
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (11): 3806-3819.doi: 10.12382/bgxb.2024.0767
陈轶杰1,2,3,*( ), 张亚峰1,4, 郑凤杰1,2, 徐龙1,2,3, 郑冠慧1
), 张亚峰1,4, 郑凤杰1,2, 徐龙1,2,3, 郑冠慧1
收稿日期:2024-09-02
上线日期:2024-11-26
通讯作者:
基金资助:
CHEN Yijie1,2,3,*(), ZHANG Yafeng1,4, ZHENG Fengjie1,2, XU Long1,2,3, ZHENG Guanhui1
Received:2024-09-02
Online:2024-11-26
摘要:
为了提升装备机动能力,基于摆动缸式油气悬挂装置,建立高压气动原理和背压可控的阻尼阀结构,实现刚度和阻尼特性的实时调节。基于单轮悬挂模型开展不同刚度控制方法的振动响应对比分析以及阻尼特性频域不动点推导,提出一种刚度有级调节控制策略和一种频域混合阻尼控制方法,通过单轮悬挂动力学模型验证所提控制方法的有效性,并构建高机动履带车辆动力学模型进行整车仿真分析。在康庄、羊八井、坨里实测路面环境下,采用刚度阻尼联合控制方法的悬挂装置相较于传统被动悬挂的越野速度提升了25%以上,验证了新提出特性控制方法对振动响应抑制的优越性,能够为悬挂装置实现弹性与阻尼双特性自适应调节提供支撑。
中图分类号:
陈轶杰, 张亚峰, 郑凤杰, 徐龙, 郑冠慧. 高机动越野平台非线性悬挂特性控制方法[J]. 兵工学报, 2024, 45(11): 3806-3819.
CHEN Yijie, ZHANG Yafeng, ZHENG Fengjie, XU Long, ZHENG Guanhui. Nonlinear Suspension Characteristic Control Methods for High-mobility Off-road Vehicles[J]. Acta Armamentarii, 2024, 45(11): 3806-3819.
图1 摆动缸式油气悬挂装置构型
Fig.1 Swing cylinder hydro-pneumatic suspension system configuration
图2 摆动缸式油气悬挂参数示意图
Fig.2 Schematic diagram of swing cylinder hydro-pneumatic suspension parameters
图3 摆动缸式悬挂不同参数对比分析
Fig.3 Comparative analysis of different parameters of swing cylinder suspension
图4 背压可调阻尼阀结构示意图
Fig.4 Schematic diagram of the structure of the back pressure adjustable damping valve
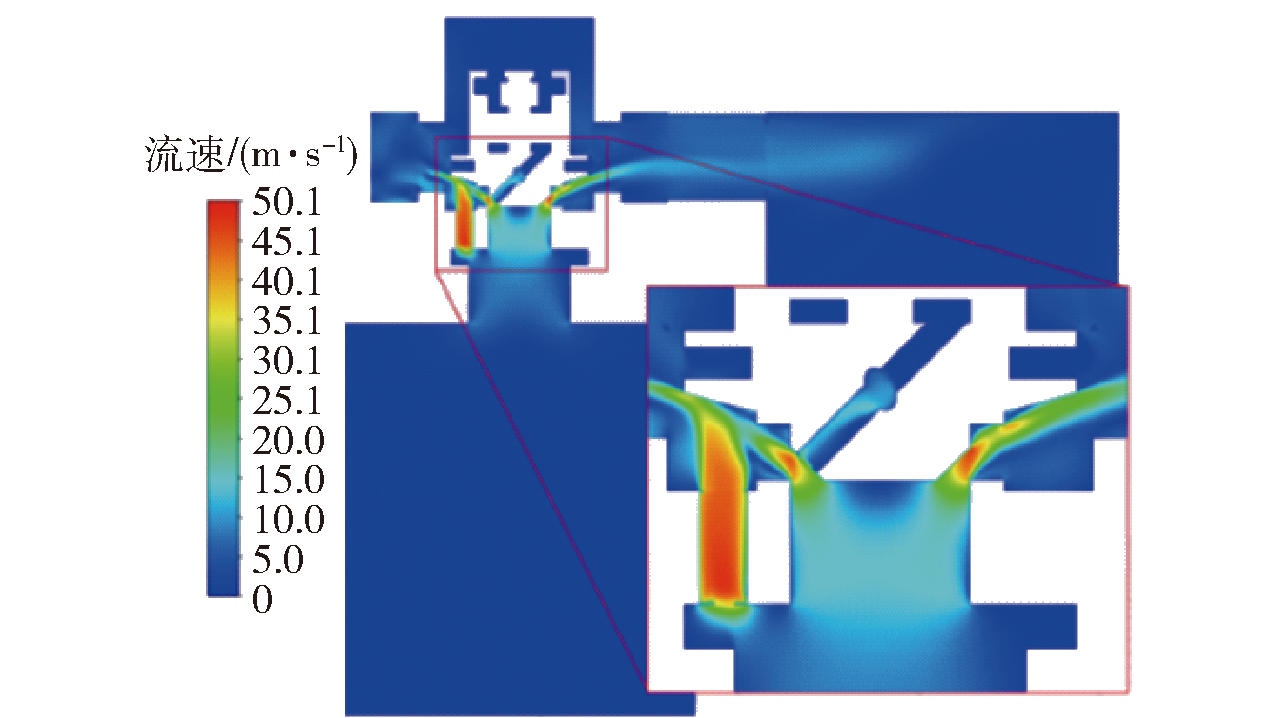
图5 未施加阻尼控制力速度云图
Fig.5 Velocity cloud diagram without damping control force
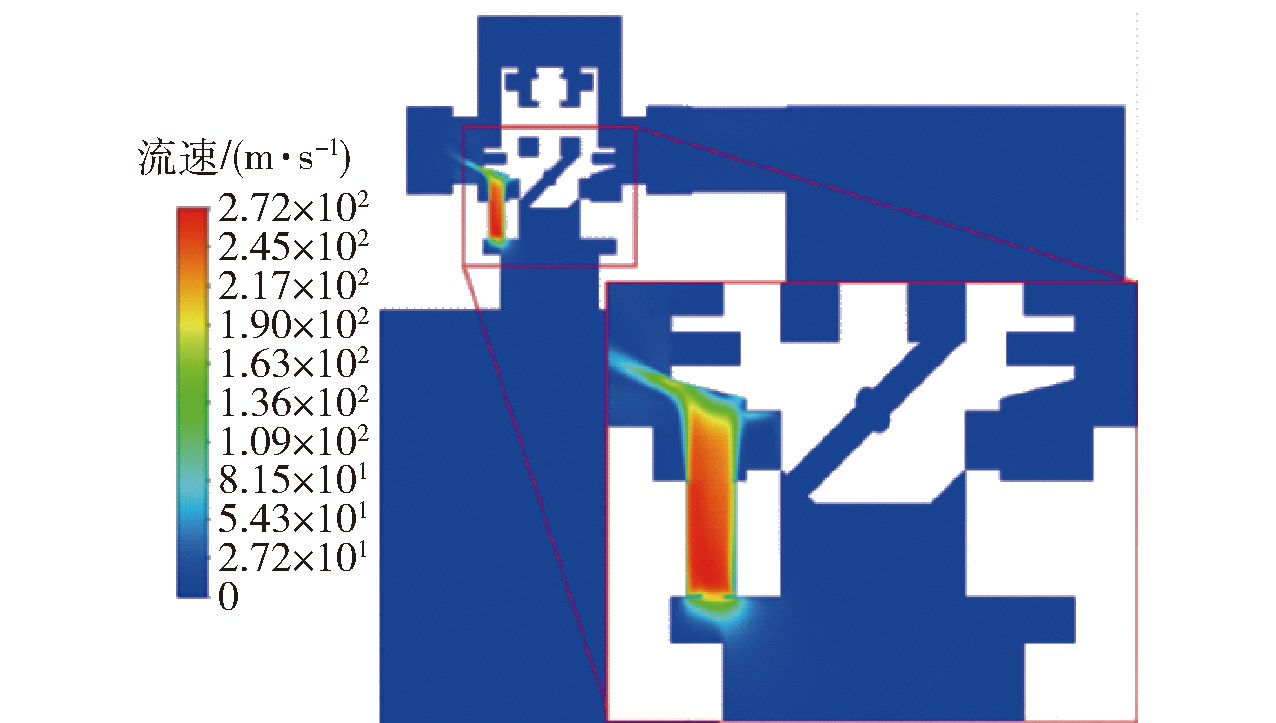
图6 施加最大阻尼控制力速度云图
Fig.6 Velocity cloud diagram when applying maximum damping control force
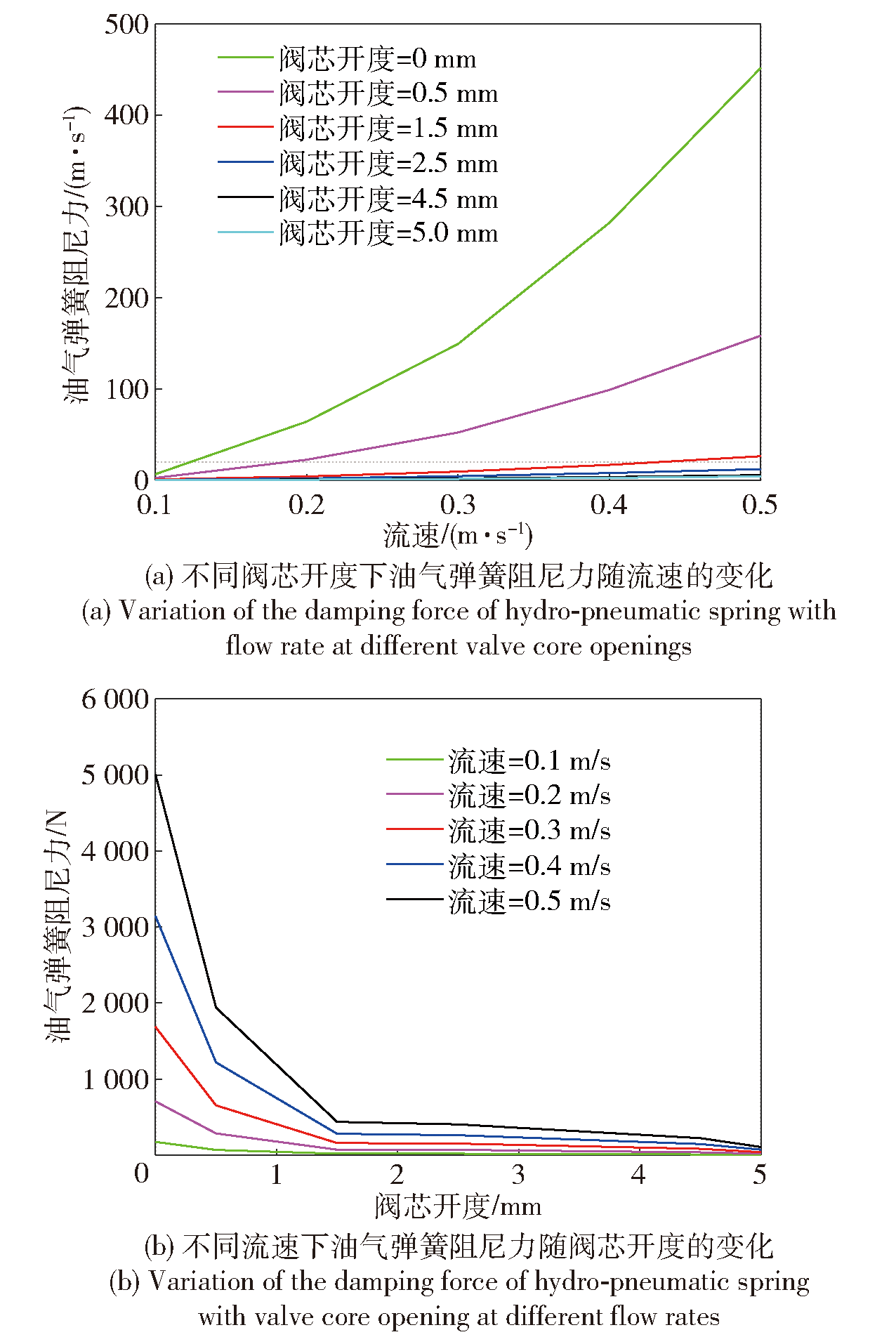
图7 不同工况下的阻尼阀力值变化曲线
Fig.7 Change curves of damping valve force under different working conditions

图8 摆动缸式悬挂台架试验
Fig.8 Swing cylinder suspension bench test
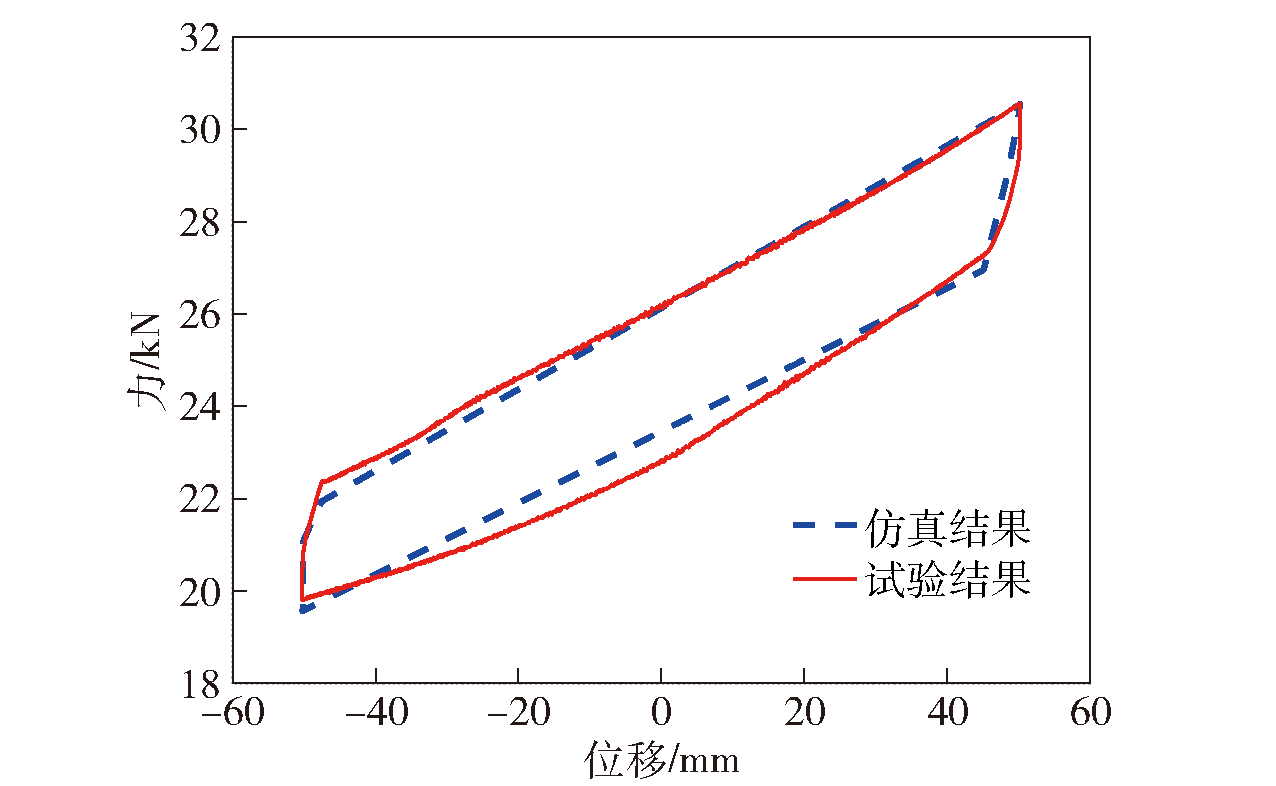
图9 未施加阻尼控制力示功特性图
Fig.9 Power characteristic chart without applying damping control force
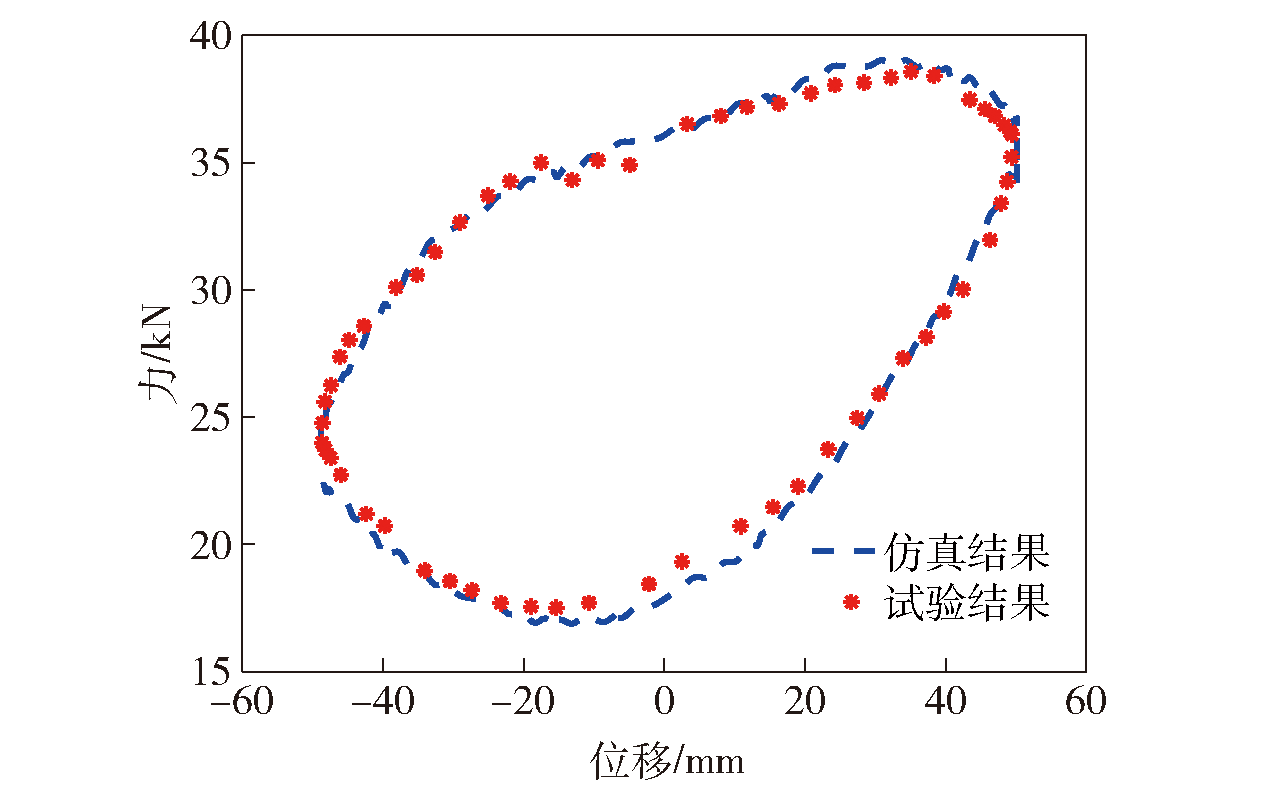
图10 施加最大阻尼控制力示功特性
Fig.10 Indicator characteristics when applying maximum damping control force
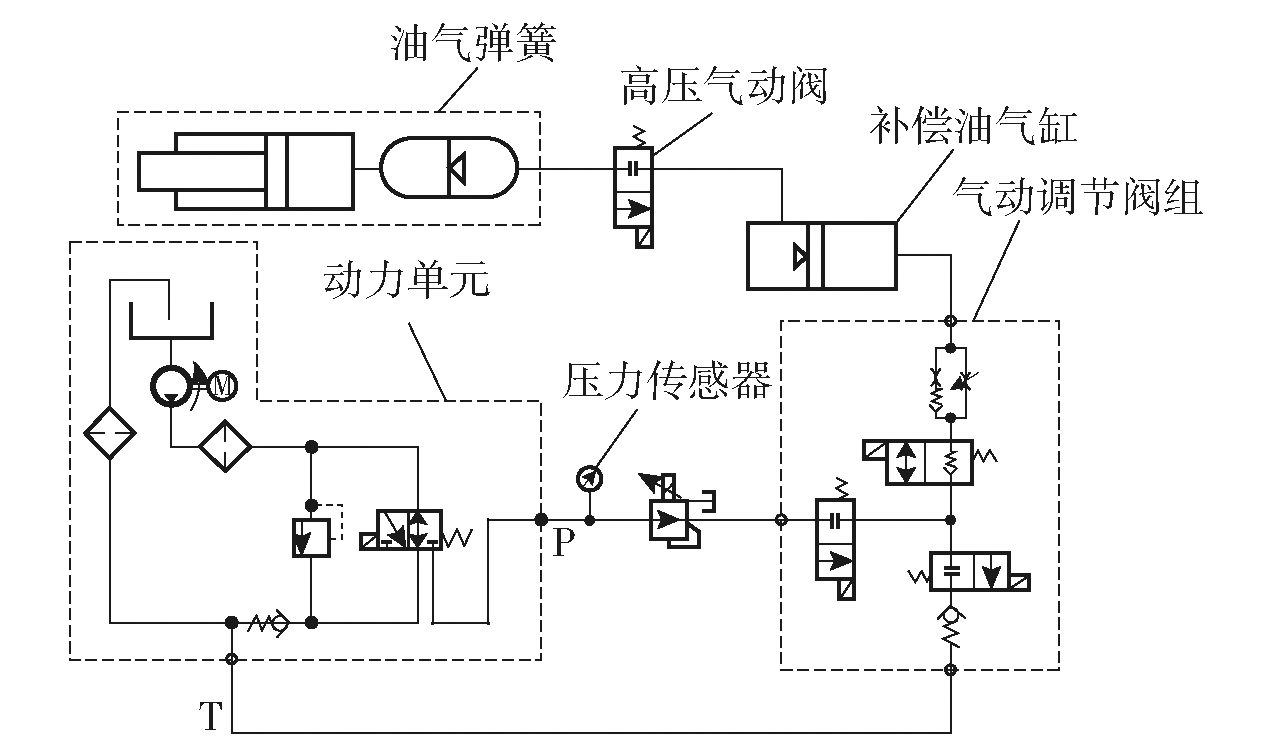
图11 高压气动调节原理
Fig.11 High-pressure pneumatic regulation principle
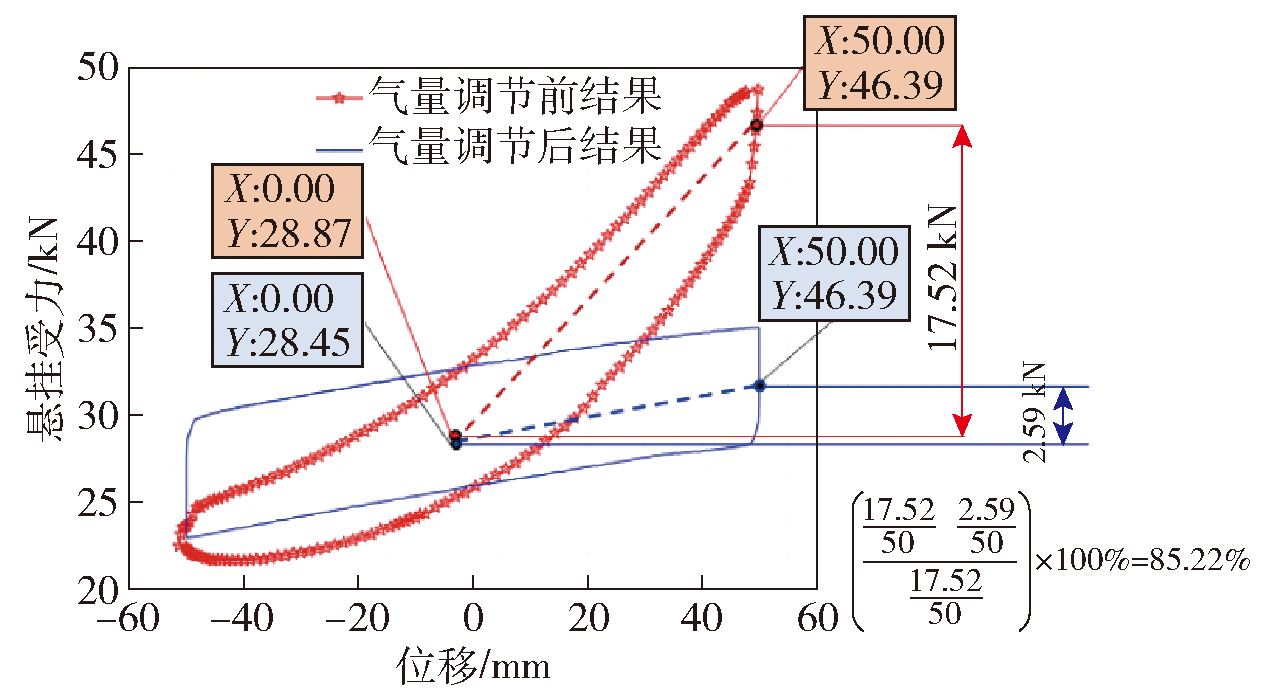
图12 高压气量刚度调节曲线
Fig.12 Stiffness adjustment curve of high-pressure gas volume
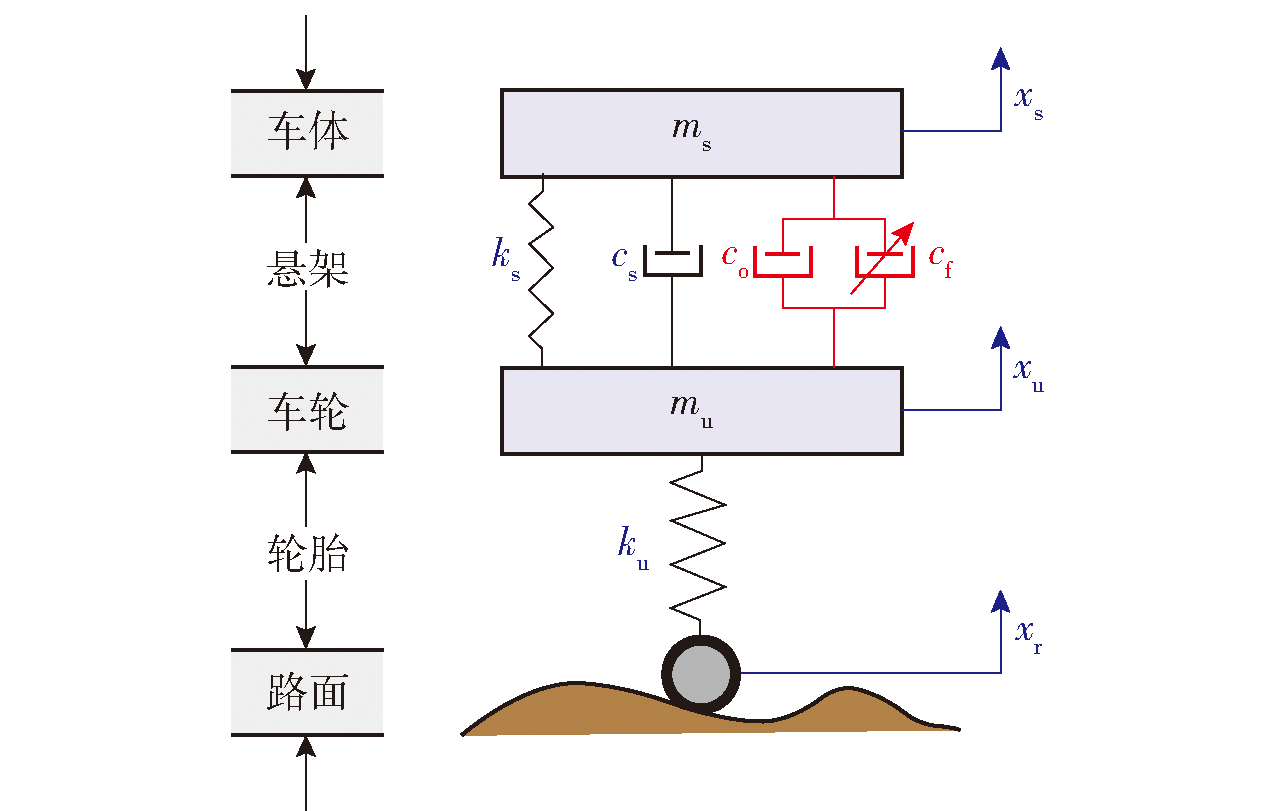
图13 单轮动力学模型
Fig.13 1/4 suspension dynamics model
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 簧上质量ms/kg | 3030 | 控制可调阻尼cf | 0~3cs |
| 簧下质量mu/kg | 500 | 悬挂刚度ks/(N·m-1) | 172250 |
| 悬挂阻尼cs/(N·s·m-1) | 4569 | 车轮刚度ku/(N·m-1) | 780000 |
| 控制基本阻尼c0 | cs/2 | — |
表1 1/4悬挂仿真参数
Table 1 1/4 Suspension simulation parameters
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 簧上质量ms/kg | 3030 | 控制可调阻尼cf | 0~3cs |
| 簧下质量mu/kg | 500 | 悬挂刚度ks/(N·m-1) | 172250 |
| 悬挂阻尼cs/(N·s·m-1) | 4569 | 车轮刚度ku/(N·m-1) | 780000 |
| 控制基本阻尼c0 | cs/2 | — |
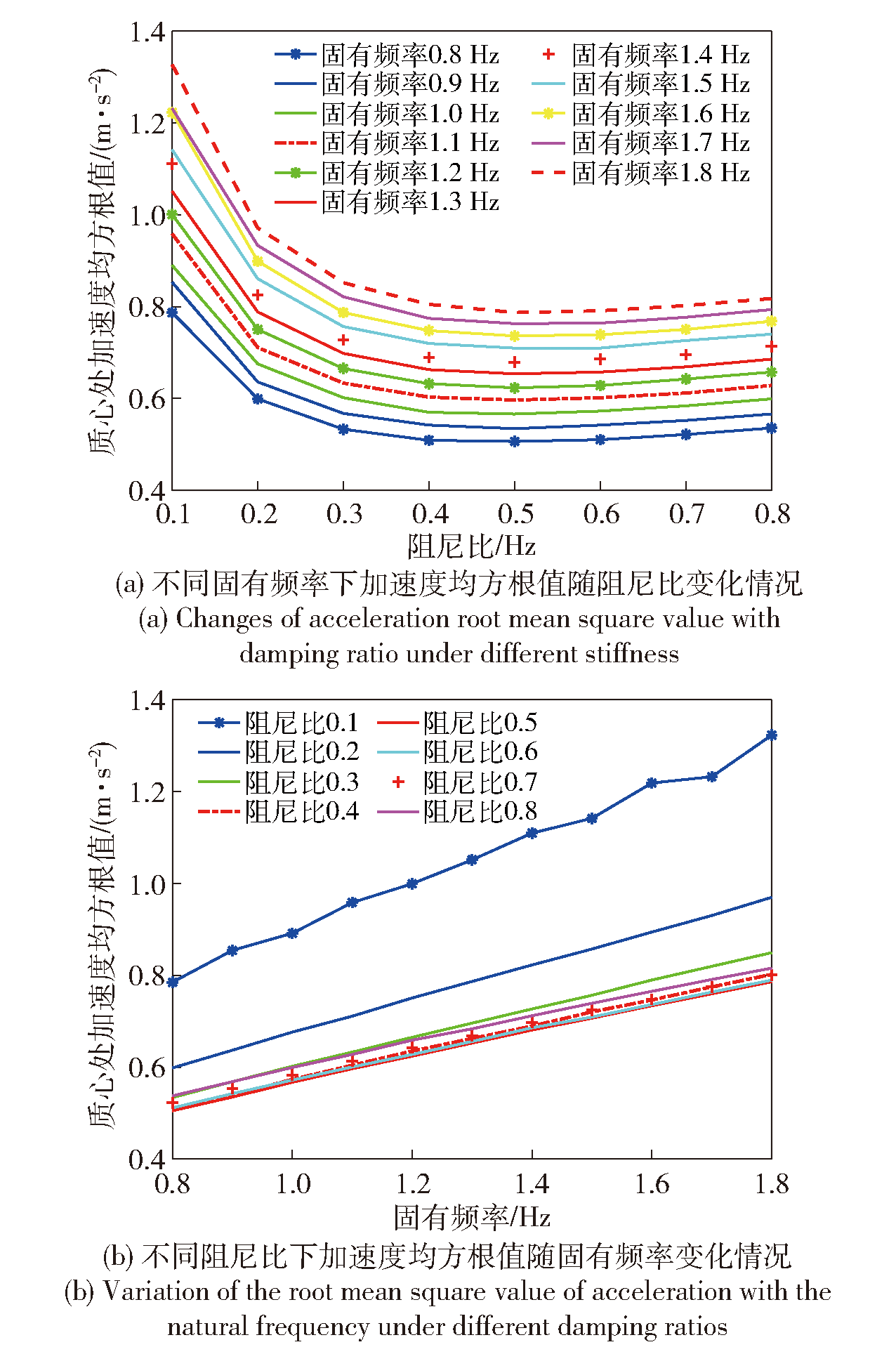
图14 悬挂刚度和阻尼特性匹配结果
Fig.14 Matching results of suspension stiffness and damping characteristics
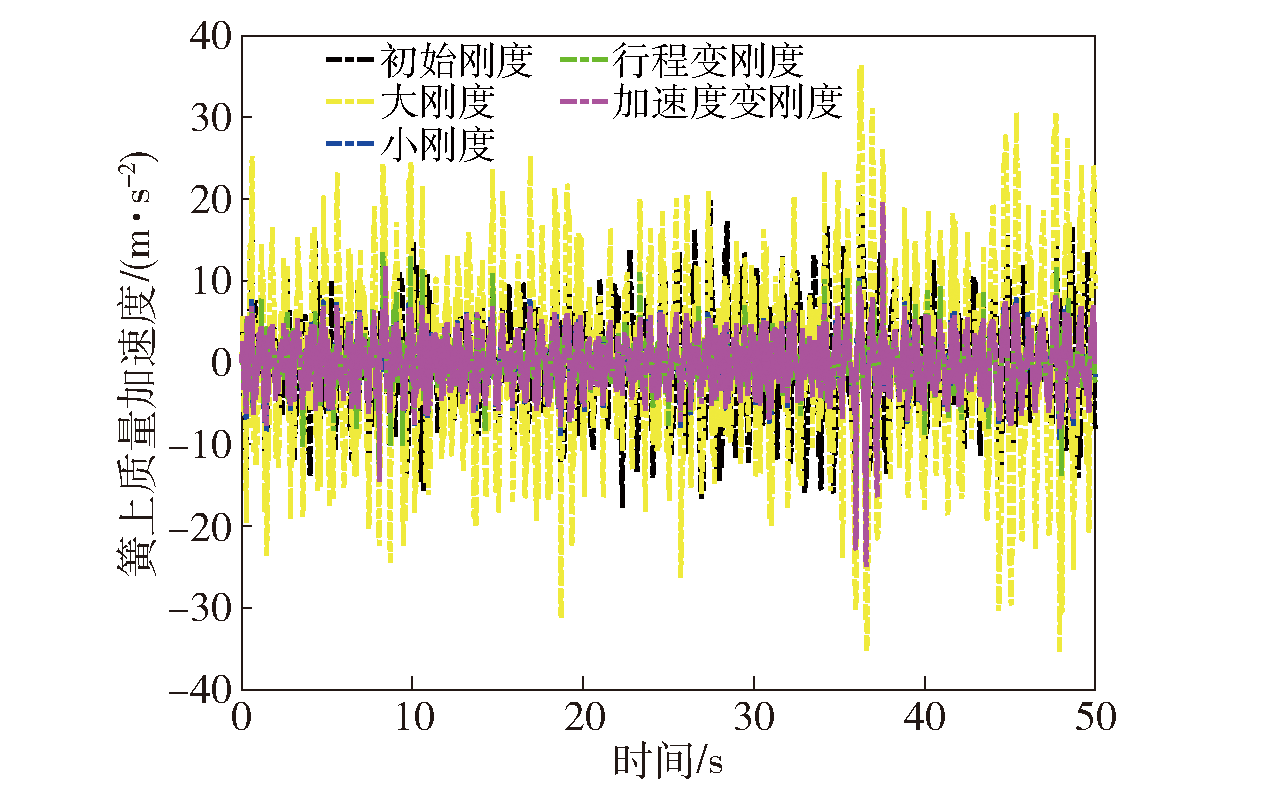
图15 不同悬挂刚度簧上质量加速度
Fig.15 Sprung mass acceleration with different suspension stiffnesses
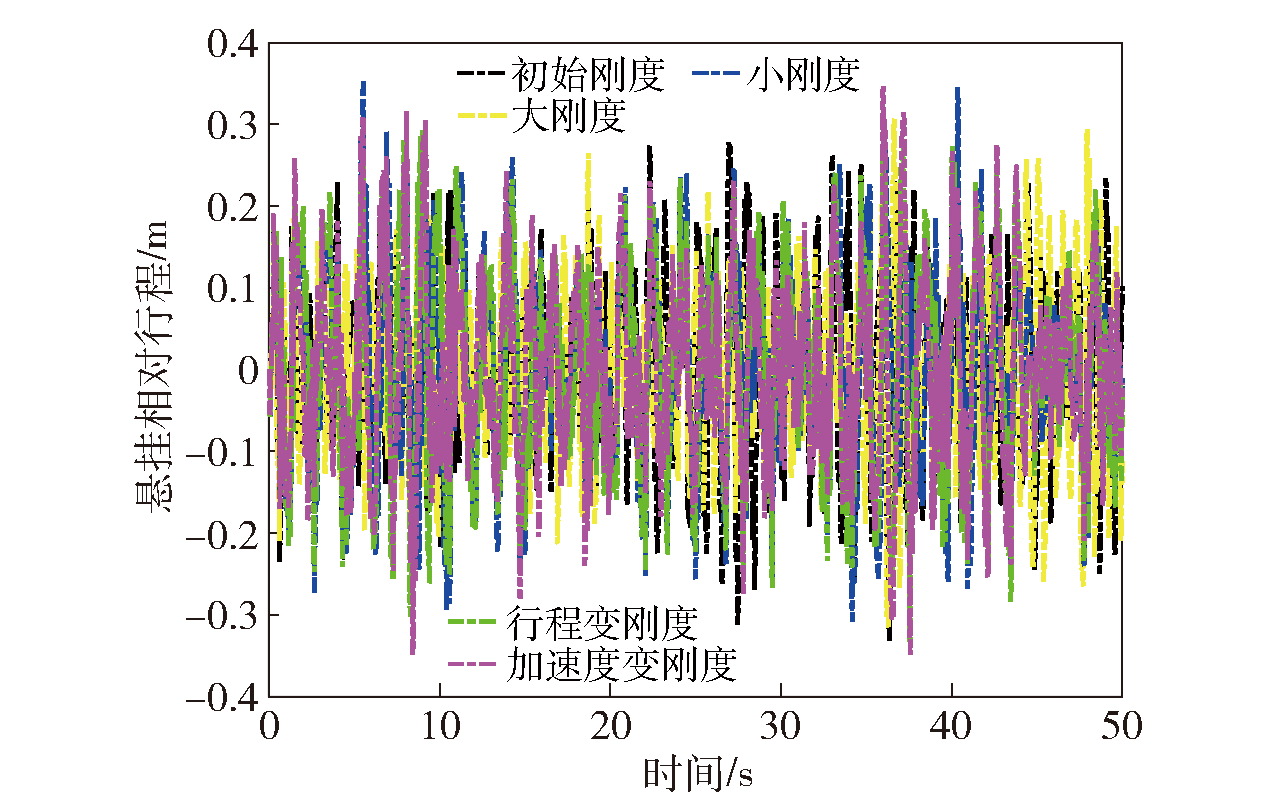
图16 不同悬挂刚度悬挂相对行程
Fig.16 Relative displacement of suspension with different stiffnesses
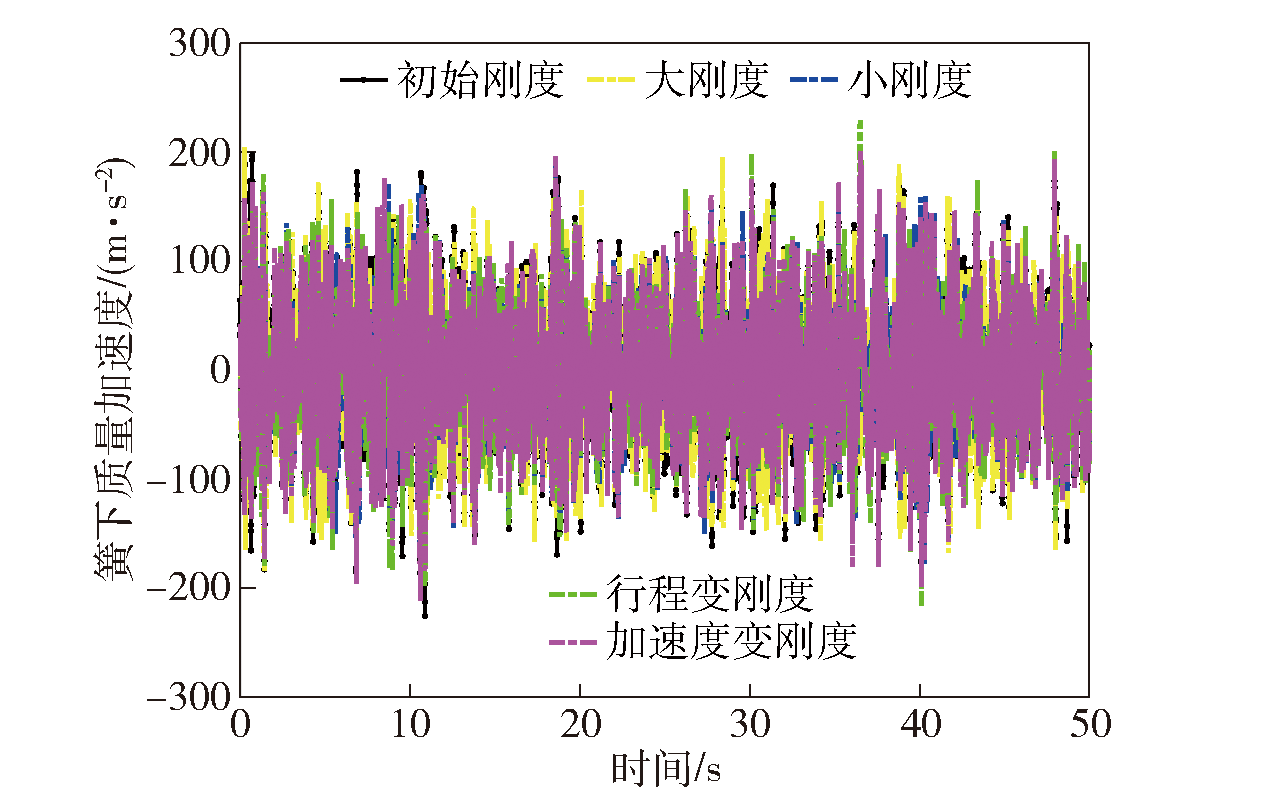
图17 不同悬挂刚度簧下质量加速度
Fig.17 Unsprung mass acceleration with different suspension stiffnesses
| 响应均方根值 | 被动 悬挂 | 2倍 大刚度 | 0.5倍 小刚度 | 行程 变刚度 | 加速度 变刚度 |
|---|---|---|---|---|---|
| 簧上质量加速度(m·s-2) | 6.35 | 12.85 | 2.64 | 3.47 | 2.85 |
| 悬挂相对行程/mm | 103 | 110 | 112 | 113 | 108 |
| 簧下质量加速度/(m·s-2) | 61.2 | 60.38 | 58.22 | 60.55 | 60.19 |
表2 不同悬挂刚度控制方法振动响应对比
Table 2 Comparison of vibration responses of different suspension stiffness control methods
| 响应均方根值 | 被动 悬挂 | 2倍 大刚度 | 0.5倍 小刚度 | 行程 变刚度 | 加速度 变刚度 |
|---|---|---|---|---|---|
| 簧上质量加速度(m·s-2) | 6.35 | 12.85 | 2.64 | 3.47 | 2.85 |
| 悬挂相对行程/mm | 103 | 110 | 112 | 113 | 108 |
| 簧下质量加速度/(m·s-2) | 61.2 | 60.38 | 58.22 | 60.55 | 60.19 |
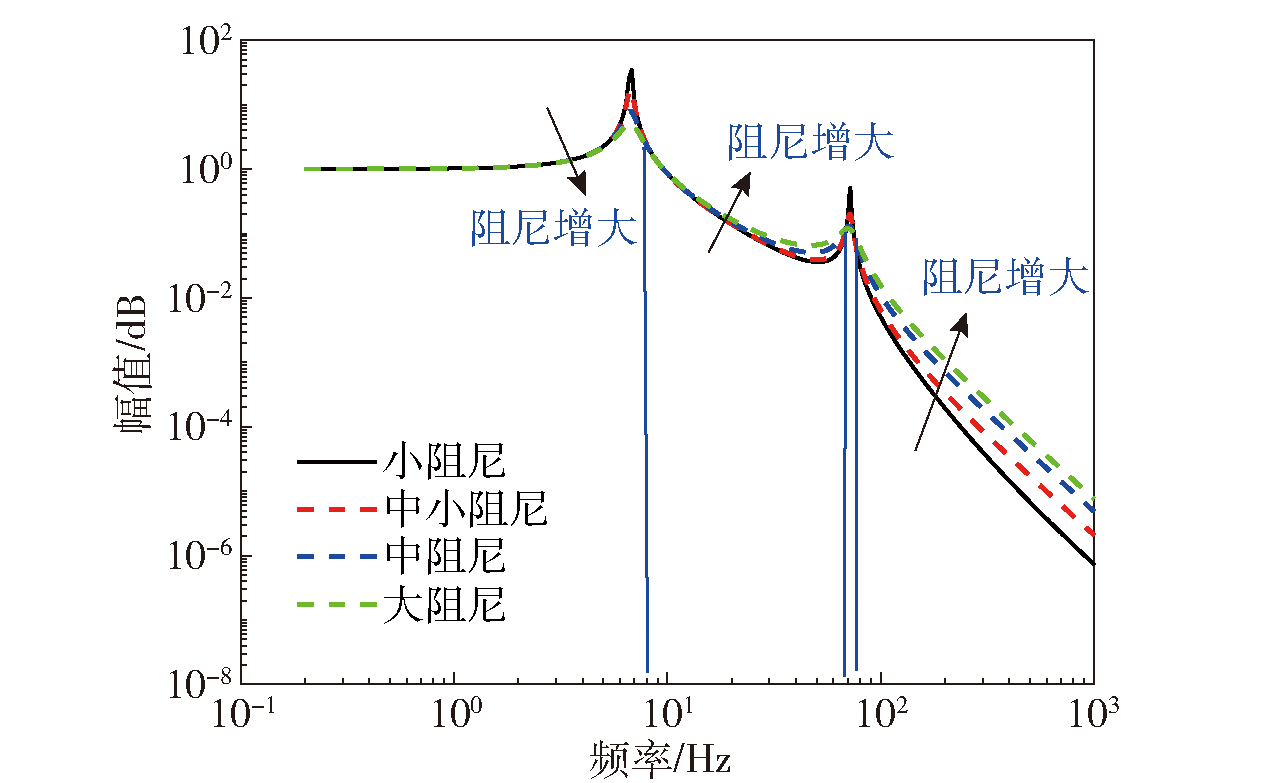
图18 簧上质量加速度对车轮位移的幅频特性
Fig.18 Amplitude-frequency characteristics of sprung mass displacement to road excitation
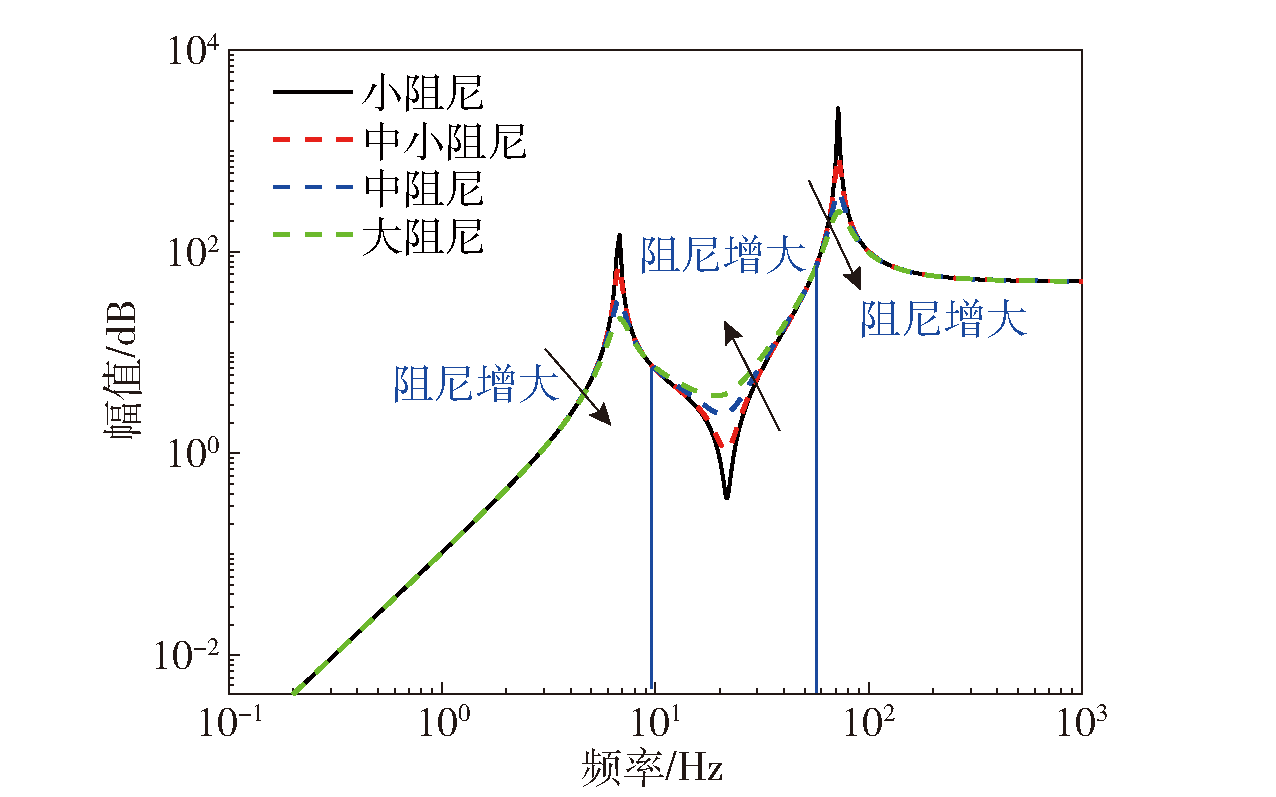
图19 簧下质量位移对车轮位移的幅频特性
Fig.19 Amplitude-frequency characteristics of unsprung mass displacement to road excitation
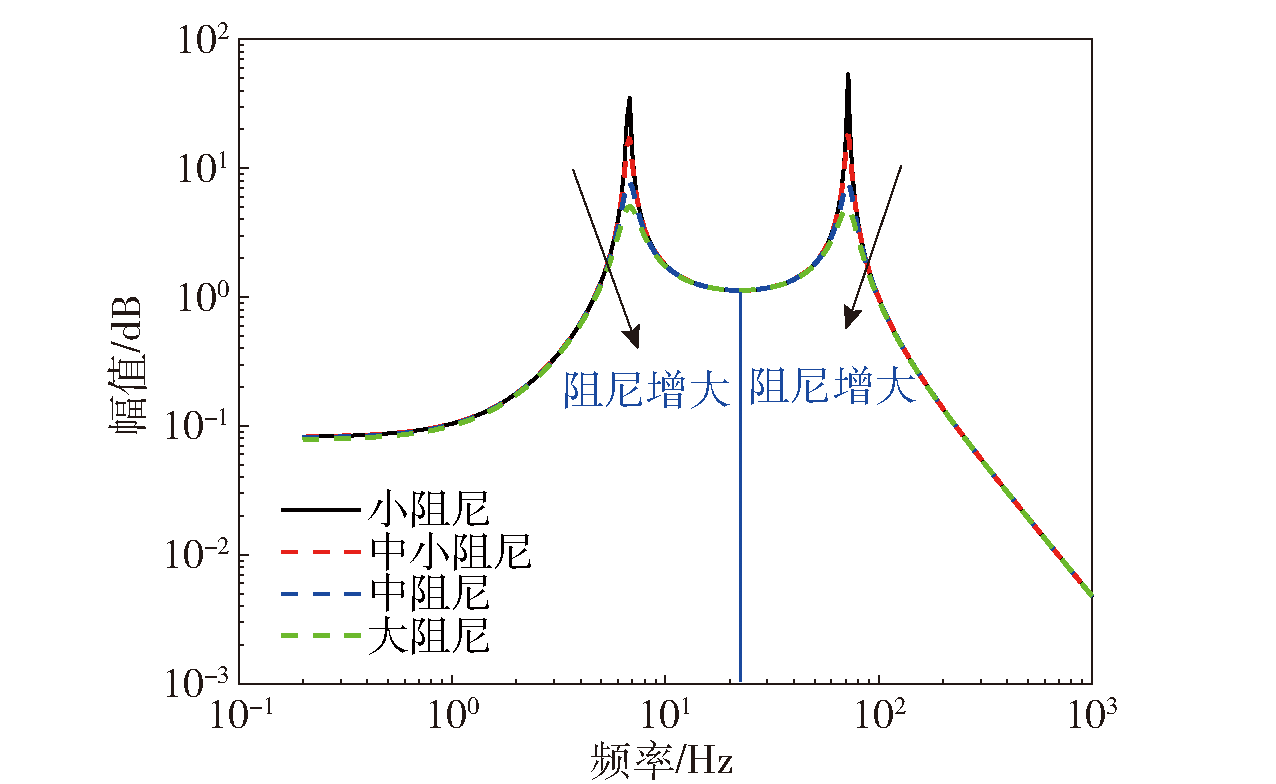
图20 悬挂相对行程对车轮位移的幅频特性
Fig.20 Amplitude-frequency characteristics of suspension relative travel to road excitation
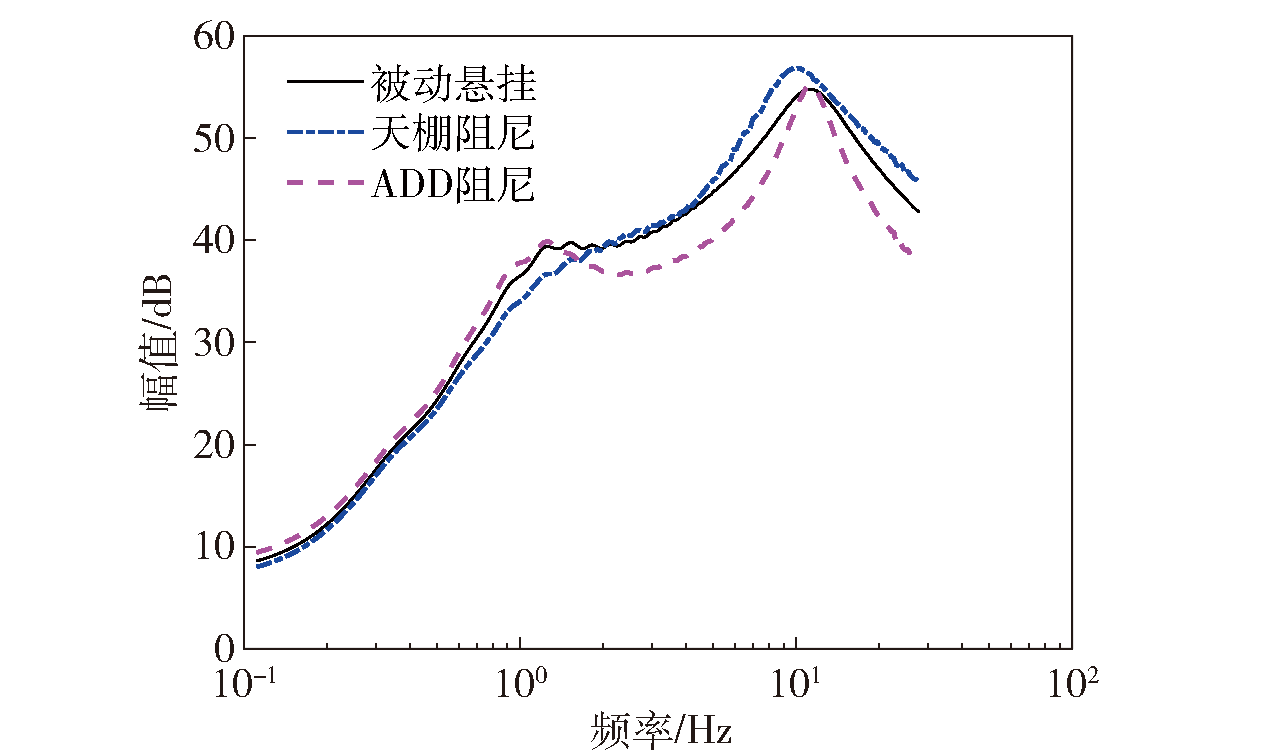
图21 簧上质量加速度幅频特性
Fig.21 Amplitude-frequency characteristics of sprung vibration acceleration
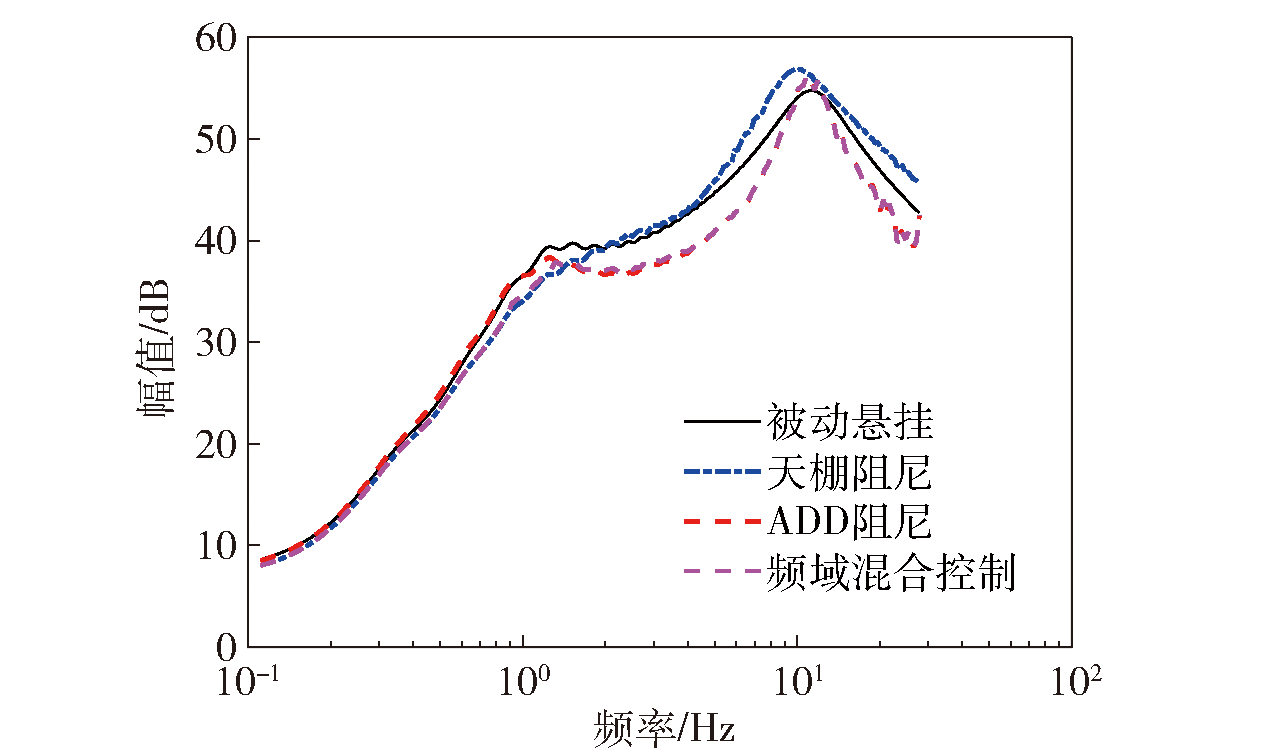
图22 簧上质量加速度幅频特性对比
Fig.22 Comparison of amplitude-frequency characteristics of sprung acceleration
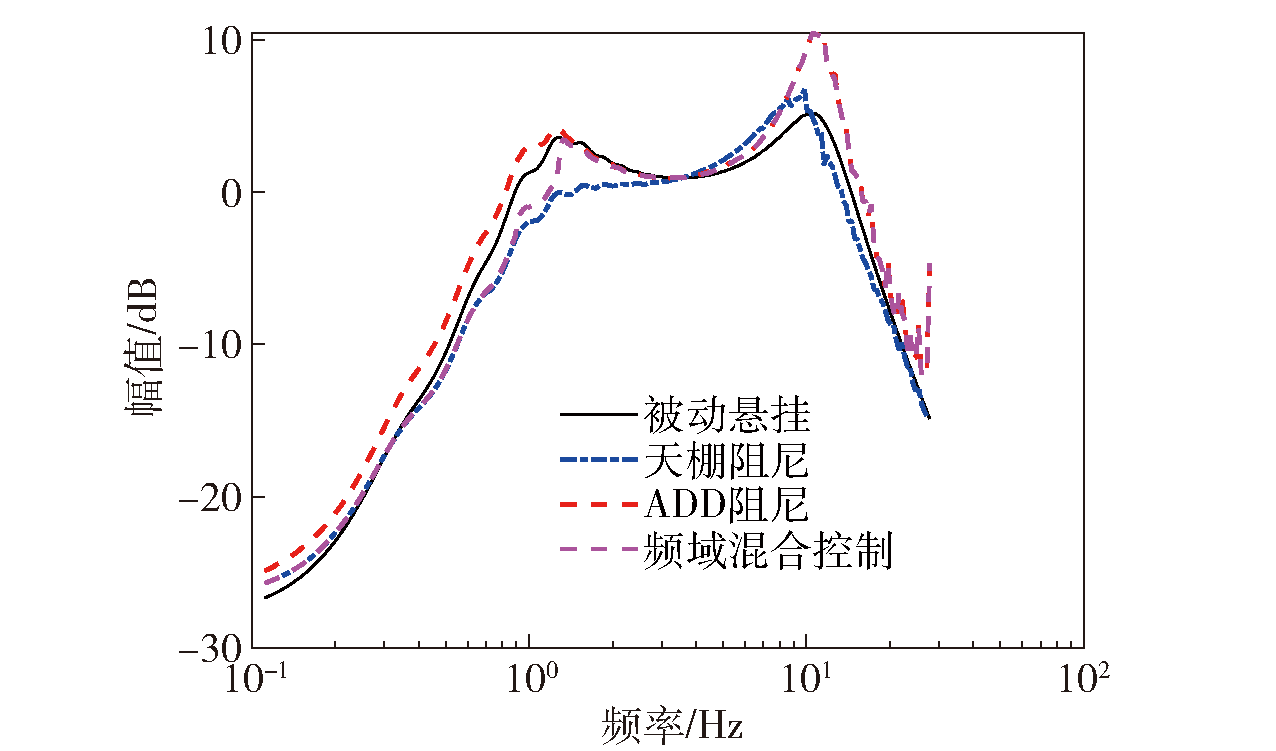
图23 悬挂相对行程幅频特性对比
Fig.23 Comparison of amplitude-frequency characteristics of suspension travel
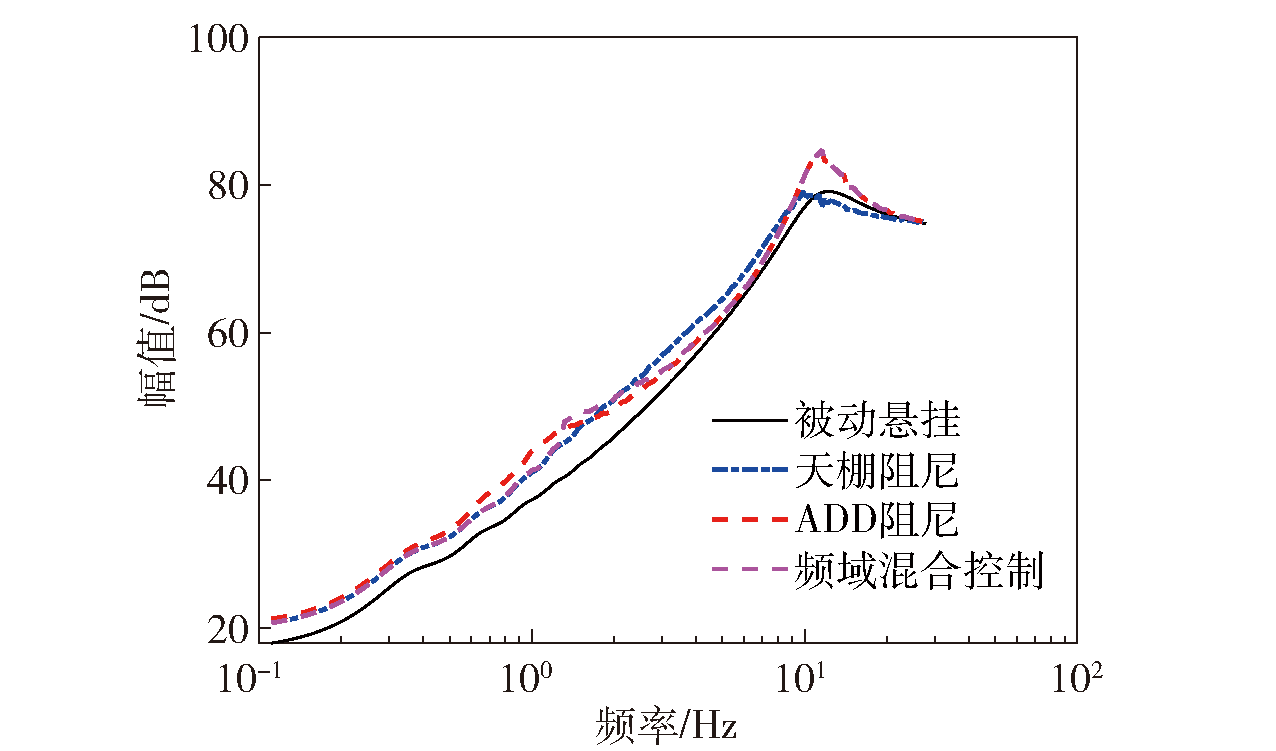
图24 簧下质量加速度幅频特性对比
Fig.24 Comparison of amplitude-frequency characteristics of wheel relative displacement
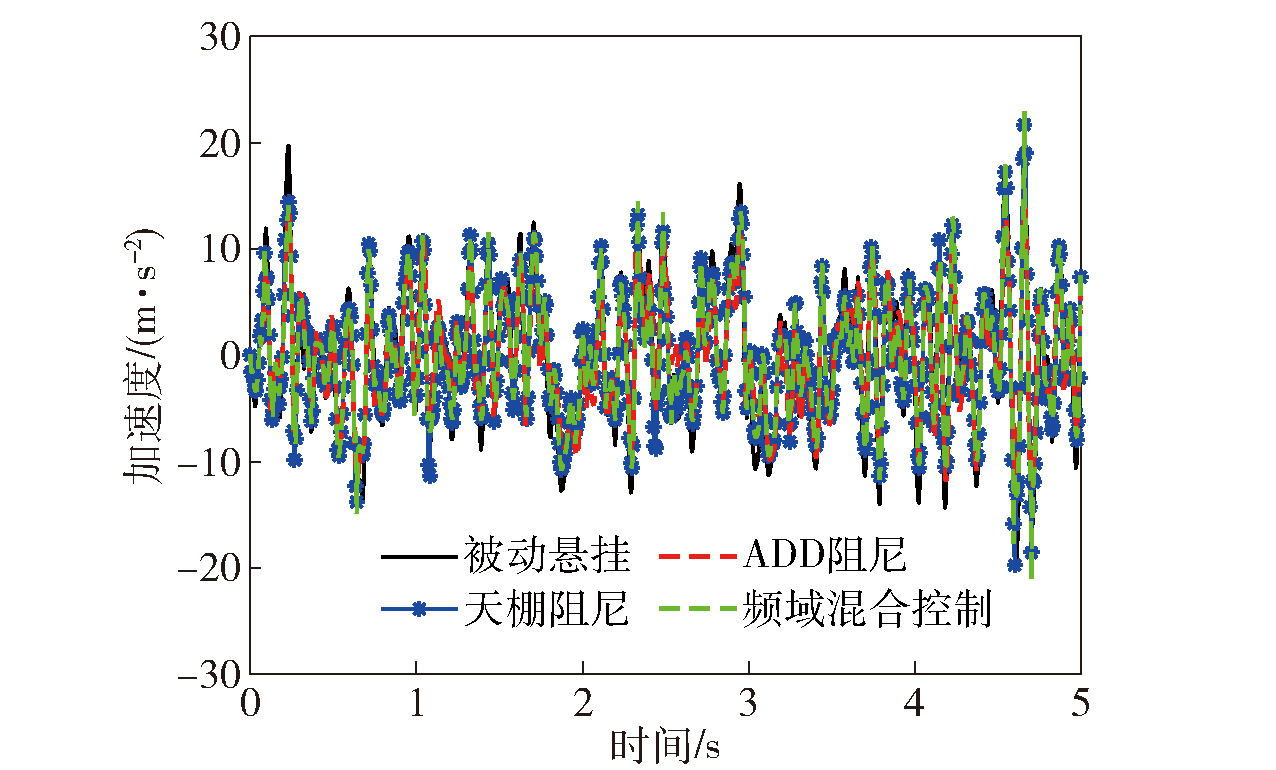
图25 簧上质量加速度时域特性对比
Fig.25 Comparison of time domain characteristics of sprung acceleration
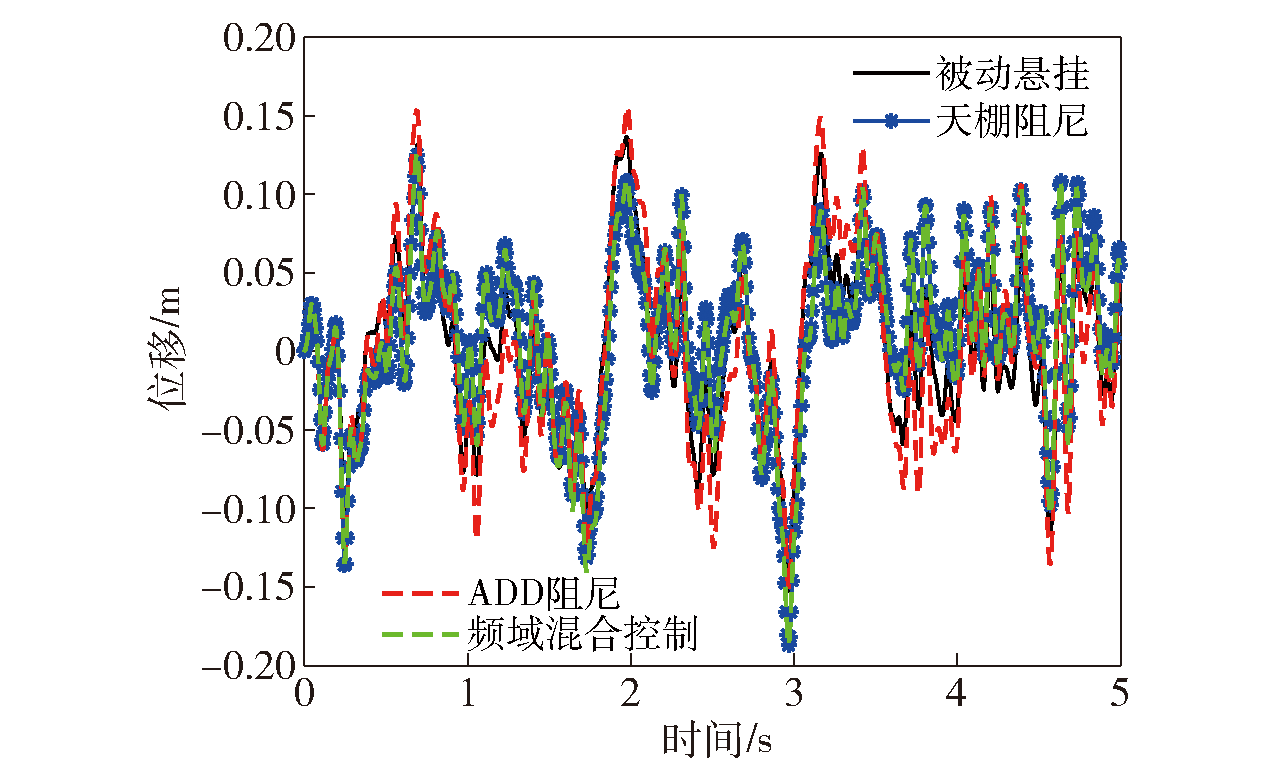
图26 悬挂相对行程时域特性对比
Fig.26 Comparison of time domain characteristics of suspension relative travel
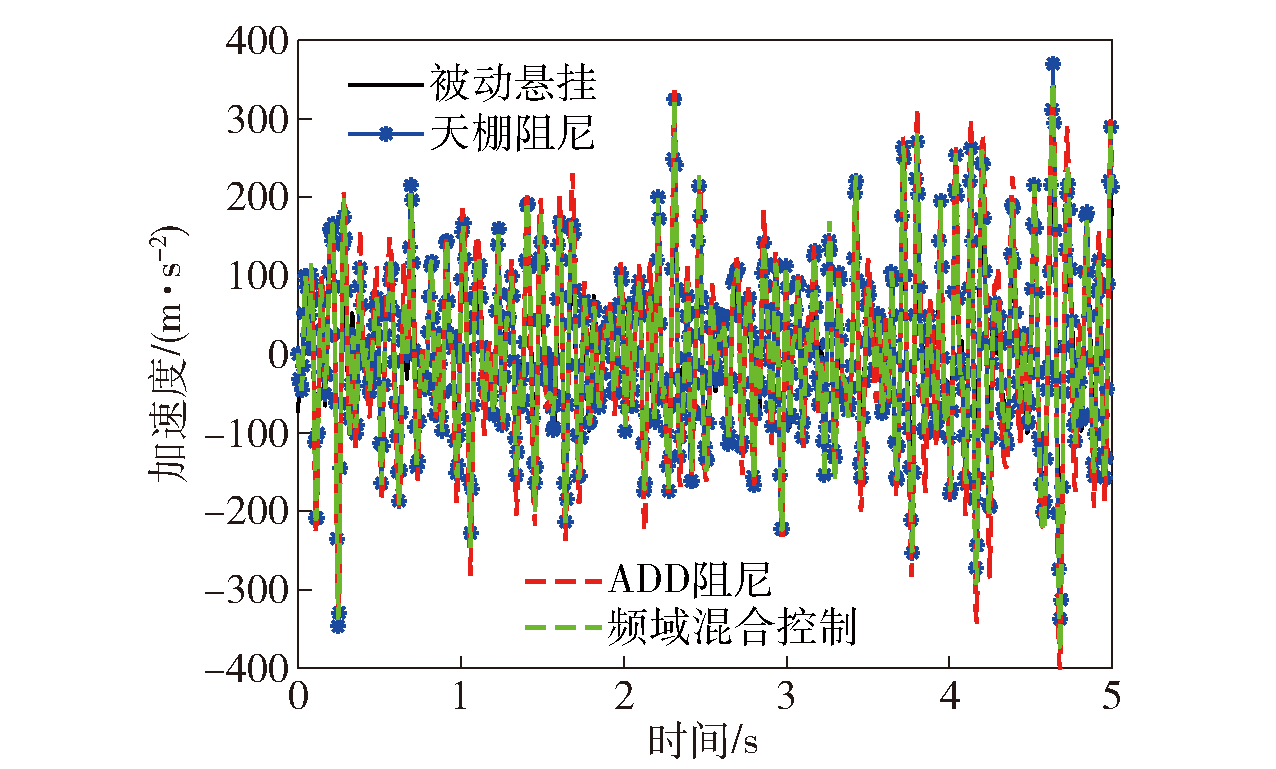
图27 簧下质量加速度时域特性对比
Fig.27 Comparison of time domain characteristics of unsprung acceleration
| 响应均方根 | 被动 悬挂 | 天棚阻 尼控制 | ADD阻 尼控制 | 频域混 合控制 |
|---|---|---|---|---|
| 簧上质量加速度/(m·s-2) | 6.37 | 7.06 | 5.46 | 5.34 |
| 悬挂相对行程/mm | 53 | 46.7 | 69.2 | 64.6 |
| 簧下质量加速度/(m·s-2) | 91.46 | 89.2 | 120.74 | 119.54 |
表3 不同控制策略振动响应对比
Table 3 Comparison of vibration responses of different control strategies
| 响应均方根 | 被动 悬挂 | 天棚阻 尼控制 | ADD阻 尼控制 | 频域混 合控制 |
|---|---|---|---|---|
| 簧上质量加速度/(m·s-2) | 6.37 | 7.06 | 5.46 | 5.34 |
| 悬挂相对行程/mm | 53 | 46.7 | 69.2 | 64.6 |
| 簧下质量加速度/(m·s-2) | 91.46 | 89.2 | 120.74 | 119.54 |
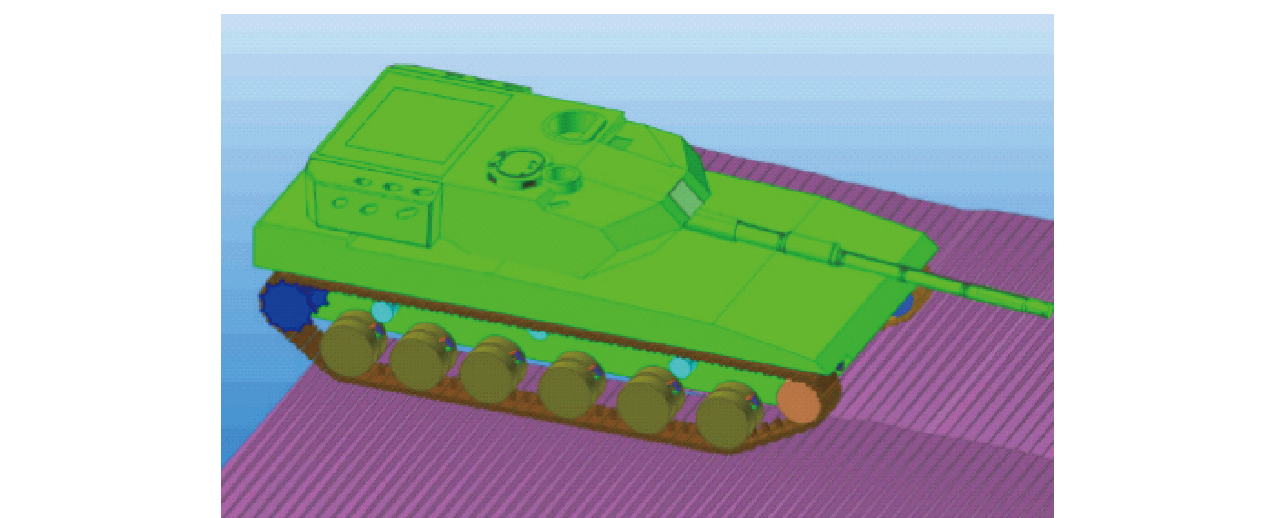
图28 整车动力学仿真环境
Fig.28 Vehicle dynamics simulation environment
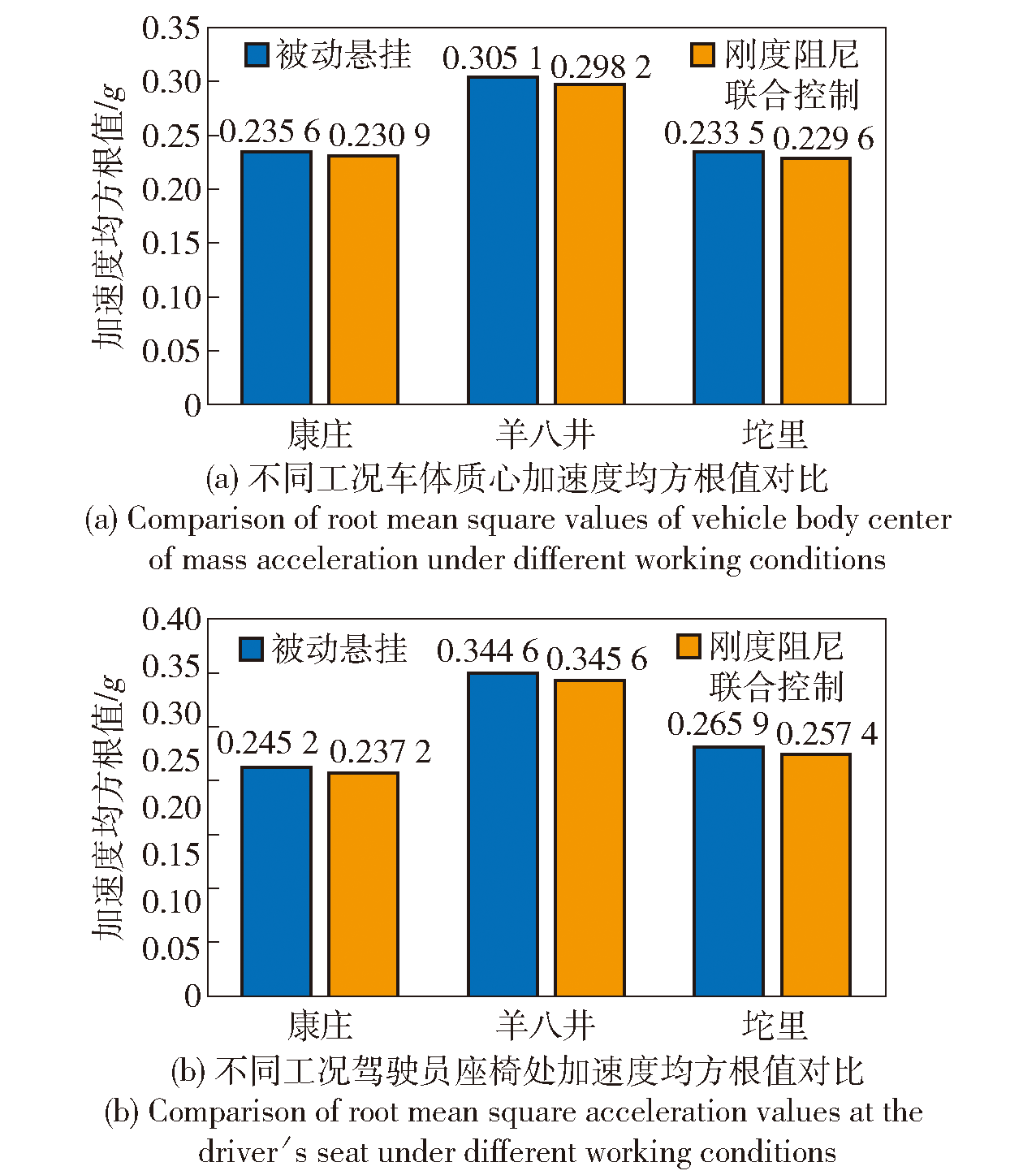
图29 3种路面加速度均方根值仿真结果
Fig.29 Simulated results of root mean square accelerations on three road surfaces
| [1] |
中华人民共和国国防部. 中国的军事战略[M]. 北京: 军事科学出版社, 2015.
|
|
Ministry of National Defense of the People’s Republic of China. China’s military strategy[M]. Beijing: Military Science Press, 2015. (in Chinese)
|
|
| [2] |
闫清东. 坦克构造与设计[M].下册. 北京: 北京理工大学出版社, 2007.
|
|
|
|
| [3] |
余志生. 汽车理论[M]. 第6版. 北京: 机械工业出版社, 2018.
|
|
|
|
| [4] |
|
| [5] |
|
| [6] |
毛明, 张亚峰, 杜甫, 等. 高机动履带车辆行驶系统中的5个科学技术问题[J]. 兵工学报, 2015, 36(8): 1546-1555.
doi: 10.3969/j.issn.1000-1093.2015.08.024 |
|
doi: 10.3969/j.issn.1000-1093.2015.08.024 |
|
| [7] |
|
| [8] |
|
| [9] |
王靖岳, 付彦植, 王浩天, 等. 随机激励下油气悬架系统的非线性振动分析[J]. 重庆理工大学学报(自然科学), 2022, 36(10):51-57.
|
|
|
|
| [10] |
孙船斌, 方琳, 童宝宏. 受饱和约束的车辆转向非线性鲁棒模糊分布控制[J]. 振动与冲击, 2022, 41(4):77-85,149.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
丁法乾, 履带式装甲车辆悬挂系统动力学[M]. 北京: 国防工业出版社, 2004.
|
|
|
|
| [18] |
陈盛钊, 戴巨川, 张舟钧禹, 等. 摆动缸式油气悬挂系统动态特性参数敏感性分析[J]. 湖南大学学报(自然科学版), 2021, 48(12): 10-18.
|
|
|
|
| [19] |
|
| [20] |
廖茂林, 宋文, 王晓勇, 等. 直动型溢流阀的流固耦合建模与动态特性研究[J]. 机械工程学报, 2021, 57(23):137-148.
doi: 10.3901/JME.2021.23.137 |
|
doi: 10.3901/JME.2021.23.137 |
|
| [21] |
李卫民, 付松松, 杨泽宇, 等. 基于流固耦合的液压阀芯均压槽多目标优化设计[J]. 液压与气动, 2023, 47(1):129-137.
doi: 10.11832/j.issn.1000-4858.2023.01.015 |
|
|
|
| [22] |
黄贤振, 栾晓刚, 朱丽莎, 等. 基于双向流固耦合的锥阀阀芯位移可靠性分析[J]. 东北大学学报:自然科学版, 2023, 44(5):667-673.
|
|
|
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [1] | 杜甫, 董明明, 汪浒江, 赵艳辉, 郑凤杰. 基于准零刚度的坦克装甲车辆半主动惯容悬架控制策略[J]. 兵工学报, 2024, 45(9): 2929-2935. |
| [2] | 王振峰, 李飞, 王新宇, 杨建森, 秦也辰. 基于交互式多模型无迹卡尔曼滤波的悬架系统状态估计[J]. 兵工学报, 2021, 42(2): 242-253. |
| [3] | 徐龙, 毛明, 陈轶杰, 杜甫, 代健健. 车辆惯容器-弹簧-阻尼器悬挂构型设计方法综述[J]. 兵工学报, 2020, 41(4): 822-832. |
| [4] | 彭虎, 张进秋, 张建, 黄大山, 韩朝帅. 并联复合式电磁悬挂模型参考多模式切换控制研究[J]. 兵工学报, 2019, 40(1): 19-28. |
| [5] | 张进秋, 王兴野, 贾进峰, 孙宜权, 李欣. 主动悬架有限频域H∞时滞控制参数影响分析及优化[J]. 兵工学报, 2018, 39(9): 1850-1857. |
| [6] | 赵雷雷, 于曰伟, 周长城, 李晓晗. 特种车辆驾驶室减振器节流阀片开度及阻尼特性研究[J]. 兵工学报, 2018, 39(4): 645-654. |
| [7] | 庞辉, 陈嘉楠, 刘凯. 汽车磁流变半主动悬架系统自适应反推跟踪控制[J]. 兵工学报, 2017, 38(7): 1430-1442. |
| [8] | 黄大山, 张进秋, 刘义乐, 张建. 车辆馈能悬挂系统滑模控制及能量管理策略研究[J]. 兵工学报, 2016, 37(12): 2185-2195. |
| [9] | 庞辉, 陈嘉楠, 梁军, 陈英. 基于模型参考方法的车辆非线性主动悬架反推控制[J]. 兵工学报, 2016, 37(10): 1761-1769. |
| [10] | 毛明, 王乐, 陈轶杰, 雷强顺, 杜甫. 惯容器及惯容器-弹簧-阻尼器悬架研究进展[J]. 兵工学报, 2016, 37(3): 525-534. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4