
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (9): 3204-3215.doi: 10.12382/bgxb.2023.0909
牛奕龙, 杨仪*( ), 张凯, 穆莹, 王奇, 王英民
), 张凯, 穆莹, 王奇, 王英民
收稿日期:2023-09-08
上线日期:2024-01-26
通讯作者:
基金资助:
NIU Yilong, YANG Yi*(), ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin
Received:2023-09-08
Online:2024-01-26
摘要:
针对应召反潜中无人水面艇航向和航速机动的情形,提出一种基于改进深度Q学习(Deep Q-learning, DQN)算法的无人艇路径规划方法。结合应召搜潜模型,引入改进的深度强化学习(Improved-DQN, I-DQN)算法,通过联合调整无人水面艇(Unmanned Surface Vessel,USV)的动作空间、动作选择策略和奖励等,获取一条最优路径。算法采用时变动态贪婪策略,根据环境和神经网络的学习效果自适应调整USV动作选择,提高全局搜索能力并避免陷入局部最优解;结合USV所处的障碍物环境和当前位置设置分段非线性奖惩函数,保证不避碰的同时提升算法收敛速度;增加贝塞尔算法对路径平滑处理。仿真结果表明,在相同环境下新方法规划效果优于DQN算法、A*算法和人工势场算法,具有更好的稳定性、收敛性和安全性。
中图分类号:
牛奕龙, 杨仪, 张凯, 穆莹, 王奇, 王英民. 基于改进DQN算法的应召搜潜无人水面艇路径规划方法[J]. 兵工学报, 2024, 45(9): 3204-3215.
NIU Yilong, YANG Yi, ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin. Path Planning Method for Unmanned Surface Vessel in On-call Submarine Search Based on Improved DQN Algorithm[J]. Acta Armamentarii, 2024, 45(9): 3204-3215.
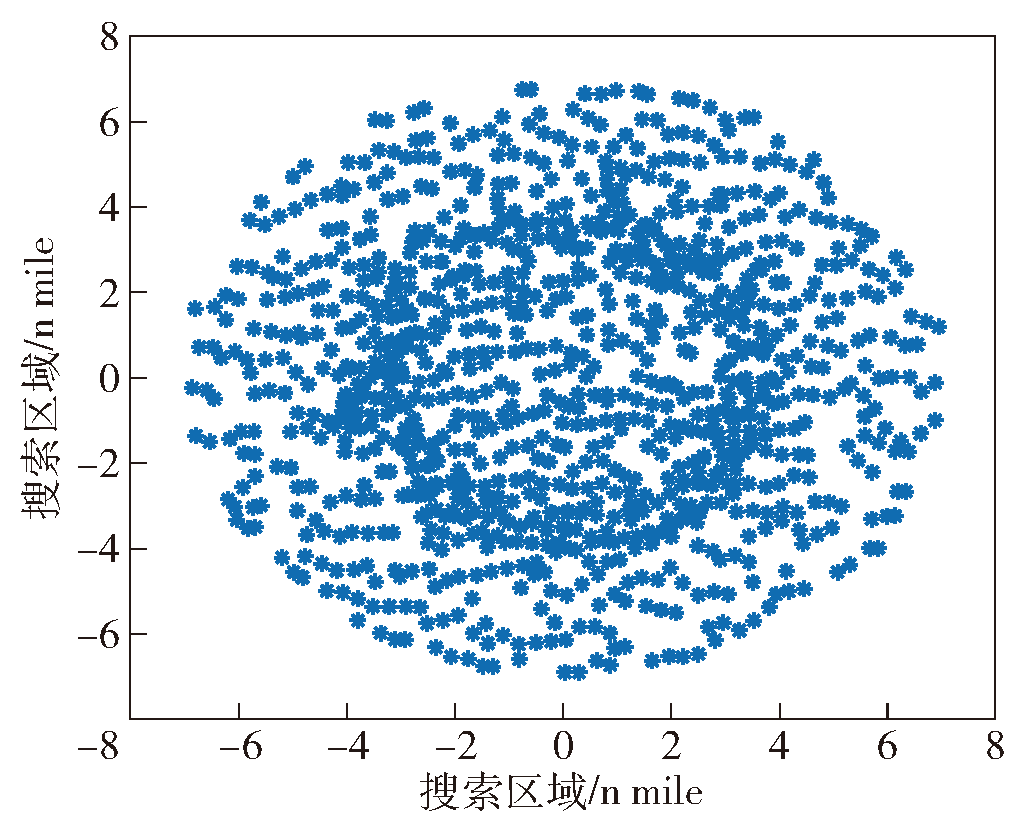
图1 航速未知时目标潜艇位置分布
Fig.1 Target submarine position distribution with unknown speed
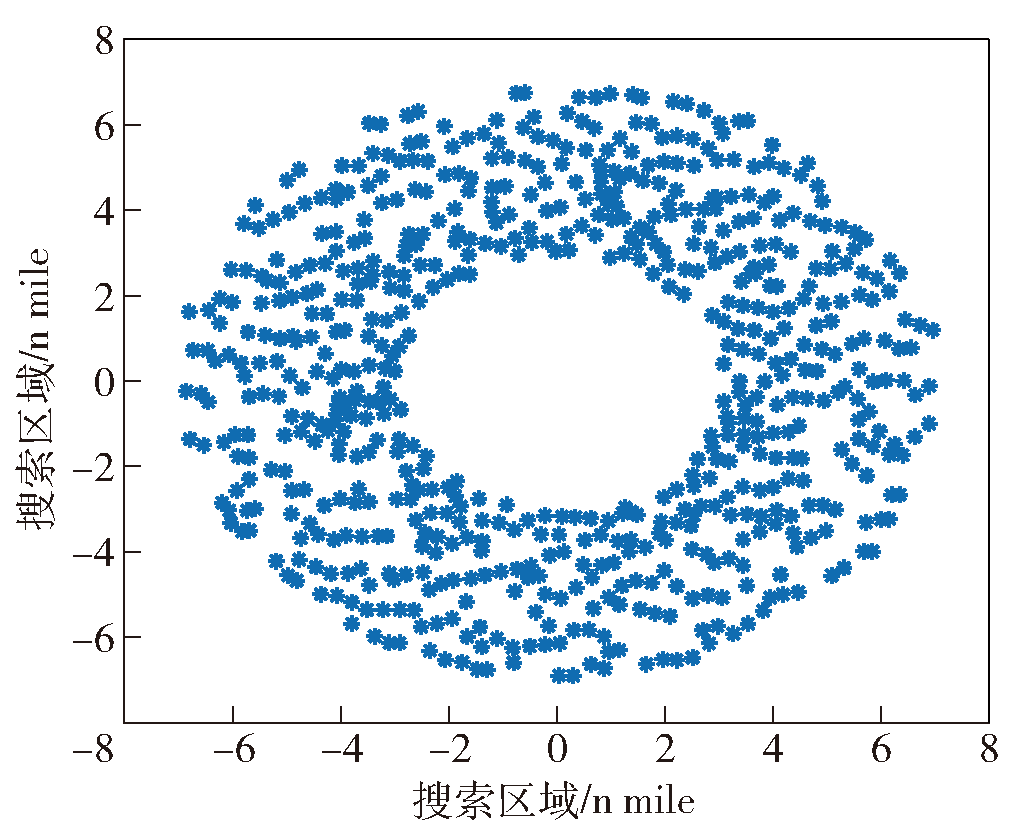
图2 航速已知时目标潜艇位置分布
Fig.2 Target submarine position distribution with known speed
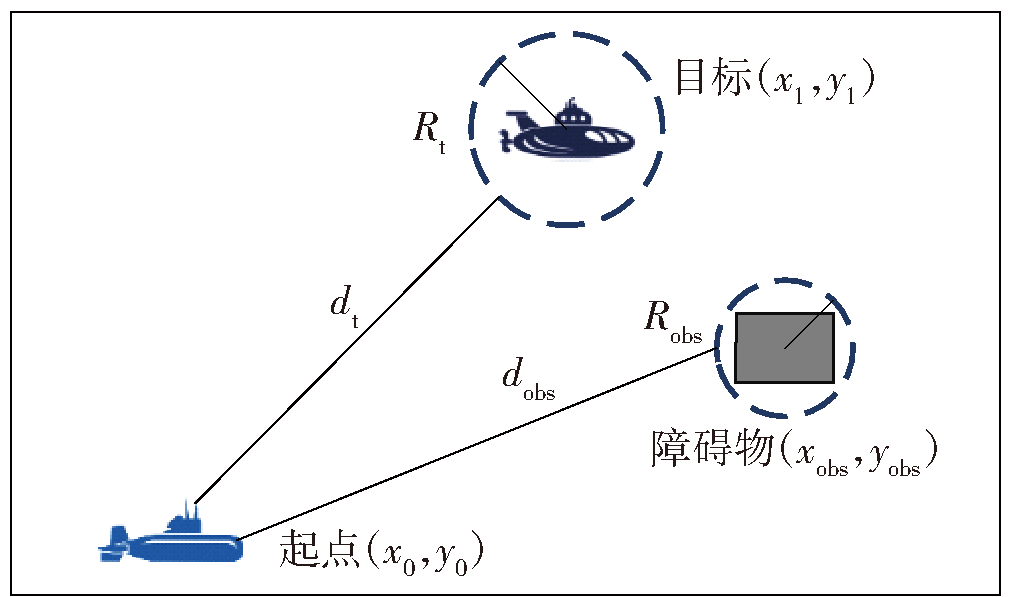
图3 USV状态空间模型
Fig.3 USV state space model
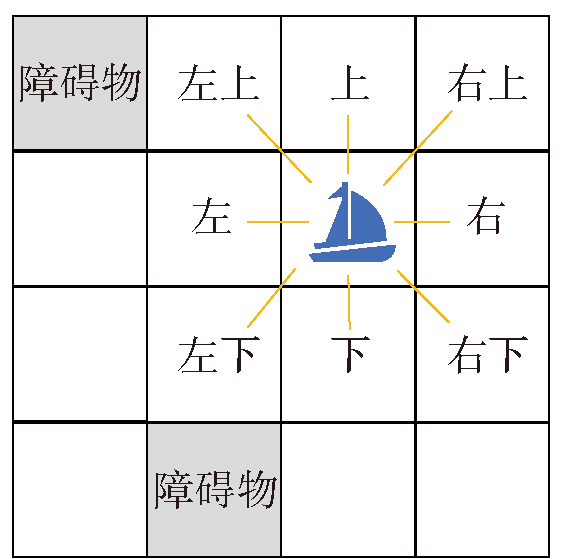
图4 动作空间优化
Fig.4 Action space optimization
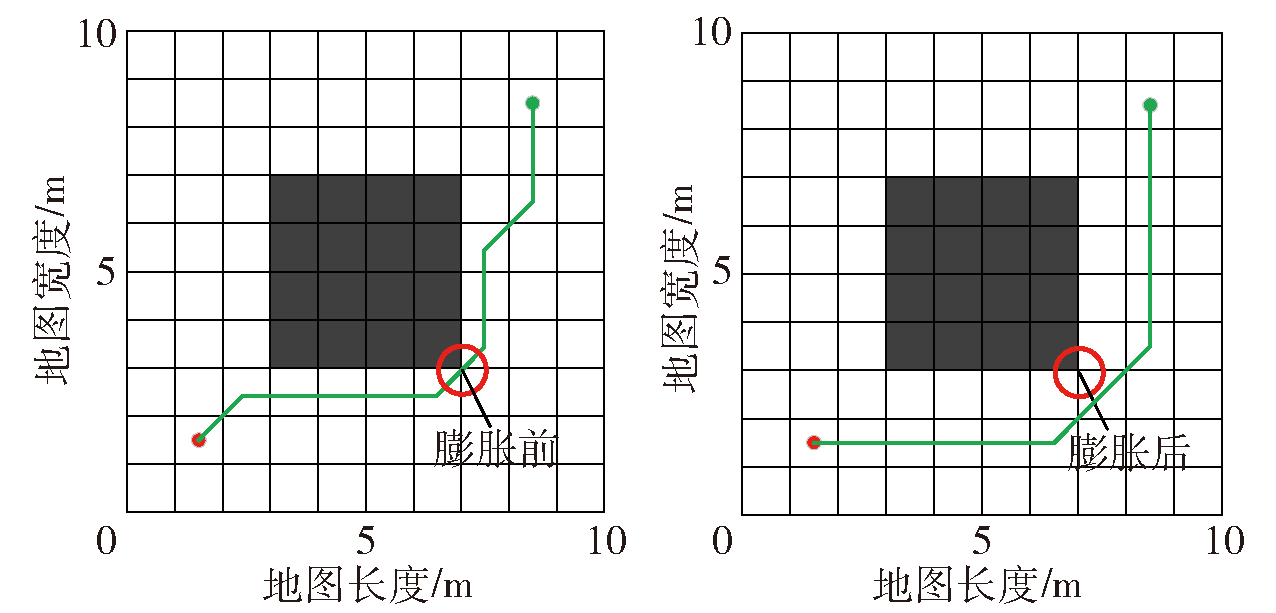
图5 膨胀前(左)后(右)路径示意图
Fig.5 Schematic diagram of path before(lift) and after(right) expansion
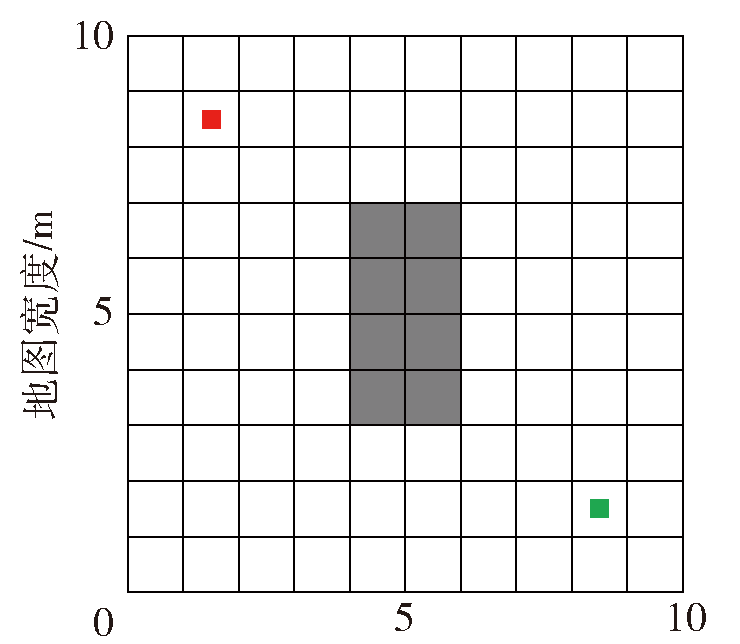
图6 仿真环境地图
Fig.6 Simulation environment
| 参数 | 数值 | 参数 | 数值 | |
|---|---|---|---|---|
| 动作空间大小 | 8 | 隐藏层个数 | 2 | |
| 学习率α | 0.01 | 神经元个数 | 64 | |
| 衰减率γ | 0.90 | 经验池大小 | 10 000 | |
| 探索率ε | [0.01,0.99] | 取样数目 | 32 |
表1 模型训练参数
Table 1 Model training parameters
| 参数 | 数值 | 参数 | 数值 | |
|---|---|---|---|---|
| 动作空间大小 | 8 | 隐藏层个数 | 2 | |
| 学习率α | 0.01 | 神经元个数 | 64 | |
| 衰减率γ | 0.90 | 经验池大小 | 10 000 | |
| 探索率ε | [0.01,0.99] | 取样数目 | 32 |
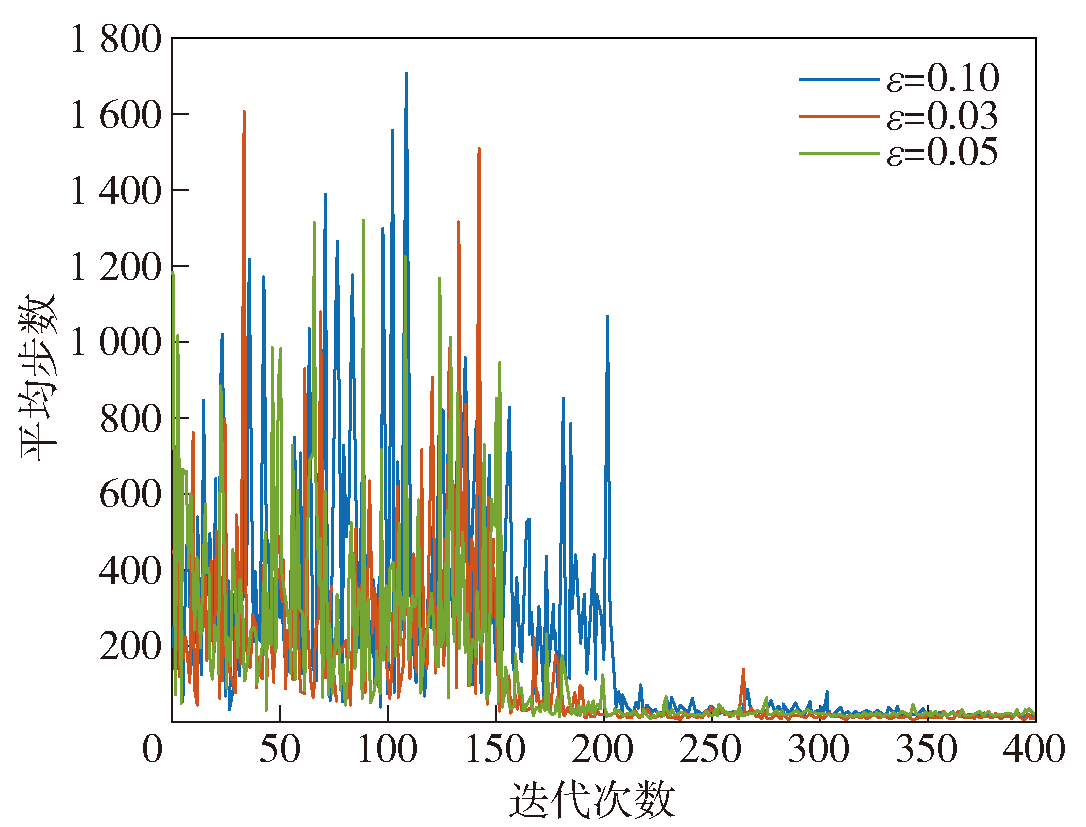
图7 ε不同取值的收敛曲线
Fig.7 Convergence curves with different values of ε
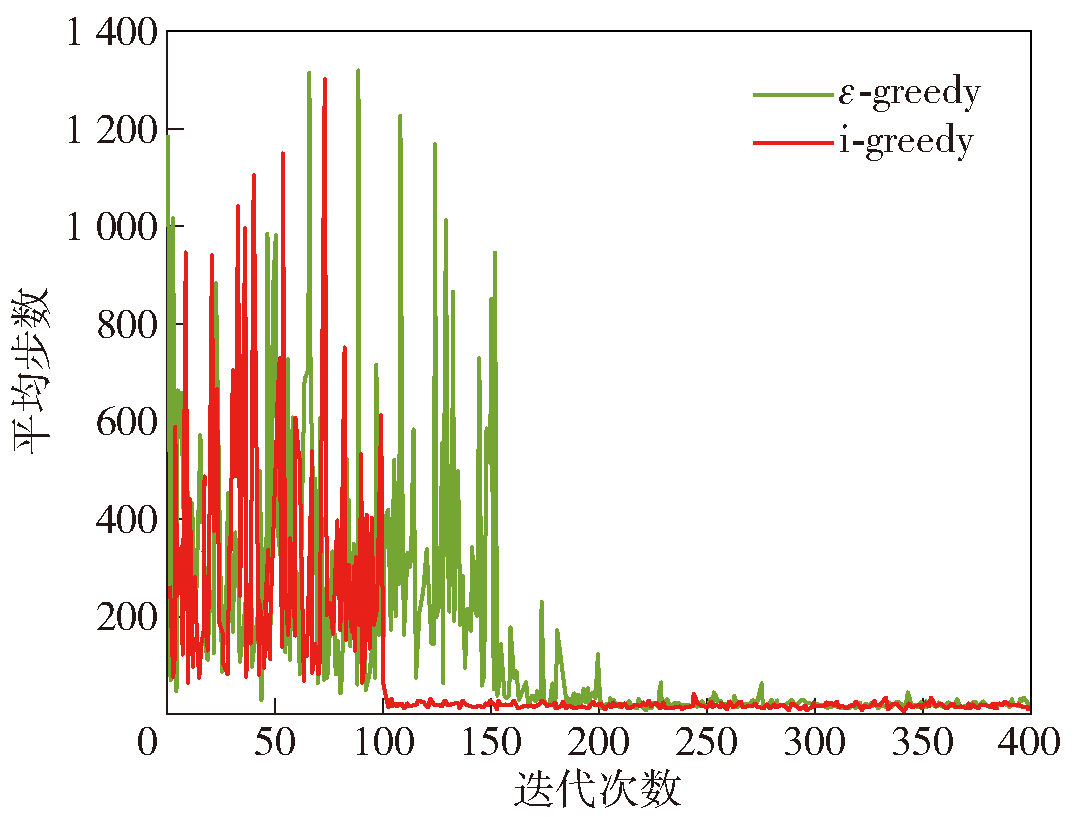
图8 策略改进前后的收敛情况对比
Fig.8 Comparison of convergences before and after strategy improvement
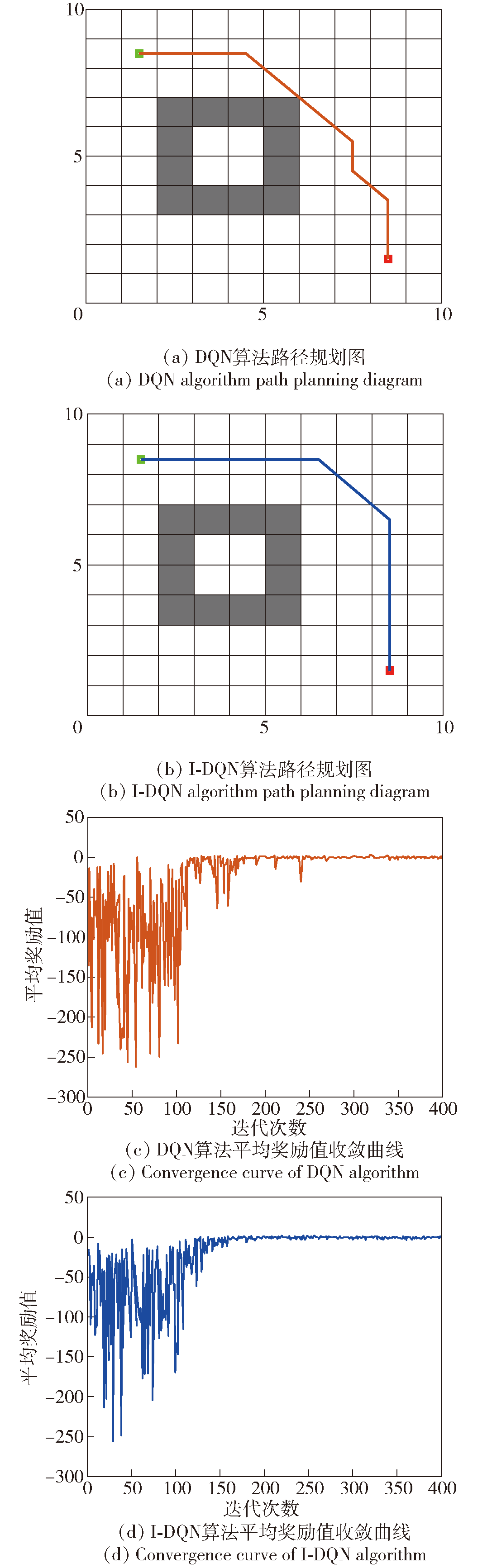
图9 10m×10m地图中的路径规划与平均奖励值对比
Fig.9 Comparison of path planning and average reward value in 10m×10m map
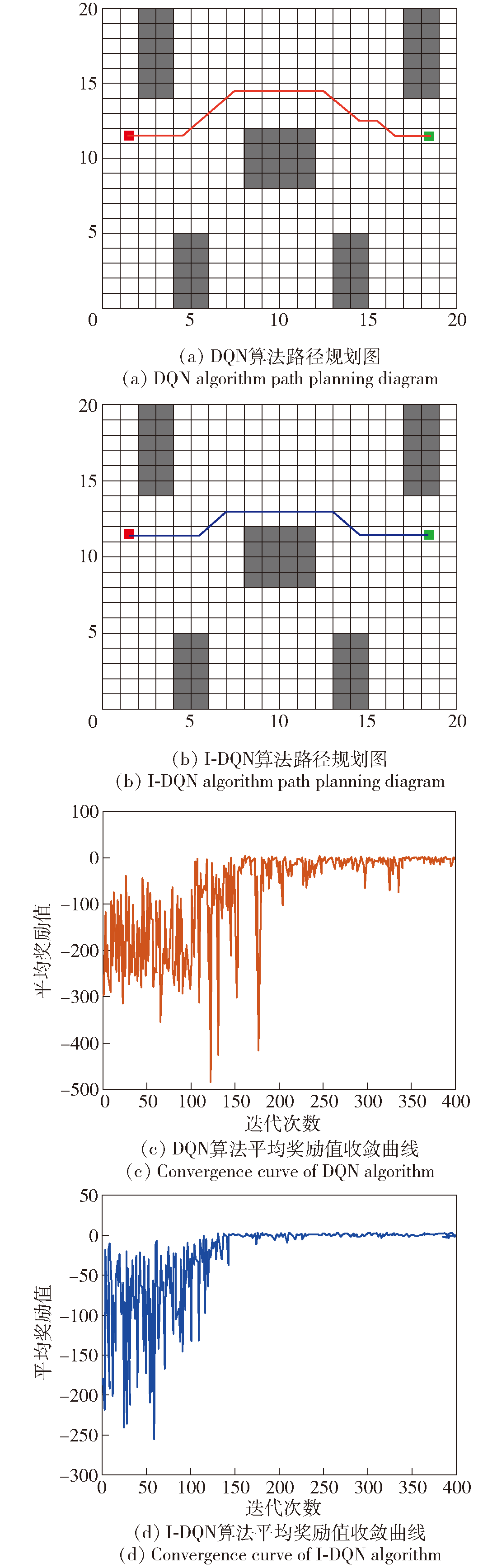
图10 20m×20m地图中的路径规划与平均奖励值对比
Fig.10 Comparison of path planning and average reward value in 20m×20m map
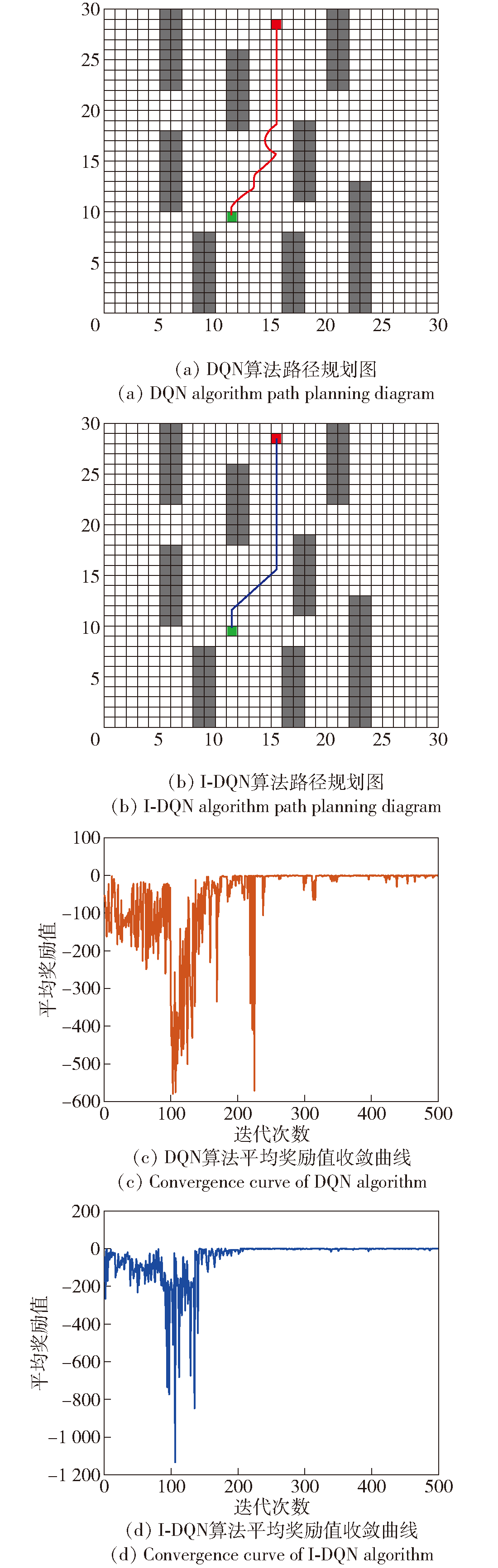
图11 30m×30m地图中的路径规划与平均奖励值对比
Fig.11 Comparison of path planning and average reward value in 30m×30m map
| 算法 | 环境 尺寸/m | 平均路径 长度/m | 迭代稳定 代数 | 拐点数 | 是否 碰撞 |
|---|---|---|---|---|---|
| 10×10 | 11.66 | 136 | 4 | 是 | |
| DQN | 20×20 | 19.48 | 156 | 6 | 否 |
| 30×30 | 21.48 | 188 | 7 | 否 | |
| 10×10 | 12.83 | 141 | 2 | 否 | |
| I-DQN | 20×20 | 18.24 | 150 | 4 | 否 |
| 30×30 | 20.66 | 169 | 2 | 否 |
表2 不同环境地图下的仿真结果
Table 2 Simulated results under different environments
| 算法 | 环境 尺寸/m | 平均路径 长度/m | 迭代稳定 代数 | 拐点数 | 是否 碰撞 |
|---|---|---|---|---|---|
| 10×10 | 11.66 | 136 | 4 | 是 | |
| DQN | 20×20 | 19.48 | 156 | 6 | 否 |
| 30×30 | 21.48 | 188 | 7 | 否 | |
| 10×10 | 12.83 | 141 | 2 | 否 | |
| I-DQN | 20×20 | 18.24 | 150 | 4 | 否 |
| 30×30 | 20.66 | 169 | 2 | 否 |
| 环境尺寸/m | 平均路径长度/% | 收敛速度/% | 拐点减少数/个 |
|---|---|---|---|
| 10×10 | -10 | -3.68 | 2 |
| 20×20 | 6 | 3.85 | 2 |
| 30×30 | 3.82 | 10.11 | 5 |
表3 I-DQN算法相比DQN算法的性能提升幅度
Table 3 Performance improvement of I-DQN compared with DQN algorithm
| 环境尺寸/m | 平均路径长度/% | 收敛速度/% | 拐点减少数/个 |
|---|---|---|---|
| 10×10 | -10 | -3.68 | 2 |
| 20×20 | 6 | 3.85 | 2 |
| 30×30 | 3.82 | 10.11 | 5 |
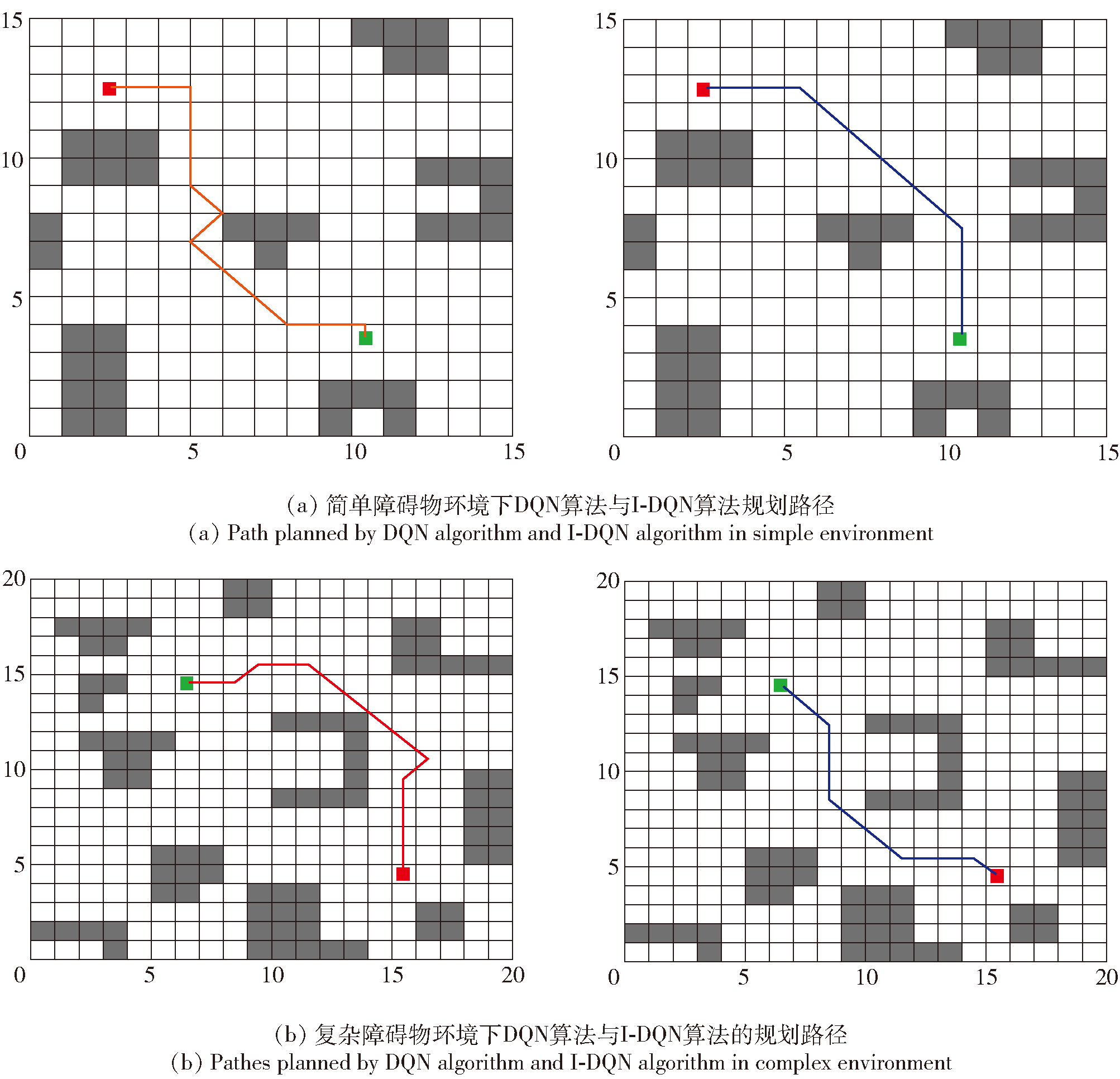
图12 不同障碍物环境下不同算法的路径规划
Fig.12 Path planning with different algorithm in different obstacles environments
| 环境 | 算法 | 平均 路径 长度/m | 避开障 碍物 数/个 | 拐点 数/个 | 平均路径 长度缩短 程度/% | 拐点数 减少数/ 个 |
|---|---|---|---|---|---|---|
| 简单 | DQN | 10.54 | 2 | 6 | 10.5 | 4 |
| I-DQN | 9.54 | 3 | 2 | |||
| 复杂 | DQN | 10.95 | 3 | 5 | 14.9 | 1 |
| I-DQN | 9.53 | 4 | 4 |
表4 简单和复杂障碍物环境下的仿真数据统计对比
Table 4 Statistical comparison of simulated data under simple and complex obstacle environments
| 环境 | 算法 | 平均 路径 长度/m | 避开障 碍物 数/个 | 拐点 数/个 | 平均路径 长度缩短 程度/% | 拐点数 减少数/ 个 |
|---|---|---|---|---|---|---|
| 简单 | DQN | 10.54 | 2 | 6 | 10.5 | 4 |
| I-DQN | 9.54 | 3 | 2 | |||
| 复杂 | DQN | 10.95 | 3 | 5 | 14.9 | 1 |
| I-DQN | 9.53 | 4 | 4 |
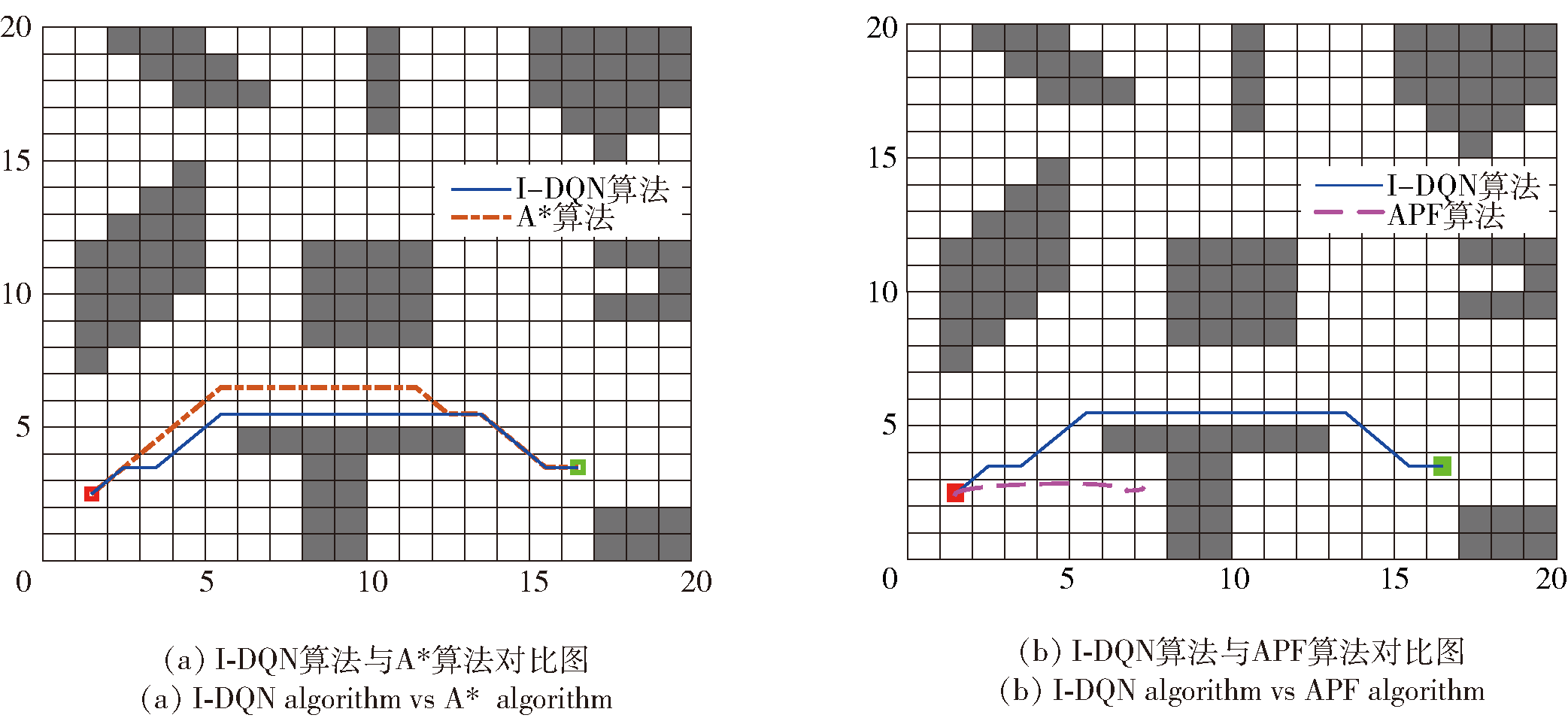
图13 起点和终点位于T型障碍物两侧的算法对比
Fig.13 Algorithm comparison of starting point and ending point on both sides of T-shaped obstacle
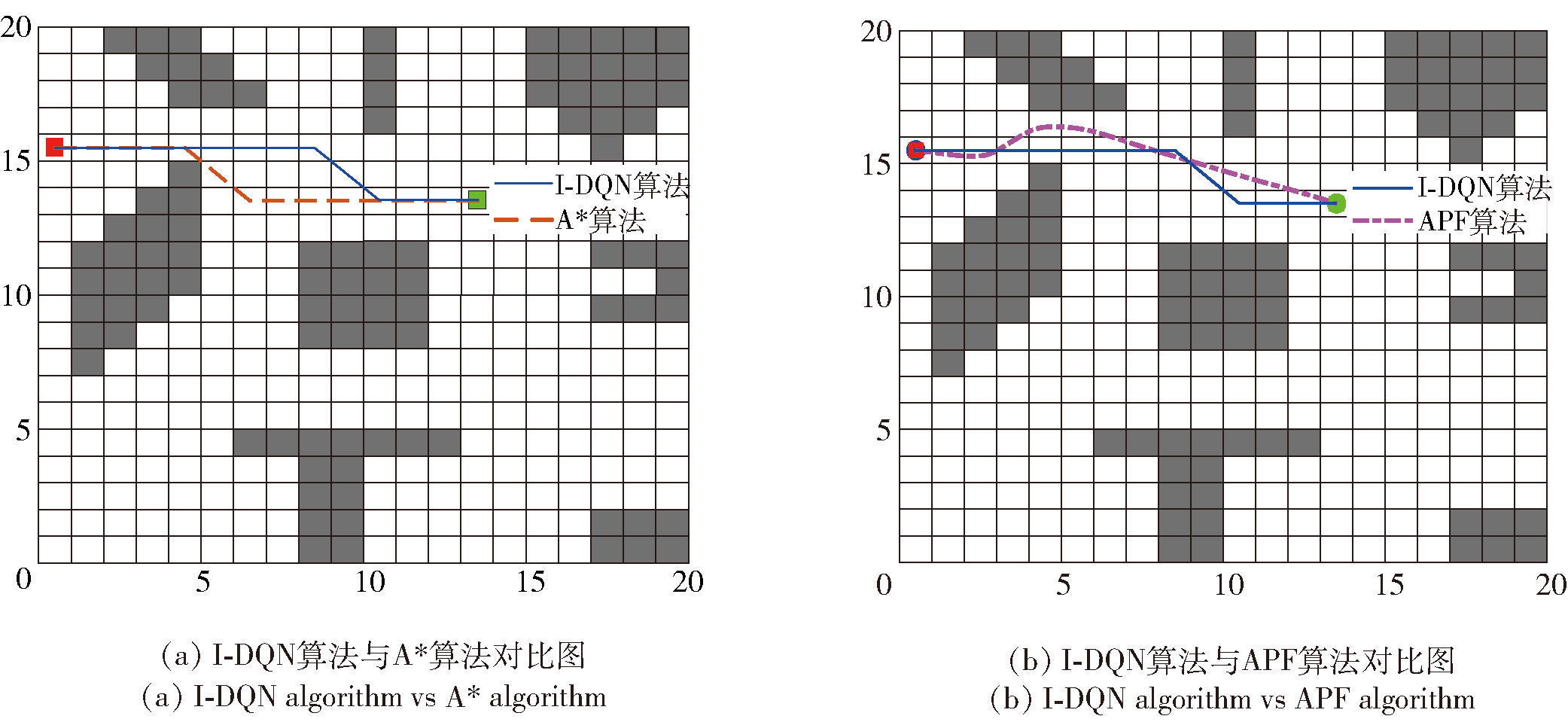
图14 路径通过狭窄可行域的算法对比
Fig.14 Algorithm comparison of the path passing through the narrow feasible region
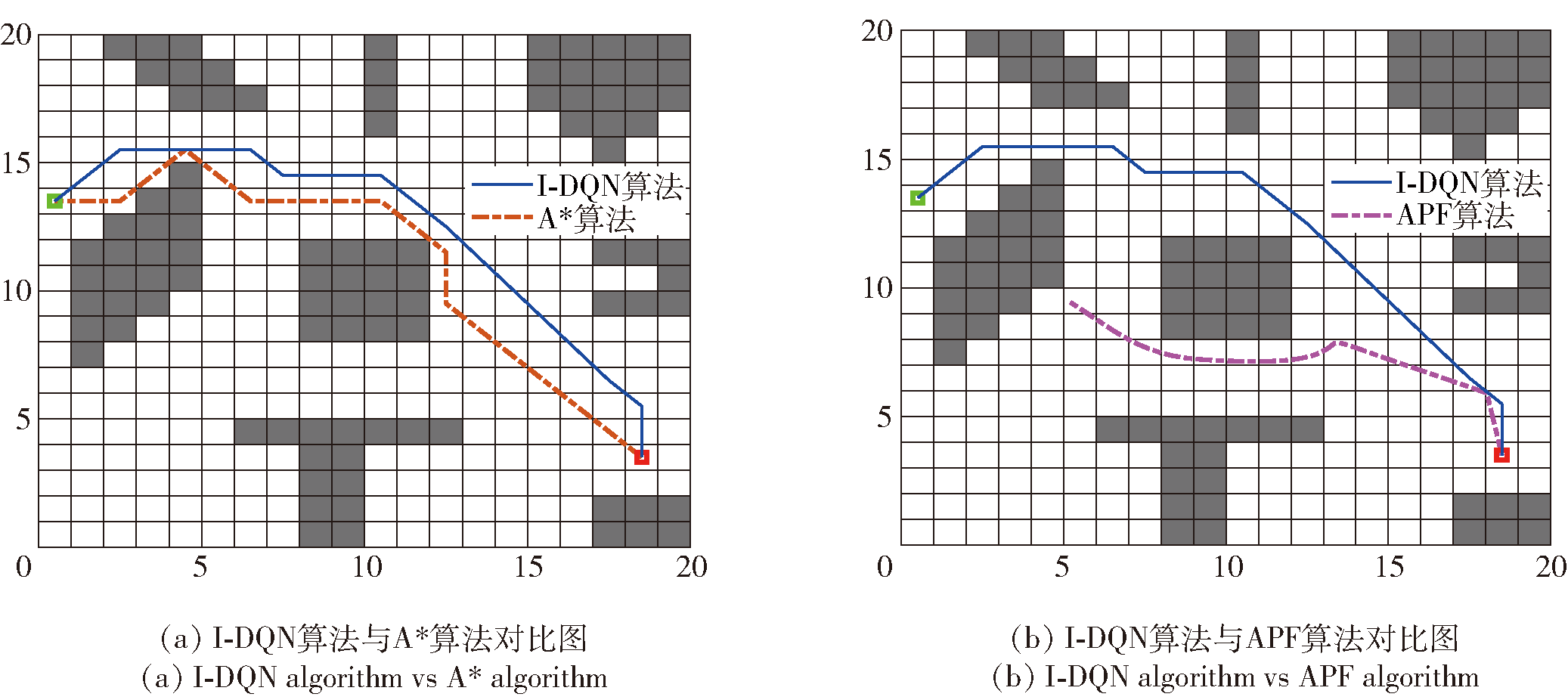
图15 起点和终点分布在障碍物附近的算法对比
Fig.15 Algorithm comparison of starting point and ending point distributed near obstacles
| 算法 | 起点和终点位置 | 是否完 成任务 | 路径 长度/m | 是否 碰撞 | 拐点 数 |
|---|---|---|---|---|---|
| T型障碍物两侧 | 是 | 17.90 | 否 | 5 | |
| A* | 狭窄可行域 | 是 | 13.83 | 是 | 2 |
| 障碍物附近 | 是 | 24.97 | 是 | 6 | |
| T型障碍物两侧 | 否 | ||||
| APF | 狭窄可行域 | 是 | 16.17 | 否 | |
| 障碍物附近 | 否 | ||||
| T型障碍物两侧 | 是 | 17.07 | 否 | 5 | |
| I-DQN | 狭窄可行域 | 是 | 13.83 | 否 | 2 |
| 障碍物附近 | 是 | 25.97 | 否 | 5 |
表5 不同测试场景下各指标对比
Table 5 Comparison of indicators under different test conditions
| 算法 | 起点和终点位置 | 是否完 成任务 | 路径 长度/m | 是否 碰撞 | 拐点 数 |
|---|---|---|---|---|---|
| T型障碍物两侧 | 是 | 17.90 | 否 | 5 | |
| A* | 狭窄可行域 | 是 | 13.83 | 是 | 2 |
| 障碍物附近 | 是 | 24.97 | 是 | 6 | |
| T型障碍物两侧 | 否 | ||||
| APF | 狭窄可行域 | 是 | 16.17 | 否 | |
| 障碍物附近 | 否 | ||||
| T型障碍物两侧 | 是 | 17.07 | 否 | 5 | |
| I-DQN | 狭窄可行域 | 是 | 13.83 | 否 | 2 |
| 障碍物附近 | 是 | 25.97 | 否 | 5 |
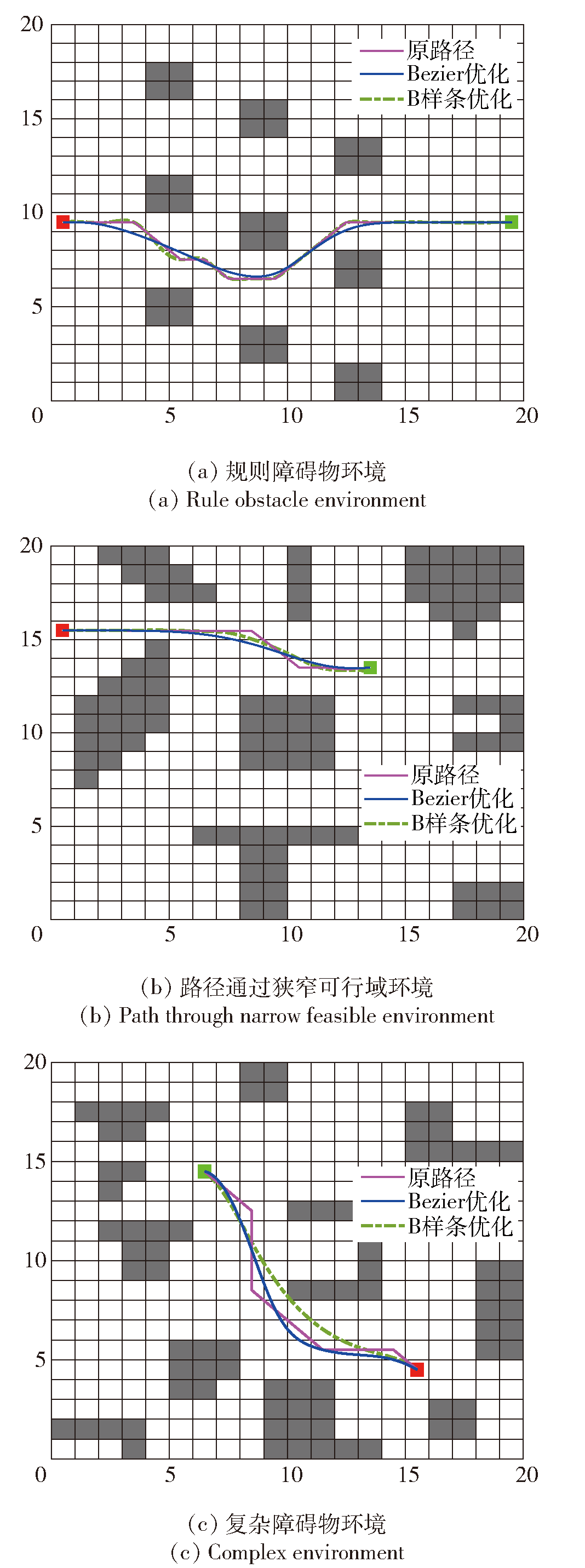
图16 路径优化方法对比
Fig.16 Comparison of path optimization methods
| [1] |
|
| [2] |
郑荣, 辛传龙, 汤钟, 等. 无人水面艇自主部署自主水下机器人平台技术综述[J]. 兵工学报, 2020, 41(8):1675-1687.
doi: 10.3969/j.issn.1000-1093.2020.08.022 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.022 |
|
| [3] |
|
| [4] |
刘佳, 王杰. 无人水面艇避障路径规划算法综述[J]. 计算机应用与软件, 2020, 37(8):1-10, 20.
|
|
|
|
| [5] |
李元昊, 段鹏飞, 郭绍义, 等. 船舶全局路径规划相关算法研究综述[J]. 船舶标准化工程师, 2022, 55(5):26-30,55.
|
|
|
|
| [6] |
陶亚东, 张会霞, 于海深. 水面无人艇全局路径规划常用算法简述[J]. 应用数学进展, 2022, 11(3):1400-1405.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
张沫, 吴一卓. 基于A*算法的搬运机器人路径规划优化[J]. 现代电子技术, 2023, 46(13):135-139.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
孙玉山, 王力锋, 吴菁, 等. 智能水下机器人路径规划方法综述[J]. 舰船科学技术, 2020, 42(4):1-7.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
李涛, 彭耿, 刘磊. 远海目标散布模型研究及特性分析[J]. 战术导弹技术, 2021(3):20-27.
|
|
|
|
| [20] |
崔东华, 纪秀美, 代志恒, 等. 基于瑞利-均匀分布的AUV应召搜索目标散布区域估计方法[J]. 水下无人系统学报, 2021, 29(5):580-585.
|
|
|
|
| [21] |
张宁, 寇小明, 李斌, 等. 基于遗传算法的应召搜潜路径优化[J]. 水下无人系统学报, 2023, 31(2):244-251.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
王冰晨, 连晓峰, 颜湘, 等. 基于深度Q网络和人工势场的移动机器人路径规划研究[J]. 计算机测量与控制, 2022, 30(11): 226-232,239.
|
|
|
|
| [26] |
许志远. 基于改进神经网络的船舶航行路径规划[J]. 舰船科学技术, 2022, 44(14):57-60.
|
|
|
|
| [27] |
徐晗, 金隼, 罗磊, 等. 基于拓扑栅格建模的AGV路径规划算法优化[J]. 计算机工程与设计, 2022, 43(1):101-109.
|
|
|
|
| [28] |
|
| [29] |
张家闻, 房浩霖, 李家旺. 基于复杂约束条件的欠驱动AUV三维路径规划[J]. 兵工学报, 2022, 43(6): 1407-1414.
doi: 10.12382/bgxb.2021.0340 |
|
doi: 10.12382/bgxb.2021.0340 |
|
| [30] |
|
| [1] | 田洪清, 马明涛, 张博, 郑讯佳. 越野环境下势场搜索树智能车辆路径规划方法[J]. 兵工学报, 2024, 45(7): 2110-2127. |
| [2] | 姬鹏, 郭明皓. 基于Frenet坐标下改进人工势场法的无人车局部路径规划[J]. 兵工学报, 2024, 45(7): 2097-2109. |
| [3] | 王霄龙, 陈洋, 胡棉, 李旭东. 基于改进深度Q网络的机器人持续监测路径规划[J]. 兵工学报, 2024, 45(6): 1813-1823. |
| [4] | 潘作栋, 周悦, 郭威, 徐高飞, 孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128. |
| [5] | 李松, 麻壮壮, 张蕴霖, 邵晋梁. 基于安全强化学习的多智能体覆盖路径规划[J]. 兵工学报, 2023, 44(S2): 101-113. |
| [6] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [7] | 陶俊峰, 刘海鸥, 关海杰, 陈慧岩, 臧政. 基于可通行度估计的无人履带车辆路径规划[J]. 兵工学报, 2023, 44(11): 3320-3332. |
| [8] | 胡致远, 王征, 杨洋, 尹洋. 基于人工鱼群-蚁群算法的UUV三维全局路径规划[J]. 兵工学报, 2022, 43(7): 1676-1684. |
| [9] | 郭威, 吴凯, 周悦, 孙洪鸣, 徐高飞, 高森. 基于蚁群算法的深海着陆车路径规划[J]. 兵工学报, 2022, 43(6): 1387-1394. |
| [10] | 张韬, 项祺, 郑婉文, 孙宇祥, 周献中. 基于改进A*算法的路径规划在海战兵棋推演中的应用[J]. 兵工学报, 2022, 43(4): 960-968. |
| [11] | 陈雨荻, 熊智, 刘建业, 杨闯, 晁丽君, 彭杨. 基于海马体的面向未知复杂环境类脑导航技术综述[J]. 兵工学报, 2022, 43(11): 2965-2980. |
| [12] | 赵鹏程, 宋保维, 毛昭勇, 丁文俊. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10): 2598-2608. |
| [13] | 田洪清, 王建强, 黄荷叶, 丁峰. 越野环境下基于势能场模型的智能车概率图路径规划方法[J]. 兵工学报, 2021, 42(7): 1496-1505. |
| [14] | 郑荣, 辛传龙, 汤钟, 宋涛. 无人水面艇自主部署自主水下机器人平台技术综述[J]. 兵工学报, 2020, 41(8): 1675-1687. |
| [15] | 邓海鹏, 麻斌, 赵海光, 吕良, 刘宇. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3): 585-594. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4