
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (12): 4191-4204.doi: 10.12382/bgxb.2024.0977
毛明, 陈轶杰*( )
)
收稿日期:2024-10-16
上线日期:2024-12-30
通讯作者:
基金资助:
MAO Ming, CHEN Yijie*()
Received:2024-10-16
Online:2024-12-30
摘要:
越野是人类生产、生活中一个十分常见的场景,开发安全、可靠、低功耗的高机动越野装备,以帮助人类到达自身不能到达的地方是人们的始终追求,特别是在军事与抢险救援等作业中。以创建一门技术科学学科为愿景,提出越野学的概念,阐释其内涵,系统地说明了越野学中表层土壤力学与附着力生成、行驶(走)装置设计理论与方法、越野行驶动力学与控制、越野机器人学与仿生越野学4个方面的关键科学与技术问题和当前的研究进展,并提出未来需要重点攻克的关键技术和越野装备研发建议。
中图分类号:
毛明, 陈轶杰. 越野过程与行驶装置设计中的科学与技术问题[J]. 兵工学报, 2024, 45(12): 4191-4204.
MAO Ming, CHEN Yijie. Scientific and Technical Issues in Cross-terrain Process and Driving Device Design[J]. Acta Armamentarii, 2024, 45(12): 4191-4204.

图1 车辆-土壤交互作用模型[8]
Fig.1 Vehicle-soil interaction model[8]

图2 Ripsaw MS1无人车[24]
Fig.2 Ripsaw MS1 unmanned vehicle[24]

图3 Handle轮腿机器人[25]
Fig.3 Handle wheel-legged robot[25]
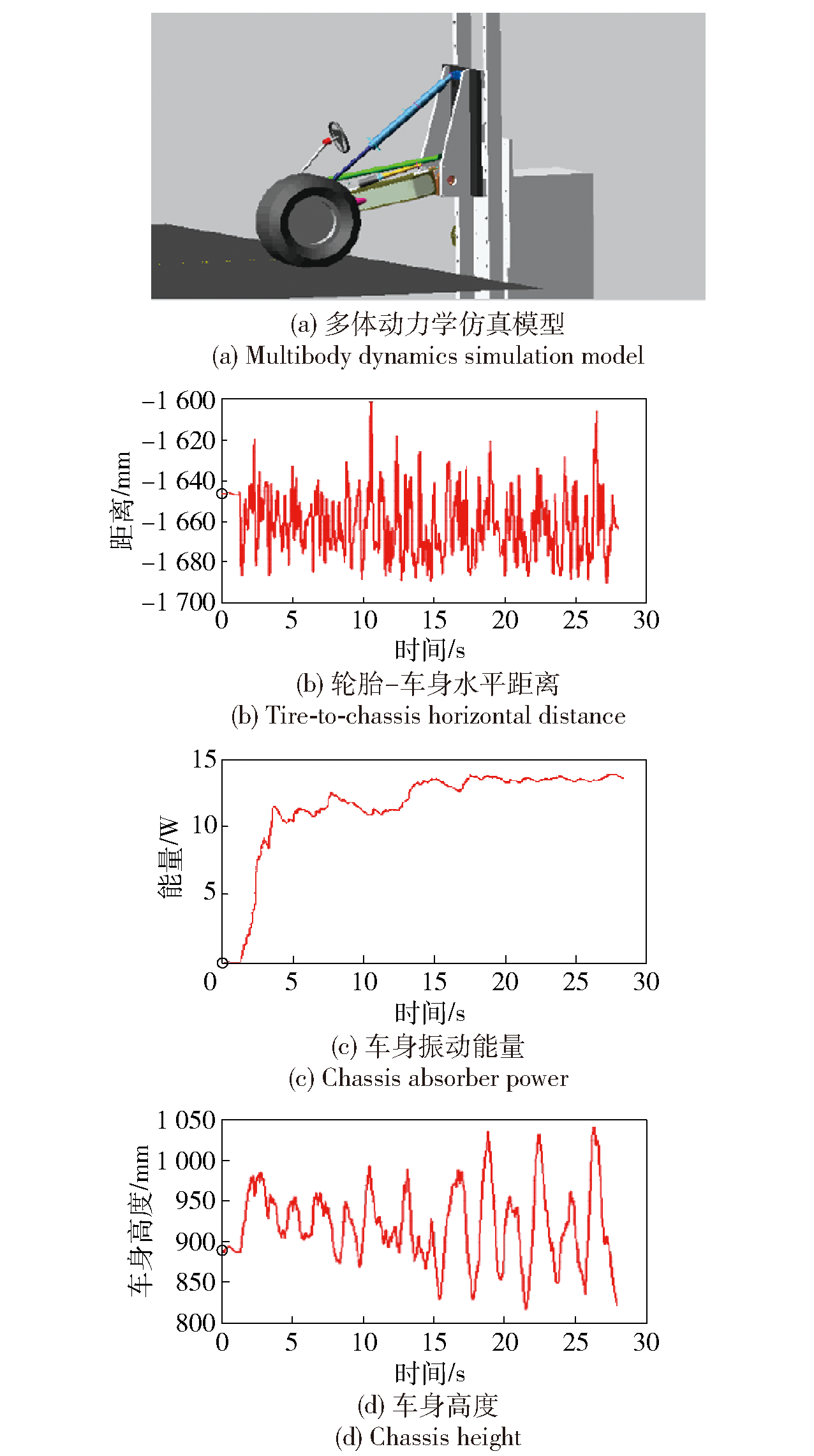
图4 多模式极限行程悬挂
Fig.4 Multi-mode extreme travel suspension

图5 Genshock馈能减振器[35]
Fig.5 Genshock energy feedback damper[35]

图6 可重构轮式履带[30]
Fig.6 Reconfigurable wheeled track[30]
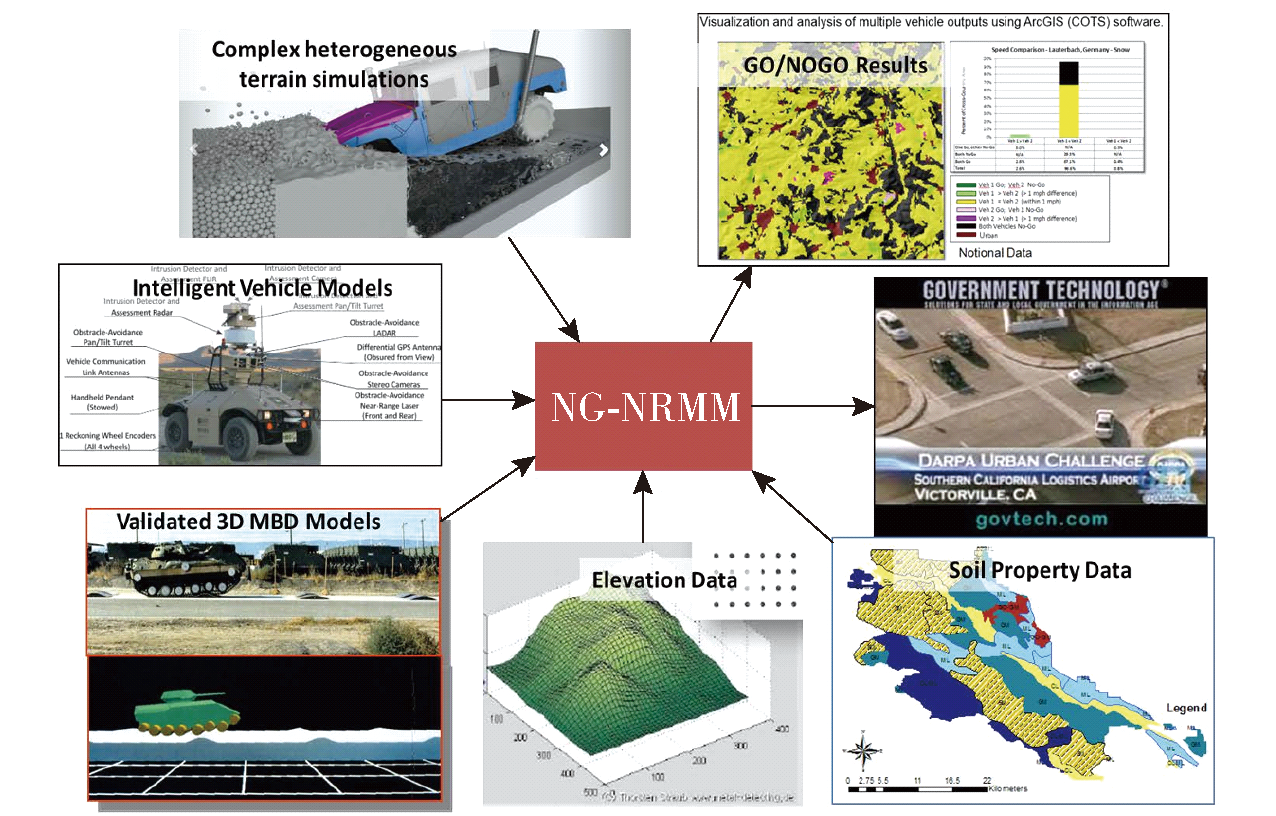
图7 北约NG-NRMM[44]
Fig.7 NATO NG-NRMM[44]

图8 祝融号火星车[73]
Fig.8 Zhu Rong Mars rover[73]
| [1] |
中华人民共和国国务院新闻办公室. 国防白皮书: 中国的军事战略[R/OL]. (2015-05-26). https://www.gov.cn/zhengce/2015-05/26/content_2868988.htm.
|
|
Information Office of the State Council of the People’s Republic of China. Whitepaper on national defense: China’s military strategy[R/OL]. (2015-05-26). https://www.gov.cn/zhengce/2015-05/26/content_2868988.htm. (in Chinese)
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
陈秉聪. 土壤-车辆系统力学[M]. 北京: 中国农业出版社, 1981.
|
|
|
|
| [12] |
培克 M G. 陆用车辆行驶原理[M]. 孙凯南, 译. 北京: 机械工业出版社, 1962.
|
|
|
|
| [13] |
李杰, 庄继德, 翟忠魁. 车辆行驶的表层沙土非线性弹性本构模型的试验研究[J]. 农业工程学报, 1996(2): 54-58.
|
|
|
|
| [14] |
杨聪彬, 董明明, 顾亮, 等. 考虑履刺形状的履带板土壤推力研究[J]. 北京理工大学学报, 2015, 35(11): 1118-1121.
|
|
|
|
| [15] |
刘聚德. 车辆沙地行驶理论[M]. 北京: 机械工业出版社, 1996.
|
|
|
|
| [16] |
张克健. 车辆地面力学[M]. 北京: 国防工业出版社, 2002.
|
|
|
|
| [17] |
王玉杰. 基于离散元法的车轮与松软地面相互作用分析[D]. 长春: 吉林大学, 2012.
|
|
|
|
| [18] |
杨涛. 基于离散元法的弹性车轮与松软地面相互作用分析[D]. 长春: 吉林大学, 2021.
|
|
|
|
| [19] |
肖万港, 周云波, 傅耀宇, 等. 土壤对军用越野车辆机动性能影响分析[J]. 兵工学报, 2024, 45(1): 288-298.
doi: 10.12382/bgxb.2022.0528 |
|
doi: 10.12382/bgxb.2022.0528 |
|
| [20] |
黄雪涛, 谢虎, 李加坤, 等. 履带式农业装备黏土壤土通过性研究[J]. 中国农机化学报, 2023, 44(6): 114-119.
|
|
doi: 10.13733/j.jcam.issn.20955553.2023.06.016 |
|
| [21] |
黄雪涛, 李玉琼, 董明明, 等. 履带装备超湿黏土壤土地面通过性研究[J]. 光学精密工程, 2023, 31(5): 719-728.
|
|
|
|
| [22] |
刘卫鹏. 高速履带车辆与软质地面动态耦合机理研究[D]. 北京: 北京理工大学, 2024.
|
|
|
|
| [23] |
孔涵. 考虑轮壤耦合作用的三轴分布式驱动车辆转矩分配[D]. 北京: 北京理工大学, 2024.
|
|
|
|
| [24] |
李晓东. 世界上最快的无人战车——美国“粗齿锯”高速履带车[J]. 轻兵器, 2010(4): 20-23.
|
|
|
|
| [25] |
Stuffi. Le nouveau robot de Boston Dynamics estterrifi-ant[EB/OL]. (2017-02-28). in French)
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
杜甫, 毛明, 陈轶杰, 等. 基于动力学模型与参数优化的ISD悬挂结构设计及性能分析[J]. 振动与冲击, 2014, 33(6): 59-65.
|
|
|
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| [34] |
|
| [35] |
|
| [36] |
祝恒佳, 田思远, 李双宝, 等. 车辆电磁馈能式动力吸振器设计[J]. 浙江大学学报(工学版), 2023, 57(8): 1644-1654.
|
|
|
|
| [37] |
朱惠莲. 松软地面行走机构的研究现状和展望[J]. 科技信息, 2006(8): 138-139.
|
|
|
|
| [38] |
司跃元, 赵新华, 侍才洪, 等. 轮履复合机器人行走机构的设计及运动学分析[J]. 机械设计与制造, 2013(7): 191-193.
|
|
|
|
| [39] |
|
| [40] |
|
| [41] |
|
| [42] |
|
| [43] |
周忠胜. 车辆装备“越野平均速度”类指标研究综述[J]. 汽车科技, 2024(3): 15-24, 30.
|
|
|
|
| [44] |
|
| [45] |
|
| [46] |
|
| [47] |
曲梦可, 王洪波, 荣誉. 轮腿混合机器人机械腿动力学建模与驱动预估[J]. 兵工学报, 2017, 38(8): 1619-1629.
doi: 10.3969/j.issn.1000-1093.2017.08.021 |
|
|
|
| [48] |
|
| [49] |
陈渐伟, 于传强, 刘志浩, 等. 多轴特种车辆的数据建模方法及横向动力学应用[J]. 兵工学报, 2023, 44(1): 165-175.
doi: 10.12382/bgxb.2022.0811 |
|
doi: 10.12382/bgxb.2022.0811 |
|
| [50] |
|
| [51] |
|
| [52] |
张昊, 魏超, 胡纪滨, 等. 基于转向模式切换的三轴独立转向车辆路径跟踪控制研究[J]. 机械工程学报, 2024, 60(2): 243-251.
|
|
|
|
| [53] |
|
| [54] |
|
| [55] |
|
| [56] |
赵轩, 王姝, 马建, 等. 分布式驱动电动汽车底盘集成控制技术综述[J]. 中国公路学报, 2023, 36(4): 221-248.
doi: 10.19721/j.cnki.1001-7372.2023.04.018 |
|
doi: 10.19721/j.cnki.1001-7372.2023.04.018 |
|
| [57] |
张雷, 徐同良, 李嗣阳, 等. 全线控分布式驱动电动汽车底盘协同控制研究综述[J]. 机械工程学报, 2023, 59(20): 261-280.
doi: 10.3901/JME.2023.20.261 |
|
doi: 10.3901/JME.2023.20.261 |
|
| [58] |
|
| [59] |
|
| [60] |
|
| [61] |
|
| [62] |
|
| [63] |
|
| [64] |
|
| [65] |
doi: 10.1109/LRA.2019.2926677 |
| [66] |
|
| [67] |
|
| [68] |
|
| [69] |
机器人分类:GB/T 39405—2020[S]. 北京: 中国标准出版社, 2020.
|
|
Classification of robot: GB/T 39405—2020[S]. Beijing: Standards Press of China, 2020. (in Chinese)
|
|
| [70] |
邓宗全, 范雪兵, 高海波, 等. 载人月球车移动系统综述及关键技术分析[J]. 宇航学报, 2012, 33(6): 675-689.
|
|
|
|
| [71] |
宁波. “玉兔号”是怎样被设计出来——我国首个月球车诞生记[EB/OL]. (2013-12-16). https://www.chinadaily.com.cn/tech/2013-12/16/content_17176424.htm.
|
|
|
|
| [72] |
潘冬, 贾阳, 袁宝峰, 等. 祝融号火星车主动悬架式移动系统设计与验证[J]. 中国科学: 技术科学, 2022, 52(2): 278-291.
|
|
|
|
| [73] |
新浪网. 倒计时!祝融号将以每秒4.9公里俯冲火星,中国即将获得登火第二[EB/OL]. (2021-05-13). https://k.sina.com.cn/article_2665232937_9edc3a29019012vio.html.
|
|
Sina. Countdown! The Zhu Rong rover will be plunging into Mars at a speed of 4.9 kilometers per second, and China is about to achieve its second landing on Mars[EB/OL]. (2021-05-13). https://k.sina.com.cn/article_2665232937_9edc3a29019012vio.html. (in Chinese)
|
|
| [74] |
|
| [75] |
张鑫. 基于单环运动链移动机构的跳跃步态规划与分析[D]. 北京: 北京交通大学, 2023.
|
|
|
|
| [76] |
苏波, 闫曈, 许威, 等. 四足机器人高机动越野技术研究[J]. 中国科学: 技术科学, 2023, 53(9): 1574-1588.
|
|
|
|
| [77] |
|
| [78] |
|
| [79] |
|
| [80] |
|
| [81] |
|
| [82] |
|
| [83] |
|
| [84] |
|
| [85] |
|
| [86] |
|
| [87] |
|
| [88] |
|
| [89] |
|
| [90] |
|
| [91] |
|
| [92] |
|
| [93] |
|
| [94] |
|
| [95] |
|
| [96] |
|
| [97] |
|
| [98] |
|
| [1] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [2] | 刘亚丽, 鲁妍池, 徐小龙, 宋遒志. 外骨骼机器人助力效能测试方法及应用综述[J]. 兵工学报, 2024, 45(8): 2497-2519. |
| [3] | 刘亚丽, 鲁妍池, 马勋举, 宋遒志. 基于卷积神经网络的肌电信号人体运动模式识别技术[J]. 兵工学报, 2024, 45(7): 2144-2158. |
| [4] | 王霄龙, 陈洋, 胡棉, 李旭东. 基于改进深度Q网络的机器人持续监测路径规划[J]. 兵工学报, 2024, 45(6): 1813-1823. |
| [5] | 董明泽, 温庄磊, 陈锡爱, 杨炅坤, 曾涛. 安全凸空间与深度强化学习结合的机器人导航方法[J]. 兵工学报, 2024, 45(12): 4372-4382. |
| [6] | 邢伯阳, 许威, 李宇峰, 赵浩宇, 王康, 闫曈. 基于分层解耦的四轮足机器人模型预测控制[J]. 兵工学报, 2024, 45(12): 4272-4282. |
| [7] | 陈轶杰, 张亚峰, 郑凤杰, 徐龙, 郑冠慧. 高机动越野平台非线性悬挂特性控制方法[J]. 兵工学报, 2024, 45(11): 3806-3819. |
| [8] | 党婉莹, 周乐来, 李贻斌, 张辰. 模块化机器人最优越野构型神经网络规划方法[J]. 兵工学报, 2024, 45(10): 3674-3685. |
| [9] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [10] | 许鹏, 邢伯阳, 刘宇飞, 李泳耀, 曾怡, 郑冬冬. 基于扩张状态观测器和模型预测方法的四足机器人抗干扰复合控制[J]. 兵工学报, 2023, 44(S2): 12-21. |
| [11] | 刘思宇, 廖峻北, 雷飞, 王志瑞, 闫曈, 党睿娜, 郭朝. 用于四足机器人的并联弹性腿足关节设计与优化[J]. 兵工学报, 2023, 44(S2): 71-83. |
| [12] | 降晨星, 姚其昌, 许鹏, 周雨婷, 闫曈. 新技术形势下四足、双足机器人技术的变革[J]. 兵工学报, 2023, 44(S2): 84-89. |
| [13] | 鞠爽, 王晶, 王灏, 周萌. 基于GWO-WOA的执行器严重故障多移动机器人编队重构控制[J]. 兵工学报, 2023, 44(S2): 114-125. |
| [14] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [15] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4