
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 223-234.doi: 10.12382/bgxb.2023.0664
Special Issue: 群体协同与自主技术
ZHANG Jixiong1,2, LI Zonggang1,2,*( ), NING Xiaogang1,2, CHEN Yinjuan1,2
), NING Xiaogang1,2, CHEN Yinjuan1,2
Received:2023-07-15
Online:2024-01-10
Contact:
LI Zonggang
CLC Number:
ZHANG Jixiong, LI Zonggang, NING Xiaogang, CHEN Yinjuan. Fully Distributed Consensus Control of General Linear Multi-agent System Based on Dynamic Event-trigger[J]. Acta Armamentarii, 2023, 44(S2): 223-234.
Add to citation manager EndNote|Ris|BibTeX
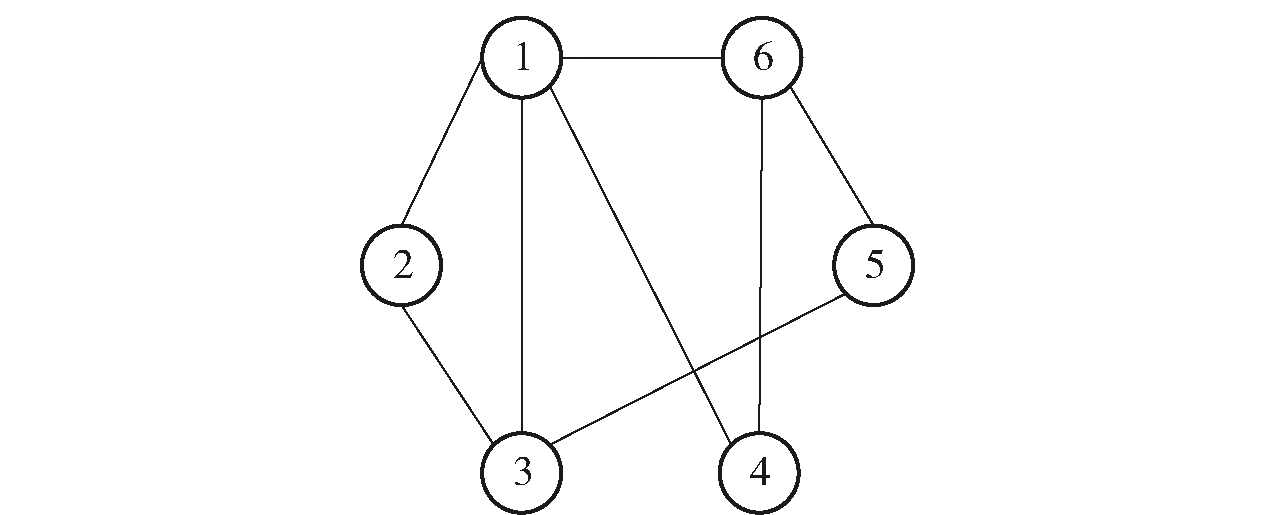
Fig.1 Undirected communication topology among agents
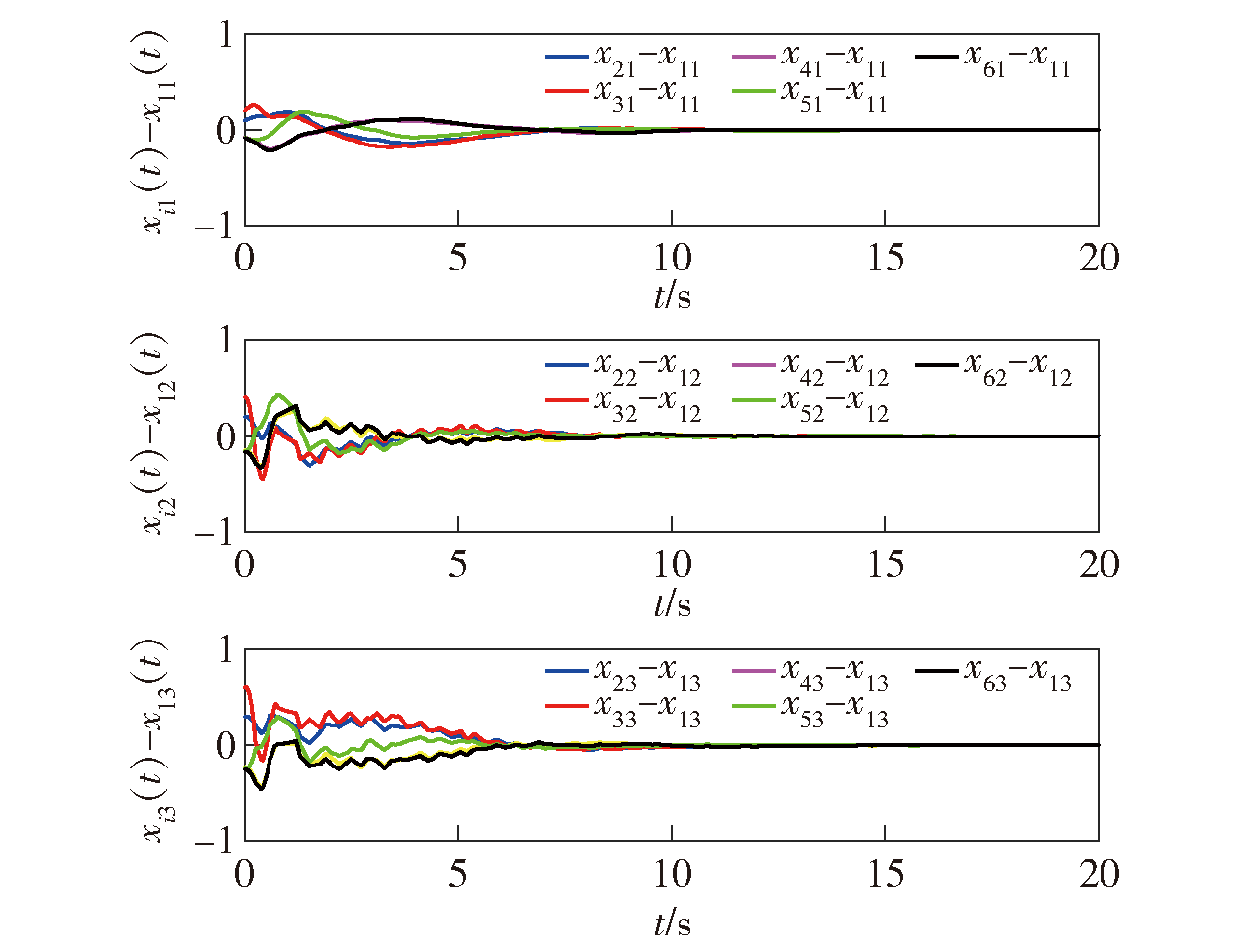
Fig.2 Consensus error

Fig.3 Time-varying coupling weight
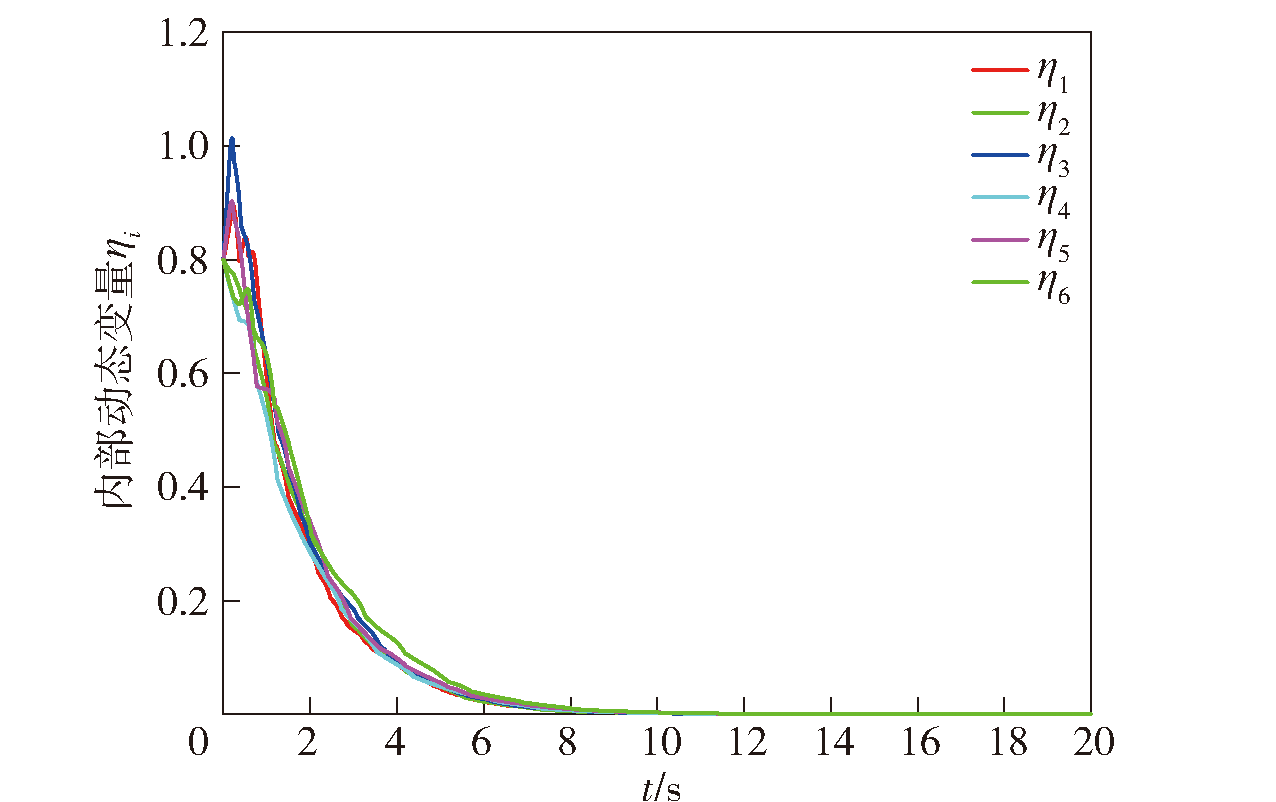
Fig.4 Internal dynamic variables
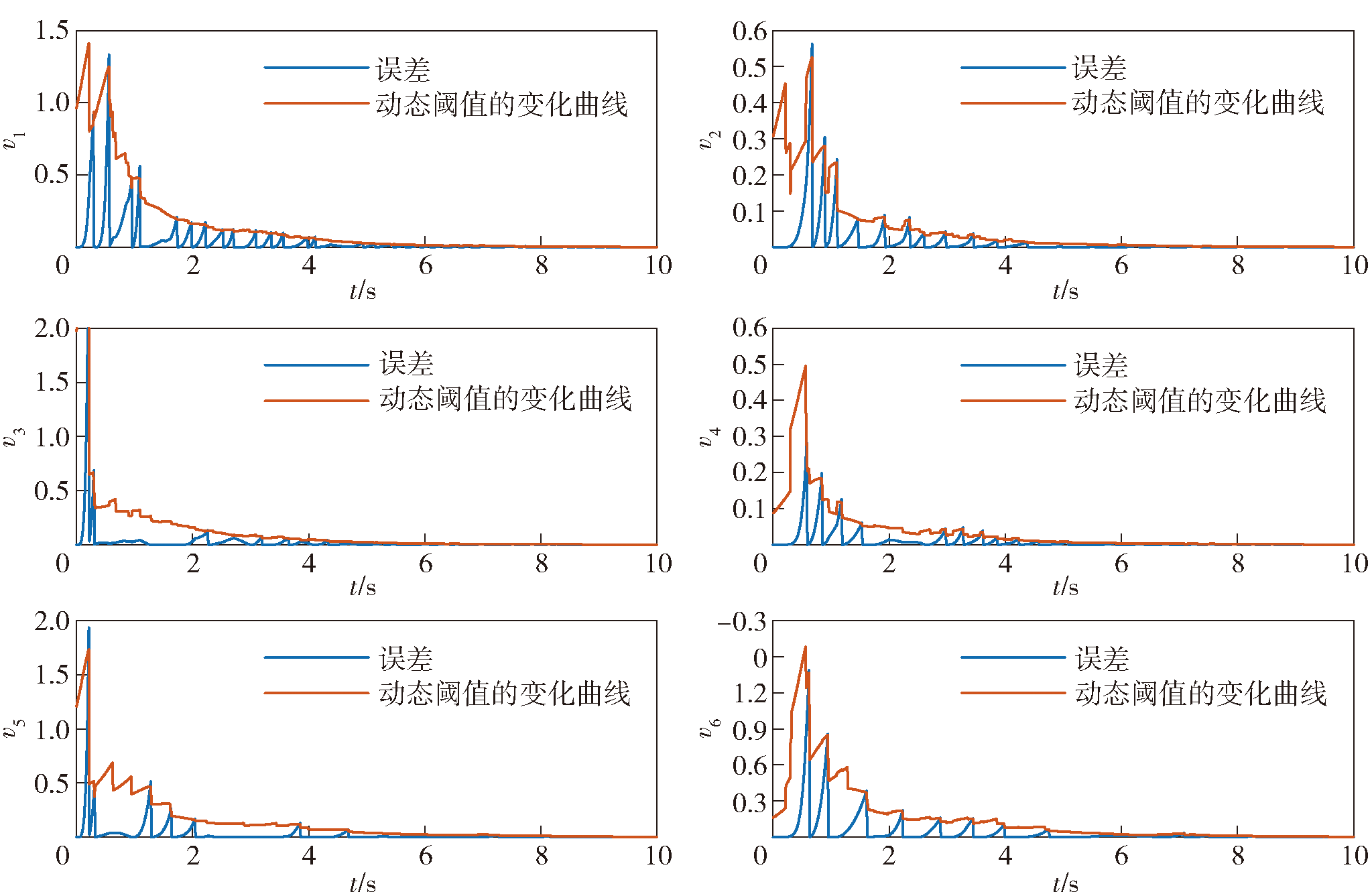
Fig.5 Curves of error and dynamic trigger threshold
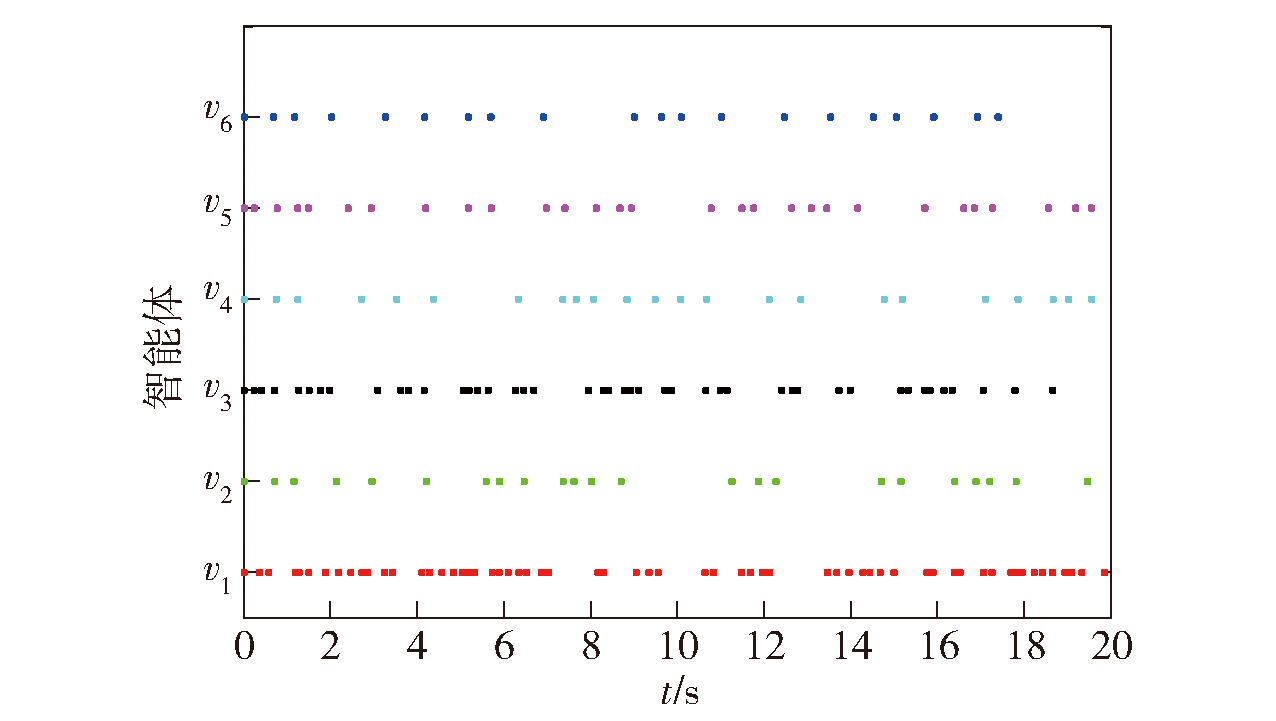
Fig.6 Trigger-time of each agent under dynamic event-triggered mechanism
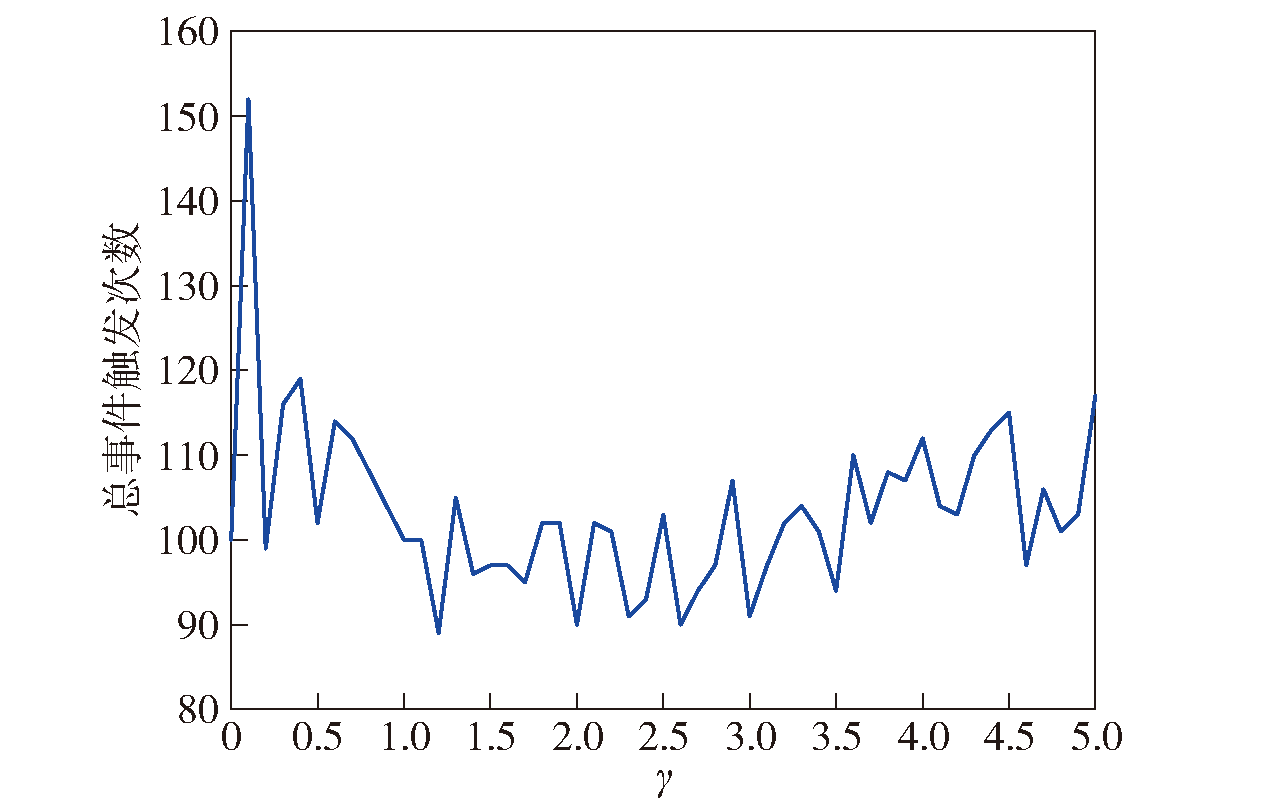
Fig.7 Total event trigger times vs. parameter γ
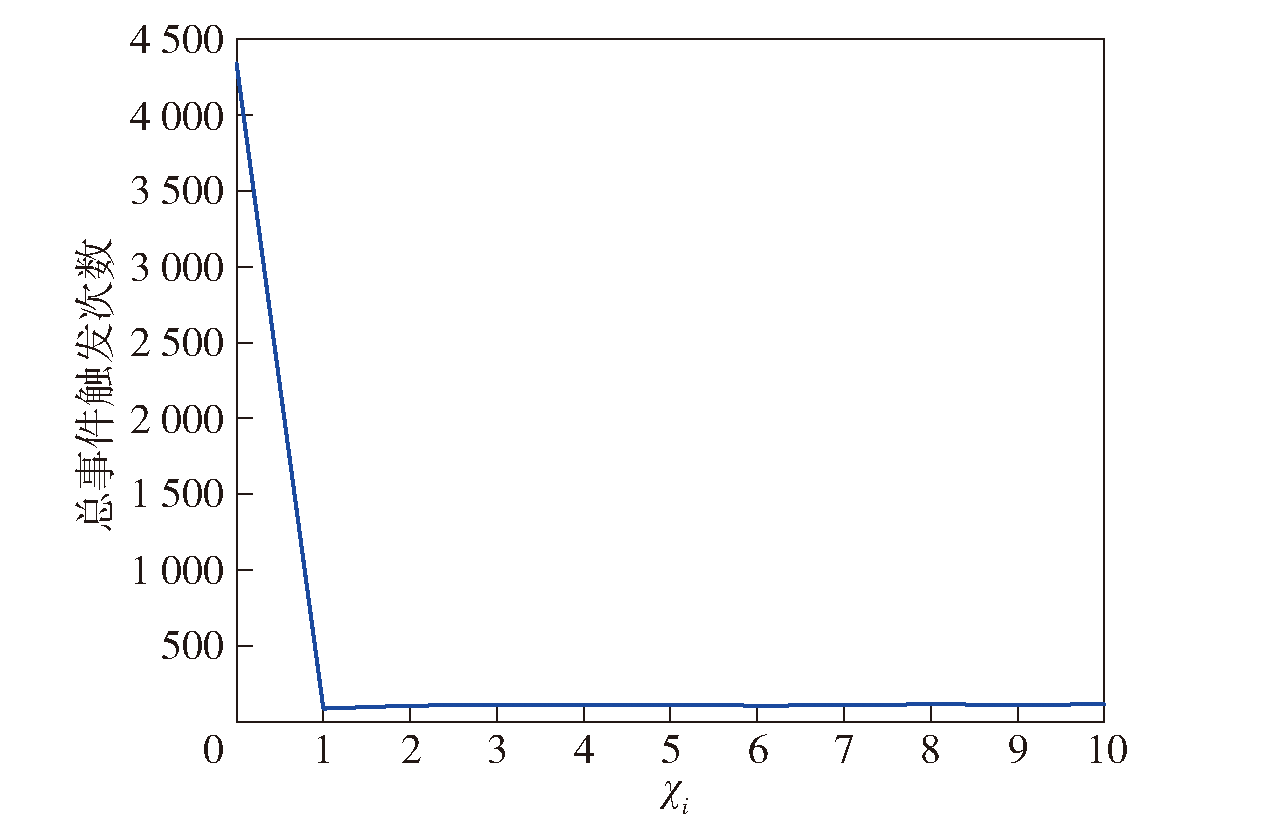
Fig.8 Total event trigger times vs. parameter χi
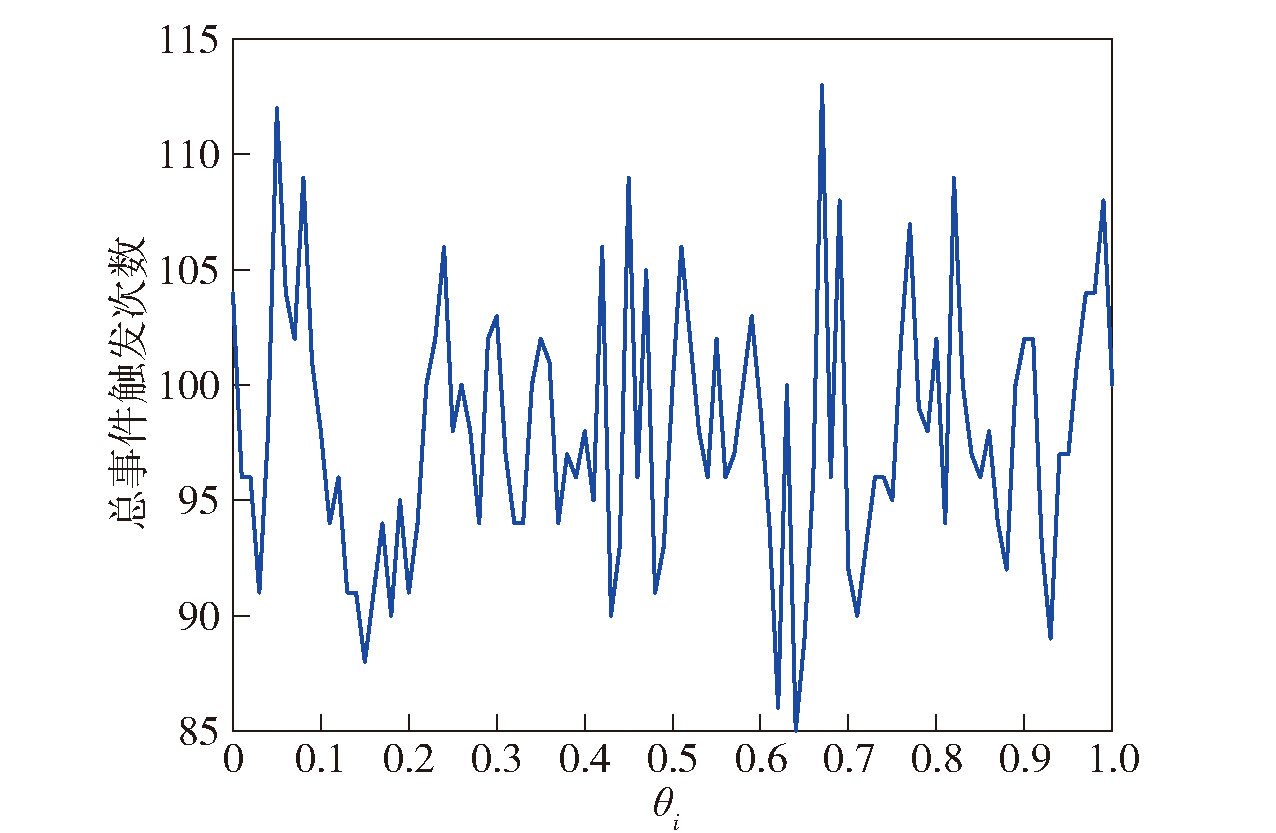
Fig.9 Total event trigger times vs. parameter θi
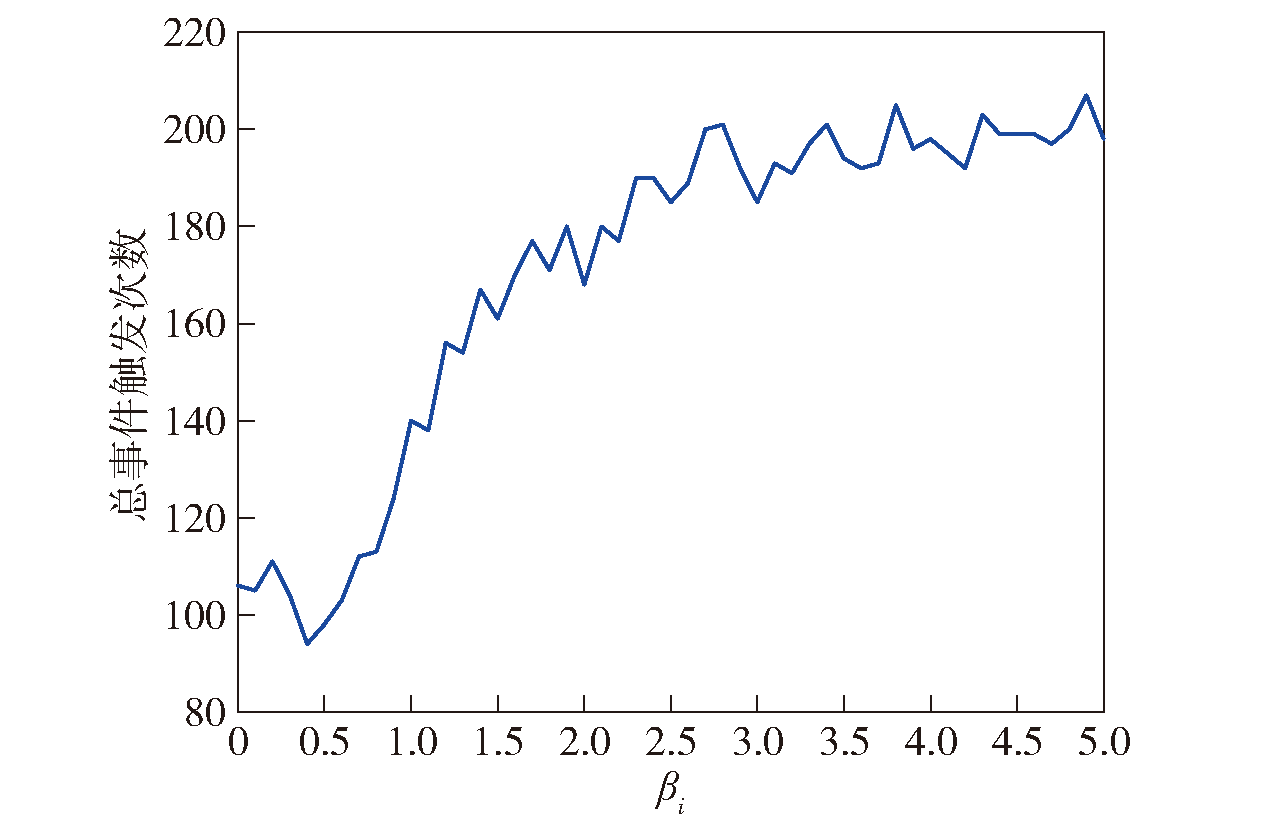
Fig.10 Total event trigger times vs. parameter βi

Fig.11 Changing curve of the total number of event triggers with the initial value of internal dynamic variable ηi(0)
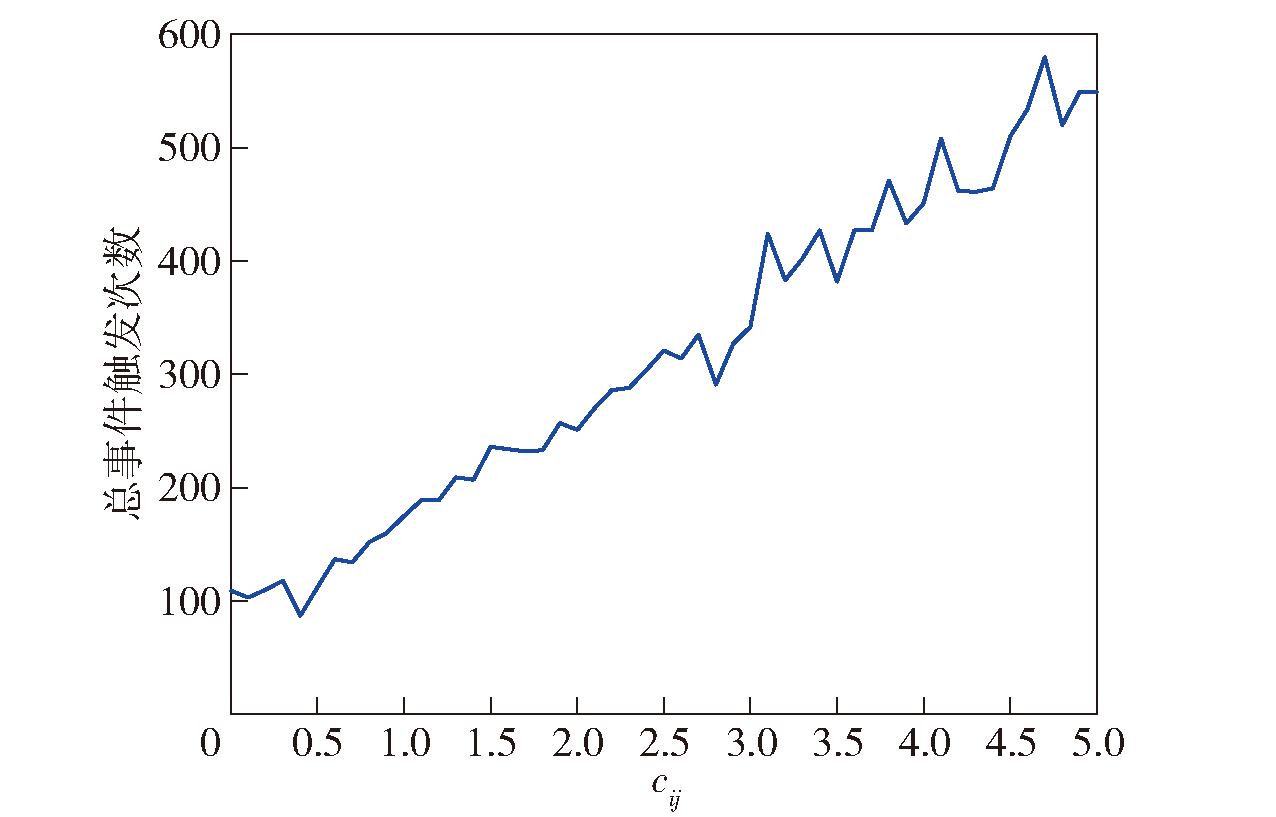
Fig.12 Changing curve of the total number of event triggers with the initial value of adaptive parameter cij(0)
| ETC算法来源 | 智能体 | ||||||
|---|---|---|---|---|---|---|---|
| v1 | v2 | v3 | v4 | v5 | v6 | 总和 | |
| 文献[18] | 125 | 177 | 158 | 167 | 109 | 134 | 870 |
| 文献[21] | 81 | 153 | 238 | 177 | 91 | 102 | 842 |
| 文献[22] | 99 | 54 | 124 | 58 | 45 | 63 | 443 |
| 本文算法 | 52 | 24 | 40 | 20 | 24 | 24 | 184 |
Table 1 Comparison of trigger times
| ETC算法来源 | 智能体 | ||||||
|---|---|---|---|---|---|---|---|
| v1 | v2 | v3 | v4 | v5 | v6 | 总和 | |
| 文献[18] | 125 | 177 | 158 | 167 | 109 | 134 | 870 |
| 文献[21] | 81 | 153 | 238 | 177 | 91 | 102 | 842 |
| 文献[22] | 99 | 54 | 124 | 58 | 45 | 63 | 443 |
| 本文算法 | 52 | 24 | 40 | 20 | 24 | 24 | 184 |
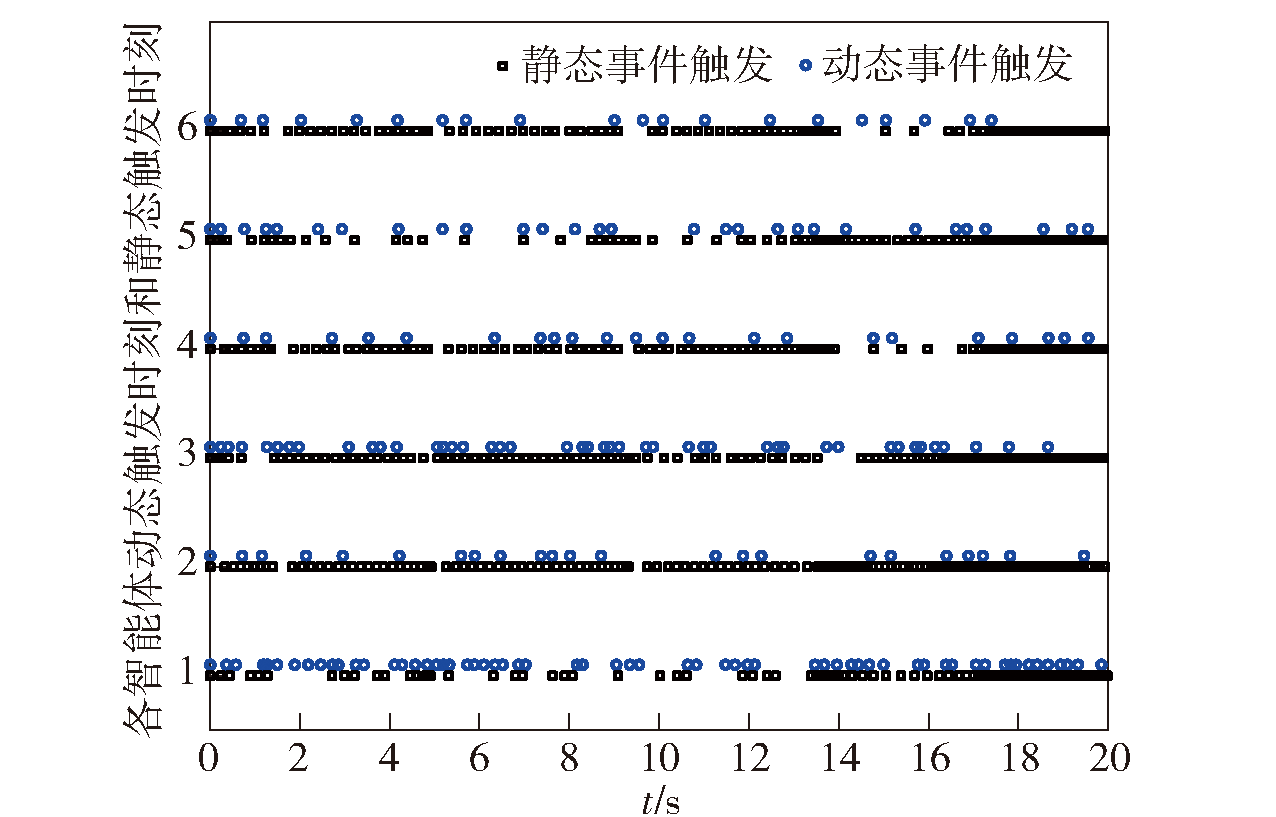
Fig.13 Trigger-time of each agent under dynamic and static trigger mechanisms
| ETC算法来源 | 智能体 | ||||||
|---|---|---|---|---|---|---|---|
| v1 | v2 | v3 | v4 | v5 | v6 | 总和 | |
| 文献[18]ETC | 125 | 177 | 158 | 167 | 109 | 134 | 870 |
| 本文算法 | 52 | 24 | 40 | 20 | 24 | 24 | 184 |
Table 2 omparison of communication times
| ETC算法来源 | 智能体 | ||||||
|---|---|---|---|---|---|---|---|
| v1 | v2 | v3 | v4 | v5 | v6 | 总和 | |
| 文献[18]ETC | 125 | 177 | 158 | 167 | 109 | 134 | 870 |
| 本文算法 | 52 | 24 | 40 | 20 | 24 | 24 | 184 |
| [1] |
于镝, 王亚洁, 赵博, 等. 动态事件触发机制下多智能体系统固定时间跟踪[J]. 兵工学报, 2023, 44(5):1403-1413.
|
|
doi: 10.12382/bgxb.2022.1267 |
|
| [2] |
张栋, 马苏慧, 吕石, 等. 多智能体系统事件触发一致性研究综述[J]. 北京理工大学学报, 2022, 42(10):1059-1072.
|
|
|
|
| [3] |
|
| [4] |
doi: 10.1016/S1474-6670(17)56852-4 URL |
| [5] |
doi: 10.1109/TCYB.6221036 URL |
| [6] |
doi: 10.1109/TAC.1959.1104845 URL |
| [7] |
doi: 10.1016/j.ins.2018.12.037 URL |
| [8] |
|
| [9] |
doi: 10.1109/TAC.9 URL |
| [10] |
doi: 10.1177/01423312221138887 URL |
| [11] |
doi: 10.1016/j.patrec.2023.08.015 URL |
| [12] |
doi: 10.1016/j.automatica.2012.11.010 URL |
| [13] |
doi: 10.1109/TAC.2017.2693824 URL |
| [14] |
doi: 10.1016/j.automatica.2023.111248 URL |
| [15] |
doi: 10.1016/j.ins.2023.119629 URL |
| [16] |
doi: 10.1016/j.automatica.2013.01.029 URL |
| [17] |
doi: 10.1016/j.automatica.2016.03.003 URL |
| [18] |
doi: 10.1109/TAC.9 URL |
| [19] |
doi: 10.1016/j.automatica.2022.110188 URL |
| [20] |
doi: 10.1177/01423312231156665 URL |
| [21] |
doi: 10.1109/TCYB.6221036 URL |
| [22] |
doi: 10.1002/asjc.v24.3 URL |
| [23] |
doi: 10.1109/TAC.2012.2220443 URL |
| [24] |
doi: 10.1016/j.jfranklin.2022.10.045 URL |
| [25] |
doi: 10.1177/01423312221147948 URL |
| [26] |
doi: 10.1109/LCSYS.2022.3172791 URL |
| [27] |
doi: 10.1016/j.oceaneng.2022.113422 URL |
| [28] |
doi: 10.1109/TAC.9 URL |
| [29] |
doi: 10.1016/j.jfranklin.2022.05.022 URL |
| [30] |
doi: 10.1016/j.automatica.2022.110188 URL |
| [31] |
邓甲, 王付永, 刘忠信, 等. 动态事件触发机制下二阶多智能体系统完全分布式控制[J/OL]. 控制理论与应用, 2023(2023-10-17)[2023-11-26]. http://kns.cnki.net/kcms/detail/44.1240.TP.20230106.1723.01.html.
|
|
|
|
| [32] |
doi: 10.1109/TCYB.2020.2981210 URL |
| [1] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [2] | YU Di, WANG Yajie, ZHAO Bo, LIU Qiong. Fixed-Time Tracking Control of Multi-agent Systems under Dynamic Event-Triggering Mechanism [J]. Acta Armamentarii, 2023, 44(5): 1403-1413. |
| [3] | KONG Guojie, FENG Shi, YU Huilong, JU Zhiyang, GONG Jianwei. A Review on Cooperative Motion Planning of Unmanned Vehicles [J]. Acta Armamentarii, 2023, 44(1): 11-26. |
| [4] | CAO Hao-zhe, WU Yan-xuan, ZHOU Feng, WANG Zheng-jie. Research on Containment Control of Second-order Nonlinear Multi-agent with Collision Avoidance Mechanism [J]. Acta Armamentarii, 2016, 37(9): 1646-1654. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||