
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (8): 2542-2553.doi: 10.12382/bgxb.2023.0570
Previous Articles Next Articles
ZHANG Jiaxuan1,2, LI Bin1,2,*( ), NIU Wenchao3, LI Kaixiang2,4
), NIU Wenchao3, LI Kaixiang2,4
Received:2023-06-13
Online:2023-11-24
Contact:
LI Bin
CLC Number:
ZHANG Jiaxuan, LI Bin, NIU Wenchao, LI Kaixiang. Adaptive Fractional Order Positive Position Feedback for Vibration Control of Vertical Tail[J]. Acta Armamentarii, 2024, 45(8): 2542-2553.
Add to citation manager EndNote|Ris|BibTeX
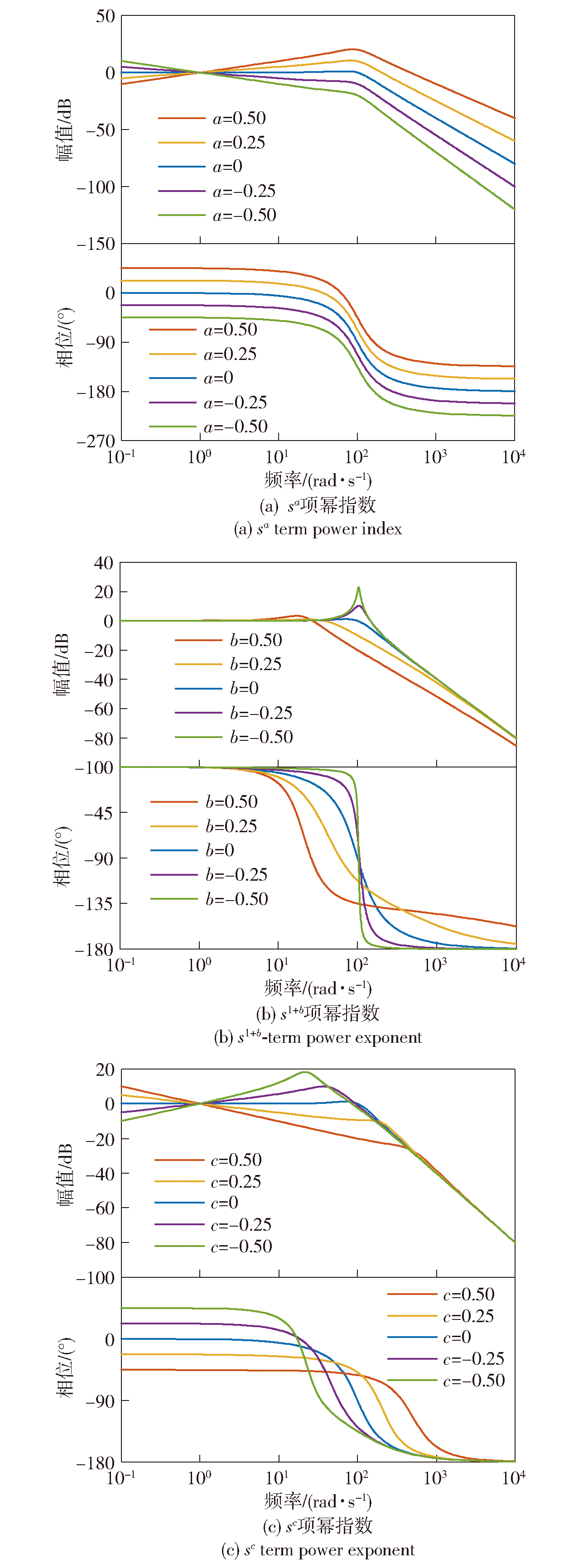
Fig.1 Bode diagram of FOPPF controller with different variables
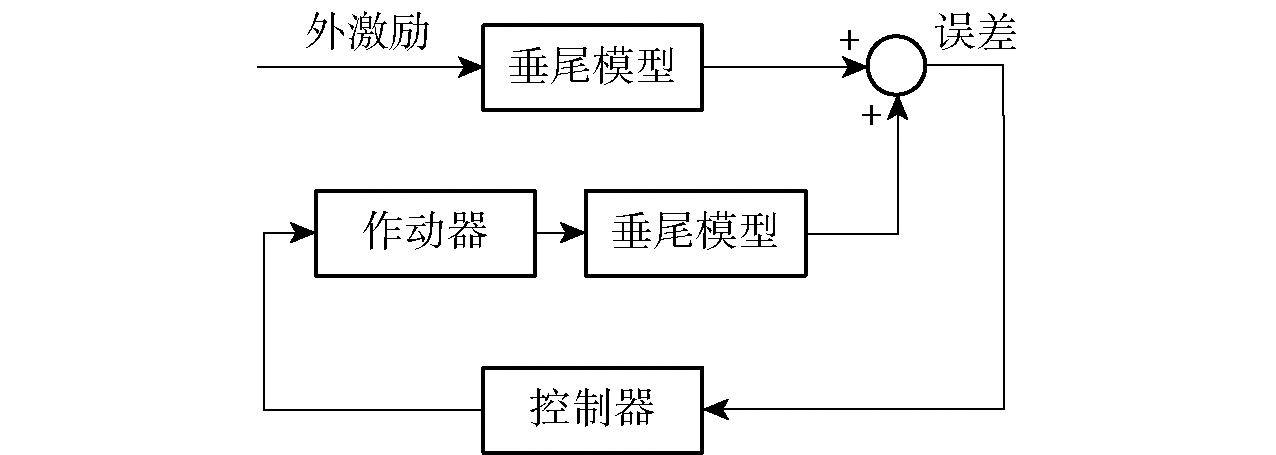
Fig.2 Block diagram of closed-loop FOAPPF control system
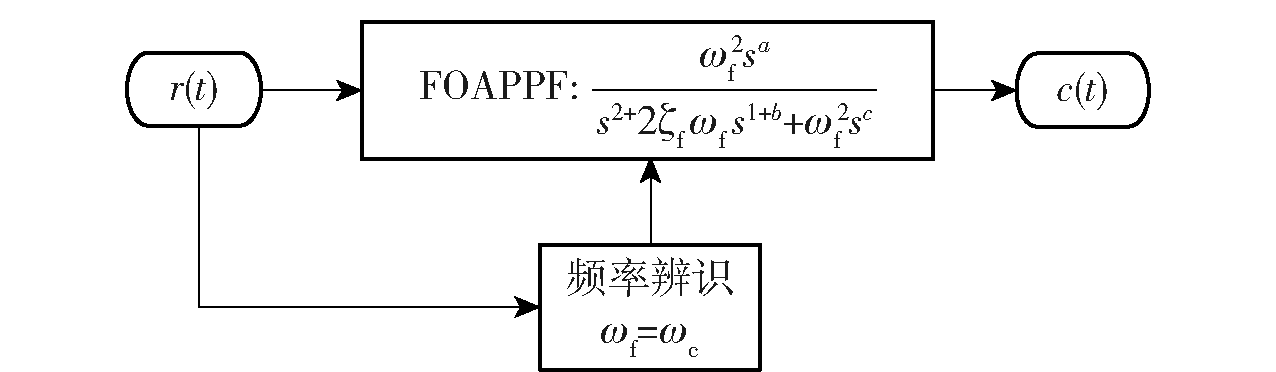
Fig.3 Block diagram of FOAPPF controller

Fig.4 Experimental system
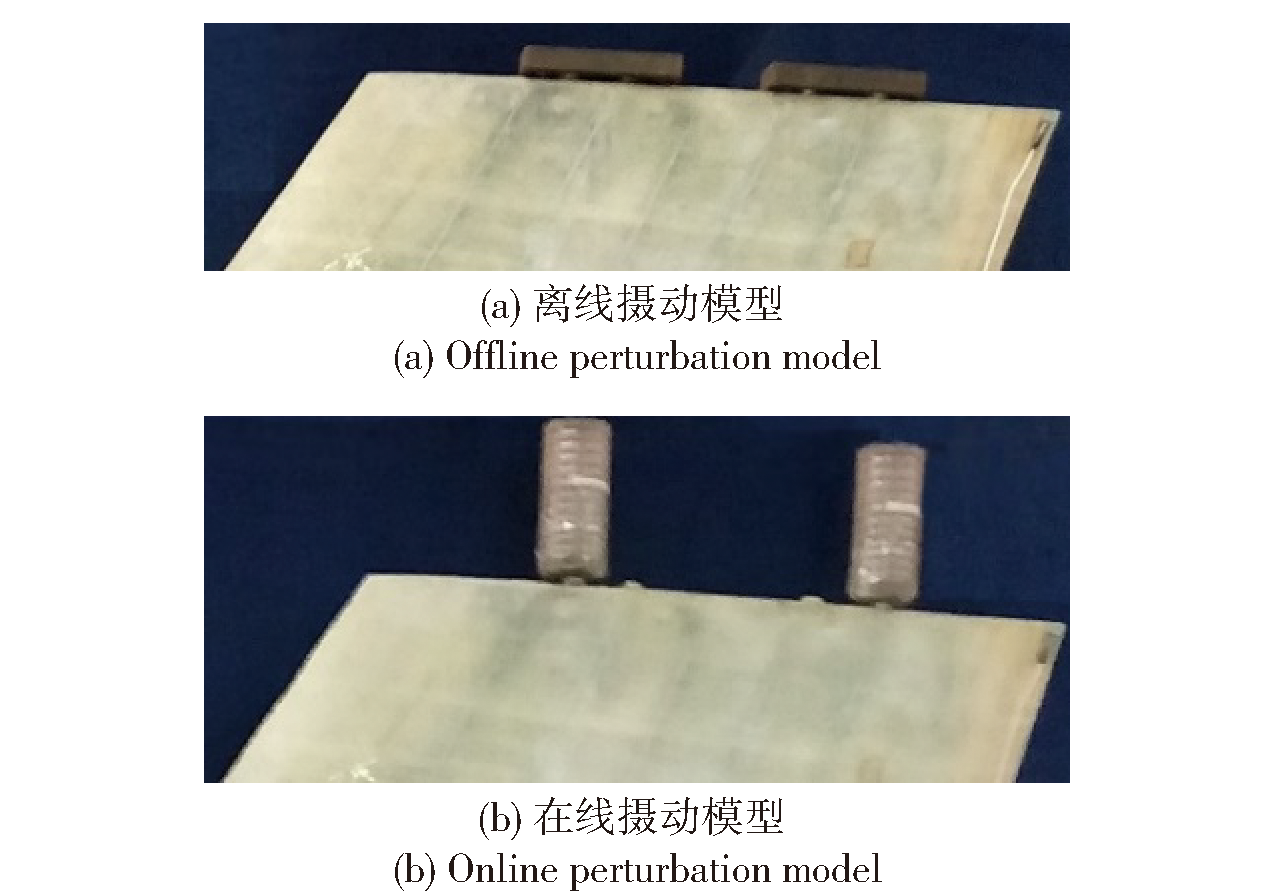
Fig.5 Construction schemes of perturbation model
| 模型描述 | 固有频率/Hz | 摄动模型 |
|---|---|---|
| 无质量块 | 13.50 | 标称模型 |
| 1个质量块 | 12.00 | -11%摄动模型 |
| 2个质量块 | 10.75 | -20%摄动模型 |
| 实时增加铁砂 | 13.50~10.75 | -20%缓变模型 |
Table 1 Perturbation model of vertical tail
| 模型描述 | 固有频率/Hz | 摄动模型 |
|---|---|---|
| 无质量块 | 13.50 | 标称模型 |
| 1个质量块 | 12.00 | -11%摄动模型 |
| 2个质量块 | 10.75 | -20%摄动模型 |
| 实时增加铁砂 | 13.50~10.75 | -20%缓变模型 |
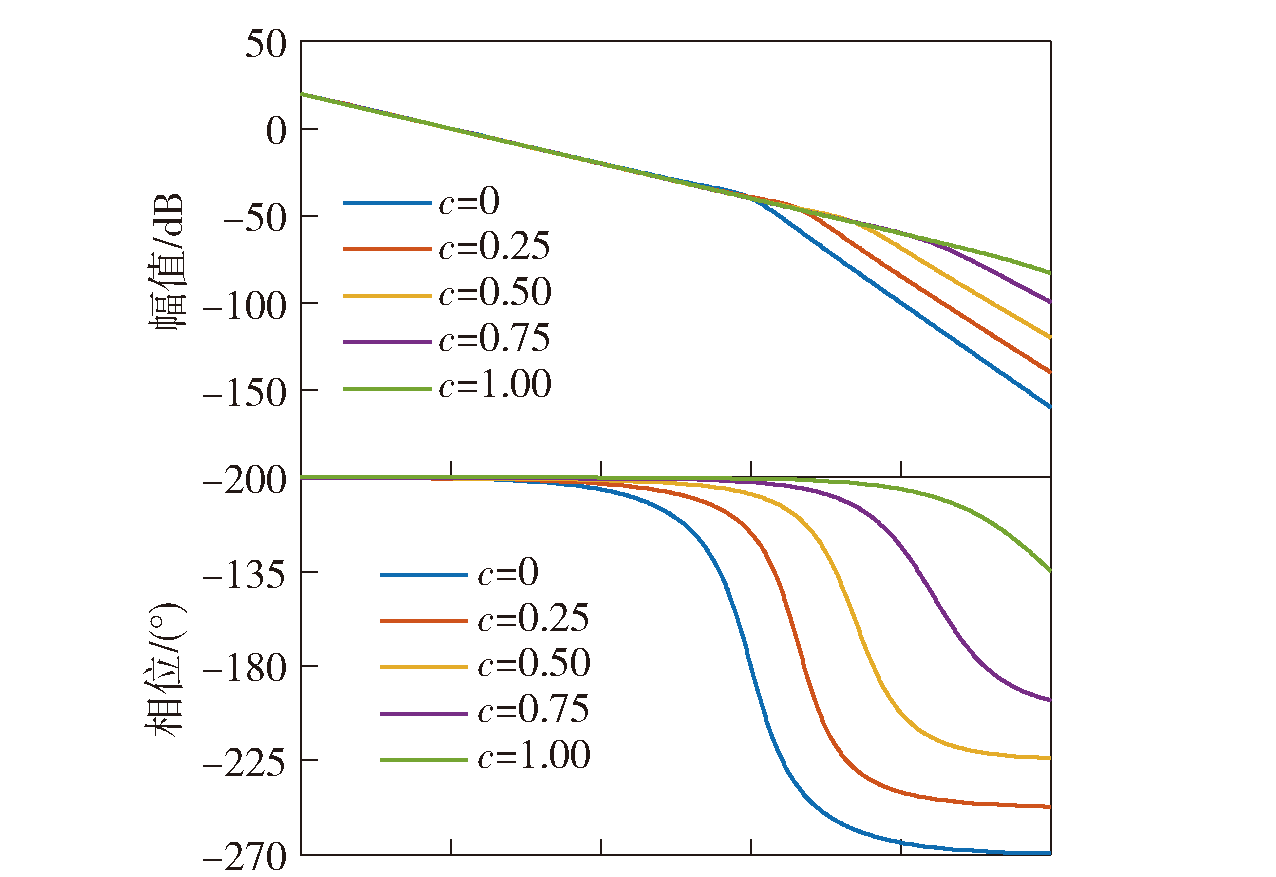
Fig.6 Bode diagram of FOPPF controller in Scheme 1
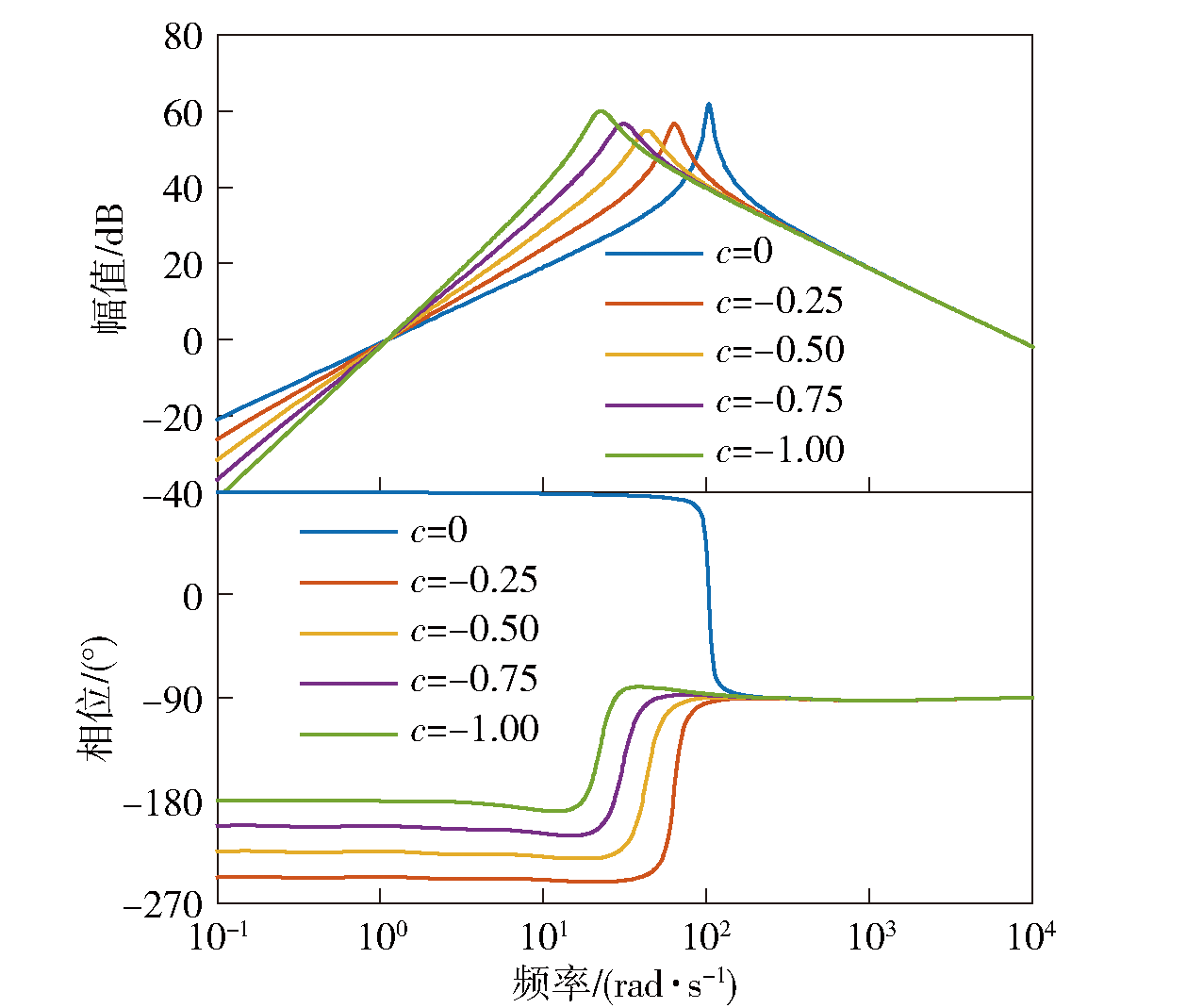
Fig.7 Bode diagram of FOPPF controller in Scheme 2
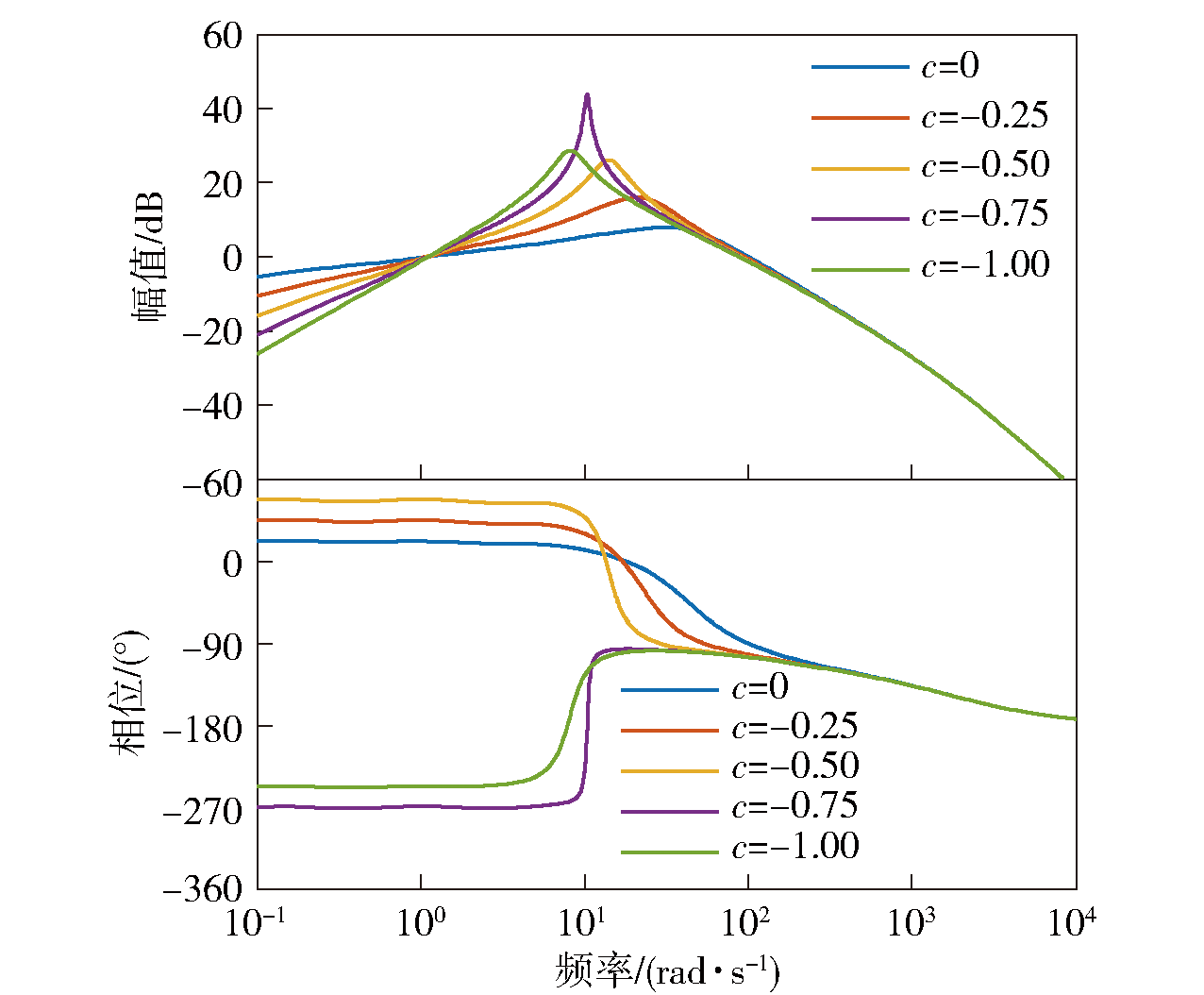
Fig.8 Bode diagram of FOPPF controller in Scheme 3
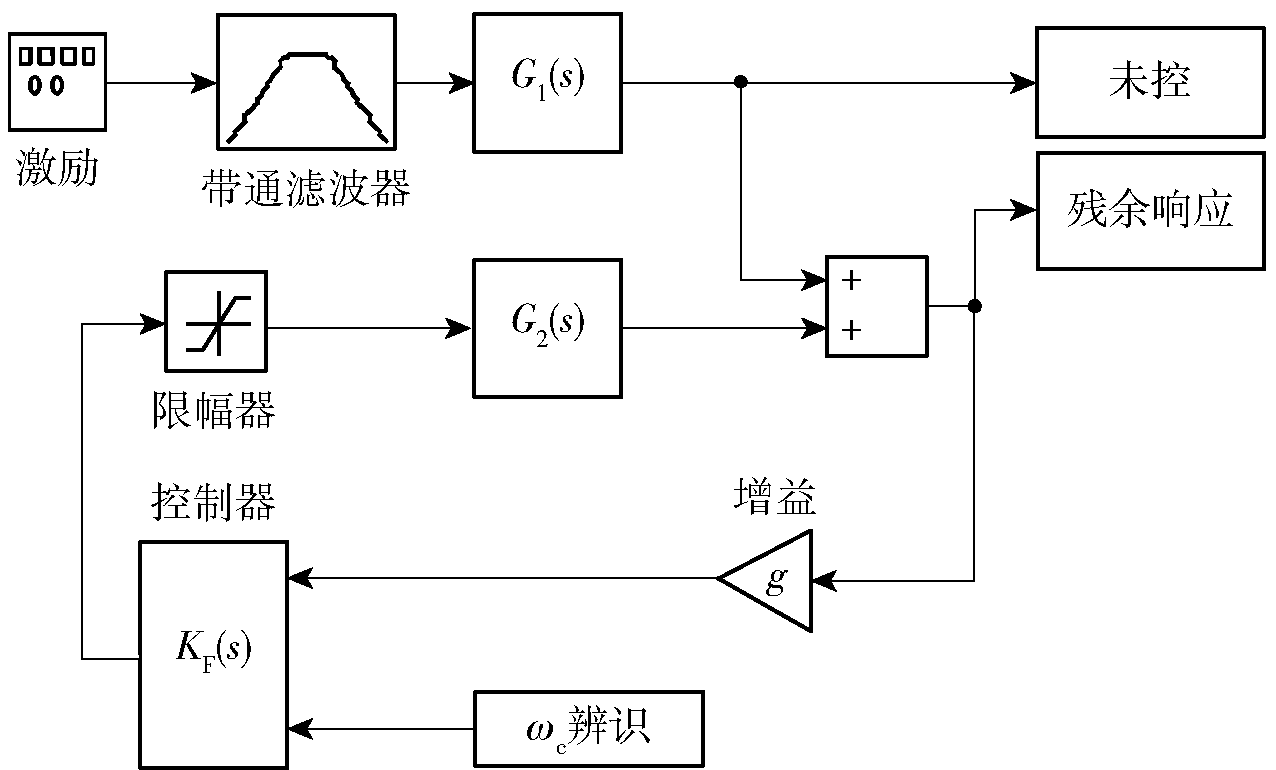
Fig.9 Simulation block diagram
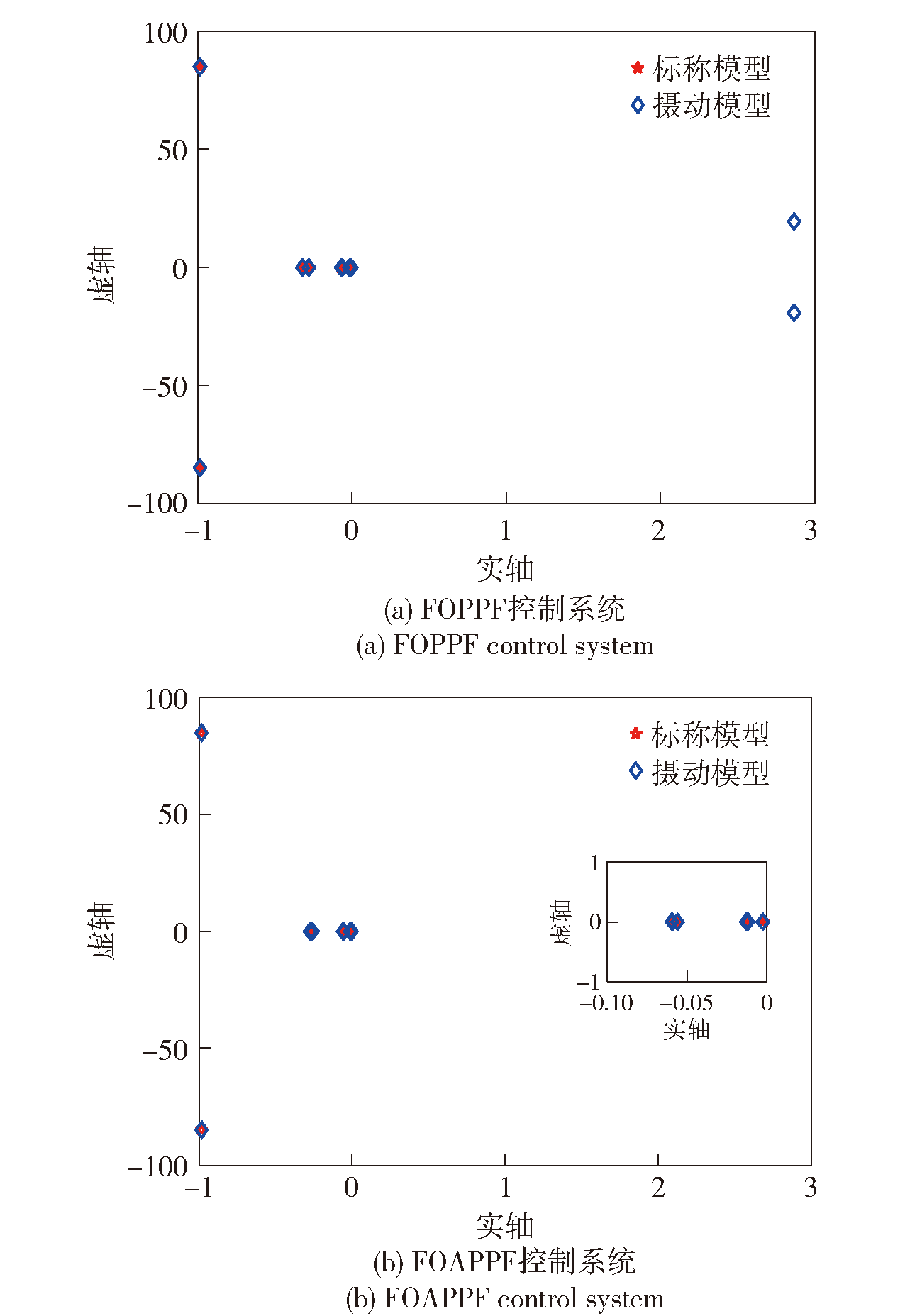
Fig.10 Pole distribution of control systems

Fig.11 Contrast of Bode diagrams of FOAPPF and APPF controllers
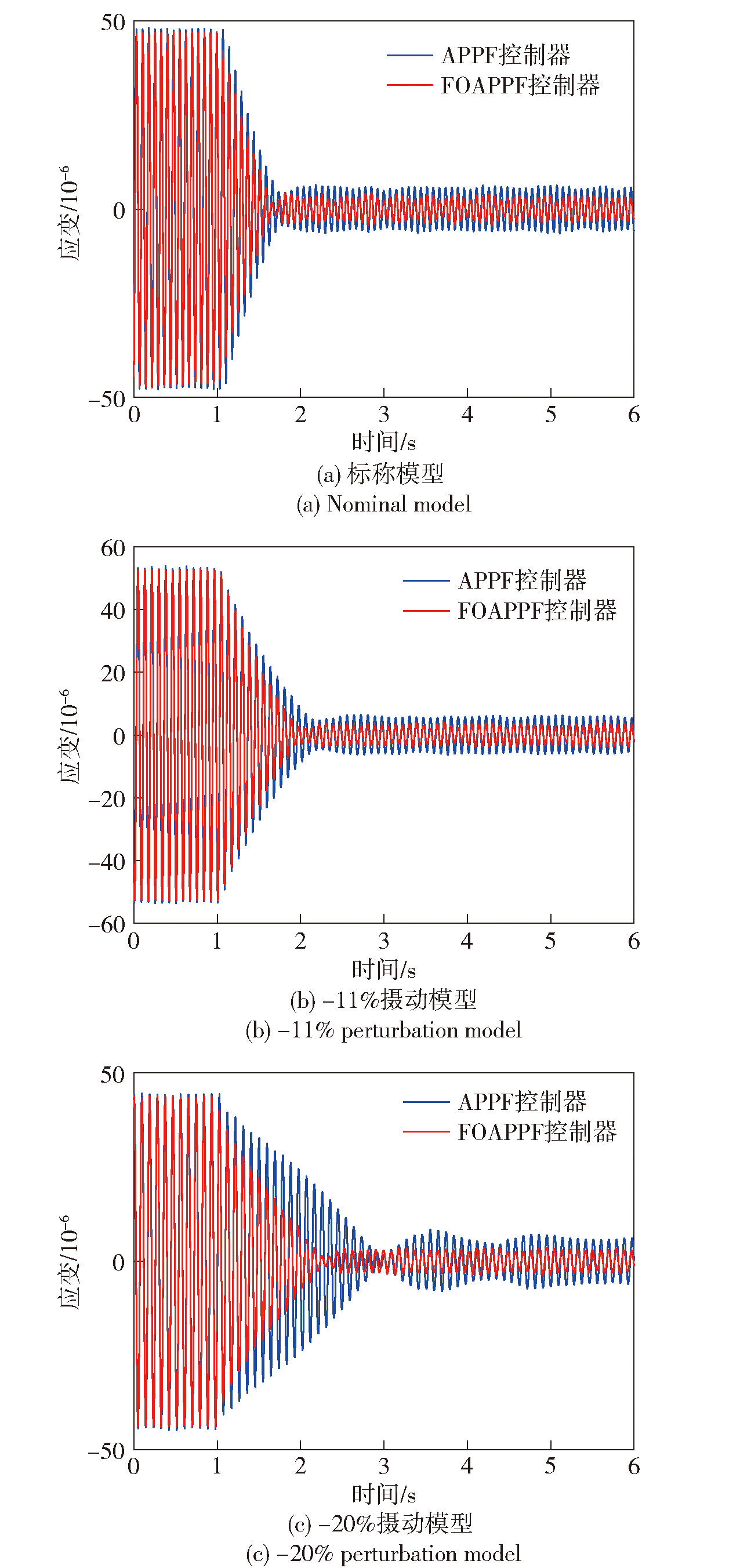
Fig.12 First order bending mode suppression performance of fixed frequency sinusoidal response
| 控制器 | 标称模型 | -11% 摄动模型 | -20% 摄动模型 | |||
|---|---|---|---|---|---|---|
| RMS/% | PSD/dB | RMS/% | PSD/dB | RMS/% | PSD/dB | |
| APPF | 53.30 | 9.29 | 57.10 | 10.55 | 39.50 | 6.65 |
| FOPPF | 66.72 | 16.27 | 54.13 | 13.58 | 36.53 | 5.59 |
| FOAPPF | 59.50 | 12.65 | 66.80 | 19.47 | 55.00 | 12.38 |
Table 2 RMS reduction ratio and PSD peak reduction value for random response near the 1st order bending mode
| 控制器 | 标称模型 | -11% 摄动模型 | -20% 摄动模型 | |||
|---|---|---|---|---|---|---|
| RMS/% | PSD/dB | RMS/% | PSD/dB | RMS/% | PSD/dB | |
| APPF | 53.30 | 9.29 | 57.10 | 10.55 | 39.50 | 6.65 |
| FOPPF | 66.72 | 16.27 | 54.13 | 13.58 | 36.53 | 5.59 |
| FOAPPF | 59.50 | 12.65 | 66.80 | 19.47 | 55.00 | 12.38 |
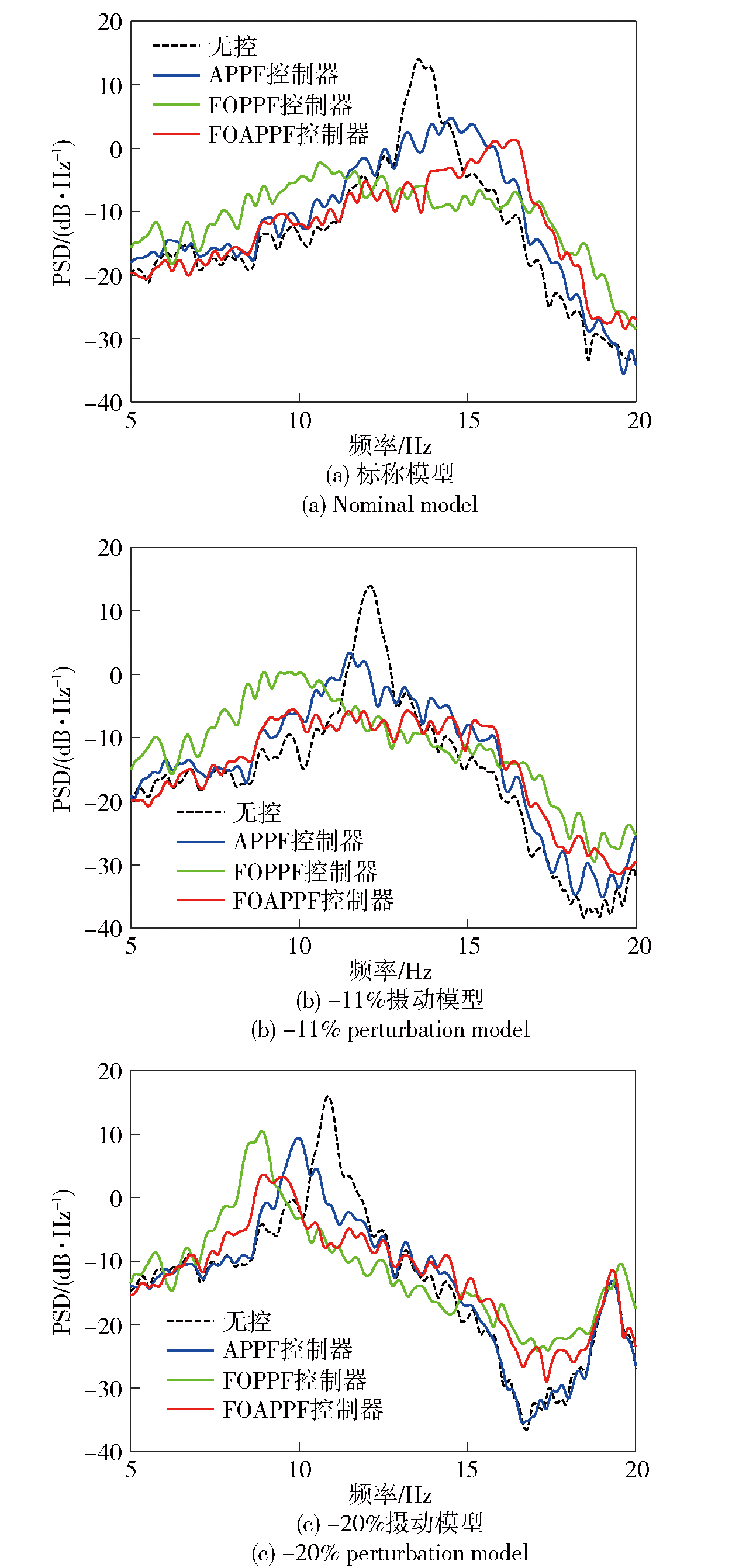
Fig.13 PSD spectrum of random response of vertical tail near the 1st order bending mode
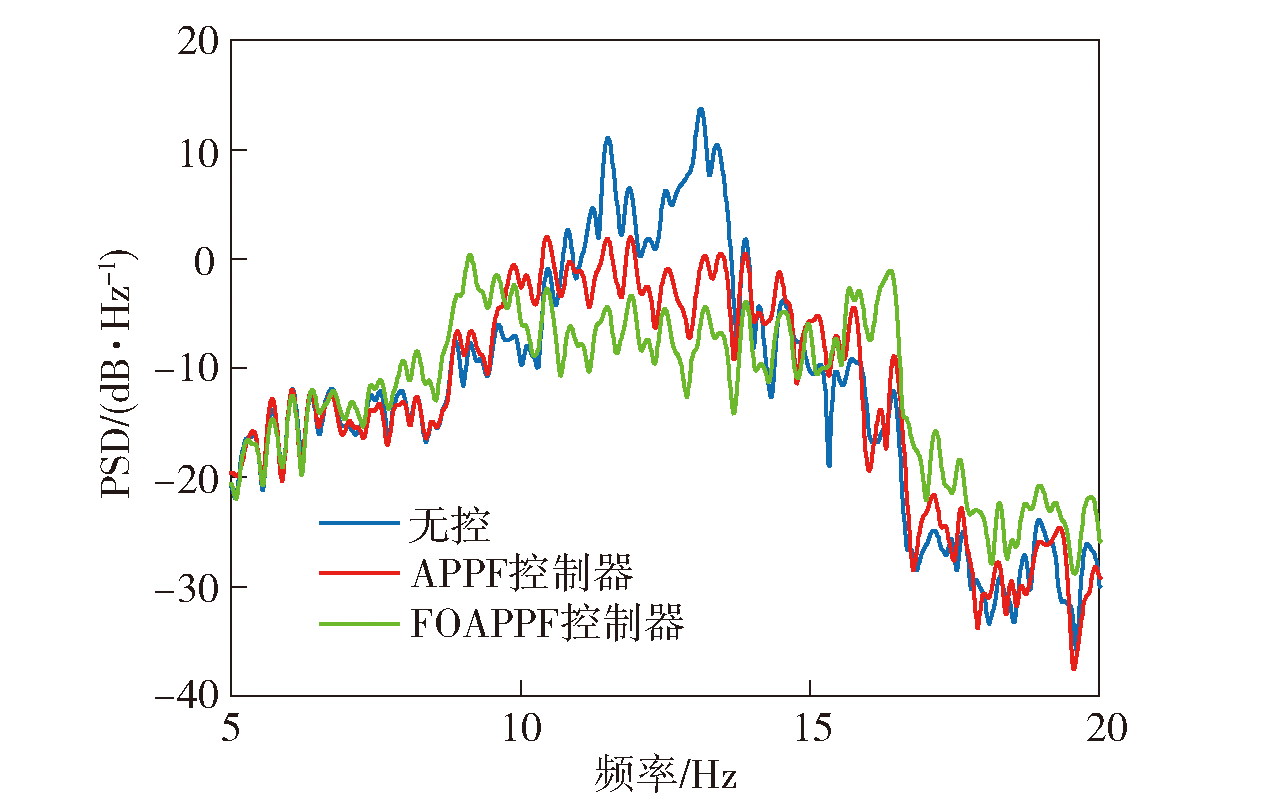
Fig.14 PSD spectrum of online perturbation random response ofvertical tail model
| 控制器 | RMS/% | PSD峰值/dB |
|---|---|---|
| APPF | 43.01 | 11.71 |
| FOAPPF | 57.83 | 13.40 |
Table 3 RMS reduction ratio and PSD peak reduction value of online perturbation random response of vertical tail model
| 控制器 | RMS/% | PSD峰值/dB |
|---|---|---|
| APPF | 43.01 | 11.71 |
| FOAPPF | 57.83 | 13.40 |
| [7] |
|
| [8] |
梁捷, 陈力. 柔性空间机械臂末端运动及柔性振动的模糊自适应补偿控制[J]. 兵工学报, 2011, 32(1): 45-57.
|
|
|
|
| [9] |
|
| [10] |
黄大山, 张进秋, 刘义乐, 等. 车辆馈能悬挂系统滑模控制及能量管理策略研究[J]. 兵工学报, 2016, 37(12): 2185-2195.
doi: 10.3969/j.issn.1000-1093.2016.12.002 |
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
牛文超, 李斌, 高振宇, 等. 基于一阶PPF的垂尾振动分数阶控制[J]. 航空学报, 2018, 39(8):172-181.
|
|
|
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
曹树谦, 张文德, 萧龙翔. 振动结构模态分析: 理论, 实验与应用[M]. 天津: 天津大学出版社, 2001.
|
|
|
|
| [1] |
金伟, 杨智春, 孟德虹, 等. 先进战斗机全动V尾抖振动强度设计与验证[J]. 航空学报, 2020, 41(6):318-332.
|
|
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [1] | XIE Xin, ZHENG Jieji, LI Baoyu, YU Bin, FAN Dapeng. Online Identification and Adaptive Control Method for Servo Transmission Device in Weapon Station [J]. Acta Armamentarii, 2024, 45(6): 1761-1775. |
| [2] | BAO Dan, WEI Yukai, JIN Xin, HOU Baolin. Adaptive Control of Magazines Considering Output Constraints and Input Saturation [J]. Acta Armamentarii, 2024, 45(3): 789-797. |
| [3] | YU Zhilong, LI Yinghui, PEI Binbin, XU Wenfeng, DUAN Xiaocong, SONG Kexin. Robust Adaptive Fault-tolerant Attitude Control of Flying-wing UAVs with Flight Envelope Constraints [J]. Acta Armamentarii, 2024, 45(1): 231-240. |
| [4] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [5] | MIN Boxu, GAO Jian, JING Anyan, CHEN Yimin, WANG Jiarun, PAN Guang. Robust Event-triggered Adaptive Pitch Attitude Control for Underwater Gliders with Actuator Faults [J]. Acta Armamentarii, 2023, 44(7): 2092-2100. |
| [6] | LI Xianyan, XU Wei, JIANG Lei, SUN Zeyuan, XIE Qiang, ZENG Yi, ZHENG Dongdong. Adaptive Prescribed Performance Control of Autonomous Vehicles with Input Saturation [J]. Acta Armamentarii, 2023, 44(11): 3310-3319. |
| [7] | TANG Zeyue, LIU Haiou, XUE Mingxuan, CHEN Huiyan, GONG Xiaojie, TAO Junfeng. Trajectory Tracking Control of Dual Independent Electric Drive Unmanned Tracked Vehicle Based on MPC-MFAC [J]. Acta Armamentarii, 2023, 44(1): 129-139. |
| [8] | YUAN Shusen, DENG Wenxiang, YAO Jianyong, YANG Guolai. Adaptive Integral Robust Control for the Bidirectional Stability System of All-electric Tanks [J]. Acta Armamentarii, 2023, 44(1): 140-155. |
| [9] | XIE Zheng, XIE Jian, DU Wen-zheng, LI Liang, GUO Yang. Sliding Mode Control for Hydraulic Erecting System of Large Launcher [J]. Acta Armamentarii, 2015, 36(4): 674-680. |
| [10] | ZHANG Yi-chao, ZHOU Xu-chang, ZHOU Hao. Decentralized Adaptive Variable Structure Control for Banktoturn Torpedo [J]. Acta Armamentarii, 2013, 34(11): 1469-1473. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||