
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (5): 1403-1413.doi: 10.12382/bgxb.2022.1267
Previous Articles Next Articles
YU Di1,*( ), WANG Yajie1, ZHAO Bo2, LIU Qiong1
), WANG Yajie1, ZHAO Bo2, LIU Qiong1
Received:2022-12-17
Online:2023-04-06
Contact:
YU Di
YU Di, WANG Yajie, ZHAO Bo, LIU Qiong. Fixed-Time Tracking Control of Multi-agent Systems under Dynamic Event-Triggering Mechanism[J]. Acta Armamentarii, 2023, 44(5): 1403-1413.
Add to citation manager EndNote|Ris|BibTeX
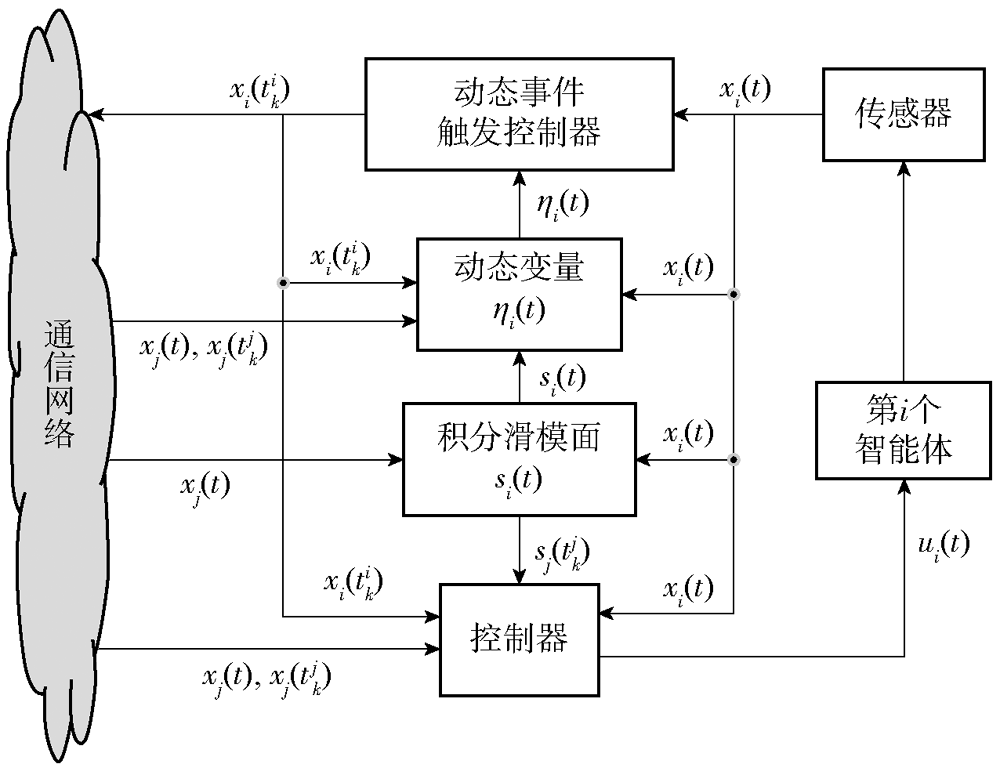
Fig.1 Diagram of control scheme
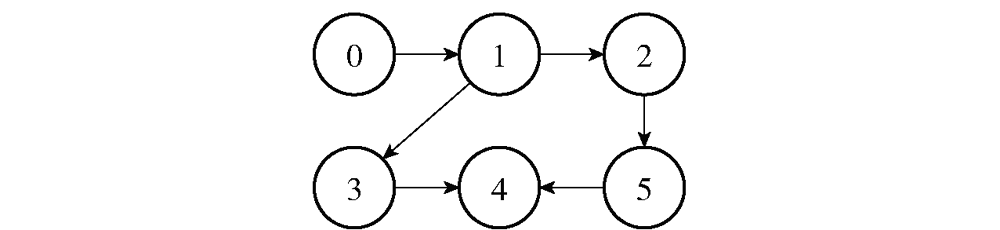
Fig.2 Network topology
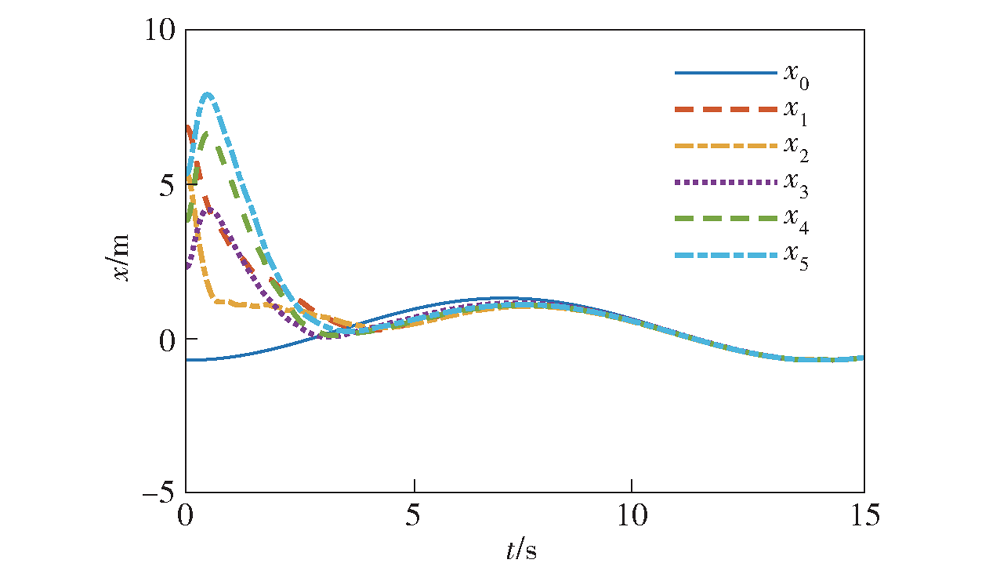
Fig.3 Position trajectories of agents
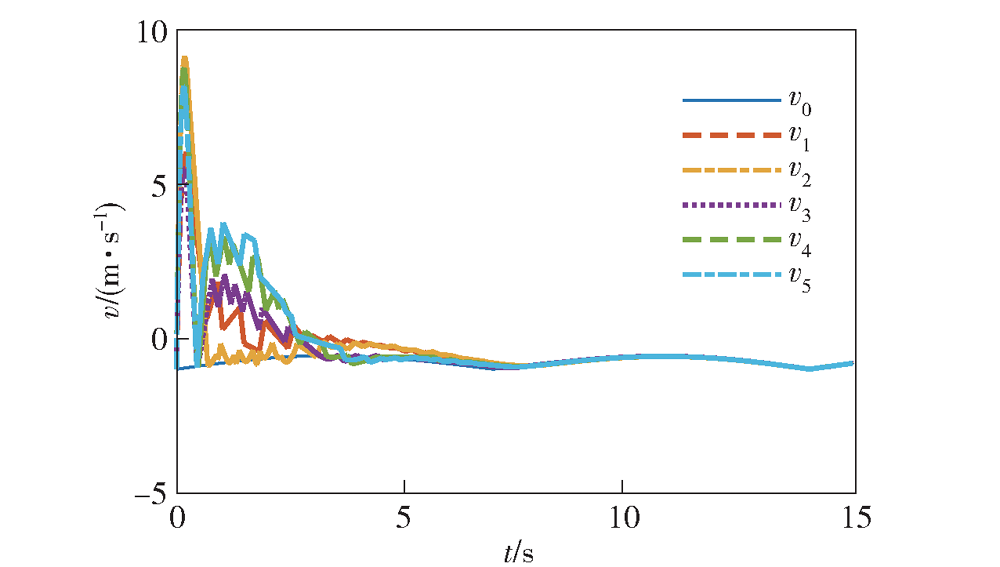
Fig.4 Velocity trajectories of agents
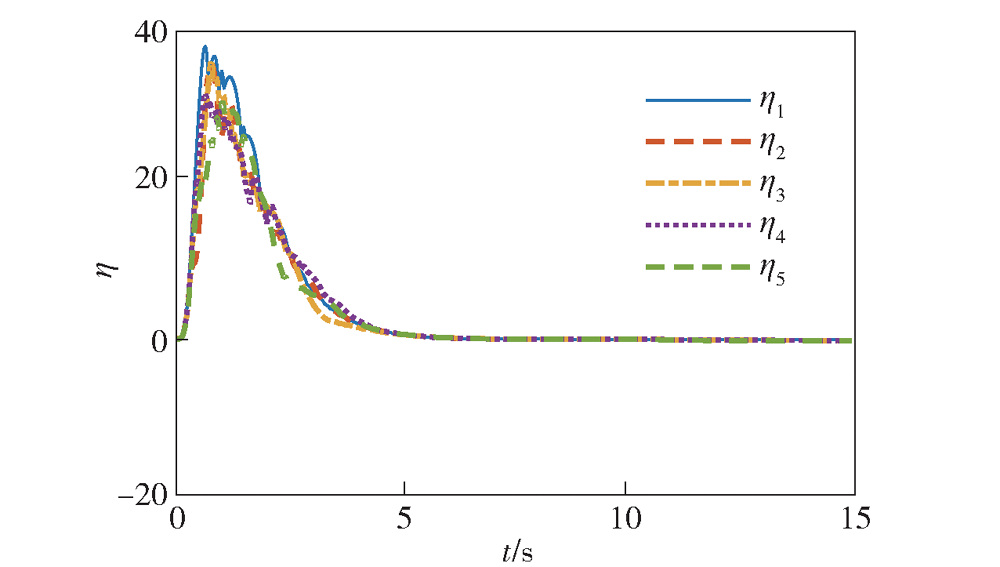
Fig.5 Curves of dynamic auxiliary variables
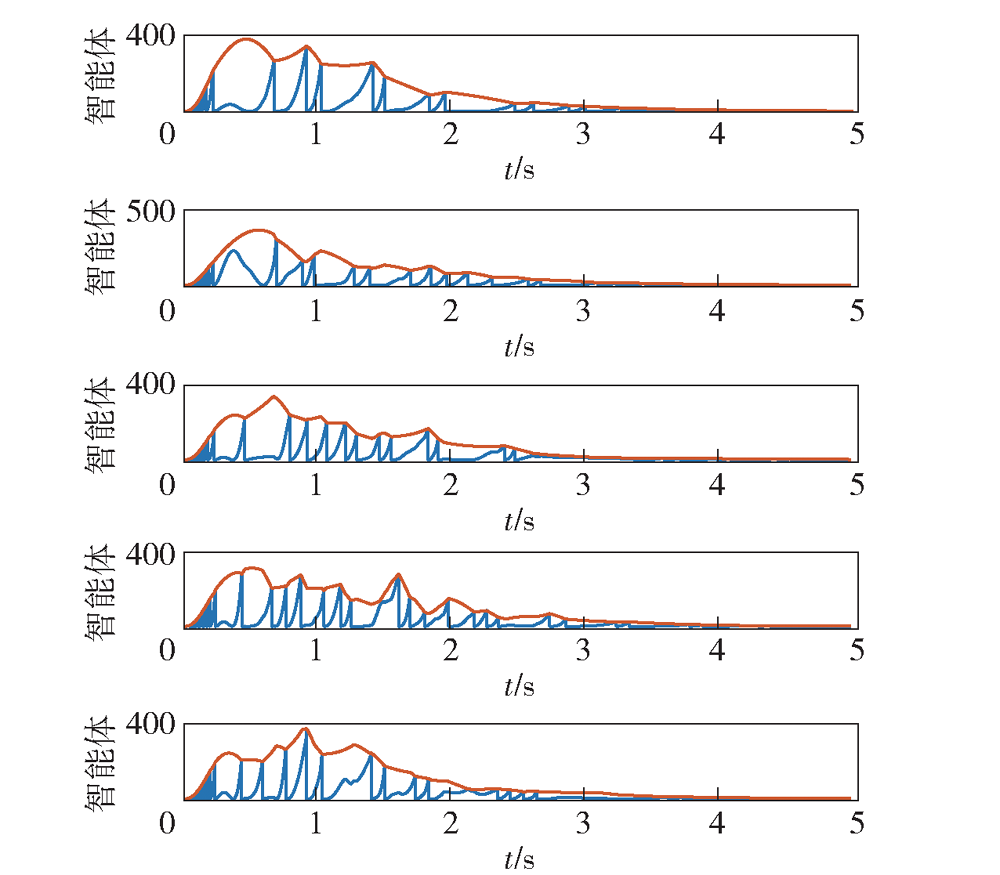
Fig.6 Curves of errors and trigger threshold
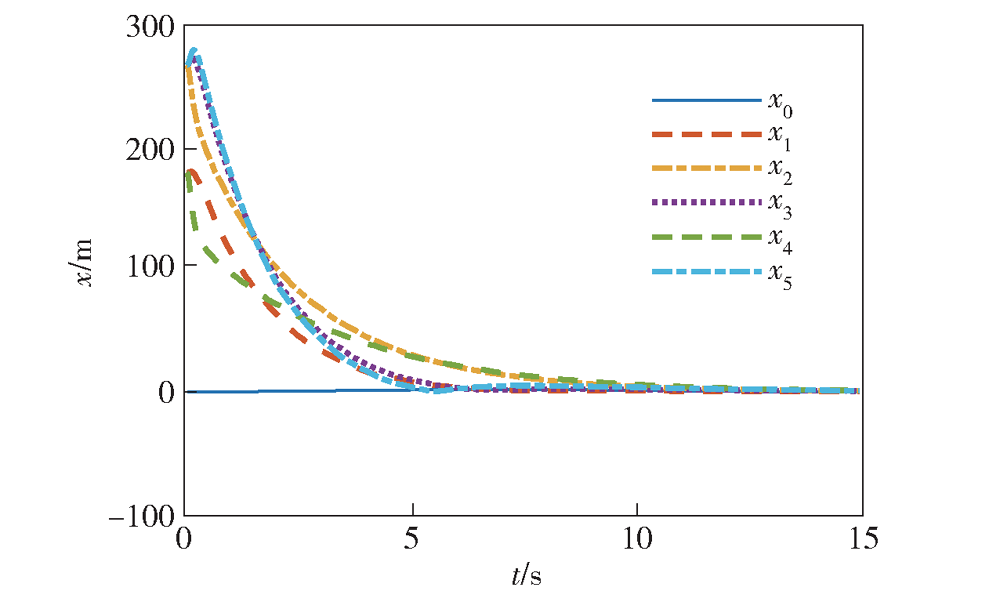
Fig.7 Position trajectories of agents with large initial values
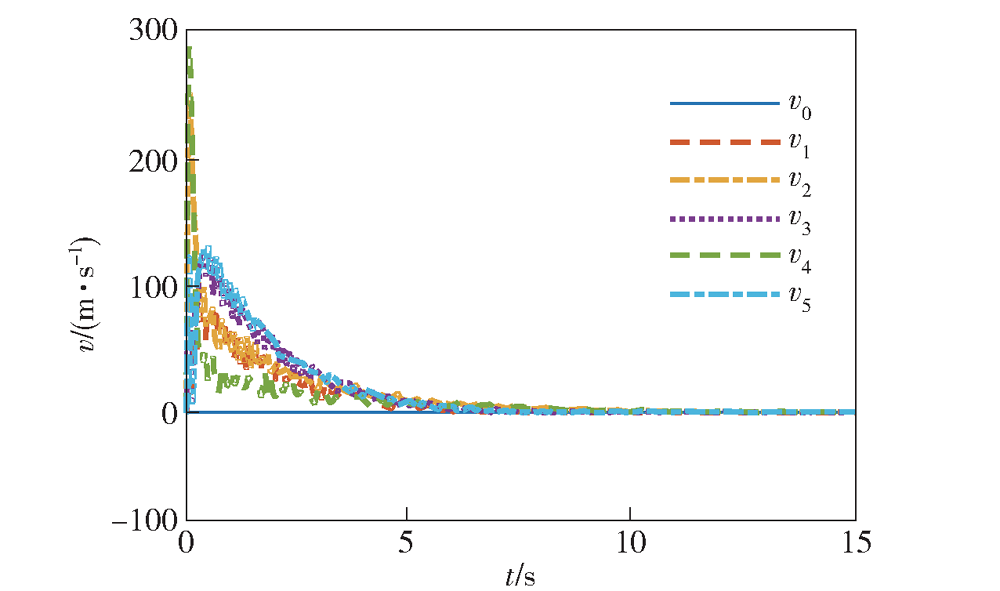
Fig.8 Velocity trajectories of agents with large initial values
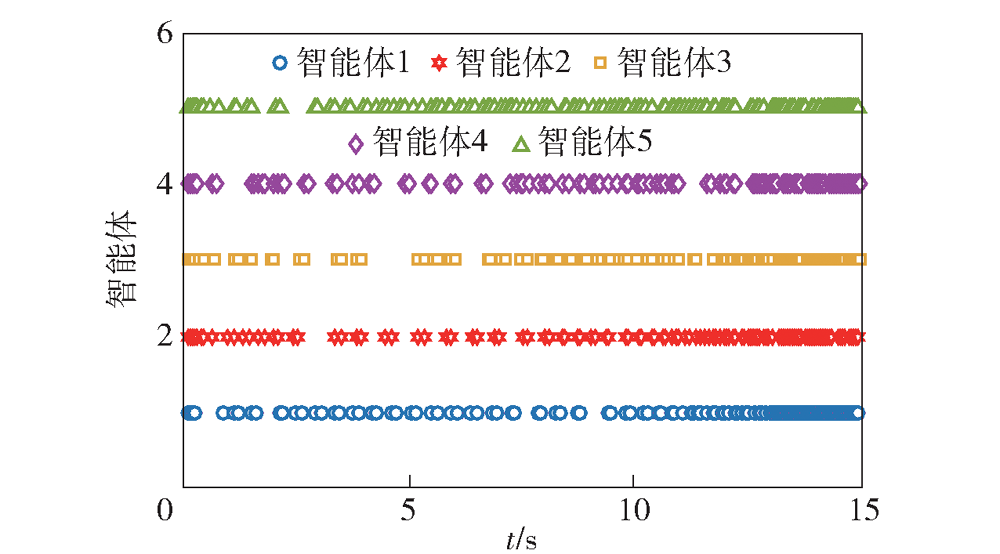
Fig.9 Trigger time of agents under the dynamic triggering mechanism
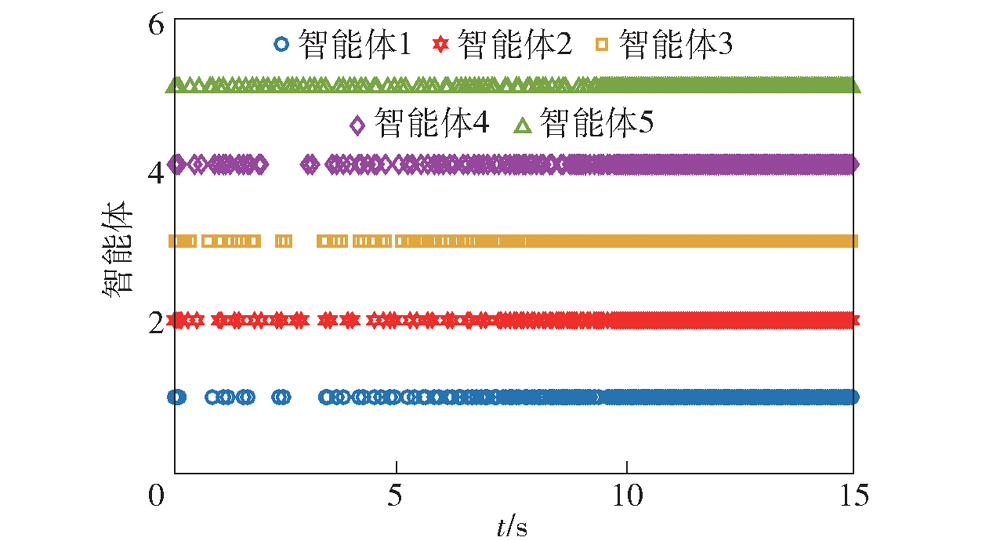
Fig.10 Trigger time of agents under the static triggering mechanism
| 动态触发和 静态触发 | 智能体 | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 动态触发 | 179 | 159 | 148 | 191 | 206 |
| 静态触发 | 5129 | 5190 | 5191 | 5229 | 5208 |
Table 1 Comparison of triggering frequency of the dynamic and static triggering mechanisms
| 动态触发和 静态触发 | 智能体 | ||||
|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | |
| 动态触发 | 179 | 159 | 148 | 191 | 206 |
| 静态触发 | 5129 | 5190 | 5191 | 5229 | 5208 |
| [1] |
周绍磊, 赵学远, 祁亚辉, 等. 有向切换拓扑条件下考虑暂态响应的多智能体H∞一致性控制[J]. 兵工学报, 2020, 41(2):356-365.
doi: 10.3969/j.issn.1000-1093.2020.02.018 |
|
|
|
| [2] |
doi: 10.1109/TCYB.2019.2963087 pmid: 31995513 |
| [3] |
doi: 10.1016/j.sysconle.2014.06.007 URL |
| [4] |
doi: 10.1137/S0363012997321358 URL |
| [5] |
doi: 10.1016/j.automatica.2008.07.013 URL |
| [6] |
doi: 10.1109/TAC.2011.2179869 URL |
| [7] |
doi: 10.1007/s12555-019-1005-5 |
| [8] |
doi: 10.3390/e24010001 URL |
| [9] |
doi: 10.1109/TAC.2021.3131549 URL |
| [10] |
|
| [11] |
|
| [12] |
doi: 10.1109/TNSE.6488902 URL |
| [13] |
doi: 10.1080/00207179.2022.2085179 |
| [14] |
|
| [15] |
doi: 10.1016/j.jfranklin.2019.10.035 URL |
| [16] |
|
| [17] |
|
| [18] |
doi: 10.1002/rnc.v31.1 URL |
| [19] |
doi: 10.3390/e23010001 URL |
| [20] |
doi: 10.1016/j.jfranklin.2019.12.021 URL |
| [21] |
陈世明, 邵赛. 基于事件触发非线性多智能体系统的固定时间一致性[J]. 控制理论与应用, 2019, 36(10):1606-1614.
|
|
|
|
| [22] |
|
| [23] |
doi: 10.1049/cth2.v14.16 URL |
| [24] |
doi: 10.1109/TIE.2017.2701778 URL |
| [25] |
doi: 10.1080/00207179.2021.1989045 |
| [26] |
doi: 10.1109/JAS.2022.105503 URL |
| [27] |
孙梦薇, 任璐, 刘剑, 等. 切换拓扑下动态事件触发多智能体系统固定时间一致性[J]. 自动化学报, 2022, 48(4):1-11.
|
|
|
|
| [28] |
doi: 10.1109/TCSI.2007.895383 URL |
| [29] |
doi: 10.1016/j.automatica.2013.03.005 URL |
| [1] | WANG Yuchen, WANG Wei, LIN Shiyao, YANG Jing, WANG Shaolong, YIN Zhao. Three-dimensional Adaptive Sliding Mode Cooperative Guidance Law with Impact Time and Angle Constraints [J]. Acta Armamentarii, 2023, 44(9): 2778-2790. |
| [2] | KONG Guojie, FENG Shi, YU Huilong, JU Zhiyang, GONG Jianwei. A Review on Cooperative Motion Planning of Unmanned Vehicles [J]. Acta Armamentarii, 2023, 44(1): 11-26. |
| [3] | ZHANG Yao, GUO Jie, TANG Sheng-jing, SHANG Wei, ZHANG Hao-qiang. A Novel Sliding Mode Guidance Law with Impact Angle Constraint for Maneuvering Target Interception [J]. Acta Armamentarii, 2015, 36(8): 1443-1457. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||