
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (6): 240443-.doi: 10.12382/bgxb.2024.0443
翟伟光1, 王峰2,*, 马星宇1, 赵薇1, 孟鹏帅1
收稿日期:2024-06-05
上线日期:2025-06-28
通讯作者:
基金资助:ZHAI Weiguang1, WANG Feng2,*, MA Xingyu1, ZHAO Wei1, MENG Pengshuai1
Received:2024-06-05
Online:2025-06-28
摘要:
针对动态环境中实时定位与建图(Simultaneous Localization and Mapping,SLAM)算法位姿估计存在的定位漂移、实时性差等问题,提出一个名为YSG-SLAM的实时语义RGB-D SLAM系统。为了提高系统实时性,新增两个并行线程:一个用于获取二维语义信息的语义分割线程,一个语义建图线程。为优化系统在处理动态物体时的准确性和鲁棒性,YSG-SLAM引入快速动态特征剔除算法,并耦合漏检补偿模块来应对基于实时实例分割(You Only Look At Coefficients,YOLACT)算法可能出现的漏检情况,有效地提升了特征点剔除的精确度和系统的整体稳定性。为减少由特征点聚集引起的定位误差从而优化特征点的空间分布,设计自适应角点提取阈值计算方法,使特征分布更加均匀。语义建图线程充分利用二维语义信息与三维点云数据,可选择性构建语义地图和八叉树地图,提高了系统的环境感知能力及机器人在复杂环境下的相关任务执行能力。YSG-SLAM在德国慕尼黑工业大学数据集、Bonn数据集上进行了评估,相较于原ORB-SLAM2,各项定位误差下降达93%。实验结果表明,YSG-SLAM有效提升了系统实时性,定位精度高,且可构建两种地图,具有一定的实用价值。
中图分类号:
翟伟光, 王峰, 马星宇, 赵薇, 孟鹏帅. YSG-SLAM:动态场景下基于YOLACT的实时语义RGB-D SLAM系统[J]. 兵工学报, 2025, 46(6): 240443-.
ZHAI Weiguang, WANG Feng, MA Xingyu, ZHAO Wei, MENG Pengshuai. YSG-SLAM:a Real-time Semantic RGB-D SLAM Based on YOLACT in Dynamic Scene[J]. Acta Armamentarii, 2025, 46(6): 240443-.
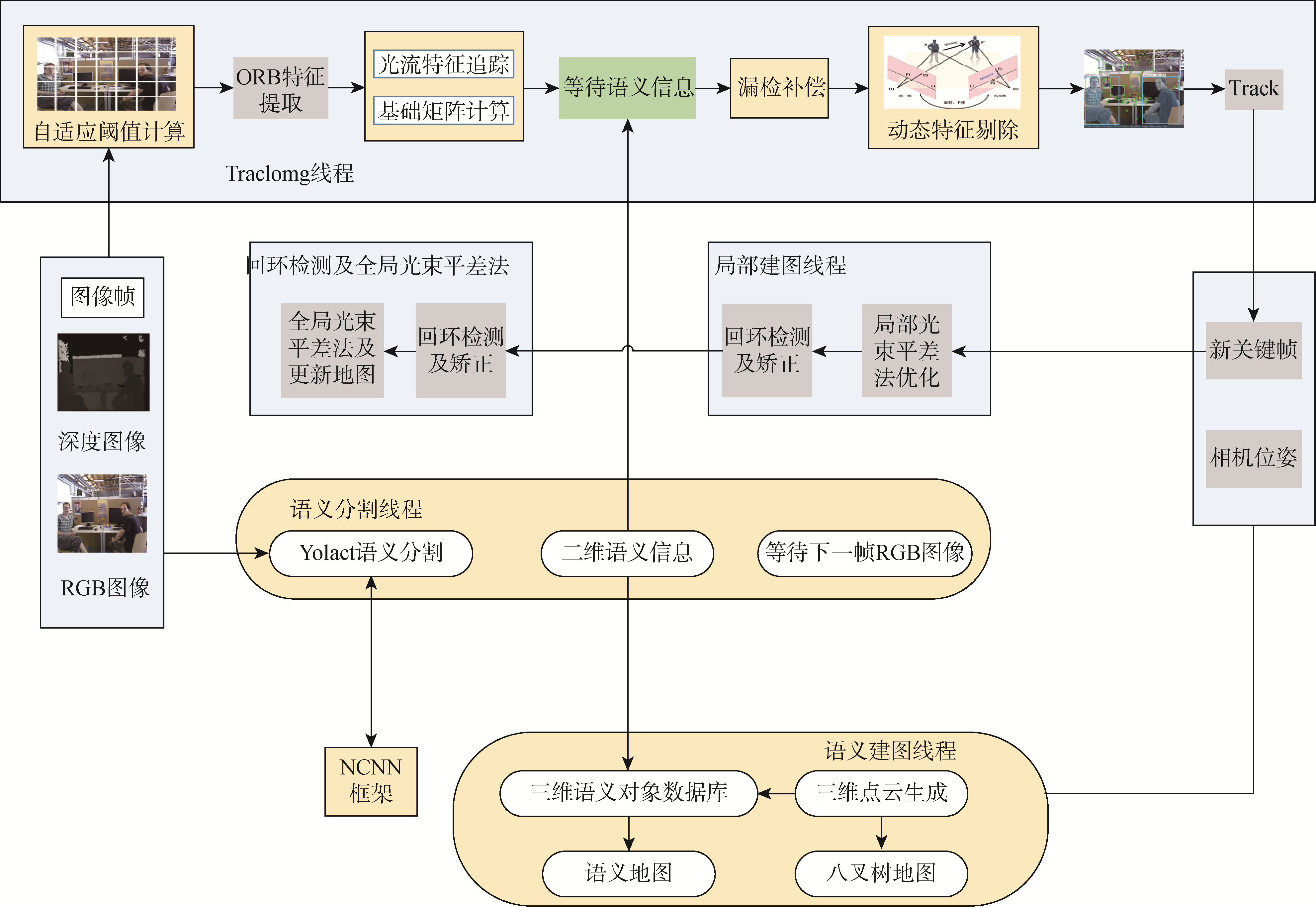
图1 系统框架
Fig.1 System framework

图2 TUM数据集fr3_w_xyz图像序列上的特征提取效果对比
Fig.2 Comparison of feature extraction on fr3_w_xyz image sequence of TUM datasets

图3 漏检对象边缘点投影过程
Fig.3 Projection process of edge points of missed detection objects

图4 动态特征剔除策略流程图
Fig.4 Flow chart of dynamic feature removal strategy
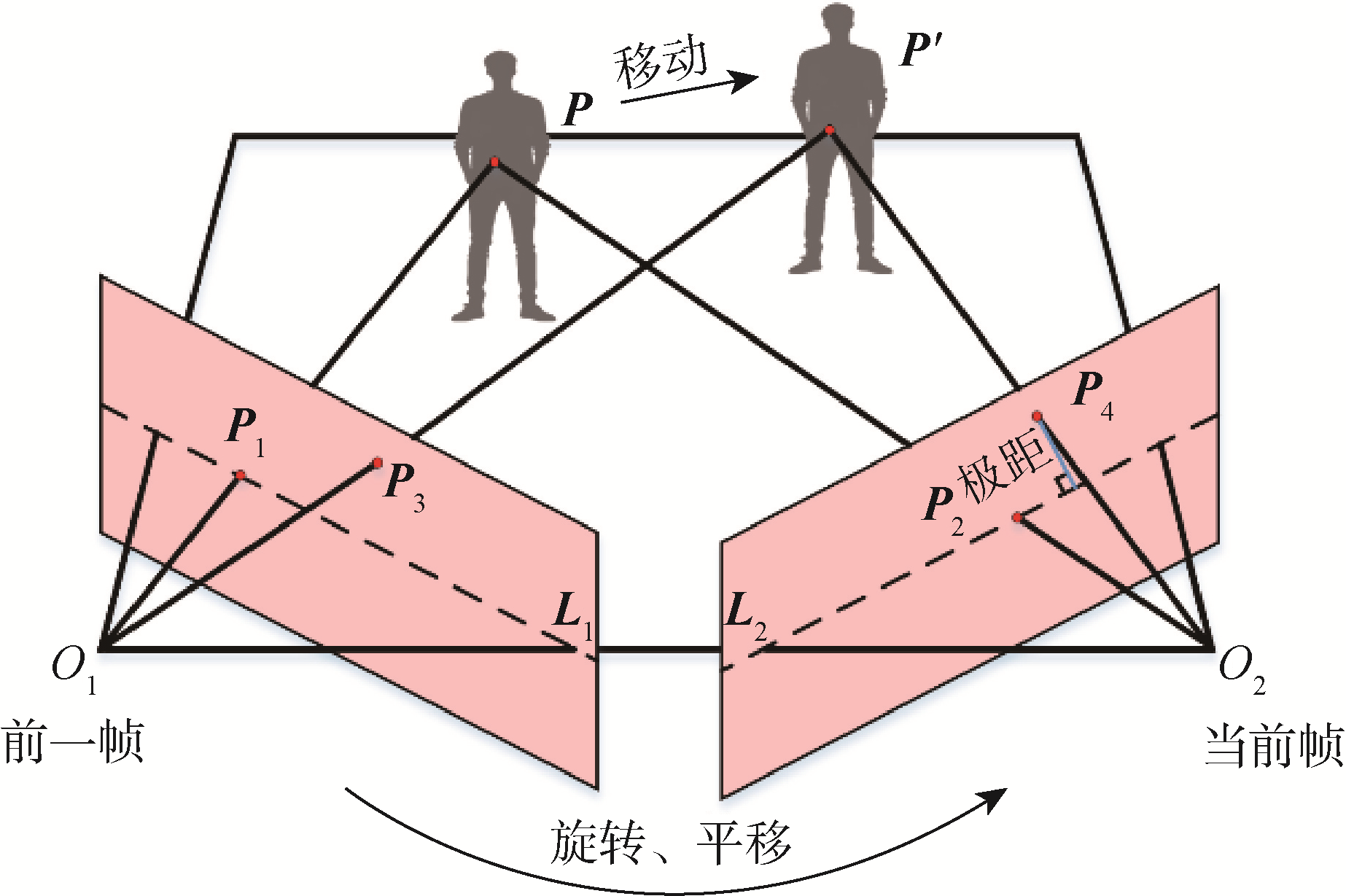
图5 极线约束
Fig.5 Epipolar constraint

图6 动态特征剔除效果
Fig.6 Dynamic feature removal effect
| 图像序列 | 原始图像 | ORB-SLAM2 | YSG-SLAM |
|---|---|---|---|
| v_bird | | | |
| v_coffeehouse | | | |
| v_pomegranate | | | |
表1 HPatches数据集上两算法特征提取效果对比
Table 1 Comparison of feature extraction effects of two algorithms on HPatches dataset
| 图像序列 | 原始图像 | ORB-SLAM2 | YSG-SLAM |
|---|---|---|---|
| v_bird | | | |
| v_coffeehouse | | | |
| v_pomegranate | | | |
| 两种算法及 提升率/% | 图像序列 | ||||
|---|---|---|---|---|---|
| v_bird | v_pomegranate | v_underground | v_dogman | v_coffeehouse | |
| ORB-SLAM2 | 4.65424 | 4.27598 | 4.50987 | 3.98462 | 3.88937 |
| YSG-SLAM | 5.65170 | 5.84350 | 5.69493 | 5.31122 | 5.69493 |
| 提升率/% | 21.0 | 36.7 | 30.6 | 33.3 | 46.4 |
表2 两种算法在HPatches数据集不同图像序列上的二维分布熵结果
Table 2 Two-dimensional distribution entropy results of two algorithms on different image sequences of Hpatches dataset
| 两种算法及 提升率/% | 图像序列 | ||||
|---|---|---|---|---|---|
| v_bird | v_pomegranate | v_underground | v_dogman | v_coffeehouse | |
| ORB-SLAM2 | 4.65424 | 4.27598 | 4.50987 | 3.98462 | 3.88937 |
| YSG-SLAM | 5.65170 | 5.84350 | 5.69493 | 5.31122 | 5.69493 |
| 提升率/% | 21.0 | 36.7 | 30.6 | 33.3 | 46.4 |
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.2899 | 0.2606 | 0.2484 | 0.1271 | 0.1619 | 0.1376 | 0.1136 | 0.0854 | 44.15 | 47.20 | 54.27 | 32.81 |
| fr3_w_half | 7.9219 | 4.4695 | 1.2568 | 6.5406 | 0.4142 | 0.3507 | 0.3022 | 0.2204 | 94.77 | 92.15 | 75.95 | 96.63 |
| fr3_w_rpy | 6.4220 | 4.5134 | 2.2990 | 4.5685 | 0.5450 | 0.4130 | 0.3233 | 0.3556 | 91.51 | 90.85 | 85.94 | 92.22 |
| fr3_w_xyz | 7.1415 | 5.6403 | 4.6159 | 4.3804 | 0.3997 | 0.2816 | 0.2298 | 0.2836 | 94.40 | 95.01 | 95.02 | 93.53 |
表3 相对位姿误差旋转部分对比结果
Table 3 Comparison results of RPE in rotation part
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.2899 | 0.2606 | 0.2484 | 0.1271 | 0.1619 | 0.1376 | 0.1136 | 0.0854 | 44.15 | 47.20 | 54.27 | 32.81 |
| fr3_w_half | 7.9219 | 4.4695 | 1.2568 | 6.5406 | 0.4142 | 0.3507 | 0.3022 | 0.2204 | 94.77 | 92.15 | 75.95 | 96.63 |
| fr3_w_rpy | 6.4220 | 4.5134 | 2.2990 | 4.5685 | 0.5450 | 0.4130 | 0.3233 | 0.3556 | 91.51 | 90.85 | 85.94 | 92.22 |
| fr3_w_xyz | 7.1415 | 5.6403 | 4.6159 | 4.3804 | 0.3997 | 0.2816 | 0.2298 | 0.2836 | 94.40 | 95.01 | 95.02 | 93.53 |
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0093 | 0.0082 | 0.0074 | 0.0044 | 0.0053 | 0.0046 | 0.0040 | 0.0026 | 43.01 | 43.90 | 45.95 | 40.91 |
| fr3_w_half | 0.3685 | 0.2072 | 0.0491 | 0.3047 | 0.0137 | 0.0114 | 0.0096 | 0.0076 | 96.28 | 94.50 | 80.45 | 97.51 |
| fr3_w_rpy | 0.3374 | 0.2344 | 0.1137 | 0.2426 | 0.0221 | 0.0163 | 0.0121 | 0.0149 | 93.45 | 93.05 | 89.36 | 93.86 |
| fr3_w_xyz | 0.3752 | 0.2944 | 0.2394 | 0.2326 | 0.0128 | 0.0102 | 0.0084 | 0.0078 | 96.59 | 96.54 | 96.49 | 96.65 |
表4 相对位姿误差平移部分对比结果
Table 4 Comparison results of RPE in translation part
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0093 | 0.0082 | 0.0074 | 0.0044 | 0.0053 | 0.0046 | 0.0040 | 0.0026 | 43.01 | 43.90 | 45.95 | 40.91 |
| fr3_w_half | 0.3685 | 0.2072 | 0.0491 | 0.3047 | 0.0137 | 0.0114 | 0.0096 | 0.0076 | 96.28 | 94.50 | 80.45 | 97.51 |
| fr3_w_rpy | 0.3374 | 0.2344 | 0.1137 | 0.2426 | 0.0221 | 0.0163 | 0.0121 | 0.0149 | 93.45 | 93.05 | 89.36 | 93.86 |
| fr3_w_xyz | 0.3752 | 0.2944 | 0.2394 | 0.2326 | 0.0128 | 0.0102 | 0.0084 | 0.0078 | 96.59 | 96.54 | 96.49 | 96.65 |
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0087 | 0.0078 | 0.0072 | 0.0039 | 0.0056 | 0.0048 | 0.0042 | 0.0029 | 35.63 | 38.46 | 41.67 | 25.64 |
| fr3_w_half | 0.4462 | 0.4096 | 0.3860 | 0.1770 | 0.0185 | 0.0163 | 0.0149 | 0.0087 | 95.85 | 96.02 | 96.14 | 95.08 |
| fr3_w_rpy | 0.5396 | 0.5012 | 0.4974 | 0.1999 | 0.0264 | 0.0218 | 0.0186 | 0.0148 | 95.11 | 95.65 | 96.26 | 92.60 |
| fr3_w_xyz | 0.6826 | 0.6086 | 0.6661 | 0.3091 | 0.0133 | 0.0112 | 0.0099 | 0.0071 | 98.05 | 98.16 | 98.51 | 97.70 |
表5 绝对轨迹误差对比结果
Table 5 Comparison results of ATE
| 图像序列 | ORB-SLAM2 | YSG-SLAM | 提升率/% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0087 | 0.0078 | 0.0072 | 0.0039 | 0.0056 | 0.0048 | 0.0042 | 0.0029 | 35.63 | 38.46 | 41.67 | 25.64 |
| fr3_w_half | 0.4462 | 0.4096 | 0.3860 | 0.1770 | 0.0185 | 0.0163 | 0.0149 | 0.0087 | 95.85 | 96.02 | 96.14 | 95.08 |
| fr3_w_rpy | 0.5396 | 0.5012 | 0.4974 | 0.1999 | 0.0264 | 0.0218 | 0.0186 | 0.0148 | 95.11 | 95.65 | 96.26 | 92.60 |
| fr3_w_xyz | 0.6826 | 0.6086 | 0.6661 | 0.3091 | 0.0133 | 0.0112 | 0.0099 | 0.0071 | 98.05 | 98.16 | 98.51 | 97.70 |
| 图像序列 | ORB-SLAM2 | YSG-SLAM |
|---|---|---|
| fr3_s_static | | |
| fr3_w_half | | |
| fr3_w_rpy | | |
| fr3_w_xyz | | |
表6 TUM数据集上两系统绝对轨迹误差对比结果
Table 6 Comparative results of ATEs of two systems on TUM dataset
| 图像序列 | ORB-SLAM2 | YSG-SLAM |
|---|---|---|
| fr3_s_static | | |
| fr3_w_half | | |
| fr3_w_rpy | | |
| fr3_w_xyz | | |
| 图像序列 | AHY-SLAM | DS-SLAM | DynaSLAM | SG-SLAM | RDS-SLAM | YSG-SLAM | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | |
| fr3_s_static | 0.0081 | 0.0047 | 0.0065 | 0.0033 | 0.006 | - | 0.0060 | 0.0053 | 0.0084 | 0.0043 | 0.0056 | 0.0029 |
| fr3_w_half | 0.0309 | 0.0156 | 0.0303 | 0.0159 | 0.025 | - | 0.0268 | 0.0134 | 0.0807 | 0.0454 | 0.0185 | 0.0087 |
| fr3_w_rpy | 0.1843 | 0.1538 | 0.4442 | 0.2350 | 0.035 | - | 0.0324 | 0.0187 | 0.1604 | 0.0873 | 0.0264 | 0.0148 |
| fr3_w_xyz | 0.0178 | 0.0096 | 0.0247 | 0.0161 | 0.015 | - | 0.0152 | 0.0075 | 0.0571 | 0.0229 | 0.0133 | 0.0071 |
表7 YSG-SLAM与同类型SOTA的绝对轨迹误差比较
Table 7 Comparison of ATEs of YSG-SLAM and similar SOTA
| 图像序列 | AHY-SLAM | DS-SLAM | DynaSLAM | SG-SLAM | RDS-SLAM | YSG-SLAM | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | 均方根 | 标准差 | |
| fr3_s_static | 0.0081 | 0.0047 | 0.0065 | 0.0033 | 0.006 | - | 0.0060 | 0.0053 | 0.0084 | 0.0043 | 0.0056 | 0.0029 |
| fr3_w_half | 0.0309 | 0.0156 | 0.0303 | 0.0159 | 0.025 | - | 0.0268 | 0.0134 | 0.0807 | 0.0454 | 0.0185 | 0.0087 |
| fr3_w_rpy | 0.1843 | 0.1538 | 0.4442 | 0.2350 | 0.035 | - | 0.0324 | 0.0187 | 0.1604 | 0.0873 | 0.0264 | 0.0148 |
| fr3_w_xyz | 0.0178 | 0.0096 | 0.0247 | 0.0161 | 0.015 | - | 0.0152 | 0.0075 | 0.0571 | 0.0229 | 0.0133 | 0.0071 |
| 图像序列 | ORB-SLAM2 | SG-SLAM | YSG-SLAM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| crowd_1 | 0.8632 | 0.6284 | 0.3592 | 0.5918 | 0.0234 | 0.0185 | 0.0161 | 0.0143 | 0.0742 | 0.0667 | 0.0572 | 0.0323 |
| m_n_box1 | 0.1174 | 0.0935 | 0.0785 | 0.0710 | 0.0192 | 0.0174 | 0.0156 | 0.0081 | 0.0447 | 0.0269 | 0.0219 | 0.0357 |
| p_tracking_2 | 1.0679 | 0.9590 | 0.8732 | 0.4699 | 0.0376 | 0.0343 | 0.0312 | 0.0154 | 0.0336 | 0.0262 | 0.0254 | 0.0163 |
| synchronous_1 | 1.1411 | 0.9884 | 0.9179 | 0.5703 | 0.3229 | 0.2665 | 0.1722 | 0.1824 | 0.0609 | 0.0058 | 0.0056 | 0.0032 |
表8 Boon数据集上的绝对轨迹误差比较
Table 8 Comparison of absolute trajectory errors on Boon dataset
| 图像序列 | ORB-SLAM2 | SG-SLAM | YSG-SLAM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| crowd_1 | 0.8632 | 0.6284 | 0.3592 | 0.5918 | 0.0234 | 0.0185 | 0.0161 | 0.0143 | 0.0742 | 0.0667 | 0.0572 | 0.0323 |
| m_n_box1 | 0.1174 | 0.0935 | 0.0785 | 0.0710 | 0.0192 | 0.0174 | 0.0156 | 0.0081 | 0.0447 | 0.0269 | 0.0219 | 0.0357 |
| p_tracking_2 | 1.0679 | 0.9590 | 0.8732 | 0.4699 | 0.0376 | 0.0343 | 0.0312 | 0.0154 | 0.0336 | 0.0262 | 0.0254 | 0.0163 |
| synchronous_1 | 1.1411 | 0.9884 | 0.9179 | 0.5703 | 0.3229 | 0.2665 | 0.1722 | 0.1824 | 0.0609 | 0.0058 | 0.0056 | 0.0032 |
| 图像序列 | YSG-SLAM(S) | YSG-SLAM(G) | YSG-SLAM(S+G) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0058 | 0.0042 | 0.0046 | 0.0033 | 0.0059 | 0.0052 | 0.0046 | 0.0028 | 0.0056 | 0.0048 | 0.0042 | 0.0029 |
| fr3_w_half | 0.0186 | 0.0163 | 0.0149 | 0.0089 | 0.0547 | 0.0440 | 0.0376 | 0.0392 | 0.0185 | 0.0163 | 0.0149 | 0.0087 |
| fr3_w_rpy | 0.0513 | 0.0400 | 0.0314 | 0.0320 | 0.0358 | 0.0322 | 0.0306 | 0.0155 | 0.0264 | 0.0218 | 0.0186 | 0.0148 |
| fr3_w_xyz | 0.0139 | 0.0116 | 0.0105 | 0.0076 | 0.1326 | 0.1222 | 0.1038 | 0.0620 | 0.0133 | 0.0112 | 0.0099 | 0.0071 |
表9 绝对轨迹误差消融实验
Table 9 Ablation experiment of absolute trajectory error
| 图像序列 | YSG-SLAM(S) | YSG-SLAM(G) | YSG-SLAM(S+G) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | 均方根 | 平均值 | 中位数 | 标准差 | |
| fr3_s_static | 0.0058 | 0.0042 | 0.0046 | 0.0033 | 0.0059 | 0.0052 | 0.0046 | 0.0028 | 0.0056 | 0.0048 | 0.0042 | 0.0029 |
| fr3_w_half | 0.0186 | 0.0163 | 0.0149 | 0.0089 | 0.0547 | 0.0440 | 0.0376 | 0.0392 | 0.0185 | 0.0163 | 0.0149 | 0.0087 |
| fr3_w_rpy | 0.0513 | 0.0400 | 0.0314 | 0.0320 | 0.0358 | 0.0322 | 0.0306 | 0.0155 | 0.0264 | 0.0218 | 0.0186 | 0.0148 |
| fr3_w_xyz | 0.0139 | 0.0116 | 0.0105 | 0.0076 | 0.1326 | 0.1222 | 0.1038 | 0.0620 | 0.0133 | 0.0112 | 0.0099 | 0.0071 |
| SLAM系统 | 平均每帧 处理时间/ms | 硬件平台 |
|---|---|---|
| ORB-SLAM2 | 30.04 | AMD Ryzen 7 4800H,Nvidia GTX 1650 |
| YSG-SLAM(本文系统) | 48.09 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| RDS-SLAM | 57.50 | Nvidia RTX 2080Ti GPU |
| RDS-SLAM(本地环境) | 54.78 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| DS-SLAM | 59.40 | Intel i7 CPU,P4000 GPU |
| DS-SLAM(本地环境) | 56.32 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| YOLACT based SLAM | 58.80 | i7-9700K CPU,Nvidia RTX 2080,48GB RAM |
| YOLACT based SLAM (本地环境) | 55.48 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| SG-SLAM | 39.51 | AMD Ryzen 7 4800H,Nvidia GTX 1650 |
| AHY-SLAM | 71.78 | Intel Core i5-4228U CPU |
| DynaSLAM | 192.00 | Nvidia Tesla M40 GPU |
表10 与同类型算法的实时性对比
Table 10 Real-time comparison of similar algorithms
| SLAM系统 | 平均每帧 处理时间/ms | 硬件平台 |
|---|---|---|
| ORB-SLAM2 | 30.04 | AMD Ryzen 7 4800H,Nvidia GTX 1650 |
| YSG-SLAM(本文系统) | 48.09 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| RDS-SLAM | 57.50 | Nvidia RTX 2080Ti GPU |
| RDS-SLAM(本地环境) | 54.78 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| DS-SLAM | 59.40 | Intel i7 CPU,P4000 GPU |
| DS-SLAM(本地环境) | 56.32 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| YOLACT based SLAM | 58.80 | i7-9700K CPU,Nvidia RTX 2080,48GB RAM |
| YOLACT based SLAM (本地环境) | 55.48 | Intel Core i5-12400F CPU,Nvidia RTX 3060 |
| SG-SLAM | 39.51 | AMD Ryzen 7 4800H,Nvidia GTX 1650 |
| AHY-SLAM | 71.78 | Intel Core i5-4228U CPU |
| DynaSLAM | 192.00 | Nvidia Tesla M40 GPU |
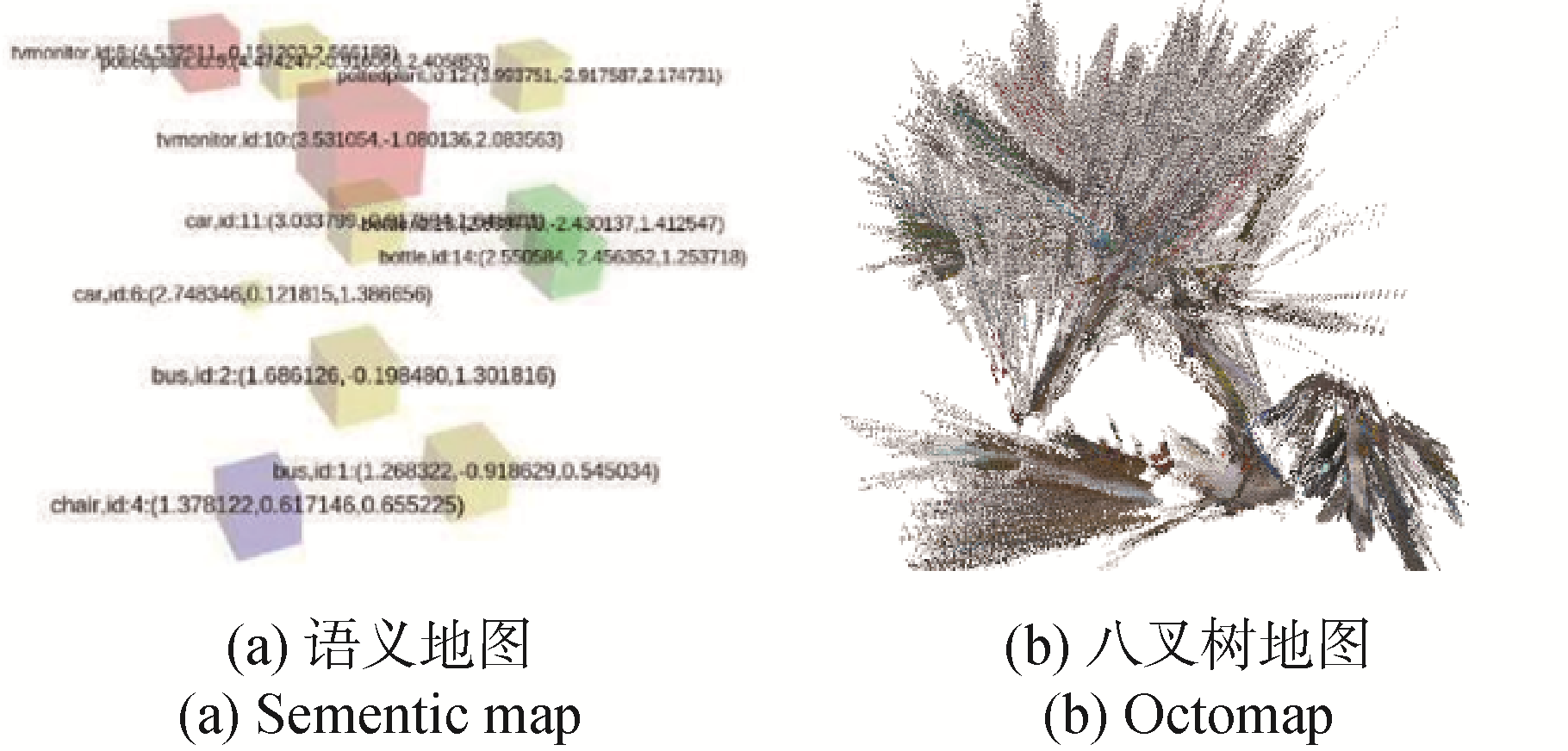
图7 OpenLORIS-Scene数据集Market 1-3序列上的建图结果
Fig.7 Mapping results on Market 1-3 sequence of OpenLORIS-Scene dataset
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
张福斌, 张炳烁, 杨玉帅. 基于单目/IMU/里程计融合的 SLAM 算法[J]. 兵工学报, 2022, 43(11):2810-2818.
|
|
doi: 10.12382/bgxb.2022.0240 |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
孙浩, 王朋. 一种基于区域划分的改进ORB算法[J]. 北京航空航天大学学报, 2020, 46(9):1763-1769.
|
|
|
|
| [27] |
|
| [28] |
|
| [1] | 赵薇, 王峰, 马星宇, 翟伟光, 孟鹏帅. 基于动态区域剔除与稠密地图构建的视觉SLAM算法[J]. 兵工学报, 2025, 46(3): 240217-. |
| [2] | 刘锟龙, 王虎, 刘小强, 牛帅旭, 黄奕, 付琦, 赵涛. 基于光照感知和特征增强的可见光-热红外图像语义分割[J]. 兵工学报, 2024, 45(S1): 219-230. |
| [3] | 孙浩, 黎海青, 梁彦, 马超雄, 吴翰. 基于知识辅助深度强化学习的巡飞弹组动态突防决策[J]. 兵工学报, 2024, 45(9): 3161-3176. |
| [4] | 岳胜哲, 王正杰. 基于实例分割与光流的动态环境SLAM[J]. 兵工学报, 2024, 45(1): 156-165. |
| [5] | 王强, 吴乐天, 李红, 王勇, 王欢, 杨万扣. 基于双支网络协作的红外弱小目标检测[J]. 兵工学报, 2023, 44(10): 3165-3176. |
| [6] | 刘月, 刘铁林, 姜相争, 韩月明. 基于径向基函数和自组织映射的导弹控制系统健康状态评估[J]. 兵工学报, 2022, 43(4): 931-939. |
| [7] | 周梦如, 陈慧岩, 熊光明, 关海杰, 刘庆霄. 越野环境下无人履带平台的道路可通行性分析[J]. 兵工学报, 2022, 43(10): 2485-2496. |
| [8] | 王成, 吴岩, 杨廷飞. 利用改进单分类支持向量机提升舰船尾流目标的检测准确率[J]. 兵工学报, 2020, 41(9): 1887-1893. |
| [9] | 黄莎玲, 朱鸿志, 程祥利, 谢玉斌. 自适应阈值侵彻引信层目标识别算法[J]. 兵工学报, 2020, 41(9): 1762-1771. |
| [10] | 朱航, 张淑宁, 赵惠昌. 单通道多分量伪码复合线性调频信号分离及参数估计[J]. 兵工学报, 2014, 35(9): 1363-1374. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4