
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (8): 240997-.doi: 10.12382/bgxb.2024.0997
张越, 张宁*( ), 徐熙平**(), 潘越
), 徐熙平**(), 潘越
收稿日期:2024-10-28
上线日期:2025-08-28
通讯作者:
基金资助:
ZHANG Yue, ZHANG Ning*(), XU Xiping**(), PAN Yue
Received:2024-10-28
Online:2025-08-28
摘要:
针对传统蜣螂优化(Dung Beetle Optimization,DBO)算法在复杂环境下无人机航迹规划中表现出的稳定性差、寻优能力不足问题,提出一种融合复合种群策略与自适应t分布扰动的DBO算法(Group-based Optimization and adaptive t-Distribution DBO optimization algorithm,GOTDBO)。GOTDBO在DBO算法的基础上,结合复合种群初始化策略、自适应扰动全局勘探策略和自适应t分布扰动策略,可有效提升算法的全局探索和局部开发能力,提高算法的收敛速度。通过构建综合考虑总飞行长度、转角弯度和最大飞行方向变化的目标函数,并引入惩罚函数法处理路径中的禁飞区和其他约束,进一步优化航迹的平滑性与安全性。实验结果表明,在航程上,在不同复杂环境的场景中应用GOTDBO算法规划航程时,该算法能规划出紧凑高效的航迹,在最大航程指标上表现出色,可有效提升续航经济性;在威胁规避方面,采用GOTDBO算法规划的航迹接近威胁区域的次数最少,飞行安全性更高;在高度控制上,高度偏离程度低,能稳定精准控高。虽在航迹平滑度上与其他算法相当,但GOTDBO算法在多核心指标上优势显著,在无人机航迹规划中节能高效、安全可靠,具有高应用价值与广阔前景。
中图分类号:
张越, 张宁, 徐熙平, 潘越. 基于GOTDBO算法的复杂约束条件下无人机航迹规划[J]. 兵工学报, 2025, 46(8): 240997-.
ZHANG Yue, ZHANG Ning, XU Xiping, PAN Yue. UAV Trajectory Planning under Complex Constraints Based on GOTDBO Algorithm[J]. Acta Armamentarii, 2025, 46(8): 240997-.
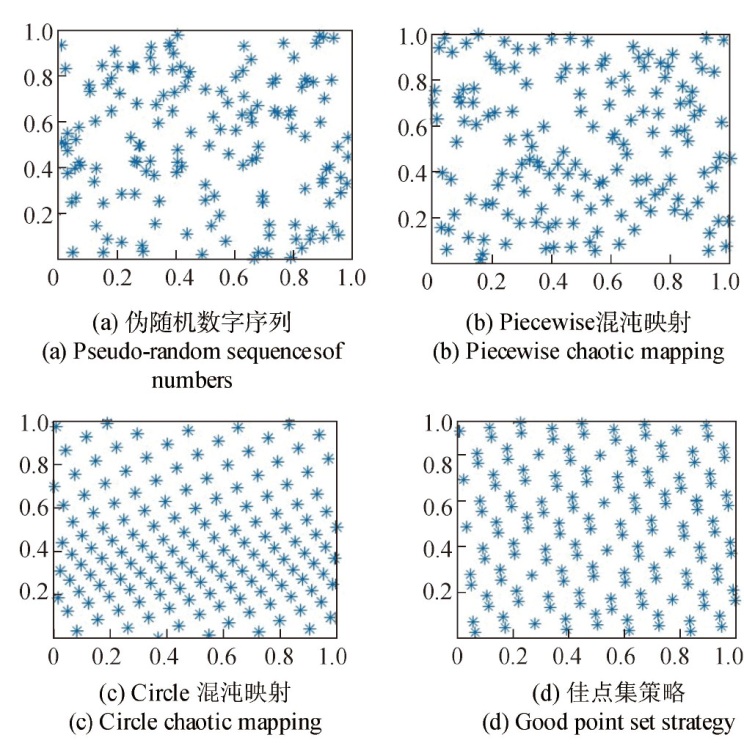
图1 4种方法生成个体二维分布图
Fig.1 Four methods to generate individual two-dimensional distribution maps
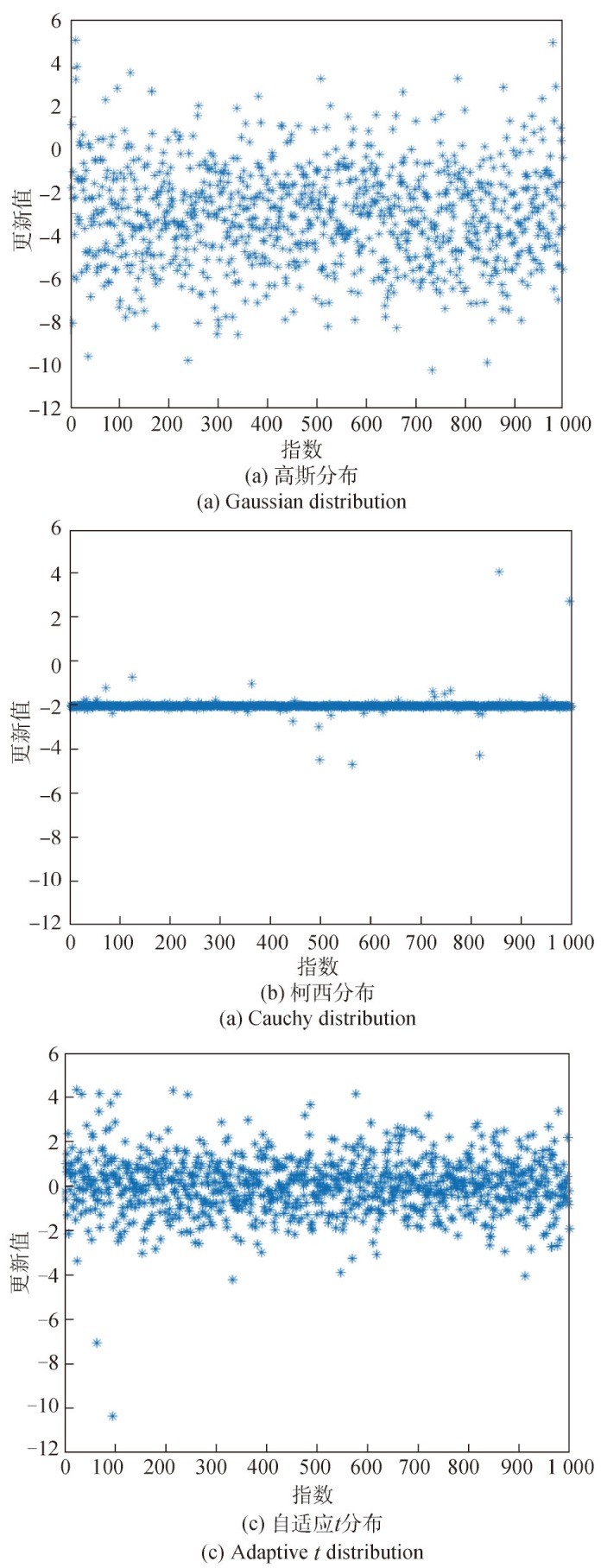
图2 3种分布函数散点图
Fig.2 Scatter plots of three distribution functions
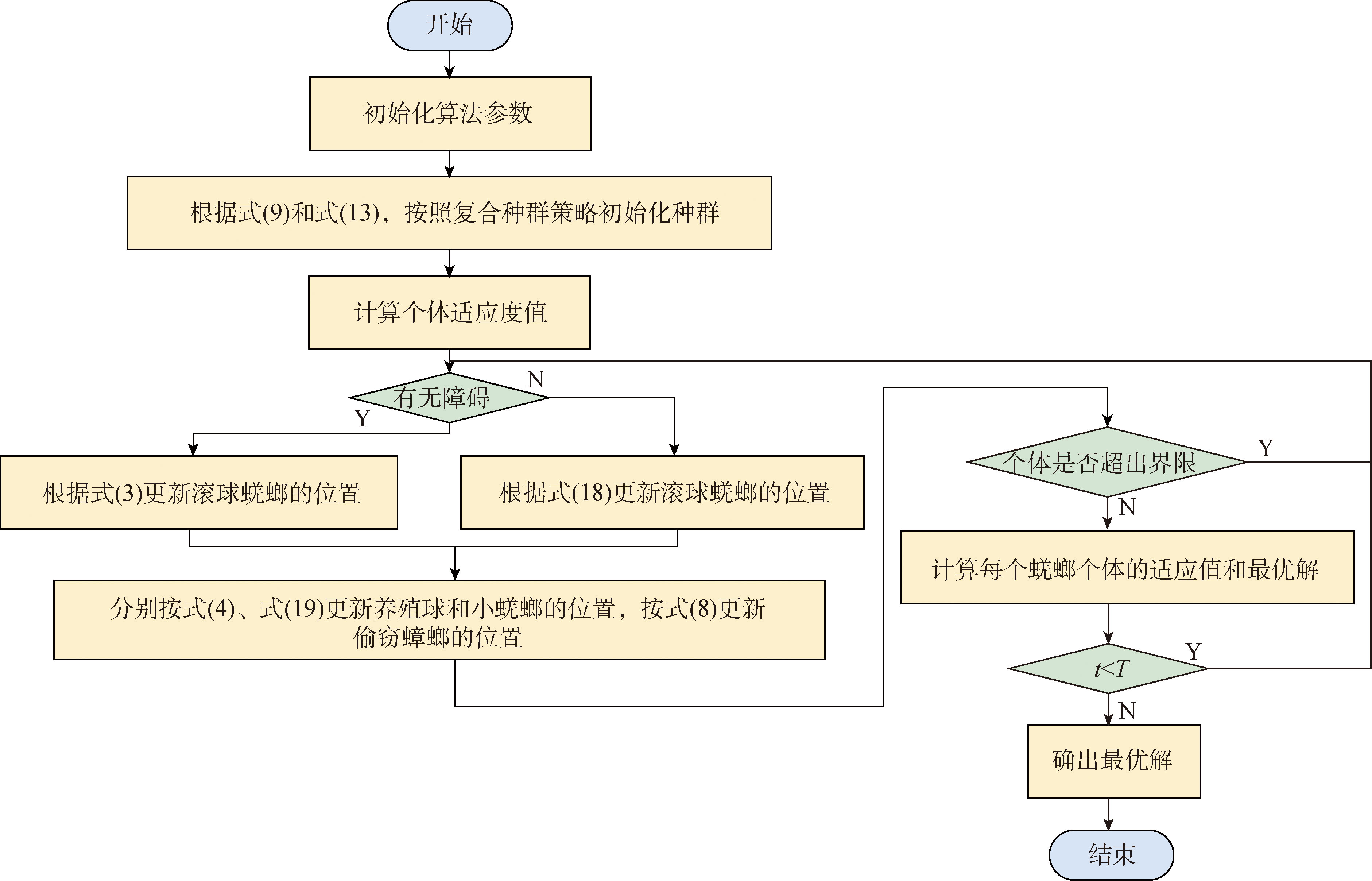
图3 GOTDBO算法流程图
Fig.3 Flowchart of GOTDBO algorithm
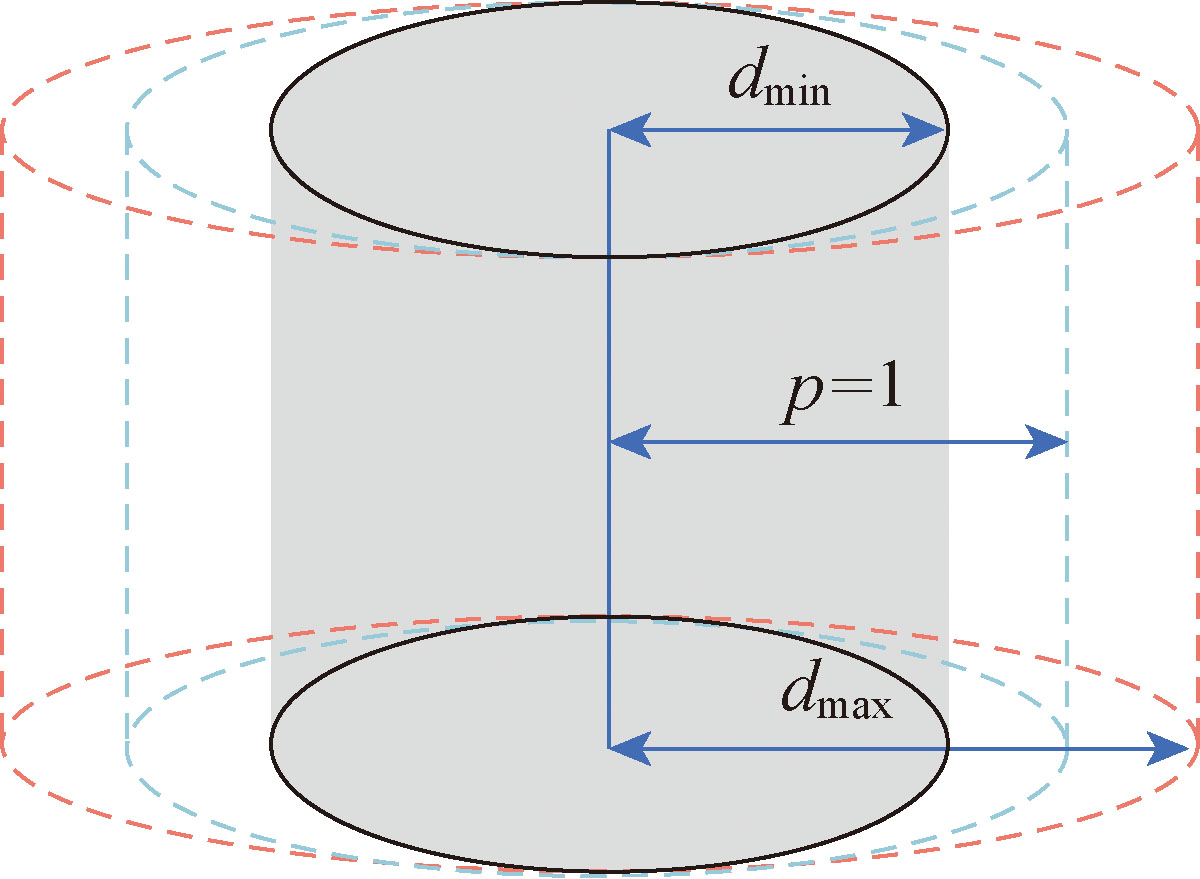
图4 禁飞区域模型示意图
Fig.4 Schematic diagram of no-fly zone model
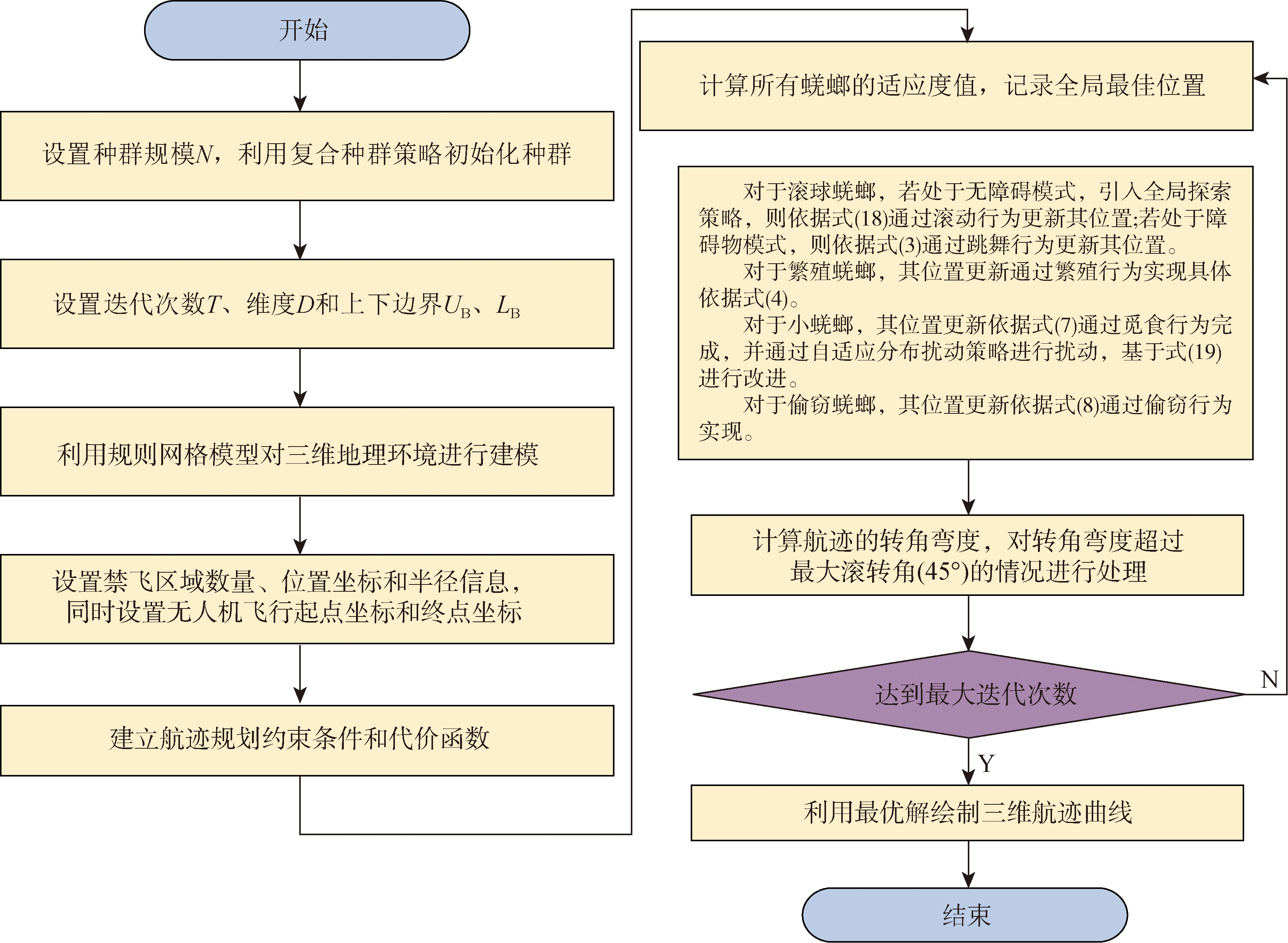
图5 基于GOTDBO算法的航迹规划流程图
Fig.5 Flowchart of trajectory planning based on GOTDBO algorithm
| 类型 | 序号 | 函数 | 最优值 |
|---|---|---|---|
| 单峰 函数 | F1 | Shifted and Rotated Bent Cigar Function | 100 |
| F2 | Shifted and Rotated Zakharov Function | 300 | |
| 多峰 函数 | F3 | Shifted and Rotated Rosenbrock's Function | 400 |
| F4 | Shifted and Rotated Rastrigin's Function | 500 | |
| F5 | Shifted and Rotated Expanded Scaffer's F6 Function | 600 | |
| F6 | Shifted and Rotated Lunacek Bi-Rastrigin's function | 700 | |
| F7 | Shifted and Rotated Non-Continious Rastrigin's function | 800 | |
| F8 | Shifted and Rotated Levy Function | 900 | |
| F9 | Shifted and Rotated Schwefel's Function | 1000 | |
| 混合 函数 | F10 | Hybrid Function 1(N=3) | 1100 |
| F11 | Hybrid Function 2(N=3) | 1200 | |
| F12 | Hybrid Function 3(N=3) | 1300 | |
| F13 | Hybrid Function 4(N=3) | 1400 | |
| F14 | Hybrid Function 5(N=3) | 1500 | |
| F15 | Hybrid Function 6(N=3) | 1600 | |
| F16 | Hybrid Function 6(N=4) | 1700 | |
| F17 | Hybrid Function 6(N=5) | 1800 | |
| F18 | Hybrid Function 6(N=6) | 1900 | |
| F19 | Hybrid Function 6(N=7) | 2000 | |
| 组合 函数 | F20 | Composition Function 1(N=3) | 2100 |
| F21 | Composition Function 2(N=3) | 2200 | |
| F22 | Composition Function 3(N=4) | 2300 | |
| F23 | Composition Function 4(N=4) | 2400 | |
| F24 | Composition Function 5(N=5) | 2500 | |
| F25 | Composition Function 6(N=5) | 2600 | |
| F26 | Composition Function 7(N=6) | 2700 | |
| F27 | Composition Function 8(N=6) | 2800 | |
| F28 | Composition Function 9(N=3) | 2900 | |
| F29 | Composition Function 10 (N=3) | 3000 | |
| 维度(D):[-100,100]D | |||
表1 CEC2017测试函数信息
Table 1 Information of CEC2017 test function
| 类型 | 序号 | 函数 | 最优值 |
|---|---|---|---|
| 单峰 函数 | F1 | Shifted and Rotated Bent Cigar Function | 100 |
| F2 | Shifted and Rotated Zakharov Function | 300 | |
| 多峰 函数 | F3 | Shifted and Rotated Rosenbrock's Function | 400 |
| F4 | Shifted and Rotated Rastrigin's Function | 500 | |
| F5 | Shifted and Rotated Expanded Scaffer's F6 Function | 600 | |
| F6 | Shifted and Rotated Lunacek Bi-Rastrigin's function | 700 | |
| F7 | Shifted and Rotated Non-Continious Rastrigin's function | 800 | |
| F8 | Shifted and Rotated Levy Function | 900 | |
| F9 | Shifted and Rotated Schwefel's Function | 1000 | |
| 混合 函数 | F10 | Hybrid Function 1(N=3) | 1100 |
| F11 | Hybrid Function 2(N=3) | 1200 | |
| F12 | Hybrid Function 3(N=3) | 1300 | |
| F13 | Hybrid Function 4(N=3) | 1400 | |
| F14 | Hybrid Function 5(N=3) | 1500 | |
| F15 | Hybrid Function 6(N=3) | 1600 | |
| F16 | Hybrid Function 6(N=4) | 1700 | |
| F17 | Hybrid Function 6(N=5) | 1800 | |
| F18 | Hybrid Function 6(N=6) | 1900 | |
| F19 | Hybrid Function 6(N=7) | 2000 | |
| 组合 函数 | F20 | Composition Function 1(N=3) | 2100 |
| F21 | Composition Function 2(N=3) | 2200 | |
| F22 | Composition Function 3(N=4) | 2300 | |
| F23 | Composition Function 4(N=4) | 2400 | |
| F24 | Composition Function 5(N=5) | 2500 | |
| F25 | Composition Function 6(N=5) | 2600 | |
| F26 | Composition Function 7(N=6) | 2700 | |
| F27 | Composition Function 8(N=6) | 2800 | |
| F28 | Composition Function 9(N=3) | 2900 | |
| F29 | Composition Function 10 (N=3) | 3000 | |
| 维度(D):[-100,100]D | |||
| 算法 | 参数设定 |
|---|---|
| DBO[ | 自然系数α∈(0.1,0.9),偏转系数β属于(0.1~1.0),蜣螂偏转角θ∈(0°,180°),随机数r∈(0.1,1.0) |
| SABO[ | 电荷因子C从0.5~2.0,动力因子D1从2线性递减至0,吸引力系数k∈(0.1,0.9) |
| GWO[ | 参数α从2线性递减至0 |
| WOA[ | α从2线性递减至0,b=1 |
| NGO[ | 自然系数α∈(0.1,0.9),生长率β∈(0.1,1.0) |
| HHO[ | t=0,吸引力因子A∈(0.1,1.0),竞争因子C∈(0.1,1.0) |
表2 优化算法的参数值
Table 2 Parameter values for the optimization algorithms
| 算法 | 参数设定 |
|---|---|
| DBO[ | 自然系数α∈(0.1,0.9),偏转系数β属于(0.1~1.0),蜣螂偏转角θ∈(0°,180°),随机数r∈(0.1,1.0) |
| SABO[ | 电荷因子C从0.5~2.0,动力因子D1从2线性递减至0,吸引力系数k∈(0.1,0.9) |
| GWO[ | 参数α从2线性递减至0 |
| WOA[ | α从2线性递减至0,b=1 |
| NGO[ | 自然系数α∈(0.1,0.9),生长率β∈(0.1,1.0) |
| HHO[ | t=0,吸引力因子A∈(0.1,1.0),竞争因子C∈(0.1,1.0) |
| 函数 | 指标 | GOTDBO | DBO | SABO | GWO | NGO | WOA | HHO |
|---|---|---|---|---|---|---|---|---|
| F1 | Avg | 3.84×103 | 5.47×107 | 7.30×109 | 1.73×109 | 2.29×105 | 4.82×108 | 2.29×107 |
| Std | 5.23×103 | 6.96×107 | 2.71×109 | 1.56×109 | 2.56×105 | 2.30×108 | 6.23×106 | |
| F2 | Avg | 2.35×104 | 9.80×104 | 5.66×104 | 4.30×104 | 5.37×104 | 2.52×105 | 2.87×104 |
| Std | 6.52×103 | 3.23×104 | 6.55×103 | 1.05×104 | 5.77×103 | 7.38×104 | 6.15×103 | |
| F3 | Avg | 4.95×102 | 5.85×102 | 1.19×103 | 5.70×102 | 5.06×102 | 6.75×102 | 5.50×102 |
| Std | 2.00×101 | 9.59×101 | 3.99×102 | 3.77×101 | 1.72×101 | 8.77×101 | 3.38×101 | |
| F4 | Avg | 6.35×102 | 6.93×102 | 7.52×102 | 5.92×102 | 6.61×102 | 7.97×102 | 7.48×102 |
| Std | 3.04×101 | 4.47×101 | 3.00×101 | 2.08×101 | 2.48×101 | 5.67×101 | 3.93×101 | |
| F5 | Avg | 6.01×102 | 6.27×102 | 6.41×102 | 6.06×102 | 6.07×102 | 6.74×102 | 6.63×102 |
| Std | 1.18×101 | 1.12×101 | 1.28×101 | 2.26×100 | 5.45×100 | 1.07×100 | 8.38×100 | |
| F6 | Avg | 8.90×102 | 9.11×102 | 1.01×103 | 8.59×102 | 9.29×102 | 1.25×103 | 1.26×103 |
| Std | 4.44×101 | 6.10×101 | 2.80×101 | 3.88×101 | 3.36×101 | 8.18×101 | 5.86×101 | |
| F7 | Avg | 8.15×102 | 9.89×102 | 1.04×103 | 8.82×102 | 9.39×102 | 1.01×103 | 9.59×102 |
| Std | 2.81×101 | 5.27×101 | 2.71×101 | 2.81×101 | 1.96×101 | 5.03×101 | 2.15×101 | |
| F8 | Avg | 2.12×103 | 6.25×103 | 3.90×103 | 1.49×103 | 2.89×103 | 9.03×103 | 7.10×103 |
| Std | 1.02×103 | 1.73×103 | 1.56×103 | 3.93×102 | 4.27×102 | 3.83×103 | 7.19×102 | |
| F9 | Avg | 5.03×103 | 5.13×103 | 8.69×103 | 4.29×103 | 5.14×103 | 6.51×103 | 5.78×103 |
| Std | 7.10×102 | 6.78×102 | 3.35×102 | 8.75×102 | 3.50×102 | 7.64×102 | 6.81×102 | |
| F10 | Avg | 1.18×103 | 1.53×103 | 4.06×103 | 1.48×103 | 1.22×103 | 4.61×103 | 1.26×103 |
| Std | 5.57×101 | 2.10×102 | 1.15×103 | 4.23×102 | 2.55×101 | 2.40×103 | 4.92×101 | |
| F11 | Avg | 5.31×105 | 4.61×107 | 4.73×108 | 3.88×107 | 7.65×105 | 1.70×108 | 2.13×107 |
| Std | 5.28×105 | 6.84×107 | 4.17×108 | 5.01×107 | 4.65×105 | 1.14×108 | 1.16×107 | |
| F12 | Avg | 9.27×103 | 4.95×106 | 2.13×107 | 9.32×106 | 1.47×104 | 4.15×105 | 5.84×105 |
| Std | 7.25×103 | 1.38×107 | 2.62×107 | 3.54×107 | 9.02×103 | 3.76×105 | 4.09×105 | |
| F13 | Avg | 4.61×103 | 1.20×105 | 5.63×105 | 2.84×105 | 8.58×103 | 2.18×106 | 4.46×105 |
| Std | 7.33×104 | 1.30×105 | 2.84×105 | 4.48×105 | 4.54×103 | 2.25×106 | 4.07×105 | |
| F14 | Avg | 3.46×103 | 6.57×104 | 1.34×106 | 3.50×105 | 5.19×103 | 2.12×105 | 7.49×104 |
| Std | 1.57×103 | 4.86×104 | 1.95×106 | 7.48×105 | 2.76×103 | 2.03×105 | 5.60×104 | |
| F15 | Avg | 2.65×103 | 2.97×103 | 4.07×103 | 2.50×103 | 2.56×103 | 4.04×103 | 3.34×103 |
| Std | 2.83×102 | 3.47×102 | 2.55×102 | 2.79×102 | 1.59×102 | 7.16×102 | 3.12×102 | |
| F16 | Avg | 1.58×103 | 2.40×103 | 2.97×103 | 2.02×103 | 1.98×103 | 2.65×103 | 2.67×103 |
| Std | 1.36×102 | 3.07×102 | 1.76×102 | 1.65×102 | 6.51×101 | 2.74×102 | 2.26×102 | |
| F17 | Avg | 1.25×105 | 1.00×106 | 2.88×106 | 1.47×106 | 1.11×105 | 6.18×106 | 1.46×106 |
| Std | 3.74×105 | 1.63×106 | 2.69×106 | 1.56×106 | 6.94×104 | 6.17×106 | 1.81×106 | |
| F18 | Avg | 5.06×103 | 1.01×106 | 2.75×106 | 6.32×105 | 5.43×103 | 1.01×107 | 7.19×105 |
| Std | 5.11×103 | 2.64×106 | 2.60×106 | 6.98×105 | 1.55×103 | 9.36×106 | 6.25×105 | |
| F19 | Avg | 2.66×103 | 2.62×103 | 3.02×103 | 2.42×103 | 2.38×103 | 2.79×103 | 2.71×103 |
| Std | 1.63×102 | 1.83×102 | 1.72×102 | 1.59×102 | 6.24×101 | 2.03×102 | 1.96×102 | |
| F20 | Avg | 2.26×103 | 2.49×103 | 2.56×103 | 2.39×103 | 2.42×103 | 2.59×103 | 2.56×103 |
| Std | 1.03×102 | 4.86×101 | 2.71×101 | 3.48×101 | 1.37×101 | 5.96×101 | 6.13×101 | |
| F21 | Avg | 2.30×103 | 5.73×103 | 3.46×103 | 4.84×103 | 2.30×103 | 7.05×103 | 5.29×103 |
| Std | 1.25×100 | 1.96×103 | 3.25×102 | 1.88×103 | 3.89×100 | 2.00×103 | 2.27×103 | |
| F22 | Avg | 2.81×103 | 2.87×103 | 3.03×103 | 2.75×103 | 2.76×103 | 3.08×103 | 3.12×103 |
| Std | 4.99×101 | 4.43×101 | 6.14×101 | 4.48×101 | 1.48×101 | 1.33×102 | 1.22×102 | |
| F23 | Avg | 3.00×103 | 3.06×103 | 3.12×103 | 2.94×103 | 2.91×103 | 3.22×103 | 3.36×103 |
| Std | 4.61×101 | 6.16×101 | 4.34×101 | 7.18×101 | 2.08×101 | 9.45×101 | 1.15×102 | |
| F24 | Avg | 2.89×103 | 2.95×103 | 3.26×103 | 2.96×103 | 2.92×103 | 3.05×103 | 2.95×103 |
| Std | 1.00×101 | 5.02×101 | 9.04×101 | 3.71×101 | 1.77×101 | 4.53×101 | 2.24×101 | |
| F25 | Avg | 3.15×103 | 5.92×103 | 7.70×103 | 4.57×103 | 3.28×103 | 8.13×103 | 7.43×103 |
| Std | 1.31×103 | 9.57×102 | 5.69×102 | 3.60×102 | 7.53×102 | 1.19×103 | 1.04×103 | |
| F26 | Avg | 3.21×103 | 3.28×103 | 3.38×103 | 3.25×103 | 3.22×103 | 3.43×103 | 3.43×103 |
| Std | 3.17×101 | 3.14×101 | 5.14×101 | 1.88×101 | 8.02×100 | 1.17×102 | 1.21×102 | |
| F27 | Avg | 3.21×103 | 3.38×103 | 4.00×103 | 3.36×103 | 3.28×103 | 3.46×103 | 3.32×103 |
| Std | 1.24×101 | 7.48×101 | 2.37×102 | 5.54×101 | 1.38×101 | 7.21×101 | 3.76×101 | |
| F28 | Avg | 3.92×103 | 4.05×103 | 5.80×103 | 3.74×103 | 3.91×103 | 5.14×103 | 4.59×103 |
| Std | 3.01×102 | 2.52×102 | 4.27×102 | 1.45×102 | 1.42×102 | 6.00×102 | 3.96×102 | |
| F29 | Avg | 8.78×104 | 1.55×106 | 2.42×107 | 8.58×106 | 1.99×104 | 3.07×107 | 3.03×106 |
| Std | 1.84×105 | 2.56×106 | 1.05×107 | 5.80×106 | 2.15×104 | 2.59×107 | 1.80×106 |
表3 CEC2017目标函数评估结果
Table 3 Evaluation results of CEC2017 objective functions
| 函数 | 指标 | GOTDBO | DBO | SABO | GWO | NGO | WOA | HHO |
|---|---|---|---|---|---|---|---|---|
| F1 | Avg | 3.84×103 | 5.47×107 | 7.30×109 | 1.73×109 | 2.29×105 | 4.82×108 | 2.29×107 |
| Std | 5.23×103 | 6.96×107 | 2.71×109 | 1.56×109 | 2.56×105 | 2.30×108 | 6.23×106 | |
| F2 | Avg | 2.35×104 | 9.80×104 | 5.66×104 | 4.30×104 | 5.37×104 | 2.52×105 | 2.87×104 |
| Std | 6.52×103 | 3.23×104 | 6.55×103 | 1.05×104 | 5.77×103 | 7.38×104 | 6.15×103 | |
| F3 | Avg | 4.95×102 | 5.85×102 | 1.19×103 | 5.70×102 | 5.06×102 | 6.75×102 | 5.50×102 |
| Std | 2.00×101 | 9.59×101 | 3.99×102 | 3.77×101 | 1.72×101 | 8.77×101 | 3.38×101 | |
| F4 | Avg | 6.35×102 | 6.93×102 | 7.52×102 | 5.92×102 | 6.61×102 | 7.97×102 | 7.48×102 |
| Std | 3.04×101 | 4.47×101 | 3.00×101 | 2.08×101 | 2.48×101 | 5.67×101 | 3.93×101 | |
| F5 | Avg | 6.01×102 | 6.27×102 | 6.41×102 | 6.06×102 | 6.07×102 | 6.74×102 | 6.63×102 |
| Std | 1.18×101 | 1.12×101 | 1.28×101 | 2.26×100 | 5.45×100 | 1.07×100 | 8.38×100 | |
| F6 | Avg | 8.90×102 | 9.11×102 | 1.01×103 | 8.59×102 | 9.29×102 | 1.25×103 | 1.26×103 |
| Std | 4.44×101 | 6.10×101 | 2.80×101 | 3.88×101 | 3.36×101 | 8.18×101 | 5.86×101 | |
| F7 | Avg | 8.15×102 | 9.89×102 | 1.04×103 | 8.82×102 | 9.39×102 | 1.01×103 | 9.59×102 |
| Std | 2.81×101 | 5.27×101 | 2.71×101 | 2.81×101 | 1.96×101 | 5.03×101 | 2.15×101 | |
| F8 | Avg | 2.12×103 | 6.25×103 | 3.90×103 | 1.49×103 | 2.89×103 | 9.03×103 | 7.10×103 |
| Std | 1.02×103 | 1.73×103 | 1.56×103 | 3.93×102 | 4.27×102 | 3.83×103 | 7.19×102 | |
| F9 | Avg | 5.03×103 | 5.13×103 | 8.69×103 | 4.29×103 | 5.14×103 | 6.51×103 | 5.78×103 |
| Std | 7.10×102 | 6.78×102 | 3.35×102 | 8.75×102 | 3.50×102 | 7.64×102 | 6.81×102 | |
| F10 | Avg | 1.18×103 | 1.53×103 | 4.06×103 | 1.48×103 | 1.22×103 | 4.61×103 | 1.26×103 |
| Std | 5.57×101 | 2.10×102 | 1.15×103 | 4.23×102 | 2.55×101 | 2.40×103 | 4.92×101 | |
| F11 | Avg | 5.31×105 | 4.61×107 | 4.73×108 | 3.88×107 | 7.65×105 | 1.70×108 | 2.13×107 |
| Std | 5.28×105 | 6.84×107 | 4.17×108 | 5.01×107 | 4.65×105 | 1.14×108 | 1.16×107 | |
| F12 | Avg | 9.27×103 | 4.95×106 | 2.13×107 | 9.32×106 | 1.47×104 | 4.15×105 | 5.84×105 |
| Std | 7.25×103 | 1.38×107 | 2.62×107 | 3.54×107 | 9.02×103 | 3.76×105 | 4.09×105 | |
| F13 | Avg | 4.61×103 | 1.20×105 | 5.63×105 | 2.84×105 | 8.58×103 | 2.18×106 | 4.46×105 |
| Std | 7.33×104 | 1.30×105 | 2.84×105 | 4.48×105 | 4.54×103 | 2.25×106 | 4.07×105 | |
| F14 | Avg | 3.46×103 | 6.57×104 | 1.34×106 | 3.50×105 | 5.19×103 | 2.12×105 | 7.49×104 |
| Std | 1.57×103 | 4.86×104 | 1.95×106 | 7.48×105 | 2.76×103 | 2.03×105 | 5.60×104 | |
| F15 | Avg | 2.65×103 | 2.97×103 | 4.07×103 | 2.50×103 | 2.56×103 | 4.04×103 | 3.34×103 |
| Std | 2.83×102 | 3.47×102 | 2.55×102 | 2.79×102 | 1.59×102 | 7.16×102 | 3.12×102 | |
| F16 | Avg | 1.58×103 | 2.40×103 | 2.97×103 | 2.02×103 | 1.98×103 | 2.65×103 | 2.67×103 |
| Std | 1.36×102 | 3.07×102 | 1.76×102 | 1.65×102 | 6.51×101 | 2.74×102 | 2.26×102 | |
| F17 | Avg | 1.25×105 | 1.00×106 | 2.88×106 | 1.47×106 | 1.11×105 | 6.18×106 | 1.46×106 |
| Std | 3.74×105 | 1.63×106 | 2.69×106 | 1.56×106 | 6.94×104 | 6.17×106 | 1.81×106 | |
| F18 | Avg | 5.06×103 | 1.01×106 | 2.75×106 | 6.32×105 | 5.43×103 | 1.01×107 | 7.19×105 |
| Std | 5.11×103 | 2.64×106 | 2.60×106 | 6.98×105 | 1.55×103 | 9.36×106 | 6.25×105 | |
| F19 | Avg | 2.66×103 | 2.62×103 | 3.02×103 | 2.42×103 | 2.38×103 | 2.79×103 | 2.71×103 |
| Std | 1.63×102 | 1.83×102 | 1.72×102 | 1.59×102 | 6.24×101 | 2.03×102 | 1.96×102 | |
| F20 | Avg | 2.26×103 | 2.49×103 | 2.56×103 | 2.39×103 | 2.42×103 | 2.59×103 | 2.56×103 |
| Std | 1.03×102 | 4.86×101 | 2.71×101 | 3.48×101 | 1.37×101 | 5.96×101 | 6.13×101 | |
| F21 | Avg | 2.30×103 | 5.73×103 | 3.46×103 | 4.84×103 | 2.30×103 | 7.05×103 | 5.29×103 |
| Std | 1.25×100 | 1.96×103 | 3.25×102 | 1.88×103 | 3.89×100 | 2.00×103 | 2.27×103 | |
| F22 | Avg | 2.81×103 | 2.87×103 | 3.03×103 | 2.75×103 | 2.76×103 | 3.08×103 | 3.12×103 |
| Std | 4.99×101 | 4.43×101 | 6.14×101 | 4.48×101 | 1.48×101 | 1.33×102 | 1.22×102 | |
| F23 | Avg | 3.00×103 | 3.06×103 | 3.12×103 | 2.94×103 | 2.91×103 | 3.22×103 | 3.36×103 |
| Std | 4.61×101 | 6.16×101 | 4.34×101 | 7.18×101 | 2.08×101 | 9.45×101 | 1.15×102 | |
| F24 | Avg | 2.89×103 | 2.95×103 | 3.26×103 | 2.96×103 | 2.92×103 | 3.05×103 | 2.95×103 |
| Std | 1.00×101 | 5.02×101 | 9.04×101 | 3.71×101 | 1.77×101 | 4.53×101 | 2.24×101 | |
| F25 | Avg | 3.15×103 | 5.92×103 | 7.70×103 | 4.57×103 | 3.28×103 | 8.13×103 | 7.43×103 |
| Std | 1.31×103 | 9.57×102 | 5.69×102 | 3.60×102 | 7.53×102 | 1.19×103 | 1.04×103 | |
| F26 | Avg | 3.21×103 | 3.28×103 | 3.38×103 | 3.25×103 | 3.22×103 | 3.43×103 | 3.43×103 |
| Std | 3.17×101 | 3.14×101 | 5.14×101 | 1.88×101 | 8.02×100 | 1.17×102 | 1.21×102 | |
| F27 | Avg | 3.21×103 | 3.38×103 | 4.00×103 | 3.36×103 | 3.28×103 | 3.46×103 | 3.32×103 |
| Std | 1.24×101 | 7.48×101 | 2.37×102 | 5.54×101 | 1.38×101 | 7.21×101 | 3.76×101 | |
| F28 | Avg | 3.92×103 | 4.05×103 | 5.80×103 | 3.74×103 | 3.91×103 | 5.14×103 | 4.59×103 |
| Std | 3.01×102 | 2.52×102 | 4.27×102 | 1.45×102 | 1.42×102 | 6.00×102 | 3.96×102 | |
| F29 | Avg | 8.78×104 | 1.55×106 | 2.42×107 | 8.58×106 | 1.99×104 | 3.07×107 | 3.03×106 |
| Std | 1.84×105 | 2.56×106 | 1.05×107 | 5.80×106 | 2.15×104 | 2.59×107 | 1.80×106 |
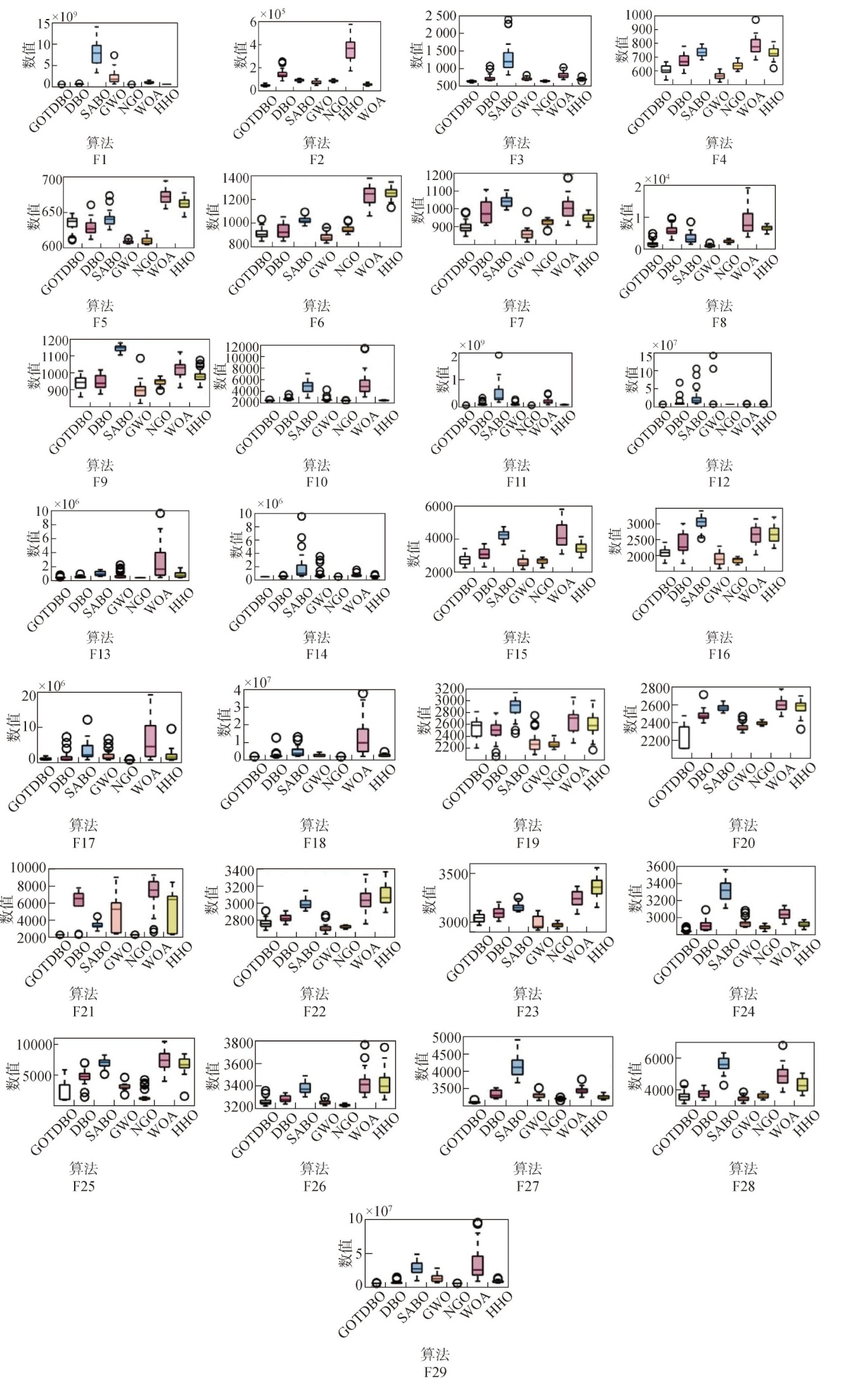
图6 优化算法在CEC2017测试函数上的性能箱线图
Fig.6 Boxplot of performance of optimization algorithms on CEC2017 test functions
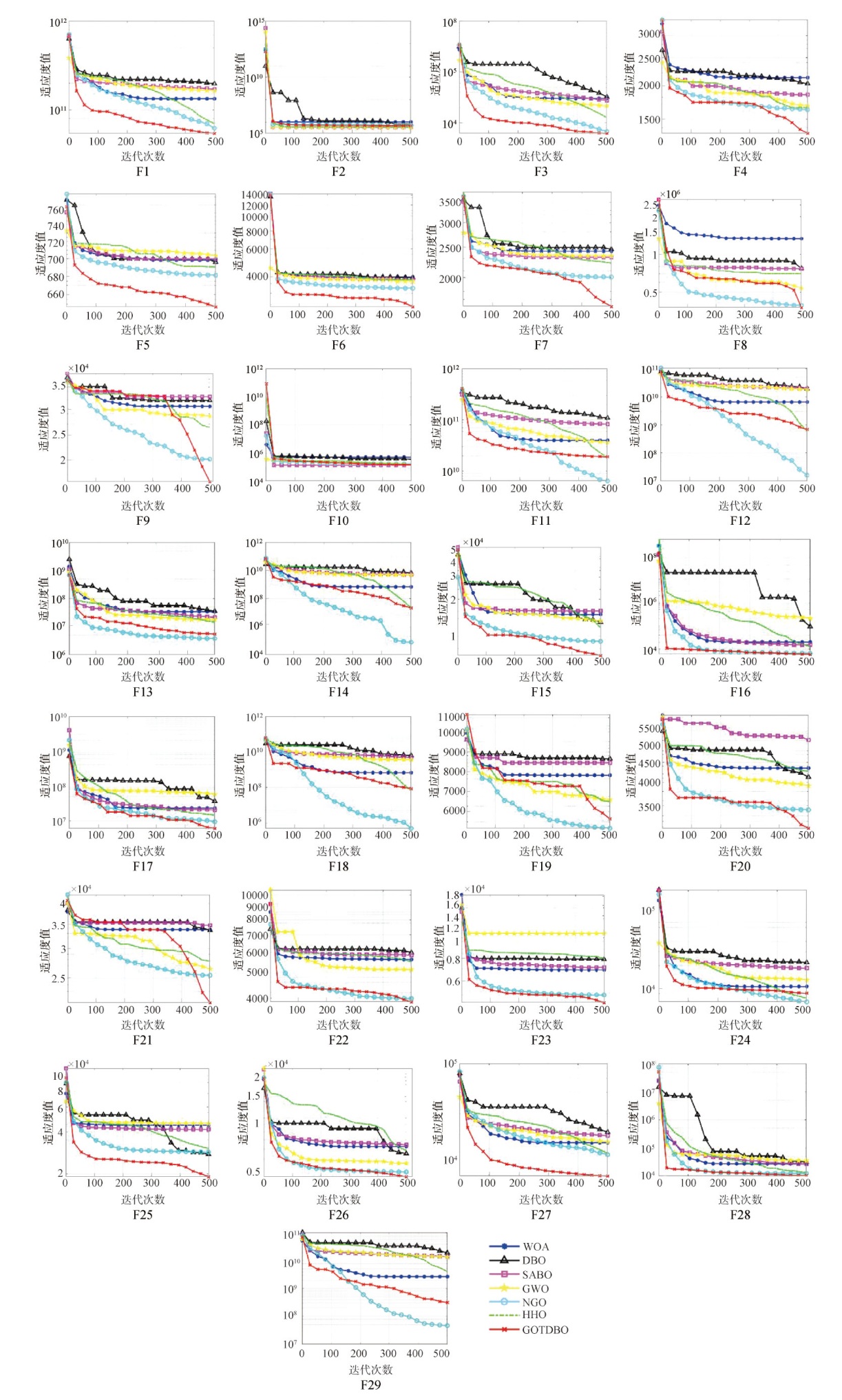
图7 不同函数下算法收敛图
Fig.7 Algorithm convergence diagrams under different functions
| 函数 | GOTDBO vs.DBO | GOTDBO vs.SABO | GOTDBO vs.GWO | GOTDBO vs.NGO | GOTDBO vs.WOA | GOTDBO vs.HHO |
|---|---|---|---|---|---|---|
| F1 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 |
| F2 | 3.02×10-11 | 3.02×10-11 | 2.23×10-9 | 3.02×10-11 | 3.02×10-11 | 2.50×10-2 |
| F3 | 1.41×10-9 | 3.02×10-11 | 6.70×10-7 | 5.19×10-2 | 3.02×10-11 | 7.12×10-9 |
| F4 | 1.61×10-6 | 3.02×10-11 | 5.19×10-7 | 1.24×10-3 | 3.02×10-11 | 1.09×10-10 |
| F5 | 1.84×10-2 | 7.73×10-2 | 6.7×10-11 | 1.41×10-9 | 3.02×10-11 | 8.15×10-11 |
| F6 | 2.01×10-1 | 3.16×10-10 | 3.18×10-3 | 1.11×10-4 | 3.02×10-11 | 3.02×10-11 |
| F7 | 4.31×10-8 | 3.02×10-11 | 2.49×10-6 | 8.66×10-5 | 6.72×10-10 | 1.60×10-7 |
| F8 | 1.33×10-10 | 3.81×10-7 | 6.38×10-3 | 2.43×10-5 | 5.49×10-11 | 3.34×10-11 |
| F9 | 6.31×10-1 | 3.02×10-11 | 1.49×10-4 | 4.20×10-1 | 1.85×10-8 | 3.01×10-4 |
| F10 | 4.98×10-11 | 3.02×10-11 | 2.60×10-3 | 5.20×10-1 | 3.02×10-11 | 3.92×10-2 |
| F11 | 2.61×10-10 | 3.02×10-11 | 4.08×10-11 | 7.62×10-3 | 3.02×10-11 | 3.02×10-11 |
| F12 | 9.92×10-11 | 3.02×10-11 | 3.02×10-11 | 1.12×10-2 | 3.02×10-11 | 3.02×10-11 |
| F13 | 7.62×10-2 | 9.92×10-11 | 1.17×10-3 | 7.6×10-7 | 2.61×10-10 | 7.09×10-8 |
| F14 | 8.99×10-11 | 3.02×10-11 | 3.02×10-11 | 5.57×10-3 | 3.02×10-11 | 3.02×10-11 |
| F15 | 3.56×10-4 | 3.02×10-11 | 4.21×10-3 | 1.91×10-1 | 8.15×10-11 | 2.23×10-9 |
| F16 | 2.16×10-3 | 3.02×10-11 | 4.98×10-4 | 3.65×10-8 | 1.31×10-8 | 2.15×10-10 |
| F17 | 7.96×10-1 | 3.52×10-7 | 1.95×10-2 | 2.57×10-7 | 4.11×10-7 | 5.32×10-3 |
| F18 | 5.19×10-7 | 3.02×10-11 | 3.02×10-11 | 9.12×10-1 | 3.02×10-11 | 3.02×10-11 |
| F19 | 2.28×10-1 | 1.70×10-8 | 3.57×10-6 | 3.35×10-8 | 4.86×10-3 | 4.83×10-1 |
| F20 | 3.82×10-10 | 3.02×10-11 | 2.39×10-4 | 1.03×10-6 | 3.34×10-11 | 8.15×10-11 |
| F21 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 | 9.53×10-7 | 3.02×10-11 | 3.02×10-11 |
| F22 | 1.25×10-5 | 3.34×10-11 | 1.34×10-5 | 1.78×10-4 | 5.57×10-10 | 3.69×10-11 |
| F23 | 1.68×10-4 | 5.49×10-11 | 4.22×10-4 | 7.38×10-10 | 8.99×10-11 | 3.02×10-11 |
| F24 | 7.38×10-10 | 3.02×10-11 | 3.34×10-11 | 2.23×10-9 | 3.02×10-11 | 5.49×10-11 |
| F25 | 1.16×10-7 | 4.50×10-11 | 1.17×10-3 | 1.91×10-1 | 7.39×10-11 | 1.46×10-10 |
| F26 | 1.11×10-3 | 1.78×10-10 | 8.30×10-1 | 3.35×10-8 | 1.46×10-10 | 1.78×10-10 |
| F27 | 3.02×10-11 | 3.02×10-11 | 3.34×10-11 | 3.69×10-11 | 3.02×10-11 | 3.02×10-11 |
| F28 | 3.78×10-2 | 3.34×10-11 | 1.50×10-2 | 5.99×10-1 | 1.46×10-10 | 2.39×10-8 |
| F29 | 6.53×10-8 | 3.02×10-11 | 3.02×10-11 | 4.12×10-1 | 3.02×10-11 | 3.34×10-11 |
表4 7种算法的Wilcoxon秩和检验的统计结果
Table 4 The statistical results of Wilcoxon rank-sum test for seven algorithms
| 函数 | GOTDBO vs.DBO | GOTDBO vs.SABO | GOTDBO vs.GWO | GOTDBO vs.NGO | GOTDBO vs.WOA | GOTDBO vs.HHO |
|---|---|---|---|---|---|---|
| F1 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 |
| F2 | 3.02×10-11 | 3.02×10-11 | 2.23×10-9 | 3.02×10-11 | 3.02×10-11 | 2.50×10-2 |
| F3 | 1.41×10-9 | 3.02×10-11 | 6.70×10-7 | 5.19×10-2 | 3.02×10-11 | 7.12×10-9 |
| F4 | 1.61×10-6 | 3.02×10-11 | 5.19×10-7 | 1.24×10-3 | 3.02×10-11 | 1.09×10-10 |
| F5 | 1.84×10-2 | 7.73×10-2 | 6.7×10-11 | 1.41×10-9 | 3.02×10-11 | 8.15×10-11 |
| F6 | 2.01×10-1 | 3.16×10-10 | 3.18×10-3 | 1.11×10-4 | 3.02×10-11 | 3.02×10-11 |
| F7 | 4.31×10-8 | 3.02×10-11 | 2.49×10-6 | 8.66×10-5 | 6.72×10-10 | 1.60×10-7 |
| F8 | 1.33×10-10 | 3.81×10-7 | 6.38×10-3 | 2.43×10-5 | 5.49×10-11 | 3.34×10-11 |
| F9 | 6.31×10-1 | 3.02×10-11 | 1.49×10-4 | 4.20×10-1 | 1.85×10-8 | 3.01×10-4 |
| F10 | 4.98×10-11 | 3.02×10-11 | 2.60×10-3 | 5.20×10-1 | 3.02×10-11 | 3.92×10-2 |
| F11 | 2.61×10-10 | 3.02×10-11 | 4.08×10-11 | 7.62×10-3 | 3.02×10-11 | 3.02×10-11 |
| F12 | 9.92×10-11 | 3.02×10-11 | 3.02×10-11 | 1.12×10-2 | 3.02×10-11 | 3.02×10-11 |
| F13 | 7.62×10-2 | 9.92×10-11 | 1.17×10-3 | 7.6×10-7 | 2.61×10-10 | 7.09×10-8 |
| F14 | 8.99×10-11 | 3.02×10-11 | 3.02×10-11 | 5.57×10-3 | 3.02×10-11 | 3.02×10-11 |
| F15 | 3.56×10-4 | 3.02×10-11 | 4.21×10-3 | 1.91×10-1 | 8.15×10-11 | 2.23×10-9 |
| F16 | 2.16×10-3 | 3.02×10-11 | 4.98×10-4 | 3.65×10-8 | 1.31×10-8 | 2.15×10-10 |
| F17 | 7.96×10-1 | 3.52×10-7 | 1.95×10-2 | 2.57×10-7 | 4.11×10-7 | 5.32×10-3 |
| F18 | 5.19×10-7 | 3.02×10-11 | 3.02×10-11 | 9.12×10-1 | 3.02×10-11 | 3.02×10-11 |
| F19 | 2.28×10-1 | 1.70×10-8 | 3.57×10-6 | 3.35×10-8 | 4.86×10-3 | 4.83×10-1 |
| F20 | 3.82×10-10 | 3.02×10-11 | 2.39×10-4 | 1.03×10-6 | 3.34×10-11 | 8.15×10-11 |
| F21 | 3.02×10-11 | 3.02×10-11 | 3.02×10-11 | 9.53×10-7 | 3.02×10-11 | 3.02×10-11 |
| F22 | 1.25×10-5 | 3.34×10-11 | 1.34×10-5 | 1.78×10-4 | 5.57×10-10 | 3.69×10-11 |
| F23 | 1.68×10-4 | 5.49×10-11 | 4.22×10-4 | 7.38×10-10 | 8.99×10-11 | 3.02×10-11 |
| F24 | 7.38×10-10 | 3.02×10-11 | 3.34×10-11 | 2.23×10-9 | 3.02×10-11 | 5.49×10-11 |
| F25 | 1.16×10-7 | 4.50×10-11 | 1.17×10-3 | 1.91×10-1 | 7.39×10-11 | 1.46×10-10 |
| F26 | 1.11×10-3 | 1.78×10-10 | 8.30×10-1 | 3.35×10-8 | 1.46×10-10 | 1.78×10-10 |
| F27 | 3.02×10-11 | 3.02×10-11 | 3.34×10-11 | 3.69×10-11 | 3.02×10-11 | 3.02×10-11 |
| F28 | 3.78×10-2 | 3.34×10-11 | 1.50×10-2 | 5.99×10-1 | 1.46×10-10 | 2.39×10-8 |
| F29 | 6.53×10-8 | 3.02×10-11 | 3.02×10-11 | 4.12×10-1 | 3.02×10-11 | 3.34×10-11 |
| 函数 | 种群数量 | |||
|---|---|---|---|---|
| 20 | 40 | 60 | 80 | |
| F1 | 14357250870.1265 | 116.0104 | 100.7044 | 100.0188 |
| F2 | 65731.2988 | 27611.8116 | 18926.7152 | 15363.2131 |
| F3 | 732.0261 | 472.9462 | 469.2622 | 465.2131 |
| F4 | 721.0206 | 576.6115 | 595.0123 | 585.5663 |
| F5 | 639.5180 | 621.2830 | 610.6377 | 605.4304 |
| F6 | 1145.3922 | 823.5415 | 831.0976 | 813.5674 |
| F7 | 985.6784 | 881.5864 | 886.5611 | 868.6520 |
| F8 | 4461.1263 | 1413.6466 | 1646.2919 | 1277.0191 |
| F9 | 5115.3986 | 4549.5359 | 3998.7796 | 3827.529 |
| F10 | 4377.1858 | 1154.1395 | 1146.3560 | 1143.6654 |
| F11 | 343079033.7023 | 109358.0727 | 84566.1251 | 77408.8254 |
| F12 | 11295693.4089 | 4303.1477 | 2686.8763 | 1537.8348 |
| F13 | 129699.1408 | 3486.9245 | 5768.3868 | 2357.362 |
| F14 | 73552.9374 | 1740.6270 | 1811.4656 | 1648.6888 |
| F15 | 3235.2565 | 2243.9587 | 2000.4655 | 1948.6322 |
| F16 | 2225.8664 | 1829.6791 | 1782.0605 | 1764.9297 |
| F17 | 462204.8433 | 149600.1802 | 103637.4103 | 73093.2517 |
| F18 | 376026.8268 | 2131.4679 | 2134.4968 | 2067.0915 |
| F19 | 2373.2010 | 2269.4362 | 2384.7475 | 2289.5849 |
| F20 | 2287.9287 | 2202.7809 | 2201.8412 | 2201.5803 |
| F21 | 3704.8980 | 2300.0105 | 2300.0001 | 2300.0000 |
| F22 | 2873.5480 | 2749.4721 | 2746.2056 | 2730.8182 |
| F23 | 3105.9160 | 2915.9362 | 2923.5757 | 2883.5074 |
| F24 | 3177.4275 | 2883.5940 | 2883.5074 | 2883.5033 |
| F25 | 5792.8516 | 2800.2459 | 2800.0014 | 2800.0001 |
| F26 | 3281.3135 | 3225.1038 | 3227.5987 | 3220.5637 |
| F27 | 3667.0093 | 3201.8490 | 3207.4085 | 3197.1586 |
| F28 | 4245.8979 | 3547.3142 | 3556.7941 | 3474.9072 |
| F29 | 21691161.8028 | 6876.3282 | 5592.0057 | 5405.1612 |
表5 GOTDBO算法种群数量N的敏感性分析
Table 5 Sensitivity analysis of GOTDBO algorithm for the number of population members N
| 函数 | 种群数量 | |||
|---|---|---|---|---|
| 20 | 40 | 60 | 80 | |
| F1 | 14357250870.1265 | 116.0104 | 100.7044 | 100.0188 |
| F2 | 65731.2988 | 27611.8116 | 18926.7152 | 15363.2131 |
| F3 | 732.0261 | 472.9462 | 469.2622 | 465.2131 |
| F4 | 721.0206 | 576.6115 | 595.0123 | 585.5663 |
| F5 | 639.5180 | 621.2830 | 610.6377 | 605.4304 |
| F6 | 1145.3922 | 823.5415 | 831.0976 | 813.5674 |
| F7 | 985.6784 | 881.5864 | 886.5611 | 868.6520 |
| F8 | 4461.1263 | 1413.6466 | 1646.2919 | 1277.0191 |
| F9 | 5115.3986 | 4549.5359 | 3998.7796 | 3827.529 |
| F10 | 4377.1858 | 1154.1395 | 1146.3560 | 1143.6654 |
| F11 | 343079033.7023 | 109358.0727 | 84566.1251 | 77408.8254 |
| F12 | 11295693.4089 | 4303.1477 | 2686.8763 | 1537.8348 |
| F13 | 129699.1408 | 3486.9245 | 5768.3868 | 2357.362 |
| F14 | 73552.9374 | 1740.6270 | 1811.4656 | 1648.6888 |
| F15 | 3235.2565 | 2243.9587 | 2000.4655 | 1948.6322 |
| F16 | 2225.8664 | 1829.6791 | 1782.0605 | 1764.9297 |
| F17 | 462204.8433 | 149600.1802 | 103637.4103 | 73093.2517 |
| F18 | 376026.8268 | 2131.4679 | 2134.4968 | 2067.0915 |
| F19 | 2373.2010 | 2269.4362 | 2384.7475 | 2289.5849 |
| F20 | 2287.9287 | 2202.7809 | 2201.8412 | 2201.5803 |
| F21 | 3704.8980 | 2300.0105 | 2300.0001 | 2300.0000 |
| F22 | 2873.5480 | 2749.4721 | 2746.2056 | 2730.8182 |
| F23 | 3105.9160 | 2915.9362 | 2923.5757 | 2883.5074 |
| F24 | 3177.4275 | 2883.5940 | 2883.5074 | 2883.5033 |
| F25 | 5792.8516 | 2800.2459 | 2800.0014 | 2800.0001 |
| F26 | 3281.3135 | 3225.1038 | 3227.5987 | 3220.5637 |
| F27 | 3667.0093 | 3201.8490 | 3207.4085 | 3197.1586 |
| F28 | 4245.8979 | 3547.3142 | 3556.7941 | 3474.9072 |
| F29 | 21691161.8028 | 6876.3282 | 5592.0057 | 5405.1612 |
| 函数 | 最大迭代次数 | |||
|---|---|---|---|---|
| 100 | 200 | 300 | 400 | |
| F1 | 6831638.3447 | 3251.8275 | 206.9639 | 101.3222 |
| F2 | 43569.3900 | 25383.1472 | 25025.6982 | 15639.6810 |
| F3 | 505.1954 | 473.8925 | 448.5478 | 407.3512 |
| F4 | 568.1175 | 565.9402 | 561.6883 | 556.7126 |
| F5 | 614.7980 | 613.0693 | 612.137 | 601.6673 |
| F6 | 831.8287 | 804.4745 | 794.7180 | 791.2057 |
| F7 | 874.4845 | 869.6553 | 864.6723 | 845.8460 |
| F8 | 1696.7997 | 1133.7189 | 1112.0113 | 1109.1512 |
| F9 | 3898.4745 | 3860.5282 | 3624.9605 | 3474.8728 |
| F10 | 1299.1835 | 1202.6093 | 1155.6158 | 1149.7177 |
| F11 | 169631.1818 | 147179.3458 | 113914.4288 | 73389.2358 |
| F12 | 5732.9769 | 4221.5604 | 2047.2659 | 1463.7406 |
| F13 | 10923.7531 | 9513.3577 | 3642.7905 | 3492.4111 |
| F14 | 2001.3367 | 1832.1725 | 1682.1324 | 1652.7808 |
| F15 | 2285.6363 | 2177.5805 | 2173.7263 | 1753.5940 |
| F16 | 1795.1903 | 1782.5427 | 1725.0936 | 1672.1121 |
| F17 | 203649.0877 | 103841.9727 | 94030.1582 | 80713.4592 |
| F18 | 3390.8159 | 2076.1651 | 2002.1769 | 1926.4038 |
| F19 | 2392.0476 | 2342.2296 | 2314.9721 | 2307.1965 |
| F20 | 2213.5223 | 2206.0126 | 2203.5757 | 2201.5648 |
| F21 | 2316.8770 | 2300.3332 | 2300.0094 | 2300.0002 |
| F22 | 2751.7004 | 2726.9892 | 2709.9929 | 2698.9780 |
| F23 | 2938.0872 | 2914.6407 | 2892.3779 | 2854.6137 |
| F24 | 2887.7467 | 2885.5081 | 2883.4799 | 2875.5611 |
| F25 | 2908.9355 | 2802.5851 | 2800.0917 | 2786.1178 |
| F26 | 3228.4299 | 3219.1615 | 3218.7353 | 3206.8530 |
| F27 | 3247.9189 | 3204.2670 | 3203.3867 | 3182.4388 |
| F28 | 11001.0994 | 3417.5418 | 3351.6151 | 3336.3271 |
| F29 | 11001.0994 | 6552.7274 | 5629.1220 | 5453.7255 |
表6 GOTDBO算法迭代次数T的敏感性分析
Table 6 Sensitivity analysis of GOTDBO algorithm for the number of iterations T
| 函数 | 最大迭代次数 | |||
|---|---|---|---|---|
| 100 | 200 | 300 | 400 | |
| F1 | 6831638.3447 | 3251.8275 | 206.9639 | 101.3222 |
| F2 | 43569.3900 | 25383.1472 | 25025.6982 | 15639.6810 |
| F3 | 505.1954 | 473.8925 | 448.5478 | 407.3512 |
| F4 | 568.1175 | 565.9402 | 561.6883 | 556.7126 |
| F5 | 614.7980 | 613.0693 | 612.137 | 601.6673 |
| F6 | 831.8287 | 804.4745 | 794.7180 | 791.2057 |
| F7 | 874.4845 | 869.6553 | 864.6723 | 845.8460 |
| F8 | 1696.7997 | 1133.7189 | 1112.0113 | 1109.1512 |
| F9 | 3898.4745 | 3860.5282 | 3624.9605 | 3474.8728 |
| F10 | 1299.1835 | 1202.6093 | 1155.6158 | 1149.7177 |
| F11 | 169631.1818 | 147179.3458 | 113914.4288 | 73389.2358 |
| F12 | 5732.9769 | 4221.5604 | 2047.2659 | 1463.7406 |
| F13 | 10923.7531 | 9513.3577 | 3642.7905 | 3492.4111 |
| F14 | 2001.3367 | 1832.1725 | 1682.1324 | 1652.7808 |
| F15 | 2285.6363 | 2177.5805 | 2173.7263 | 1753.5940 |
| F16 | 1795.1903 | 1782.5427 | 1725.0936 | 1672.1121 |
| F17 | 203649.0877 | 103841.9727 | 94030.1582 | 80713.4592 |
| F18 | 3390.8159 | 2076.1651 | 2002.1769 | 1926.4038 |
| F19 | 2392.0476 | 2342.2296 | 2314.9721 | 2307.1965 |
| F20 | 2213.5223 | 2206.0126 | 2203.5757 | 2201.5648 |
| F21 | 2316.8770 | 2300.3332 | 2300.0094 | 2300.0002 |
| F22 | 2751.7004 | 2726.9892 | 2709.9929 | 2698.9780 |
| F23 | 2938.0872 | 2914.6407 | 2892.3779 | 2854.6137 |
| F24 | 2887.7467 | 2885.5081 | 2883.4799 | 2875.5611 |
| F25 | 2908.9355 | 2802.5851 | 2800.0917 | 2786.1178 |
| F26 | 3228.4299 | 3219.1615 | 3218.7353 | 3206.8530 |
| F27 | 3247.9189 | 3204.2670 | 3203.3867 | 3182.4388 |
| F28 | 11001.0994 | 3417.5418 | 3351.6151 | 3336.3271 |
| F29 | 11001.0994 | 6552.7274 | 5629.1220 | 5453.7255 |
| 禁飞区域 | 中心坐标/km | 半径/km |
|---|---|---|
| NF1 | (300,400,200) | 50 |
| NF2 | (700,150,200) | 40 |
| NF3 | (450,350,200) | 60 |
| NF4 | (500,600,200) | 50 |
| NF5 | (800,500,200) | 40 |
| NF6 | (650,750,150) | 40 |
| NF7 | (550,550,250) | 60 |
| NF8 | (250,600,250) | 50 |
| NF9 | (150,150,200) | 40 |
| NF10 | (750,300,200) | 30 |
| NF11 | (650,250,150) | 50 |
| NF12 | (700,600,200) | 60 |
| NF13 | (500,250,200) | 50 |
表7 轨迹规划任务信息
Table 7 Trajectory planning mission information
| 禁飞区域 | 中心坐标/km | 半径/km |
|---|---|---|
| NF1 | (300,400,200) | 50 |
| NF2 | (700,150,200) | 40 |
| NF3 | (450,350,200) | 60 |
| NF4 | (500,600,200) | 50 |
| NF5 | (800,500,200) | 40 |
| NF6 | (650,750,150) | 40 |
| NF7 | (550,550,250) | 60 |
| NF8 | (250,600,250) | 50 |
| NF9 | (150,150,200) | 40 |
| NF10 | (750,300,200) | 30 |
| NF11 | (650,250,150) | 50 |
| NF12 | (700,600,200) | 60 |
| NF13 | (500,250,200) | 50 |
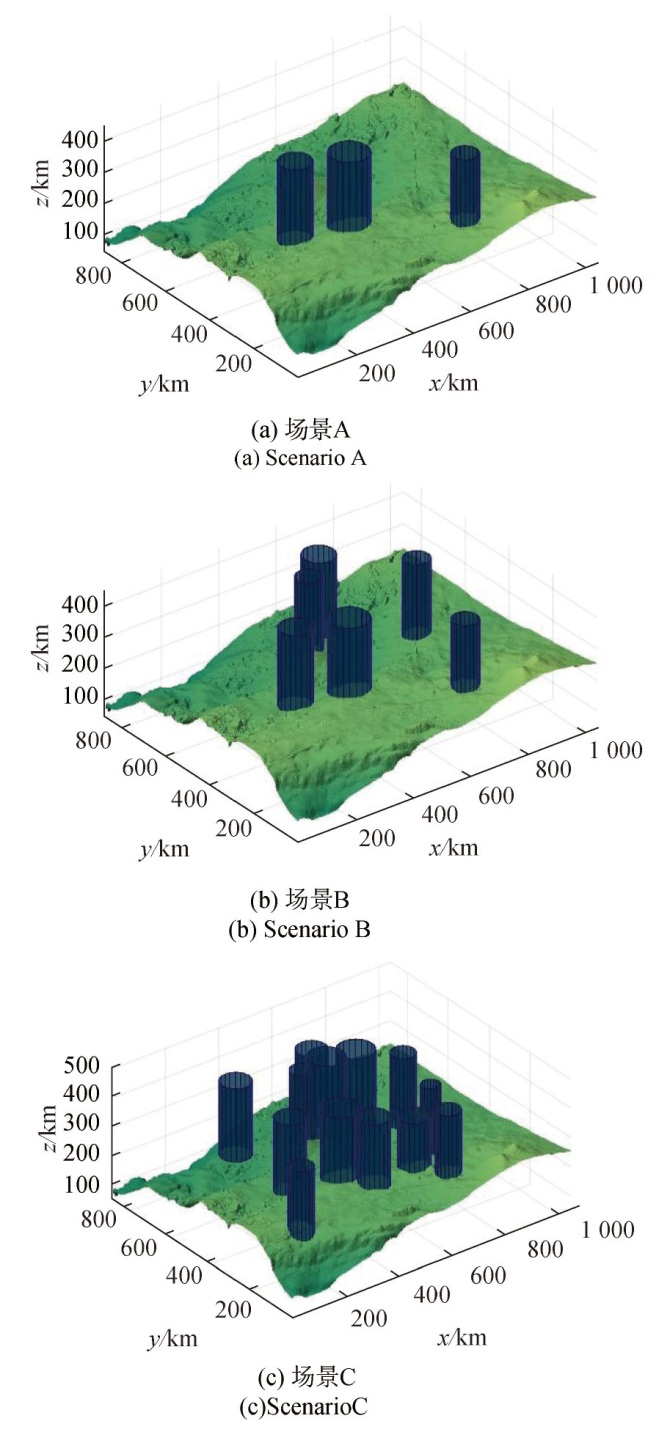
图8 3种规划场景下禁飞区域分布示意图
Fig.8 Schematic diagram of the distribution of no-fly zones under three planning scenarios
| 初始设置及 实验编号 | ω1 | ω2 | ω3 | ω4 | ω5 |
|---|---|---|---|---|---|
| 初始设置 | 10 | 100 | 10 | 50 | 1000 |
| 1 | 5 | 100 | 10 | 50 | 1000 |
| 2 | 20 | 100 | 10 | 50 | 1000 |
| 3 | 10 | 50 | 10 | 50 | 1000 |
| 4 | 10 | 200 | 10 | 50 | 1000 |
| 5 | 10 | 100 | 5 | 50 | 1000 |
| 6 | 10 | 100 | 20 | 50 | 1000 |
| 7 | 10 | 100 | 10 | 20 | 1000 |
| 8 | 10 | 100 | 10 | 80 | 1000 |
| 9 | 10 | 100 | 10 | 50 | 500 |
| 10 | 10 | 100 | 10 | 50 | 2000 |
表8 实验参数设定
Table 8 Experimental parameter setting
| 初始设置及 实验编号 | ω1 | ω2 | ω3 | ω4 | ω5 |
|---|---|---|---|---|---|
| 初始设置 | 10 | 100 | 10 | 50 | 1000 |
| 1 | 5 | 100 | 10 | 50 | 1000 |
| 2 | 20 | 100 | 10 | 50 | 1000 |
| 3 | 10 | 50 | 10 | 50 | 1000 |
| 4 | 10 | 200 | 10 | 50 | 1000 |
| 5 | 10 | 100 | 5 | 50 | 1000 |
| 6 | 10 | 100 | 20 | 50 | 1000 |
| 7 | 10 | 100 | 10 | 20 | 1000 |
| 8 | 10 | 100 | 10 | 80 | 1000 |
| 9 | 10 | 100 | 10 | 50 | 500 |
| 10 | 10 | 100 | 10 | 50 | 2000 |
| 初始设置及 实验编号 | 最大航程/ km | 威胁区域接 近次数/次 | 高度偏离 程度/km | 路径平 滑度 |
|---|---|---|---|---|
| 初始设置 | 1225.16 | 2 | 408.36 | 1 |
| 1 | 1250.35 | 3 | 408.86 | 1 |
| 2 | 1230.82 | 2 | 407.96 | 1 |
| 3 | 1230.74 | 3 | 406.56 | 1 |
| 4 | 1226.53 | 1 | 408.26 | 1 |
| 5 | 1227.44 | 2 | 420.56 | 1 |
| 6 | 1234.26 | 2 | 415.96 | 1 |
| 7 | 1228.93 | 2 | 406.46 | 0 |
| 8 | 1424.68 | 2 | 409.36 | 1 |
| 9 | 1678.45 | 3 | 404.66 | 1 |
| 10 | 1233.59 | 1 | 411.16 | 1 |
表9 不同权重组合的航迹规划性能结果
Table 9 Performance results of trajectory planning with different weight combinations
| 初始设置及 实验编号 | 最大航程/ km | 威胁区域接 近次数/次 | 高度偏离 程度/km | 路径平 滑度 |
|---|---|---|---|---|
| 初始设置 | 1225.16 | 2 | 408.36 | 1 |
| 1 | 1250.35 | 3 | 408.86 | 1 |
| 2 | 1230.82 | 2 | 407.96 | 1 |
| 3 | 1230.74 | 3 | 406.56 | 1 |
| 4 | 1226.53 | 1 | 408.26 | 1 |
| 5 | 1227.44 | 2 | 420.56 | 1 |
| 6 | 1234.26 | 2 | 415.96 | 1 |
| 7 | 1228.93 | 2 | 406.46 | 0 |
| 8 | 1424.68 | 2 | 409.36 | 1 |
| 9 | 1678.45 | 3 | 404.66 | 1 |
| 10 | 1233.59 | 1 | 411.16 | 1 |
| 算法 | 参数设定 |
|---|---|
| ACO[ | 信息素启发因子α∈[1,2],启发函数因子β∈[2,5],信息素挥发系数ρ∈(0.1,0.5) |
| ABC[ | 雇佣蜂和观察蜂数量同为30,引领蜂数量为30,蜜源放弃阈值limit∈[20,100] |
表10 算法参数设定
Table 10 Algorithm parameter settings
| 算法 | 参数设定 |
|---|---|
| ACO[ | 信息素启发因子α∈[1,2],启发函数因子β∈[2,5],信息素挥发系数ρ∈(0.1,0.5) |
| ABC[ | 雇佣蜂和观察蜂数量同为30,引领蜂数量为30,蜜源放弃阈值limit∈[20,100] |

图9 航迹规划示意图(左为正视图,中间为俯视图,右为侧视图)
Fig.9 Schematic diagram of trajectory planning(the left:front view,the middle:top view,and the right:side view)
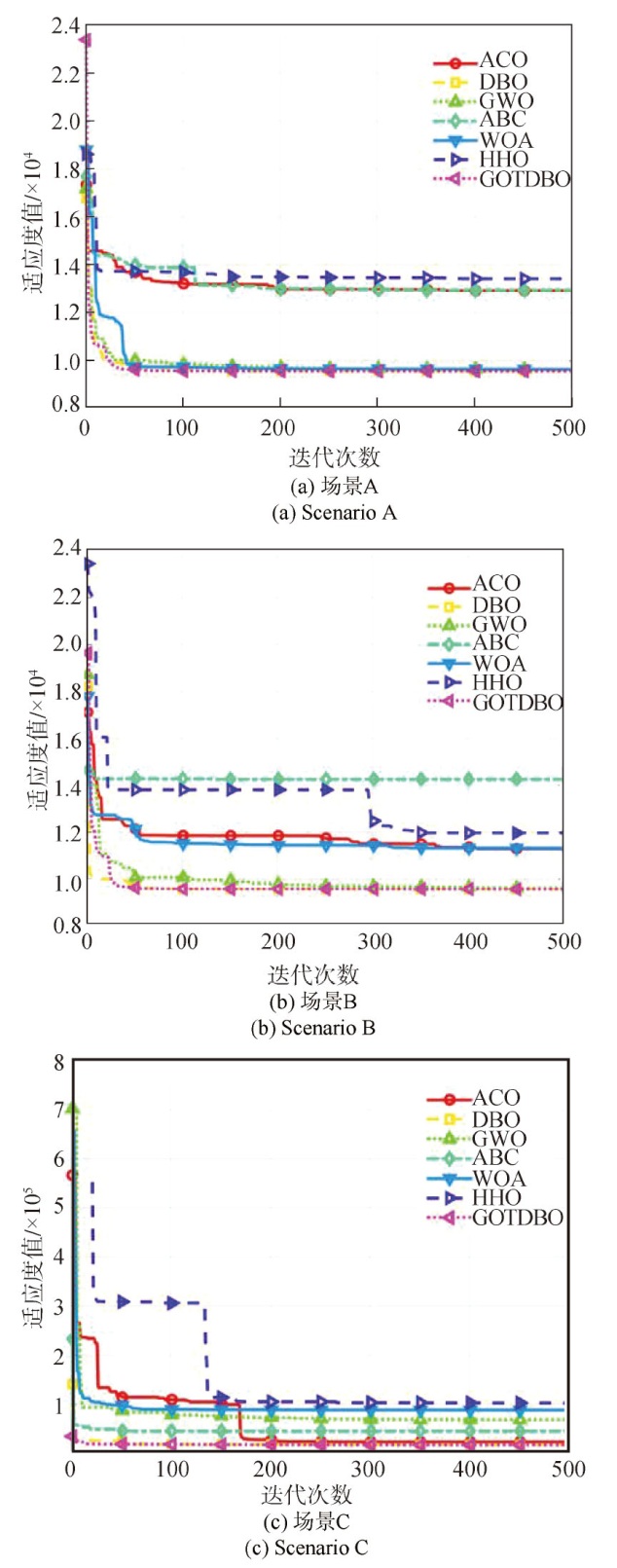
图10 3种场景下算法收敛曲线图
Fig.10 Algorithm convergence curves in three scenarios
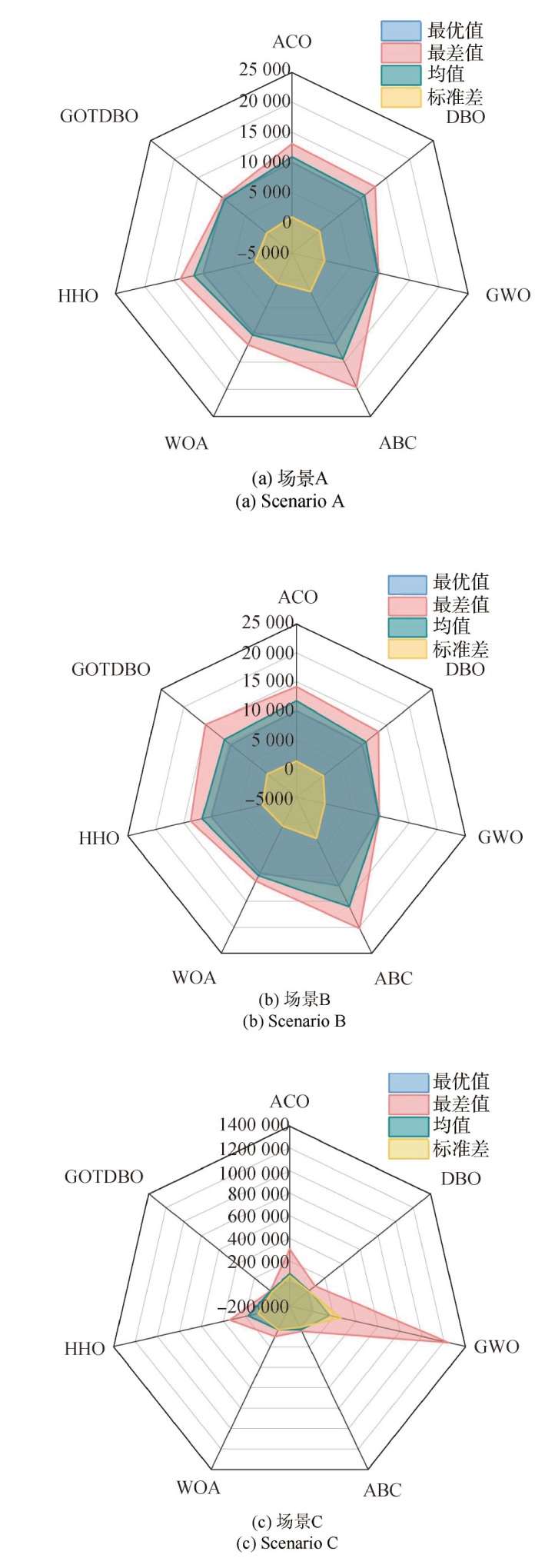
图11 3种场景下算法适应度值图
Fig.11 Algorithm fitness value diagrams in three scenarios
| 算法 | 场景A | 场景B | 场景C |
|---|---|---|---|
| ACO | 5.334298 | 6.973373 | 11.235155 |
| DBO | 5.038684 | 6.649935 | 10.443480 |
| GWO | 5.103155 | 6.392838 | 10.433408 |
| ABC | 5.102468 | 6.706328 | 10.700655 |
| WOA | 5.466211 | 6.332292 | 10.572490 |
| HHO | 11.832312 | 17.23000 | 27.527141 |
| GOTDBO | 5.028615 | 6.745984 | 10.456419 |
表11 航迹规划算法运行时间
Table 11 The running time of trajectory planning algorithm s
| 算法 | 场景A | 场景B | 场景C |
|---|---|---|---|
| ACO | 5.334298 | 6.973373 | 11.235155 |
| DBO | 5.038684 | 6.649935 | 10.443480 |
| GWO | 5.103155 | 6.392838 | 10.433408 |
| ABC | 5.102468 | 6.706328 | 10.700655 |
| WOA | 5.466211 | 6.332292 | 10.572490 |
| HHO | 11.832312 | 17.23000 | 27.527141 |
| GOTDBO | 5.028615 | 6.745984 | 10.456419 |
| 算法 | 最大航程/km | 威胁区域 接近次数 | 高度偏离 程度/km | 路径平滑度 |
|---|---|---|---|---|
| ACO | 1503.25 | 2 | 425.18 | 1 |
| DBO | 1665.42 | 2 | 493.08 | 1 |
| GWO | 1583.77 | 2 | 408.36 | 1 |
| ABC | 1259.09 | 2 | 411.73 | 1 |
| WOA | 1424.68 | 2 | 466.11 | 1 |
| HHO | 1678.45 | 2 | 493.08 | 1 |
| GWTDBO | 1233.59 | 2 | 393.08 | 1 |
表12 场景A航迹规划评价结果
Table 12 Evaluated results of trajectory planning for Scenario A
| 算法 | 最大航程/km | 威胁区域 接近次数 | 高度偏离 程度/km | 路径平滑度 |
|---|---|---|---|---|
| ACO | 1503.25 | 2 | 425.18 | 1 |
| DBO | 1665.42 | 2 | 493.08 | 1 |
| GWO | 1583.77 | 2 | 408.36 | 1 |
| ABC | 1259.09 | 2 | 411.73 | 1 |
| WOA | 1424.68 | 2 | 466.11 | 1 |
| HHO | 1678.45 | 2 | 493.08 | 1 |
| GWTDBO | 1233.59 | 2 | 393.08 | 1 |
| 算法 | 最大航程/km | 威胁区域 接近次数 | 高度偏离 程度/km | 路径平滑度 |
|---|---|---|---|---|
| ACO | 1552.28 | 4 | 435.37 | 1 |
| DBO | 1733.59 | 4 | 493.08 | 1 |
| GWO | 1567.33 | 5 | 413.71 | 1 |
| ABC | 1610.77 | 4 | 484.64 | 1 |
| WOA | 1733.59 | 4 | 493.08 | 1 |
| HHO | 1600.35 | 5 | 416.26 | 1 |
| GWTDBO | 1569.17 | 3 | 409.38 | 1 |
表13 场景B航迹规划评价结果
Table 13 Evaluated results of trajectory planning for Scenario B
| 算法 | 最大航程/km | 威胁区域 接近次数 | 高度偏离 程度/km | 路径平滑度 |
|---|---|---|---|---|
| ACO | 1552.28 | 4 | 435.37 | 1 |
| DBO | 1733.59 | 4 | 493.08 | 1 |
| GWO | 1567.33 | 5 | 413.71 | 1 |
| ABC | 1610.77 | 4 | 484.64 | 1 |
| WOA | 1733.59 | 4 | 493.08 | 1 |
| HHO | 1600.35 | 5 | 416.26 | 1 |
| GWTDBO | 1569.17 | 3 | 409.38 | 1 |
| 算法 | 最大航程/km | 威胁区域 接近次数 | 高度偏离 程度/km | 路径平滑度 |
|---|---|---|---|---|
| ACO | 1472.79 | 10 | 446.87 | 1 |
| DBO | 1261.96 | 10 | 468.77 | 1 |
| GWO | 1457.42 | 10 | 383.50 | 1 |
| ABC | 1521.77 | 10 | 388.09 | 1 |
| WOA | 1324.67 | 11 | 432.93 | 1 |
| HHO | 1423.34 | 10 | 392.74 | 1 |
| GWTDBO | 1192.43 | 9 | 388.69 | 1 |
表14 场景C航迹规划评价结果
Table 14 Evaluated results of trajectory planning for Scenario C
| 算法 | 最大航程/km | 威胁区域 接近次数 | 高度偏离 程度/km | 路径平滑度 |
|---|---|---|---|---|
| ACO | 1472.79 | 10 | 446.87 | 1 |
| DBO | 1261.96 | 10 | 468.77 | 1 |
| GWO | 1457.42 | 10 | 383.50 | 1 |
| ABC | 1521.77 | 10 | 388.09 | 1 |
| WOA | 1324.67 | 11 | 432.93 | 1 |
| HHO | 1423.34 | 10 | 392.74 | 1 |
| GWTDBO | 1192.43 | 9 | 388.69 | 1 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
孙曦, 刘峰, 薛晓. 基于透镜成像对立学习TSO算法的无人机三维航迹规划[J]. 电光与控制, 2024, 31(9):45-51,80.
|
|
|
|
| [5] |
|
| [6] |
陈都, 孟秀云. 基于自适应郊狼算法的无人机离线航迹规划[J]. 系统工程与电子技术, 2022, 44(2):603-611.
doi: 10.12305/j.issn.1001-506X.2022.02.30 |
|
doi: 10.12305/j.issn.1001-506X.2022.02.30 |
|
| [7] |
|
| [8] |
|
| [9] |
孔维立, 王峰, 周平华, 等. 改进蚁群算法的无人机三维路径规划[J]. 电光与控制, 2023, 30(3):63-69.
|
|
|
|
| [10] |
胡致远, 王征, 杨洋, 等. 基于人工鱼群-蚁群算法的UUV三维全局路径规划[J]. 兵工学报, 2022, 43(7):1676-1684.
doi: 10.12382/bgxb.2021.0215 |
|
|
|
| [11] |
文超, 董文瀚, 解武杰, 等. 基于CEA-GA的多无人机三维协同曲线航迹规划方法[J]. 北京航空航天大学学报, 2023, 49(11):3086-3099.
|
|
|
|
| [12] |
|
| [13] |
肖金壮, 余雪乐, 周刚, 等. 一种面向室内AGV路径规划的改进蚁群算法[J]. 仪器仪表学报, 2022, 43(3):277-285.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
潘劲成, 李少波, 周鹏, 等. 改进正弦算法引导的蜣螂优化算法[J]. 计算机工程与应用, 2023, 59(22):92-110.
doi: 10.3778/j.issn.1002-8331.2305-0021 |
|
doi: 10.3778/j.issn.1002-8331.2305-0021 |
|
| [17] |
隋东, 杨振宇, 丁松滨, 等. 基于EMSDBO算法的无人机三维航迹规划[J]. 系统工程与电子技术, 2024, 46(5):1756-1766.
doi: 10.12305/j.issn.1001-506X.2024.05.28 |
|
doi: 10.12305/j.issn.1001-506X.2024.05.28 |
|
| [18] |
华罗庚. 数论在近似分析中的应用[M]. 北京: 科学出版社, 1978.
|
|
|
|
| [19] |
郑新宇, 李媛, 刘晓琳. 改进北方苍鹰优化算法的收敛性及其性能对比分析[J]. 计算机科学与探索, 2024, 18(12):3203-3218.
doi: 10.3778/j.issn.1673-9418.2403073 |
|
|
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [1] | 纪录, 陈超, 陈恒. 基于改进蜣螂优化算法无人机三维航迹规划[J]. 兵工学报, 2025, 46(9): 241068-. |
| [2] | 张沛, 张安, 毕文豪, 毛泽铭. 无人机末端机动规避中远距空空导弹策略[J]. 兵工学报, 2025, 46(9): 240972-. |
| [3] | 王昱, 李远鹏, 郭中宇, 李硕, 任田君. 基于DDQN-D3PG的无人机空战分层决策[J]. 兵工学报, 2025, 46(8): 240978-. |
| [4] | 王卓峣, 李传军, 马景权, 于加其. 无动力滑翔飞行器集群实时协同航迹规划方法[J]. 兵工学报, 2025, 46(8): 240827-. |
| [5] | 李俊辉, 王伟, 王雨辰, 纪毅. 基于预设时间一致性理论的无人机编队控制[J]. 兵工学报, 2025, 46(8): 240863-. |
| [6] | 周乐, 尹乔之, 钟沛霖, 魏小辉, 聂宏. 基于数据融合的无人机自主择址技术[J]. 兵工学报, 2025, 46(8): 240751-. |
| [7] | 沈英, 张硕, 王舒, 苏云, 薛芳, 黄峰. 复杂场景伪装小目标机载偏振遥感检测方法[J]. 兵工学报, 2025, 46(7): 240797-. |
| [8] | 肖鹏, 于海霞, 黄龙, 张司明. 基于MDEPSO算法的无人机三维航迹规划[J]. 兵工学报, 2025, 46(7): 240710-. |
| [9] | 徐扬, 魏超, 冯付勇, 胡乐云. 基于时空解耦规划方法的无人机自主降落策略[J]. 兵工学报, 2025, 46(7): 240653-. |
| [10] | 王伟翰, 高铭泽, 施小龙, 胡诗苑, 吴沿江, 陈慧敏. 机载线阵激光雷达动态成像建模与验证[J]. 兵工学报, 2025, 46(6): 240836-. |
| [11] | 闫啸家, 朱惠民, 孙世岩, 石章松, 姜尚. 基于改进变异萤火虫优化粒子滤波的无人机目标定位[J]. 兵工学报, 2025, 46(5): 240549-. |
| [12] | 周桢林, 龙腾, 刘大卫, 孙景亮, 钟建鑫, 李俊志. 基于强化学习冲突消解的大规模无人机集群航迹规划方法[J]. 兵工学报, 2025, 46(5): 241146-. |
| [13] | 何子琦, 李博宸, 王成罡, 宋磊. 针对区域防御的多无人机序列捕捉算法[J]. 兵工学报, 2025, 46(4): 240343-. |
| [14] | 侯天乐, 毕文豪, 黄湛钧, 李铭浩, 张安. 基于事件触发的多智能体系统预设时间编队控制[J]. 兵工学报, 2025, 46(4): 240292-. |
| [15] | 李雅轩, 刘新福. 基于精确凸松弛的固定翼无人机实时轨迹规划[J]. 兵工学报, 2025, 46(3): 240362-. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4