
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (6): 240583-.doi: 10.12382/bgxb.2024.0583
冷呈宇, 赵津*( ), 刘畅, 杨世凤
), 刘畅, 杨世凤
收稿日期:2024-07-15
上线日期:2025-06-28
通讯作者:
基金资助:
LENG Chengyu, ZHAO Jin*(), LIU Chang, YANG Shifeng
Received:2024-07-15
Online:2025-06-28
摘要:
在空地协同场景下,特殊障碍物的识别与处理对地面装备安全运行至关重要。针对非结构化环境中样本稀缺的问题,构建了包含33 124张图像的检测数据集,覆盖多类典型特殊障碍物,支持复杂场景下的识别任务。为准确评估检测算法性能,设计融合类别信息与定位精度的综合评价指标,增强模型对比的科学性。提出结合物理属性与环境语义的可通行性分析方法,为地面无人系统路径规划提供依据。实验结果表明,该数据集与评估体系显著提升检测精度,所提方法能有效识别坑洞、水面等典型特殊障碍物。
中图分类号:
冷呈宇, 赵津, 刘畅, 杨世凤. 空地协同场景下特殊障碍物数据集与检测算法评估系统构建[J]. 兵工学报, 2025, 46(6): 240583-.
LENG Chengyu, ZHAO Jin, LIU Chang, YANG Shifeng. Construction of Special Obstacle Dataset and Detection Algorithm Evaluation System in Air-ground Collaborative Scenarios[J]. Acta Armamentarii, 2025, 46(6): 240583-.

图1 基于特殊障碍物检测的实现流程
Fig.1 Implementation process based on special obstacle detection
| 数据集 | 视角 | 障碍物类别 | 场景覆盖 |
|---|---|---|---|
| GRACO数据集[ | 地面, 空中 | 建筑相关障碍物 | 静态城市建筑 |
| UDTIRI数据集[ | 地面 | 道路坑洞 | 城市道路 |
| GRDDC数据集[ | 地面 | 道路裂缝、坑洞 | 道路环境 |
| NPDOID数据集[ | 地面 | 坑洼障碍物 | 道路环境 |
| 本文数据集 | 地面, 空中 | 常规障碍物(行人、车辆等) 特殊障碍物(石块、水坑等) | 空地协同 动态场景 |
表1 障碍物数据集视角、类别与场景覆盖对比分析
Table 1 Comparative analysis of viewpoints,categories,and scene coverage in obstacle detection datasets
| 数据集 | 视角 | 障碍物类别 | 场景覆盖 |
|---|---|---|---|
| GRACO数据集[ | 地面, 空中 | 建筑相关障碍物 | 静态城市建筑 |
| UDTIRI数据集[ | 地面 | 道路坑洞 | 城市道路 |
| GRDDC数据集[ | 地面 | 道路裂缝、坑洞 | 道路环境 |
| NPDOID数据集[ | 地面 | 坑洼障碍物 | 道路环境 |
| 本文数据集 | 地面, 空中 | 常规障碍物(行人、车辆等) 特殊障碍物(石块、水坑等) | 空地协同 动态场景 |
| 特殊障碍 物对象 | 标注数目 | 潜在特殊障 碍物对象 | 标注数目 |
|---|---|---|---|
| 坑洞 | 48509 | 物料堆 | 1684 |
| 水面 | 22384 | 管道 | 2383 |
| 沟槽 | 1315 | 石块 | 21948 |
表2 潜在特殊障碍物、特殊障碍物类别名称及标注数目
Table 2 Category names and annotation counts of potential special obstacles and special obstacles
| 特殊障碍 物对象 | 标注数目 | 潜在特殊障 碍物对象 | 标注数目 |
|---|---|---|---|
| 坑洞 | 48509 | 物料堆 | 1684 |
| 水面 | 22384 | 管道 | 2383 |
| 沟槽 | 1315 | 石块 | 21948 |
| 常规障碍 物对象 | 标注数目 | 常规障碍 物对象 | 标注数目 |
|---|---|---|---|
| 三轮车 | 3844 | 摩托车 | 36107 |
| 自行车 | 11678 | 行人 | 95716 |
| 公交车 | 8241 | 卡车 | 14626 |
| 汽车 | 168283 | 面包车 | 29948 |
表3 常规障碍物类别名称及标注数目
Table 3 Category names and annotation counts of regular obstacles
| 常规障碍 物对象 | 标注数目 | 常规障碍 物对象 | 标注数目 |
|---|---|---|---|
| 三轮车 | 3844 | 摩托车 | 36107 |
| 自行车 | 11678 | 行人 | 95716 |
| 公交车 | 8241 | 卡车 | 14626 |
| 汽车 | 168283 | 面包车 | 29948 |

图2 目标检测结果
Fig.2 The results of object detection

图3 采用RGB-D相机识别坑洞到UAV的距离
Fig.3 The distance from pothole to UAV identified by RGB-D camera

图4 边界扩展策略计算坑洞深度
Fig.4 Boundary extension strategy to calculate the depth of potholes

图5 使用RGB-D相机识别水面、水坑到UAV的距离
Fig.5 Use RGB-D camera to identify the distance between the water surface, puddle and UAV

图6 水面、水坑等障碍物与视觉地图的交互
Fig.6 Interaction between obstacles,such as water surfaces and puddles,and visual maps
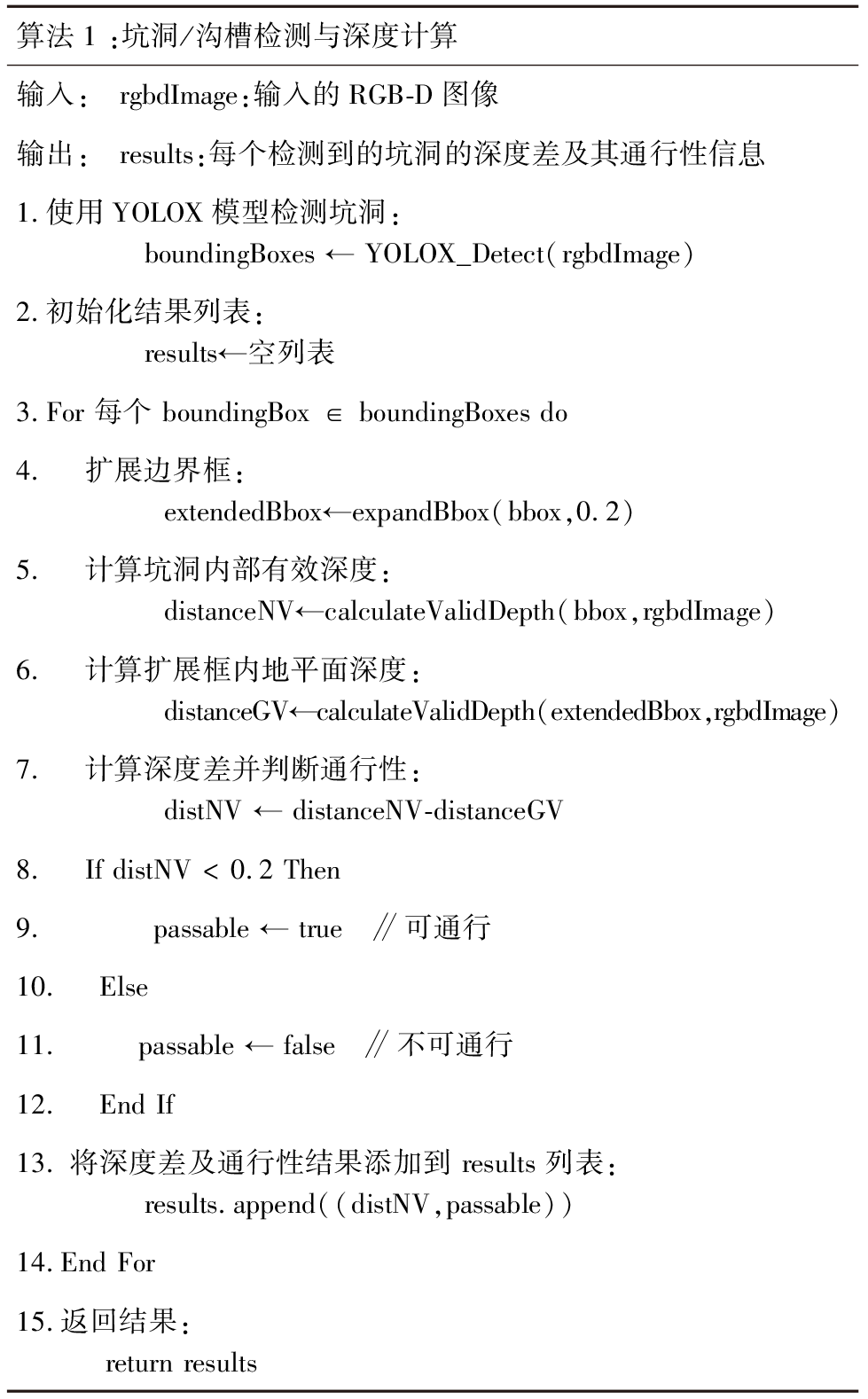
图7 算法1:坑洞、沟槽检测与深度计算
Fig.7 Algorithm 1:pothole and trench detection and depth calculation
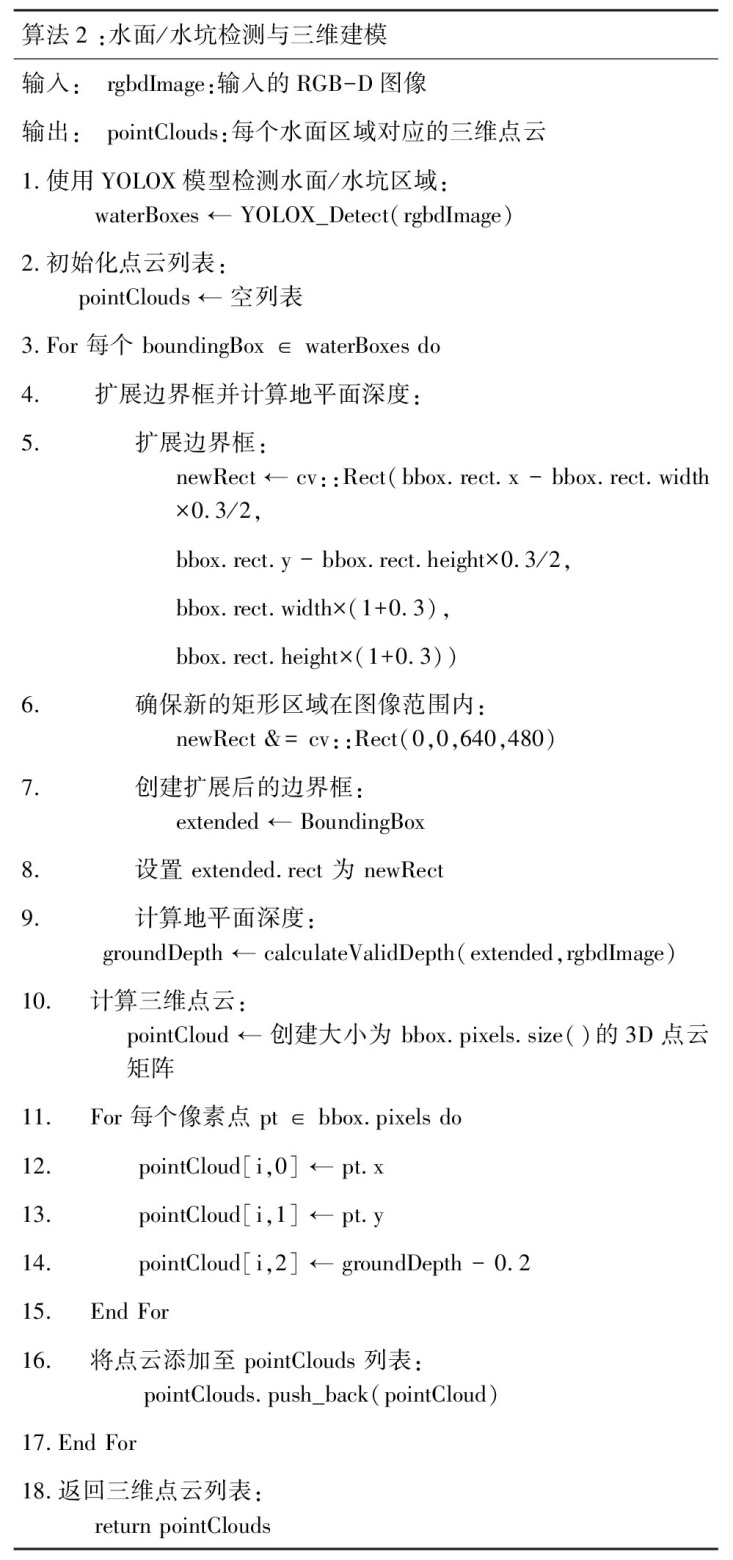
图8 算法2:水面、水坑检测与三维建模
Fig.8 Algorithm 2:water surface and pothole detection and 3D modeling
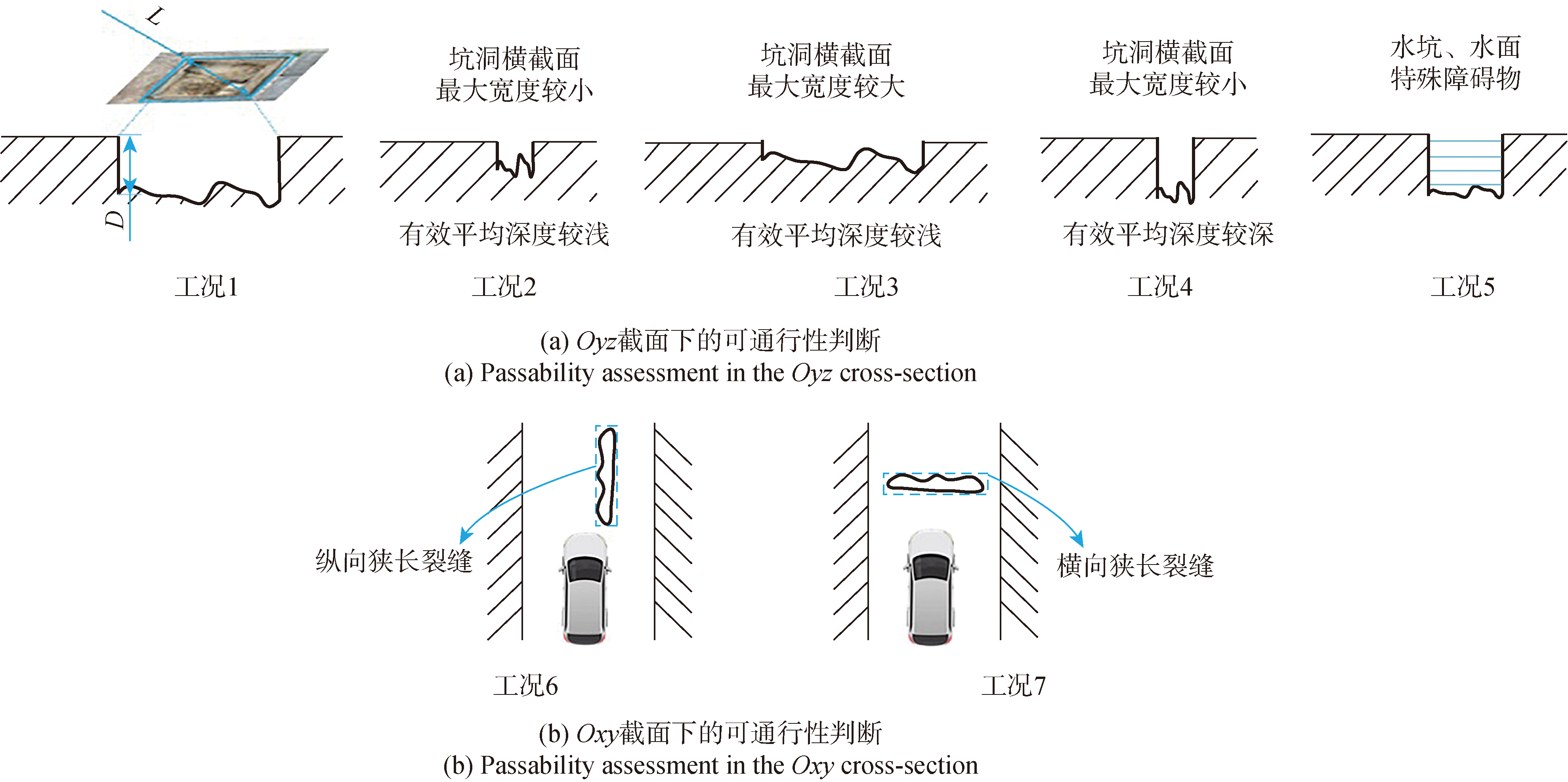
图9 UGV可通行性的工况分析
Fig.9 Condition analysis of UGV passability
| 硬件 | 类型 | 设备规格 |
|---|---|---|
| 智能装备1 | UAV | JETSON Xavier开发板;8核;32GB内存;RGB-D深度相机,IMU和GPS传感器 |
| 智能装备2 | 线控底盘车 | Nuvo-8108GC;Intel Core i9-9900K CPU;32GB |
表4 硬件配置
Table 4 Hardware configuration
| 硬件 | 类型 | 设备规格 |
|---|---|---|
| 智能装备1 | UAV | JETSON Xavier开发板;8核;32GB内存;RGB-D深度相机,IMU和GPS传感器 |
| 智能装备2 | 线控底盘车 | Nuvo-8108GC;Intel Core i9-9900K CPU;32GB |
| 模型 | 训练损失 | CS-mAP | 模型 | 训练损失 | CS-mAP |
|---|---|---|---|---|---|
| YOLOv2 | | | YOLOv5 | | |
| YOLOv3 | | | YOLOv6 | | |
| YOLOv4 | | | YOLOv7 | | |
| YOLOv8 | | | YOLOv10 | | |
| YOLOv9 | | | YOLOX | | |
表5 YOLO系列模型训练过程可视化
Table 5 Visualization of YOLO series model training process
| 模型 | 训练损失 | CS-mAP | 模型 | 训练损失 | CS-mAP |
|---|---|---|---|---|---|
| YOLOv2 | | | YOLOv5 | | |
| YOLOv3 | | | YOLOv6 | | |
| YOLOv4 | | | YOLOv7 | | |
| YOLOv8 | | | YOLOv10 | | |
| YOLOv9 | | | YOLOX | | |
| 网络模型 | 参数量/ 106 | 坑洞 CSP/% | 水面 CSP/% | 沟槽 CSP/% | CS-mAP/% | CEI |
|---|---|---|---|---|---|---|
| YOLOv2 | 23 | 81.02 | 83.24 | 77.45 | 80.57 | 24.25 |
| YOLOv3 | 240 | 85.95 | 89.13 | 84.26 | 86.44 | 28.49 |
| YOLOv4 | 195 | 84.33 | 89.39 | 81.62 | 85.11 | 26.81 |
| YOLOv5 | 27 | 88.29 | 87.82 | 83.35 | 86.48 | 27.31 |
| YOLOv6 | 80 | 85.66 | 92.46 | 86.15 | 87.09 | 27.33 |
| YOLOv7 | 145 | 97.61 | 93.05 | 90.92 | 93.86 | 30.26 |
| YOLOv8 | 173 | 97.64 | 93.15 | 90.38 | 93.16 | 30.26 |
| YOLOv9 | 122 | 98.27 | 94.23 | 91.12 | 95.11 | 31.08 |
| YOLOv10 | 211 | 99.11 | 96.16 | 93.27 | 96.27 | 31.97 |
| YOLOX | 67 | 89.93 | 90.19 | 89.86 | 89.99 | 27.22 |
表6 特殊障碍物数据集的目标检测精度对比
Table 6 Comparison of object detection accuracies for special obstacle datasets
| 网络模型 | 参数量/ 106 | 坑洞 CSP/% | 水面 CSP/% | 沟槽 CSP/% | CS-mAP/% | CEI |
|---|---|---|---|---|---|---|
| YOLOv2 | 23 | 81.02 | 83.24 | 77.45 | 80.57 | 24.25 |
| YOLOv3 | 240 | 85.95 | 89.13 | 84.26 | 86.44 | 28.49 |
| YOLOv4 | 195 | 84.33 | 89.39 | 81.62 | 85.11 | 26.81 |
| YOLOv5 | 27 | 88.29 | 87.82 | 83.35 | 86.48 | 27.31 |
| YOLOv6 | 80 | 85.66 | 92.46 | 86.15 | 87.09 | 27.33 |
| YOLOv7 | 145 | 97.61 | 93.05 | 90.92 | 93.86 | 30.26 |
| YOLOv8 | 173 | 97.64 | 93.15 | 90.38 | 93.16 | 30.26 |
| YOLOv9 | 122 | 98.27 | 94.23 | 91.12 | 95.11 | 31.08 |
| YOLOv10 | 211 | 99.11 | 96.16 | 93.27 | 96.27 | 31.97 |
| YOLOX | 67 | 89.93 | 90.19 | 89.86 | 89.99 | 27.22 |
| 模型 | 序号 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |||||||
| YOLOv2 | | | | | | | ||||||
| YOLOv3 | | | | | | | ||||||
| YOLOv4 | | | | | | | ||||||
| YOLOv5 | | | | | | | ||||||
| YOLOv6 | | | | | | | ||||||
| YOLOv7 | | | | | | | ||||||
| YOLOv8 | | | | | | | ||||||
| YOLOv9 | | | | | | | ||||||
| YOLOv10 | | | | | | | ||||||
| YOLOX | | | | | | | ||||||
表7 特殊障碍物检测可视化
Table 7 Visualization of special obstacle detection
| 模型 | 序号 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | |||||||
| YOLOv2 | | | | | | | ||||||
| YOLOv3 | | | | | | | ||||||
| YOLOv4 | | | | | | | ||||||
| YOLOv5 | | | | | | | ||||||
| YOLOv6 | | | | | | | ||||||
| YOLOv7 | | | | | | | ||||||
| YOLOv8 | | | | | | | ||||||
| YOLOv9 | | | | | | | ||||||
| YOLOv10 | | | | | | | ||||||
| YOLOX | | | | | | | ||||||

图10 UAV与坑洞、沟槽的交互过程
Fig.10 The interaction process among UAV and potholes and trenches

图11 UAV与水面、水坑的交互过程
Fig.11 Interaction process between UAV and water surfaces/puddles
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
赵一兵, 郭烈, 李明丽, 等. 无人地面车辆野外水体障碍物识别[J]. 兵工学报, 2014, 35 (增刊1):62-67.
|
|
|
|
| [14] |
刘家银, 唐振民, 王安东, 等. 基于多激光雷达与组合特征的非结构化环境负障碍物检测[J]. 机器人, 2017, 39(05):638-651.
|
|
|
|
| [15] |
|
| [16] |
|
| [17] |
阮顺领, 鄢盛钰, 顾清华, 等. 基于多特征融合的露天矿区道路负障碍检测[J]. 煤炭学报, 2024, 49(5):2561-2572.
|
|
|
|
| [18] |
|
| [19] |
付浩龙, 赵津, 席阿行, 等. 无人机视觉下基于改进OTSU的负障碍物检测[J]. 计算机应用与软件, 2020, 37(9):105-110.
|
|
|
|
| [20] |
|
| [21] |
金政北, 金贝贝, 宋晓辉, 等. 改进YOLOv10算法及其在路面坑洼检测中的应用[J/OL]. 计算机应用与软件, 2025(2025-03-11). http://kns.cnki.net/kcms/detail/31.1260.tp.20250307.0824.002.htm.
|
|
|
|
| [22] |
|
| [1] | 翟伟光, 王峰, 马星宇, 赵薇, 孟鹏帅. YSG-SLAM:动态场景下基于YOLACT的实时语义RGB-D SLAM系统[J]. 兵工学报, 2025, 46(6): 240443-. |
| [2] | 马雨薇, 武伟超, 王伟, 牛爱林, 郭志明, 杨建新. 面向无人平台建筑内导航的地图轻量化处理与楼梯区域分类方法[J]. 兵工学报, 2025, 46(6): 240483-. |
| [3] | 苏家豪, 刘思宇, 卢春雷, 郭朝, 王志瑞, 闫曈, 党睿娜, 苏波. 用于四足机器人的离散式串联弹性脊柱关节设计[J]. 兵工学报, 2025, 46(4): 240350-. |
| [4] | 赵薇, 王峰, 马星宇, 翟伟光, 孟鹏帅. 基于动态区域剔除与稠密地图构建的视觉SLAM算法[J]. 兵工学报, 2025, 46(3): 240217-. |
| [5] | 董明泽, 温庄磊, 陈锡爱, 杨炅坤, 曾涛. 安全凸空间与深度强化学习结合的机器人导航方法[J]. 兵工学报, 2024, 45(12): 4372-4382. |
| [6] | 邢伯阳, 许威, 李宇峰, 赵浩宇, 王康, 闫曈. 基于分层解耦的四轮足机器人模型预测控制[J]. 兵工学报, 2024, 45(12): 4272-4282. |
| [7] | 李仲, 管小荣, 李回滨, 何龙, 龙亿. 有源刚性下肢助力外骨骼研究现状与关键技术分析[J]. 兵工学报, 2024, 45(S1): 262-270. |
| [8] | 李回滨, 马贺, 刘鹏飞, 杨沛应, 管小荣. 外肢体发展现状分析与军事应用前景展望[J]. 兵工学报, 2024, 45(S1): 287-295. |
| [9] | 党婉莹, 周乐来, 李贻斌, 张辰. 模块化机器人最优越野构型神经网络规划方法[J]. 兵工学报, 2024, 45(10): 3674-3685. |
| [10] | 孙鹏耀, 黄炎焱, 王凯生. 基于势场增强烟花算法的二维全局路径规划[J]. 兵工学报, 2024, 45(10): 3499-3518. |
| [11] | 陈琦, 覃国样. 混合驱动水下机器人浮游与爬行双模式轨迹跟踪控制[J]. 兵工学报, 2024, 45(9): 3216-3229. |
| [12] | 刘亚丽, 鲁妍池, 徐小龙, 宋遒志. 外骨骼机器人助力效能测试方法及应用综述[J]. 兵工学报, 2024, 45(8): 2497-2519. |
| [13] | 潘作栋, 周悦, 郭威, 徐高飞, 孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128. |
| [14] | 张天艺, 郑颖, 裘信国, 季行健, 金晓航. 基于特征模型的5阶关节伺服系统扰动补偿策略[J]. 兵工学报, 2024, 45(1): 276-287. |
| [15] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4