
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (10): 3718-3731.doi: 10.12382/bgxb.2023.0823
Previous Articles Next Articles
WANG Liang, WANG Shoukun*( ), NIU Tianwei, WANG Junzheng
), NIU Tianwei, WANG Junzheng
Received:2023-08-29
Online:2024-03-18
Contact:
WANG Shoukun
CLC Number:
WANG Liang, WANG Shoukun, NIU Tianwei, WANG Junzheng. Speed Control Method for Unmanned Special Vehicle Based on Terrain Feature Time-frequency Transform[J]. Acta Armamentarii, 2024, 45(10): 3718-3731.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Speed adaptive control based on terrain features in frequency domain
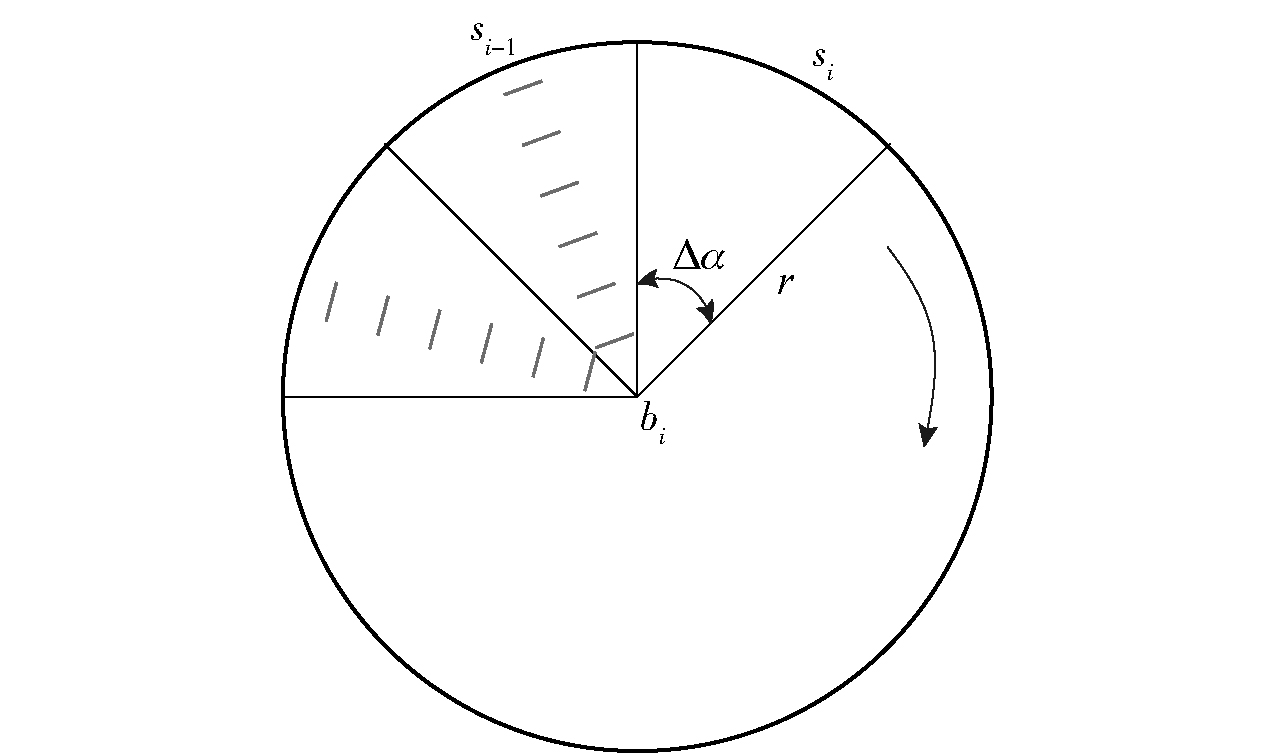
Fig.2 Equidistant division of laser beams
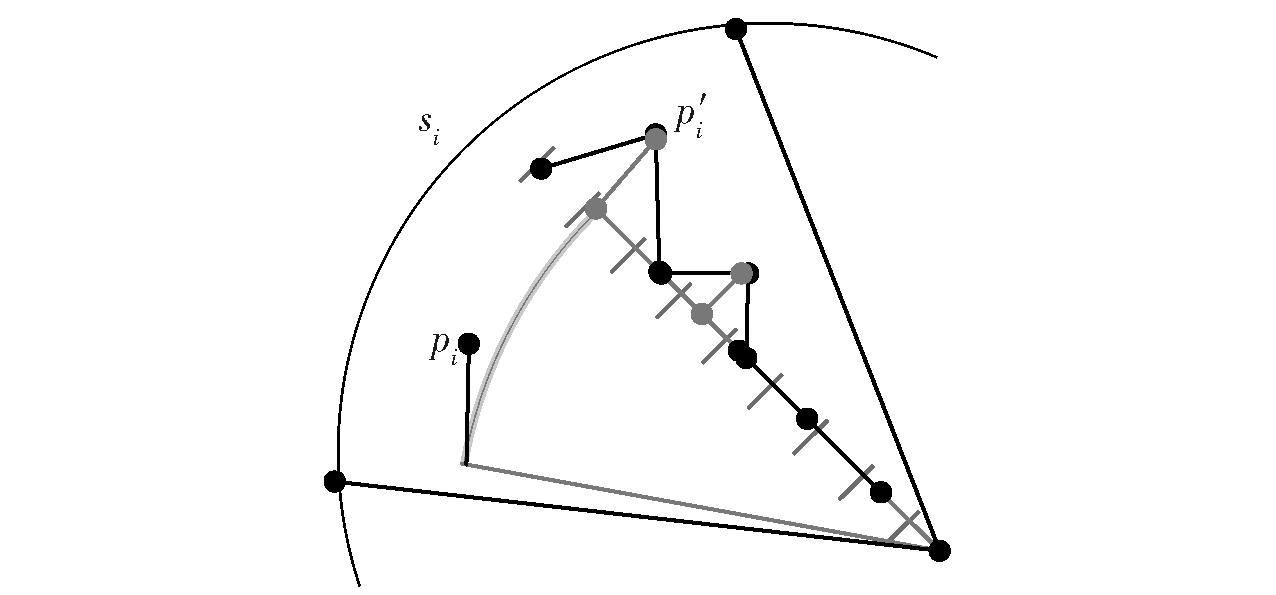
Fig.3 Unit grid division of segments

Fig.4 Vehicle speed a adaptive djustment strategy

Fig.5 z value map of simulated composite terrain longitudinal section point cloud

Fig.6 Amplitude-frequency characteristic curves corresponding to different sampling frequencies
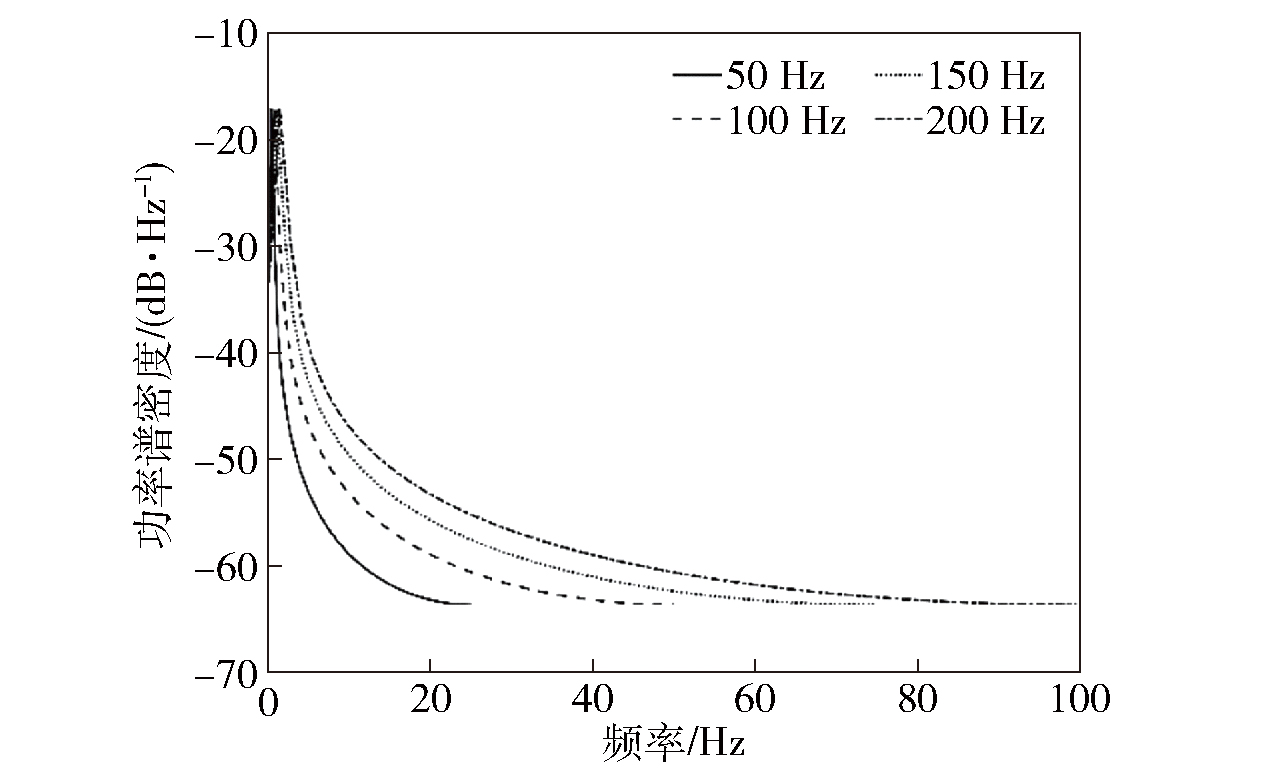
Fig.7 Power spectral density curves corresponding to different sampling frequencies
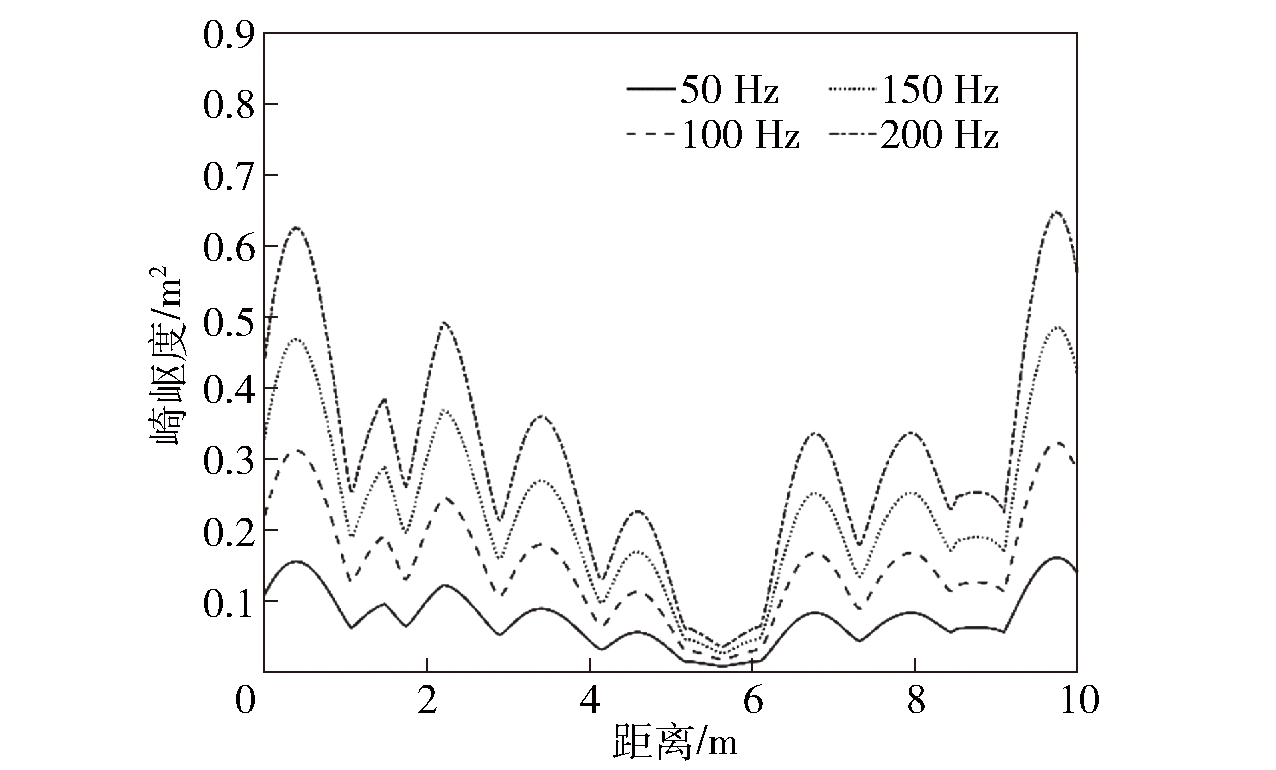
Fig.8 Different sampling frequencies corresponding to the change curves of roughness

Fig.9 Vehicle-mounted laser terrain scanning experimental platform

Fig.10 Hardware connection and communication method
| 参数 | 数值 |
|---|---|
| 震源车长度/m | 10.0 |
| 震源车宽度/m | 3.38 |
| 震源车高度/m | 3.6 |
| 震源车前后轴距/m | 4 |
| 激光雷达距地高度/m | 1.4 |
| 激光雷达扫描频率/Hz | 20 |
| 激光雷达水平扫描范围/(°) | 360 |
| 激光雷达垂直扫描范围/(°) | -55~15 |
| 激光雷达有效测量距离/m | 150 |
| GPS频率/Hz | 20 |
| GPS定位精度/m | 0.01 |
| IMU频率/Hz | 50 |
| IMU精度/(°) | 0.05 |
Table 1 Experimental platform parameters
| 参数 | 数值 |
|---|---|
| 震源车长度/m | 10.0 |
| 震源车宽度/m | 3.38 |
| 震源车高度/m | 3.6 |
| 震源车前后轴距/m | 4 |
| 激光雷达距地高度/m | 1.4 |
| 激光雷达扫描频率/Hz | 20 |
| 激光雷达水平扫描范围/(°) | 360 |
| 激光雷达垂直扫描范围/(°) | -55~15 |
| 激光雷达有效测量距离/m | 150 |
| GPS频率/Hz | 20 |
| GPS定位精度/m | 0.01 |
| IMU频率/Hz | 50 |
| IMU精度/(°) | 0.05 |
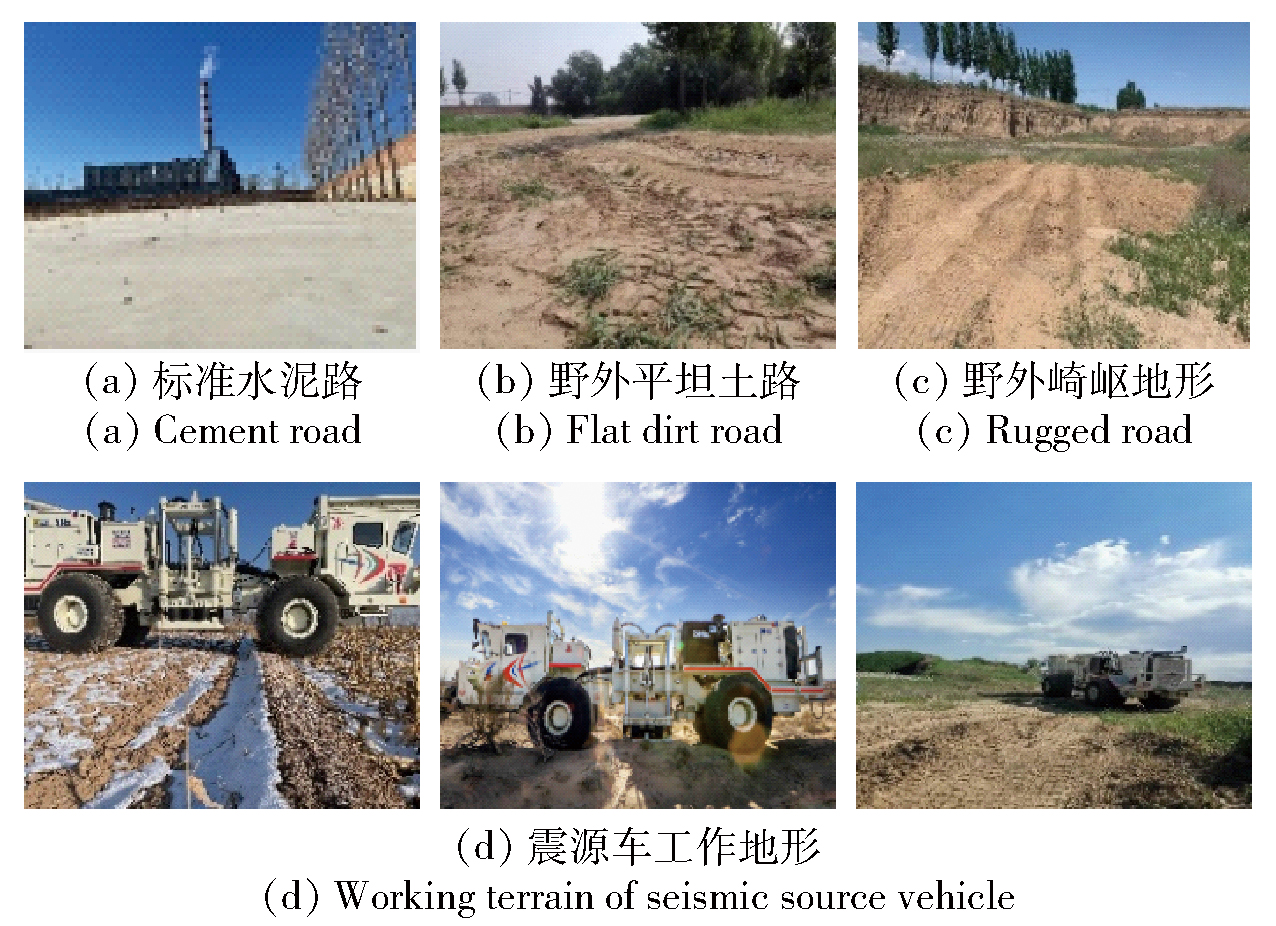
Fig.11 Composite terrain real scene collected by the laboratory

Fig.12 Scanned rugged terrain and its point cloud image
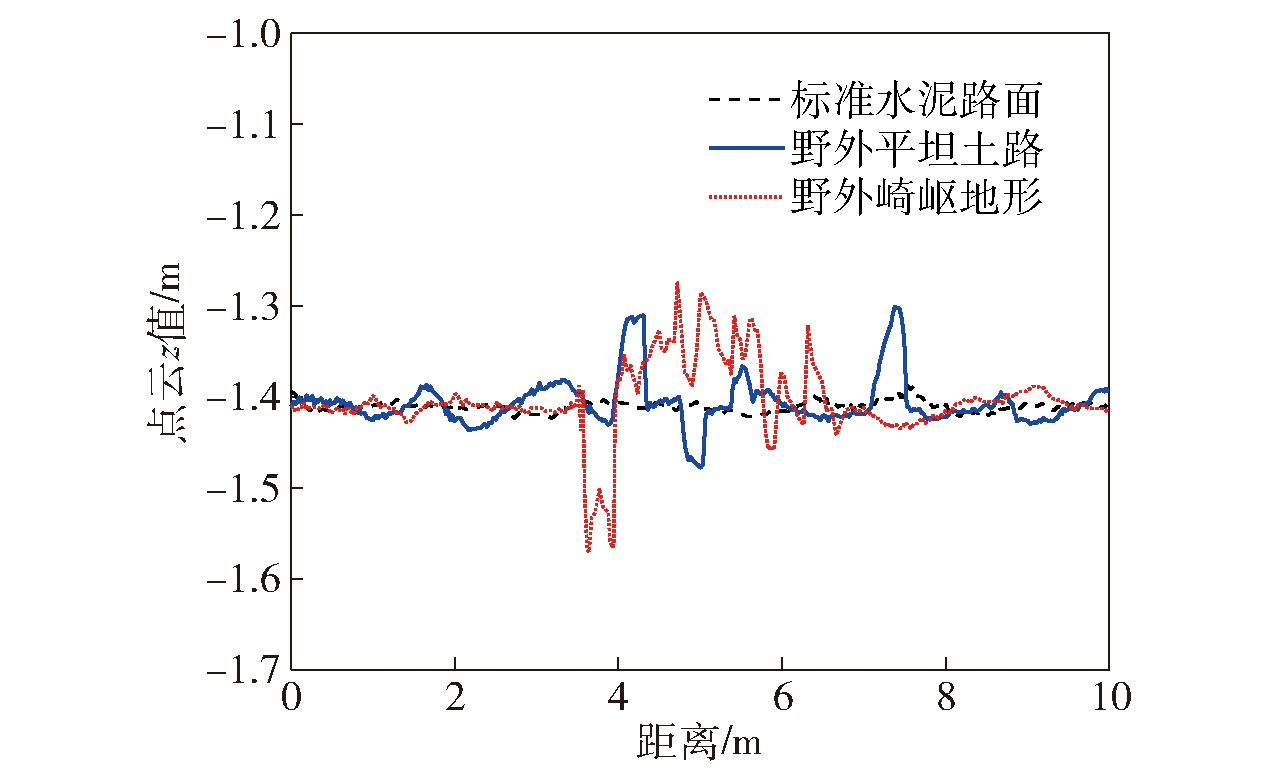
Fig.13 z-value curves of the longitudinal section point clouds of three terrains
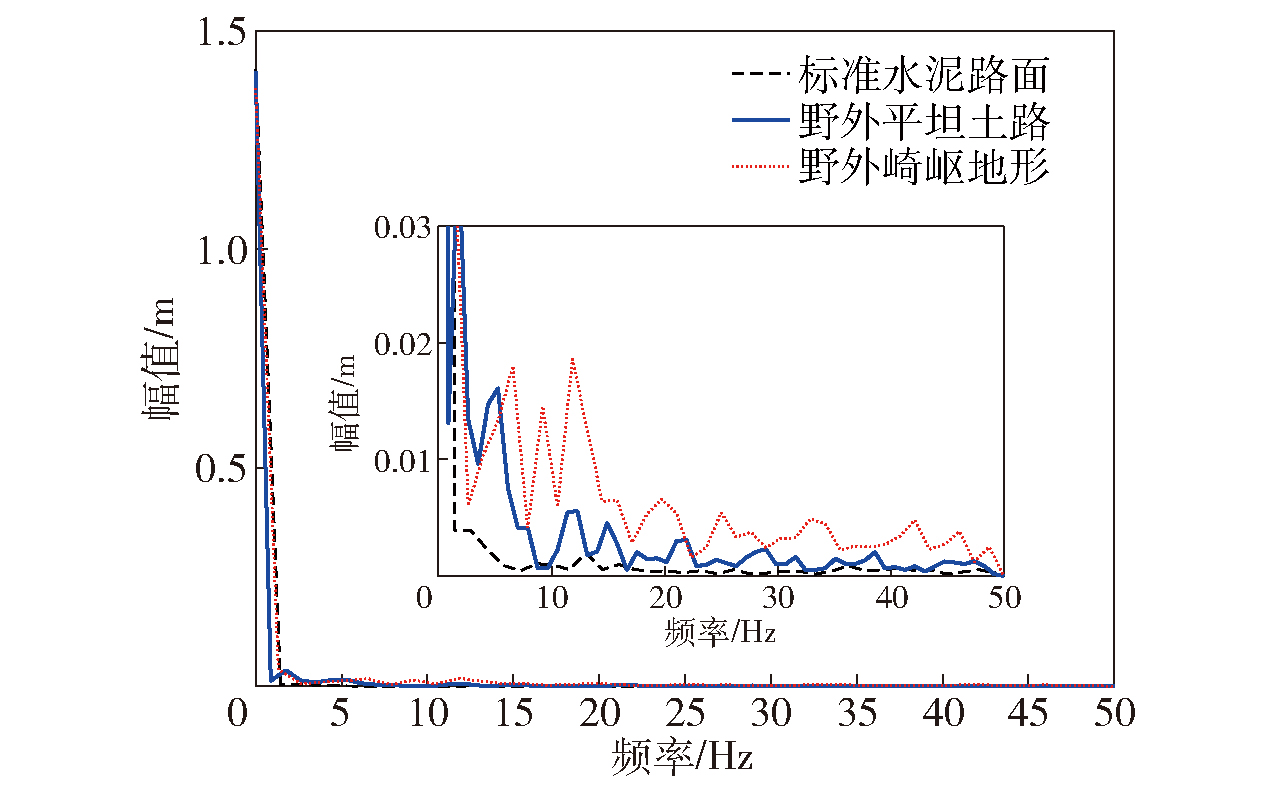
Fig.14 Amplitude-frequency characteristic curve of z value of terrain longitudinal profile point cloud
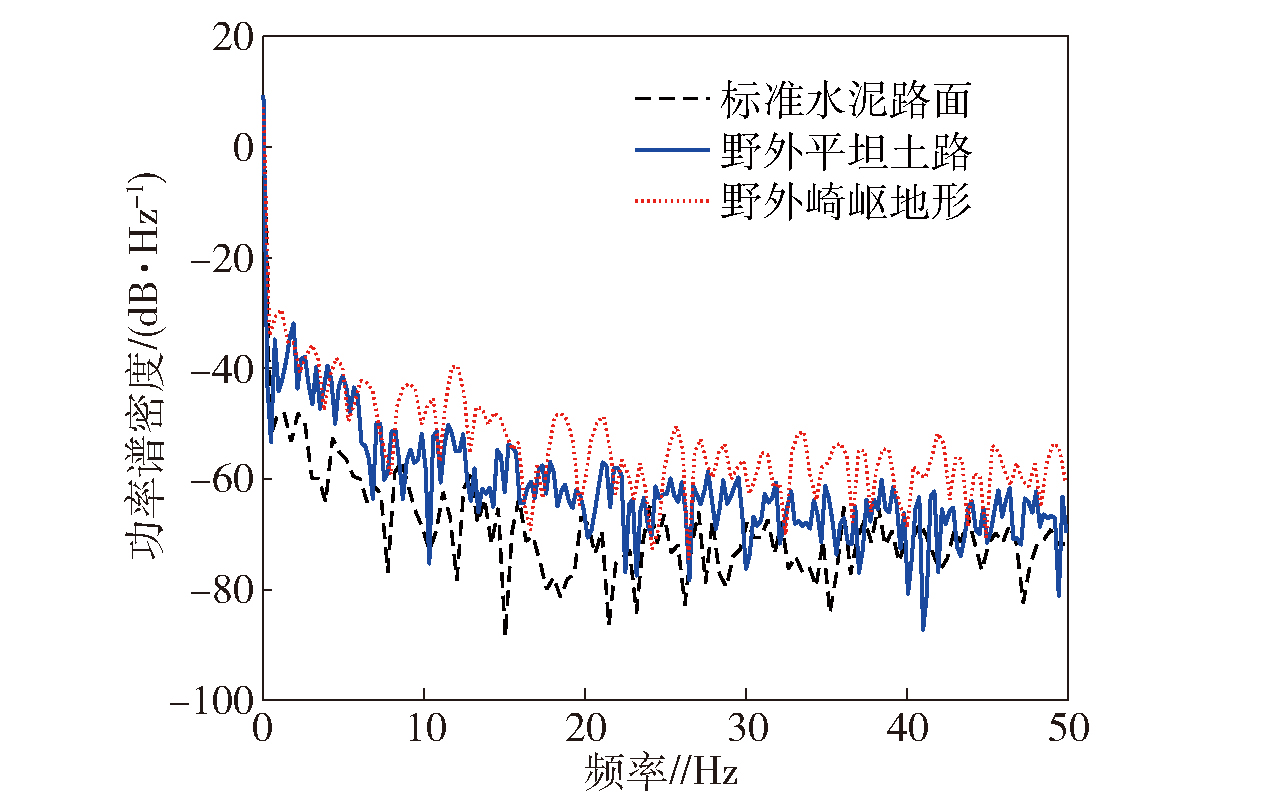
Fig.15 z-value power spectral density curve of terrain longitudinal profile point cloud
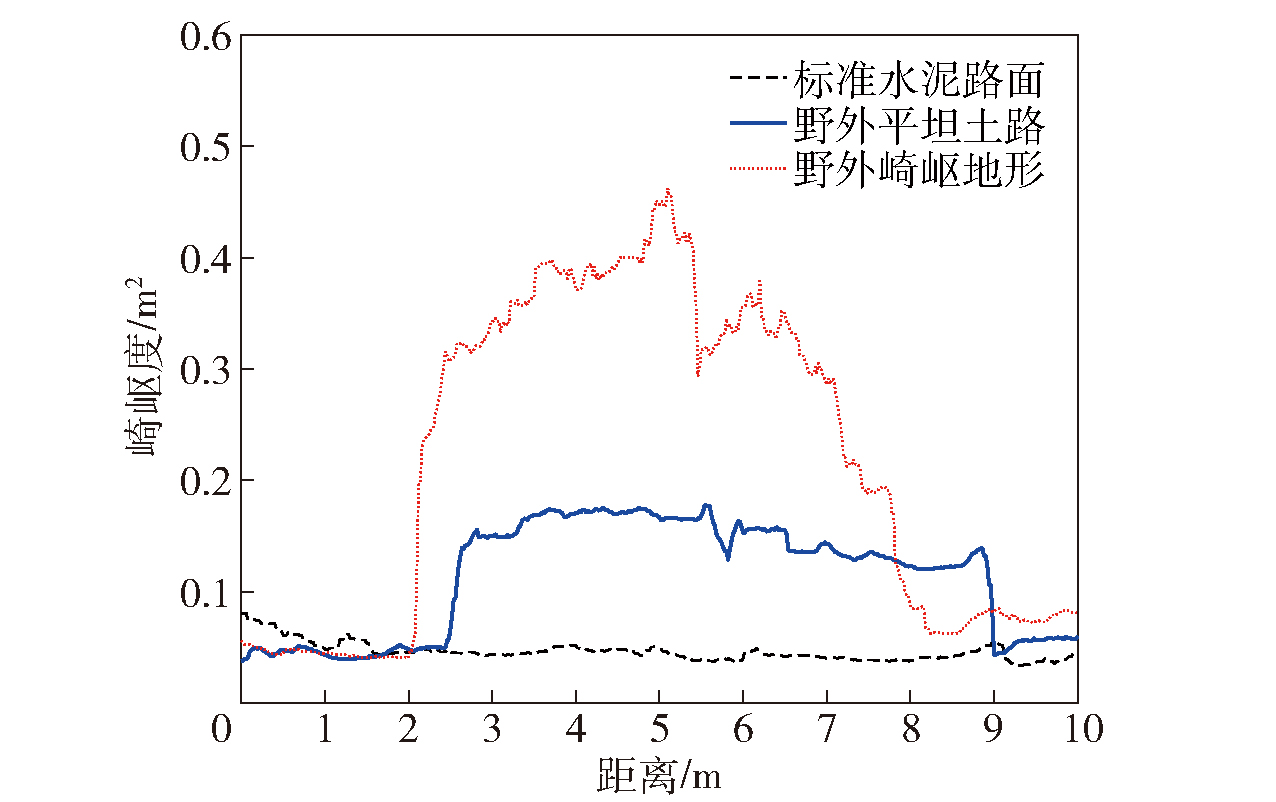
Fig.16 Change curve of terrain roughness
| 地形 | S |
|---|---|
| 平坦地形 | S<0.09 |
| 较平坦地形 | 0.09≤S≤0.17 |
| 崎岖地形 | S>0.17 |
Table 2 Ruggedness for 3 types of terrain
| 地形 | S |
|---|---|
| 平坦地形 | S<0.09 |
| 较平坦地形 | 0.09≤S≤0.17 |
| 崎岖地形 | S>0.17 |
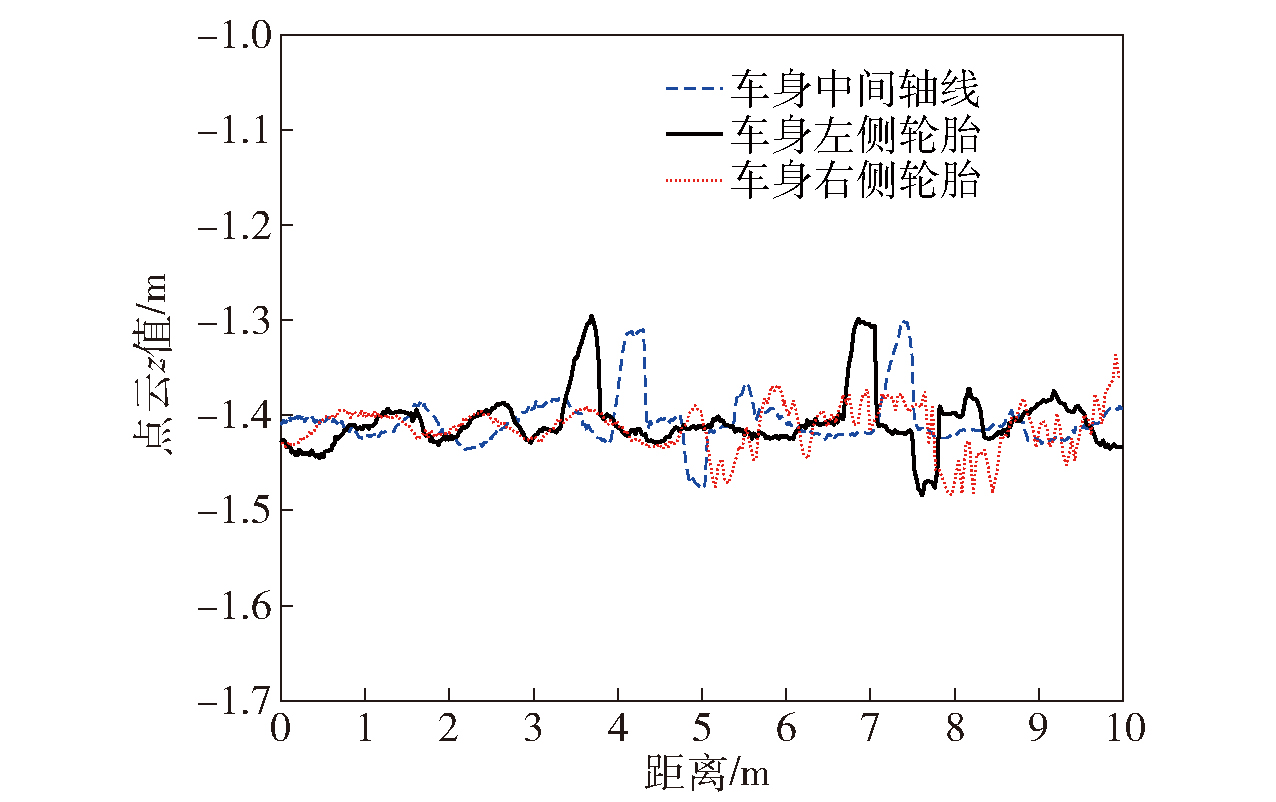
Fig.17 z-value curve of longitudinal profile point cloud of field flat dirt road

Fig.18 Variation curve of field flat dirt road roughness

Fig.19 Adaptive change curve of field flat dirt road roughness with vehicle speed
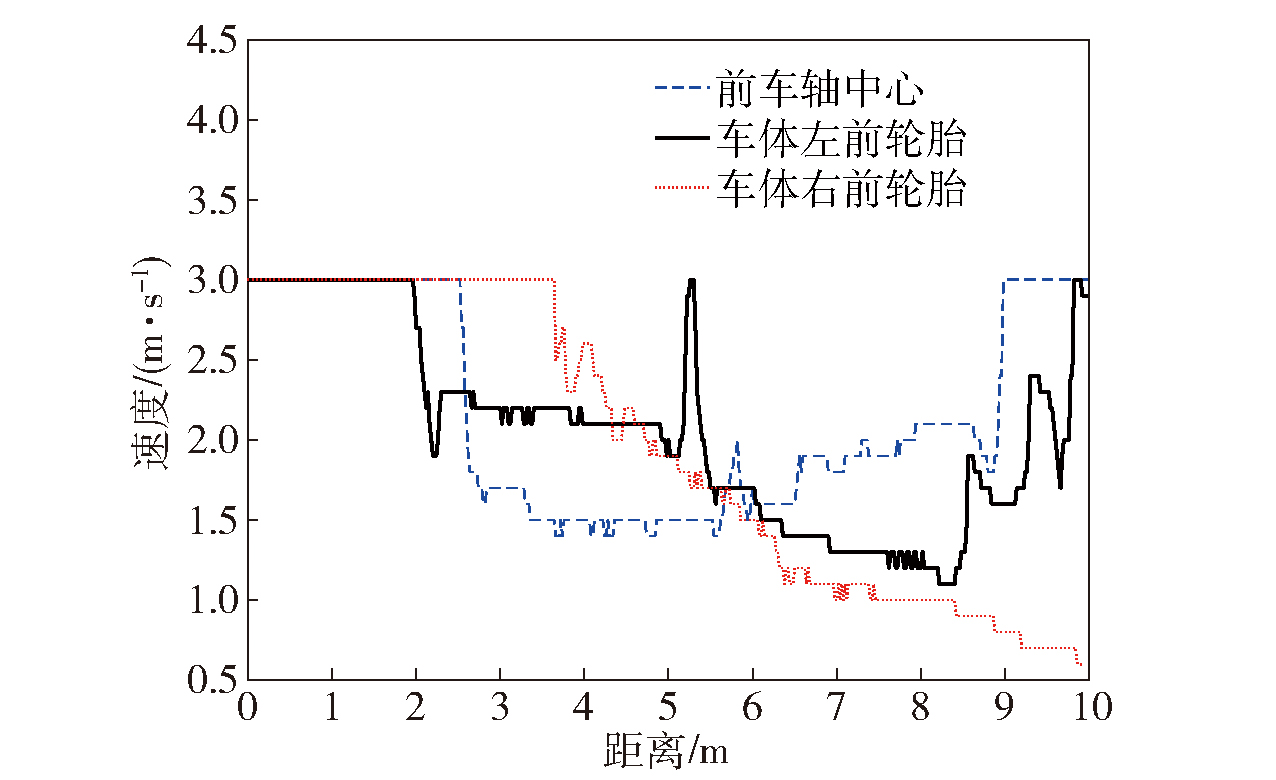
Fig.20 Adaptive variation curve of front vehicle body speed with distance
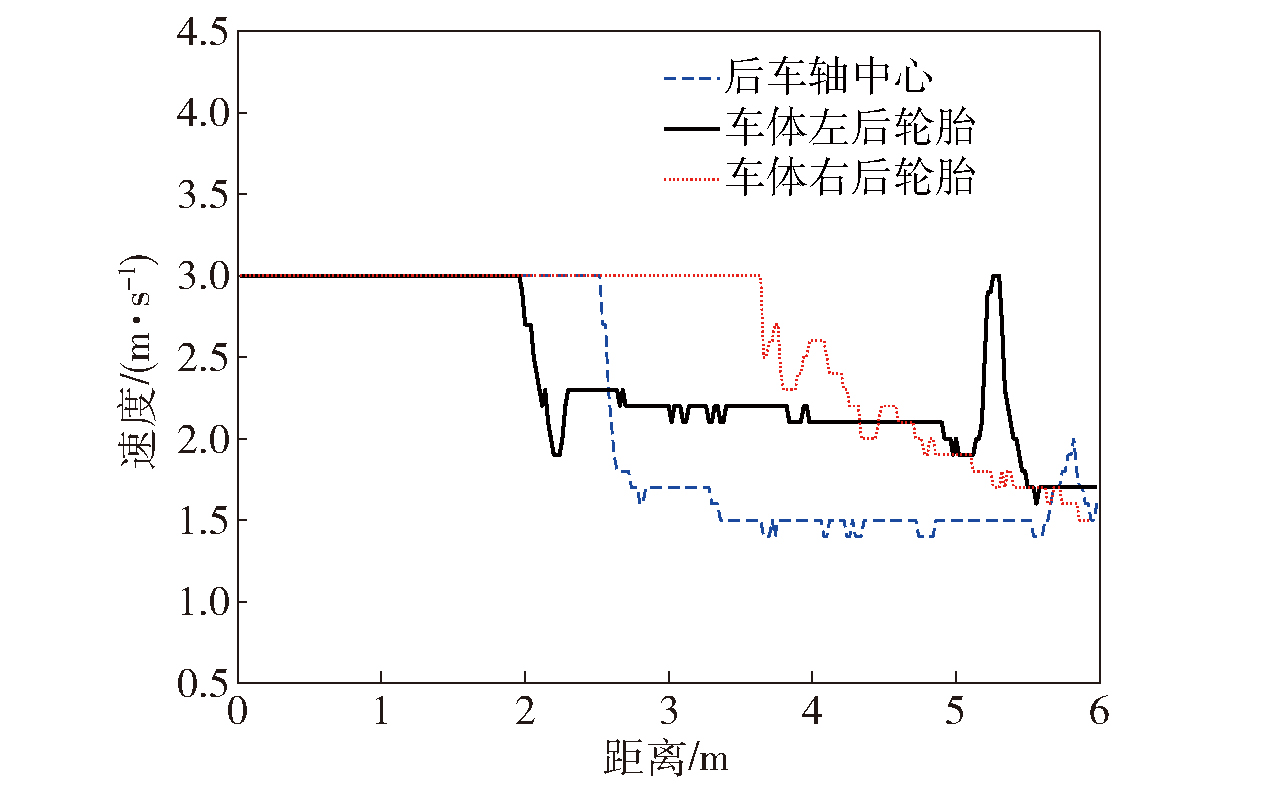
Fig.21 Adaptive variation curve of rear vehicle speed with distance
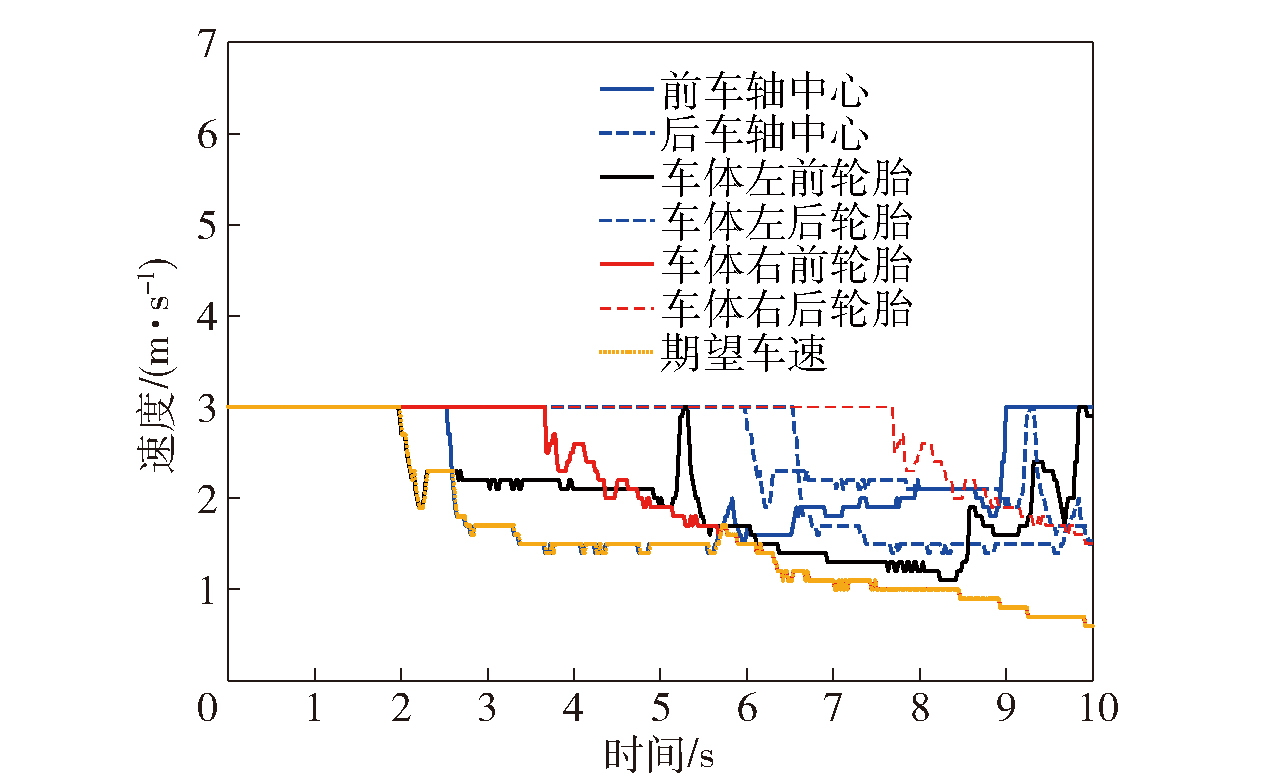
Fig.22 Speed adaptive change curve of each part of vehicle body
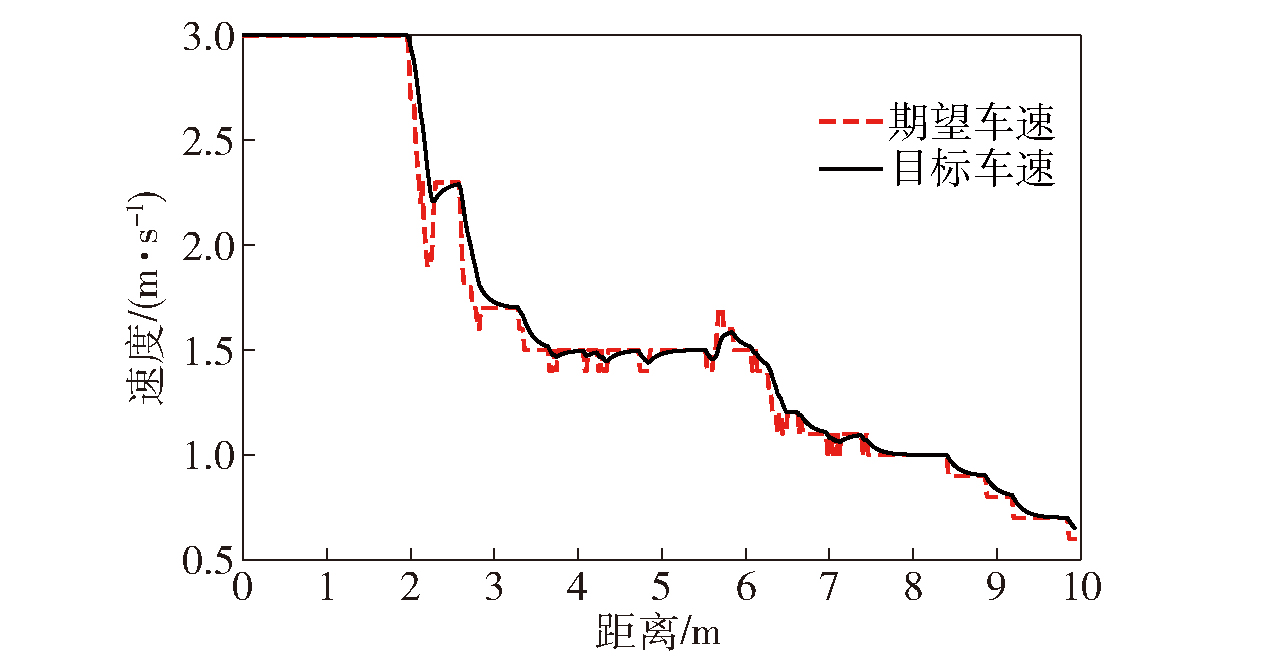
Fig.23 Adaptive change curve of target speed with distance
| [1] |
李睿, 项昌乐, 王超, 等. 自动驾驶履带车辆鲁棒自适应轨迹跟踪控制方法[J]. 兵工学报, 2021, 42(6): 1128-1137.
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
doi: 10.3969/j.issn.1000-1093.2021.06.002 |
|
| [2] |
李欢欢, 刘辉, 盖江涛, 等. 基于粒子群优化算法PID参数优化的双电机耦合驱动履带车辆转向控制[J]. 兵工学报, 2024, 45(3): 916-924.
doi: 10.12382/bgxb.2022.0788 |
|
doi: 10.12382/bgxb.2022.0788 |
|
| [3] |
袁艺, 盖江涛, 周广明, 等. 高速电驱动履带车辆操纵特性分析[J]. 兵工学报, 2023, 44(1): 203-213.
doi: 10.12382/bgxb.2022.0764 |
|
doi: 10.12382/bgxb.2022.0764 |
|
| [4] |
张伟, 刘辉, 韩立金, 等. 混合动力履带车辆机电联合制动控制[J]. 兵工学报, 2022, 43(5): 969-981.
doi: 10.12382/bgxb.2021.0256 |
|
doi: 10.12382/bgxb.2021.0256 |
|
| [5] |
卢佳兴, 刘海鸥, 关海杰, 等. 基于双参数自适应优化的无人履带车辆轨迹跟踪控制[J]. 兵工学报, 2023, 44(4): 960-971.
|
|
doi: 10.12382/bgxb.2022.0009 |
|
| [6] |
生辉, 项昌乐, 盖江涛, 等. 双侧电机耦合驱动履带车辆单侧电机故障模式下车辆安全控制[J]. 兵工学报, 2023, 44 (11): 3498-3507.
doi: 10.12382/bgxb.2022.0850 |
|
doi: 10.12382/bgxb.2022.0850 |
|
| [7] |
张杰, 马晓军, 刘春光, 等. 双侧独立电驱动履带车辆反馈线性化解耦与预测行驶控制[J]. 兵工学报, 2021, 42(4): 697-705.
|
|
doi: 10.3969/j.issn.1000-1093.2021.04.003 |
|
| [8] |
张超朋, 刘庆霄, 董昊天, 等. 无人驾驶履带车辆机电联合制动的协调控制[J]. 兵工学报, 2022, 43(11): 2727-2737.
|
|
doi: 10.12382/bgxb.2021.0784 |
|
| [9] |
刘佳, 刘海鸥, 陈慧岩, 等. 基于融合特征的无人履带车辆道路类型识别方法[J]. 兵工学报, 2023, 44(5): 1267-1276.
|
|
doi: 10.12382/bgxb.2022.0038 |
|
| [10] |
张瑞增, 龚建伟, 陈慧岩, 等. 硬质路面条件下履带车辆转向模型分析及验证[J]. 兵工学报, 2023, 44(1): 233-246.
doi: 10.12382/bgxb.2021.0849 |
|
doi: 10.12382/bgxb.2021.0849 |
|
| [11] |
|
| [12] |
|
| [13] |
张明路, 王哲, 李满宏, 等. 基于足端位置的六足机器人漫游地形感知与表征[J]. 机械工程学报, 2021, 57(19): 48-60.
doi: 10.3901/JME.2021.19.005 |
|
|
|
| [14] |
赵健, 李雅欣, 佟静, 等. 基于车辆动力学响应特征的越野地面分类方法[J]. 汽车工程, 2022, 44(6): 909-918.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
孟祥瑞. 基于多线激光雷达的移动机器人环境感知与导航控制研究[D]. 北京: 中国科学院大学, 2018.
|
|
|
|
| [19] |
张波. 基于激光雷达的非结构化地形特征提取与表征[D]. 厦门: 厦门大学, 2016.
|
|
|
|
| [20] |
刘明, 荣学文, 李贻斌, 等. 基于地形聚类分析的移动机器人速度自适应控制[J]. 吉林大学学报 (工学版), 2021, 51(4): 1496-1505.
|
|
|
|
| [21] |
|
| [22] |
|
| [23] |
余嘉星, 裴晓飞, 过学迅. 考虑路径平滑性和避撞稳定性的智能汽车弯道轨迹规划研究[J]. 汽车工程, 2022, 44(5): 656-663.
|
|
|
|
| [24] |
王猛, 陈珏璇, 邓正兴. 自动驾驶模糊神经网络速度规划方法[J]. 计算机工程与科学, 2021, 43(11): 2011.
|
|
|
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
程金龙, 冯莹, 曹毓, 等. 车载激光雷达外参数的标定方法[J]. 光电工程, 2013, 40(12): 89-94.
|
|
|
|
| [29] |
|
| [1] | SHEN Yewei, XING Shumin, YANG Maofa, ZHANG Zhe, XU Jilin, ZHAO Shuangliang, ZHANG Xianren, XU Sen. Analysis of Tensile Strength of PBT/A3/AP System Based on Power Law Equation [J]. Acta Armamentarii, 2024, 45(10): 3530-3537. |
| [2] | YANG Jing, WU Jinping, LIU Jian, WANG Yongjie, DONG Hanquan. A Semi-supervised Learning Method for Intelligent Decision Making of Submarine Maneuvering Evasion [J]. Acta Armamentarii, 2024, 45(10): 3474-3487. |
| [3] | WANG Wei, YU Zhichen, LIN Shiyao, YANG Jing, WANG Hong. Three-dimensional Leader-follower Cooperative Guidance Law for Maneuvering Targets [J]. Acta Armamentarii, 2024, 45(10): 3538-3554. |
| [4] | WANG Xiaoyue, CHEN Ke, GUO Mutian, LIU Dawei, XIONG Tao. A Method for Evaluating the Influence of Frontier Technology on Combat Effectiveness Based on Technology Correlation Model [J]. Acta Armamentarii, 2024, 45(10): 3519-3529. |
| [5] | CHEN Baihan, ZHAO Shengwei, ZOU Huihui, WANG Weiguang, DAI Xianghui, WANG Kehui. Research Progress of Overload Signal Characteristics and Processing Technologies of Penetrating Projectile [J]. Acta Armamentarii, 2024, 45(9): 2906-2928. |
| [6] | REN Xiaolei, LIU Hui, HAN Lijin, CHEN Qian, NIE Shida, XIE Jingshuo, CUI Shan. Dynamic Locomotion Control for Wheeled-legged Hybrid Platform in Complex Terrain [J]. Acta Armamentarii, 2024, 45(9): 2993-3003. |
| [7] | SUN Zhengping, YANG Guolai, LI Lei, WANG Liqun. Thermal Demagnetization Characteristics of Nd-Fe-B Used in Eddy Current Recoil Mechanism of Artillery [J]. Acta Armamentarii, 2024, 45(8): 2712-2727. |
| [8] | JIANG Xinli, ZHANG Guokai, HE Yong, YAO Jian, WANG Zhen, WU Yuxin, LIU Ju, WANG Mingyang. Afterburning Effect of Thermobaric Explosives in Confined Space [J]. Acta Armamentarii, 2024, 45(8): 2520-2530. |
| [9] | HAN Jiaxiang, BAI Qiaodong, QIU Han, ZHENG Quan, WENG Chunsheng. Influence of Combustor Configuration on Rotating Detonation Characteristics of Kerosene Pre-combustion Cracking Gas [J]. Acta Armamentarii, 2024, 45(8): 2837-2850. |
| [10] | GUO Junting, YU Yonggang. Complex Flow Field Characteristics inside Combustion Chamber During the Secondary Ignition Process of CTA [J]. Acta Armamentarii, 2024, 45(7): 2282-2293. |
| [11] | WANG Cheng, WANG Weiguo, MENG Chen, LI Qing, CHENG Yue, KONG Zihua. Simulation of Four-element Infrared Detection System Considering Missile Spinning [J]. Acta Armamentarii, 2024, 45(7): 2218-2227. |
| [12] | ZUO Mingshuo, XU Yuxin, LI Yongpeng, LI Xudong, GUO Delong, YANG Xiang. Dynamic Response of Directional Blast Relief Container Structure for Civil Aircraft under Internal Explosive Loading [J]. Acta Armamentarii, 2024, 45(7): 2383-2392. |
| [13] | ZHAO Wei, HOU Baolin, YAN Shaojun, BAO Dan, LIN Yubin. A Dynamic Model of Interval Uncertainty of Rotational Chain Shell Magazine [J]. Acta Armamentarii, 2024, 45(6): 1991-2002. |
| [14] | DING Wei, MING Zhenjun, WANG Guoxin, YAN Yan, YU Lei. Optimization Design Method of Complex Equipment System-of-systems Based on Forward Analytical Formula and MOGT Optimization Algorithm [J]. Acta Armamentarii, 2024, 45(6): 1974-1990. |
| [15] | YANG Jin, HAO Xinhong, QAO Caixia, CHEN Qile. Research on Anti-frequency Sweeping Jamming Method for Frequency-modulated Fuze Based on Sparse Recovery [J]. Acta Armamentarii, 2024, 45(6): 2044-2053. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||