电化关键技术发展综述[J]. 兵工学报, 2021, 42(10):2049-2059.
doi: 10.3969/j.issn.1000-1093.2021.10.001 |
|
doi: 10.3969/j.issn.1000-1093.2021.10.001 |
|
| [2] |
关海杰, 王博洋, 王旭睿, 等. 搭载任务载荷军用地面无人系统发展综述[J]. 兵工学报, 2023, 44(11):3333-3344.
doi: 10.12382/bgxb.2023.0263 |
|
doi: 10.12382/bgxb.2023.0263 |
|
| [3] |
常建龙, 段心磊, 武瑞文, 等. 无人智能化关键技术及其在火炮系统中的应用[J]. 火炮发射与控制学报, 2021, 42(3):100-105.
|
|
|
|
| [4] |
袁树森, 邓文翔, 姚建勇, 等. 全电坦克双向稳定系统自适应积分鲁棒控制[J]. 兵工学报, 2023, 44(1):140-155.
doi: 10.12382/bgxb.2022.0107 |
|
doi: 10.12382/bgxb.2022.0107 |
|
| [5] |
|
| [6] |
李伟, 姜俊峰, 任海波, 等. 行进间火炮指向稳定跟踪系统建模与控制[J]. 兵工学报, 2018, 39(8):1479-1490.
doi: 10.3969/j.issn.1000-1093.2018.08.004 |
|
doi: 10.3969/j.issn.1000-1093.2018.08.004 |
|
| [7] |
马毓泽, 杨国来. 坦克行进间垂向稳定器机电液系统的建模与仿真[J]. 弹道学报, 2019, 31(1):23-28.
doi: 10.12115/j.issn.1004-499X(2019)01-005 |
|
|
|
| [8] |
郭超哲, 赵永娟, 冀云彪, 等. 基于模糊PID控制方法的坦克行进间炮口振动控制研究[J]. 火炮发射与控制学报, 2024, 45(4):55-61.
|
|
|
|
| [9] |
李银伢, 盛安冬, 王远钢. 基于粒子群优化的伺服系统比例积分微分控制器设计方法[J]. 兵工学报, 2006, 27(2):202-205.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
李伟, 杨刚, 陈腾飞, 等. 某全闭环操瞄系统的火炮身管指向控制研究[J]. 兵工学报, 2015, 36(9):1811-1818.
doi: 10.3969/j.issn.1000-1093.2015.09.029 |
|
doi: 10.3969/j.issn.1000-1093.2015.09.029 |
|
| [16] |
|
| [17] |
|
| [18] |
田灵飞, 钱林方, 陈龙淼, 等. 基于未知输入观测器的车载炮电液位置伺服系统故障检测[J]. 兵工学报, 2018, 39(11):2100-2108.
doi: 10.3969/j.issn.1000-1093.2018.11.003 |
|
|
|
| [19] |
|
| [20] |
朱威霖, 姚建勇, 刘家辉, 等. 泵控多连杆式起竖系统自抗扰力同步控制[J]. 兵工学报, 2024, 45(6):1906-1920.
doi: 10.12382/bgxb.2023.0318 |
|
doi: 10.12382/bgxb.2023.0318 |
|
| [21] |
高全喜, 可伟, 乔海岩. 基于线性自抗扰的水下运载器控制[J]. 兵工学报, 2023, 44(3):783-791.
doi: 10.12382/bgxb.2021.0769 |
|
doi: 10.12382/bgxb.2021.0769 |
|
| [22] |
邱晓波, 窦丽华, 韩京清, 等. 自抗扰控制在坦克机动目标状态估计中的应用[J]. 兵工学报, 2009, 30(7):989-993.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
吕明明, 谢华伟, 钟伟, 等. 船舶舵机电静液作动器的分数阶线性自抗扰控制[J]. 兵工学报, 2024, 45(5):1514-1522.
doi: 10.12382/bgxb.2022.0922 |
|
doi: 10.12382/bgxb.2022.0922 |
| [1] | WANG Zeqing, XU Haixiang, YU Wenzhao, DU Zhe, WANG Hongmei. Dual-Loop Prescribed-Time 3D Formation Control of Underactuated Multi-AUVs [J]. Acta Armamentarii, 2025, 46(8): 250046-. |
| [2] | LI Junhui, WANG Wei, WANG Yuchen, JI Yi. Unmanned Aerial Vehicle Formation Control Based on Prescribed-time Consensus Theory [J]. Acta Armamentarii, 2025, 46(8): 240863-. |
| [3] | XIE Jingshuo, HAN Lijin, LIU Hui, REN Xiaolei, HOU Hongyu, SHANG Qingyi. Attitude Control Method of Serial Wheel-legged Robot [J]. Acta Armamentarii, 2025, 46(2): 240183-. |
| [4] | ZHANG Jiaxuan, LI Bin, NIU Wenchao, LI Kaixiang. Adaptive Fractional Order Positive Position Feedback for Vibration Control of Vertical Tail [J]. Acta Armamentarii, 2024, 45(8): 2542-2553. |
| [5] | ZHAO Xinyun, YU Jianqiao. Dynamic Modeling and Attitude Control for Novel Agile Projectile [J]. Acta Armamentarii, 2024, 45(7): 2182-2196. |
| [6] | XIE Xin, ZHENG Jieji, LI Baoyu, YU Bin, FAN Dapeng. Online Identification and Adaptive Control Method for Servo Transmission Device in Weapon Station [J]. Acta Armamentarii, 2024, 45(6): 1761-1775. |
| [7] | CHEN Guiming, XU Lingliang. Ultra-local Model-free Current Predictive Control of Permanent Magnet Synchronous Motor Based on Nonlinear Disturbance Compensation [J]. Acta Armamentarii, 2024, 45(4): 1129-1140. |
| [8] | BAO Dan, WEI Yukai, JIN Xin, HOU Baolin. Adaptive Control of Magazines Considering Output Constraints and Input Saturation [J]. Acta Armamentarii, 2024, 45(3): 789-797. |
| [9] | PEI Xinyue, YU Yong, LI Zheng, LI Jiaxun, YU Jianqiao. Control of Quick Turning of Missile with Lateral Thrust and Aerodynamics Based on Neural Network [J]. Acta Armamentarii, 2024, 45(10): 3564-3576. |
| [10] | WANG Liang, WANG Shoukun, NIU Tianwei, WANG Junzheng. Speed Control Method for Unmanned Special Vehicle Based on Terrain Feature Time-frequency Transform [J]. Acta Armamentarii, 2024, 45(10): 3718-3731. |
| [11] | YU Zhilong, LI Yinghui, PEI Binbin, XU Wenfeng, DUAN Xiaocong, SONG Kexin. Robust Adaptive Fault-tolerant Attitude Control of Flying-wing UAVs with Flight Envelope Constraints [J]. Acta Armamentarii, 2024, 45(1): 231-240. |
| [12] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [13] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [14] | WANG Zhilin, WANG Jiang, QI Qi, FAN Shipeng. Novel Adaptive Robust Roll Control Method Based on LESO [J]. Acta Armamentarii, 2023, 44(7): 1920-1929. |
| [15] | MIN Boxu, GAO Jian, JING Anyan, CHEN Yimin, WANG Jiarun, PAN Guang. Robust Event-triggered Adaptive Pitch Attitude Control for Underwater Gliders with Actuator Faults [J]. Acta Armamentarii, 2023, 44(7): 2092-2100. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||