
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (5): 240404-.doi: 10.12382/bgxb.2024.0404
野汶博1,2,3, 方洋旺1,2,3,*( ), 洪瑞阳1,2,3, 胡祁东4
), 洪瑞阳1,2,3, 胡祁东4
收稿日期:2024-05-23
上线日期:2025-05-07
通讯作者:
基金资助:
YE Wenbo1,2,3, FANG Yangwang1,2,3,*(), HONG Ruiyang1,2,3, HU Qidong4
Received:2024-05-23
Online:2025-05-07
摘要:
为保证无人水下航行器在执行海岸线巡逻、大型船只避碰以及穿越密集岛礁等复杂任务时的安全性,提出一种基于控制障碍函数的椭圆模型障碍物避障方法。在对障碍物进行椭圆形建模的基础上设计包含艏向角约束的控制障碍函数,构建带有约束条件的二次规划问题,通过与无障碍环境下的制导律相结合,得到闭式解形式的避障制导律。仿真结果验证了所提方法的有效性,可全局上满足安全性和稳定性要求,对于无人水下航行器在复杂海洋环境中的安全航行具有实际应用价值。
中图分类号:
野汶博, 方洋旺, 洪瑞阳, 胡祁东. 基于控制障碍函数的欠驱动无人水下航行器椭圆障碍物避障制导[J]. 兵工学报, 2025, 46(5): 240404-.
YE Wenbo, FANG Yangwang, HONG Ruiyang, HU Qidong. Elliptical Obstacle Avoidance Guidance for Underactuated Unmanned Underwater Vehicle Based on Control Barrier Function[J]. Acta Armamentarii, 2025, 46(5): 240404-.

图1 障碍物椭圆形建模示意图
Fig.1 Elliptical modeling of obstacles
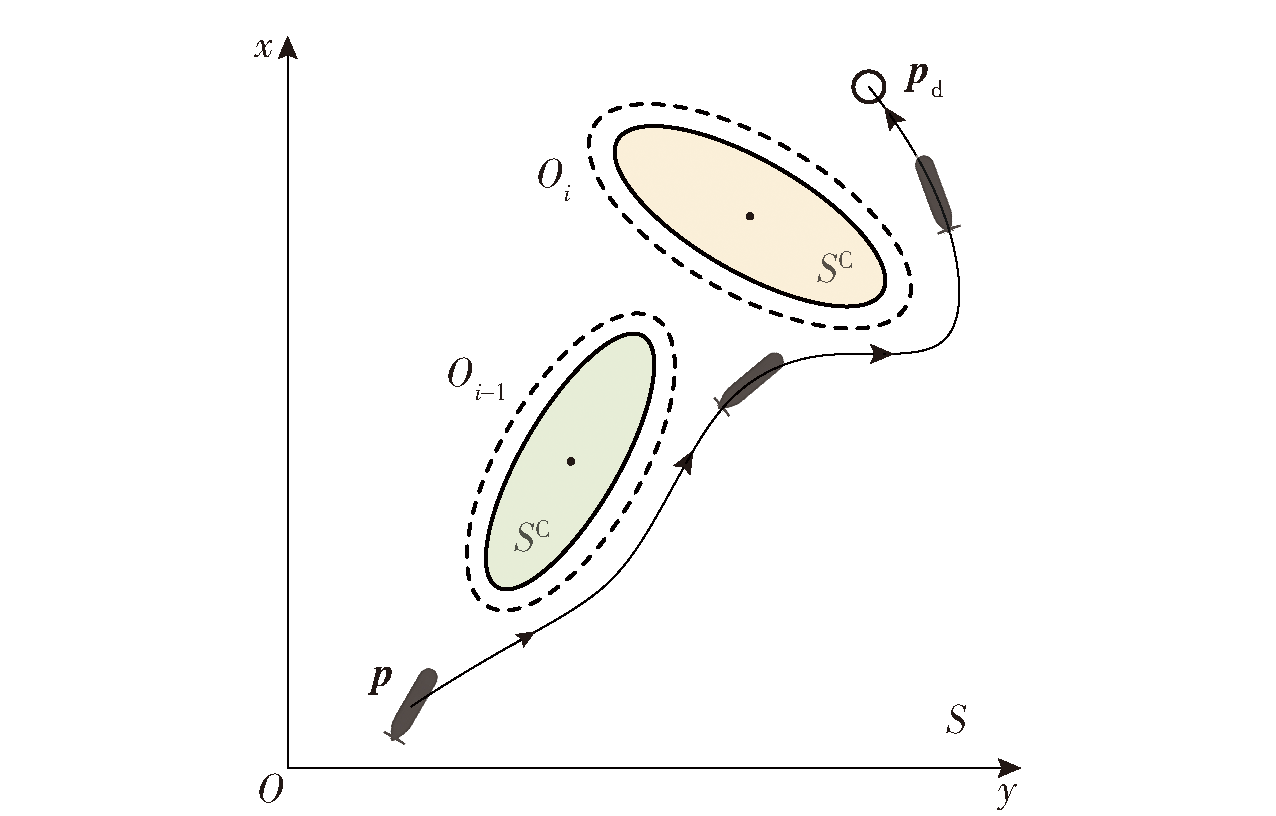
图2 制导目标示意图
Fig.2 Guidance objective
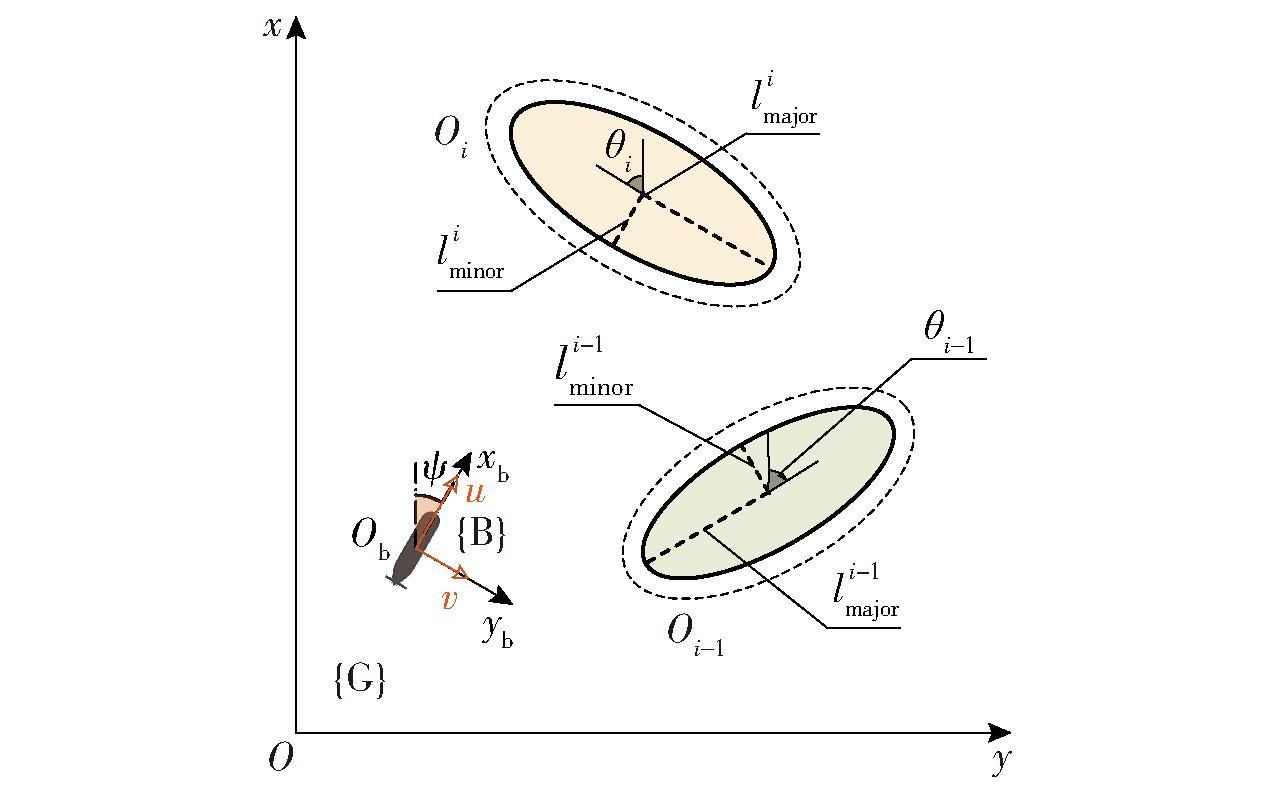
图3 坐标系及障碍物椭圆模型
Fig.3 Coordinate system and elliptical modeling of obstacles
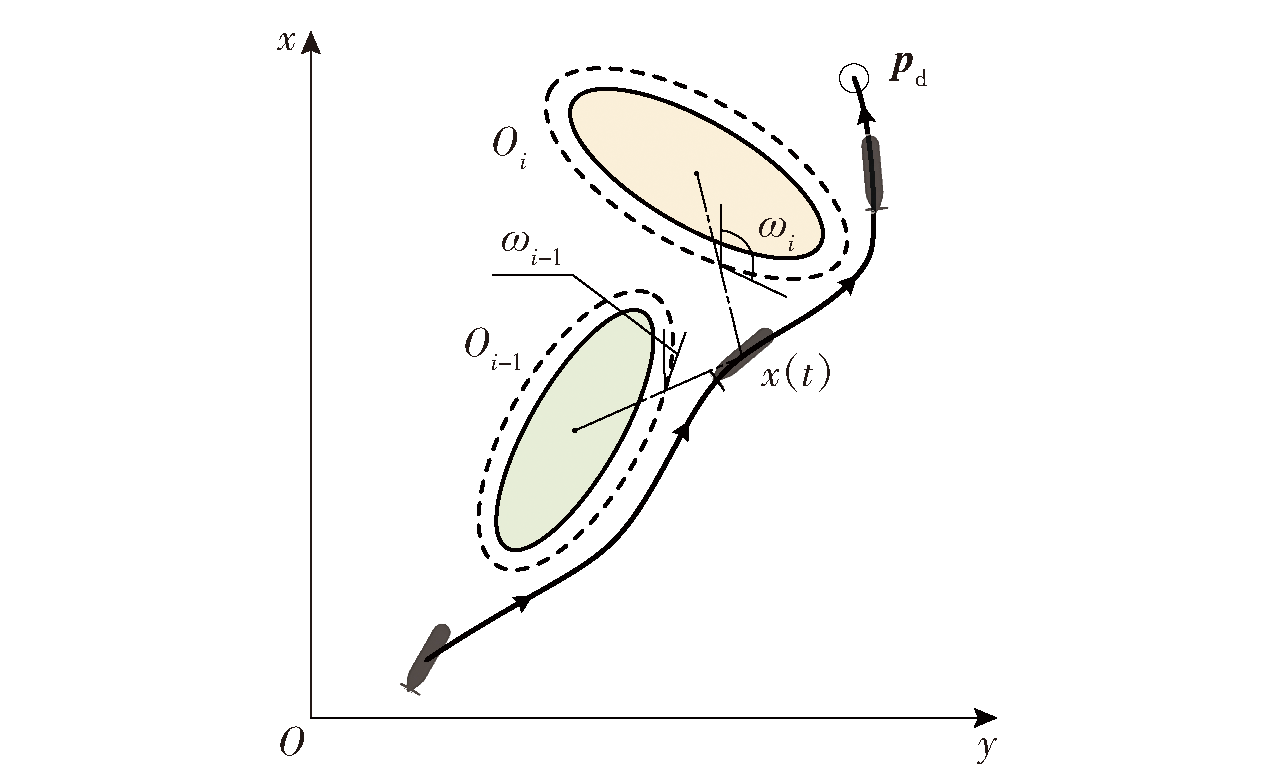
图4 t时刻切线角示意图
Fig.4 Tangent angle at time t

图5 避障轨迹对比
Fig.5 Comparison of obstacle avoidance trajectories

图6 不同参数的制导输入对比
Fig.6 Comparison of guidance inputs with different parameters
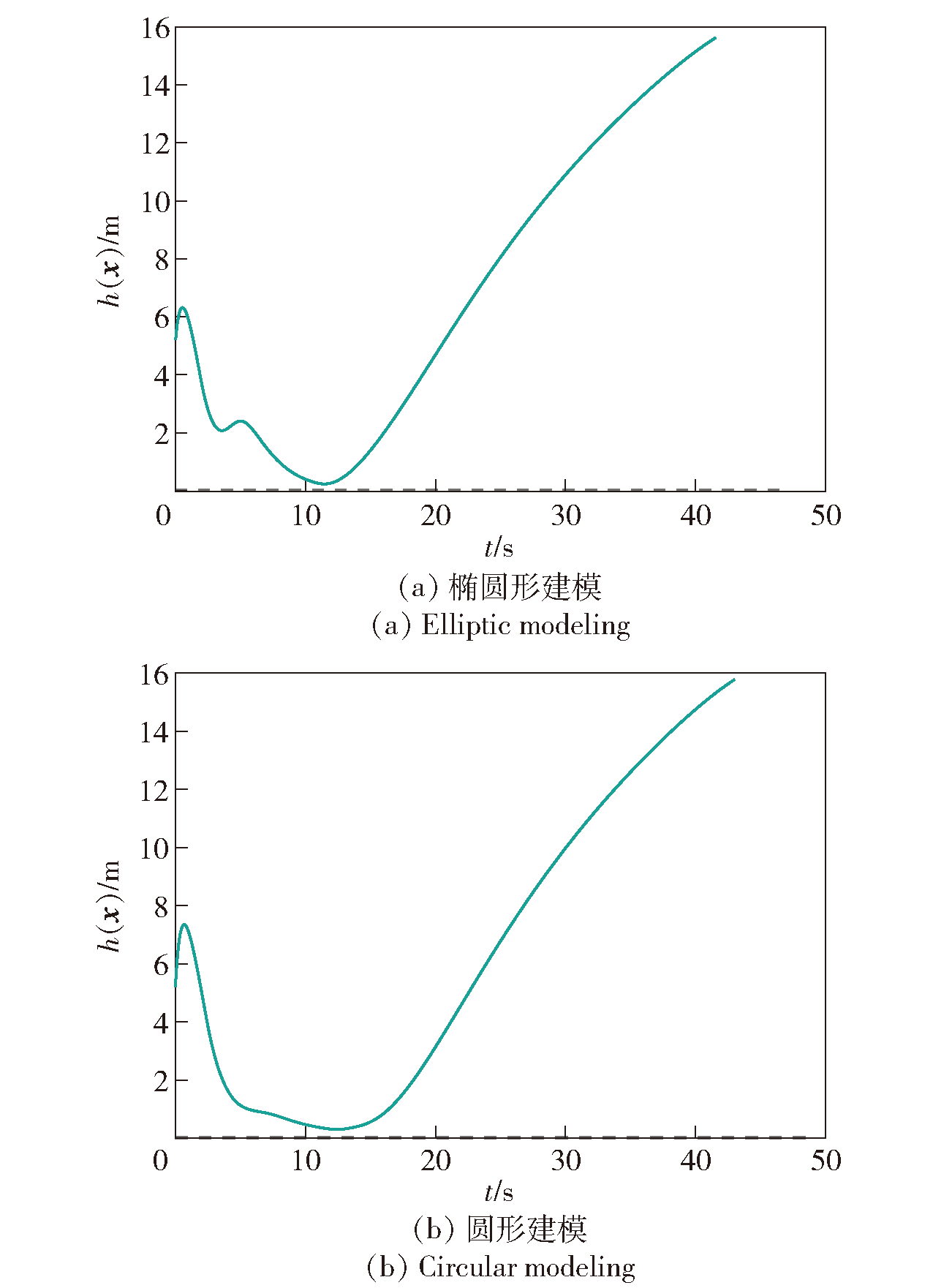
图7 避障约束h(x)对比
Fig.7 Comparison of obstacle avoidance constraints h(x)

图8 避障轨迹对比
Fig.8 Comparison of obstacle avoidance trajectories
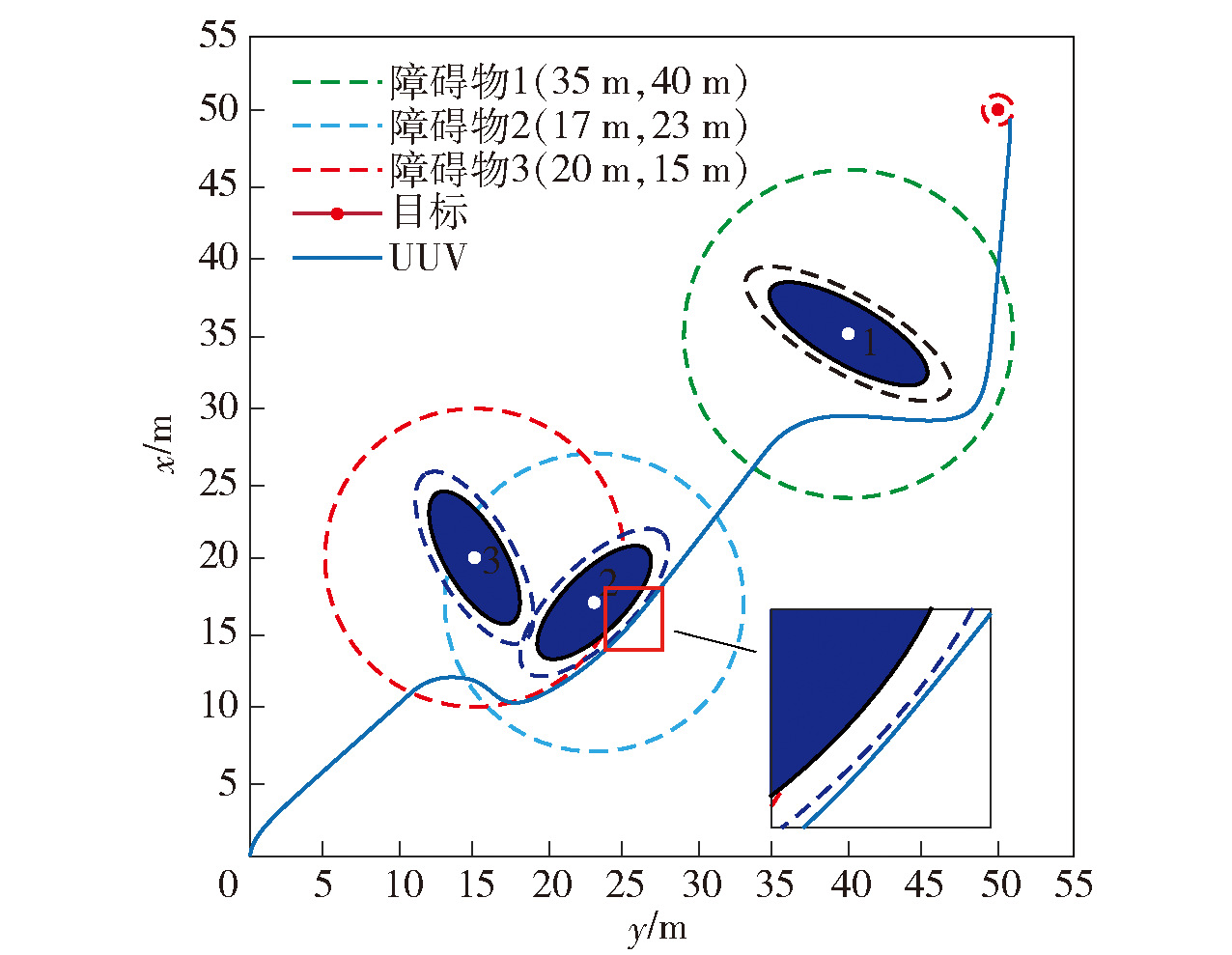
图9 多障碍物避障轨迹
Fig.9 Obstacle avoidance trajectory for multiple obstacles

图10 多障碍物避障制导输入
Fig.10 Guidance input for multiple obstacles

图11 多障碍物避障约束
Fig.11 Obstacle avoidance constraints for multiple obstacles

图12 不同参数的避障轨迹
Fig.12 Obstacle avoidance trajectories with different parameters

图13 不同参数的避障制导输入
Fig.13 Guidance inputs with different parameters

图14 不同参数的避障约束h(x)
Fig.14 Obstacle avoidance constraints with different parameters
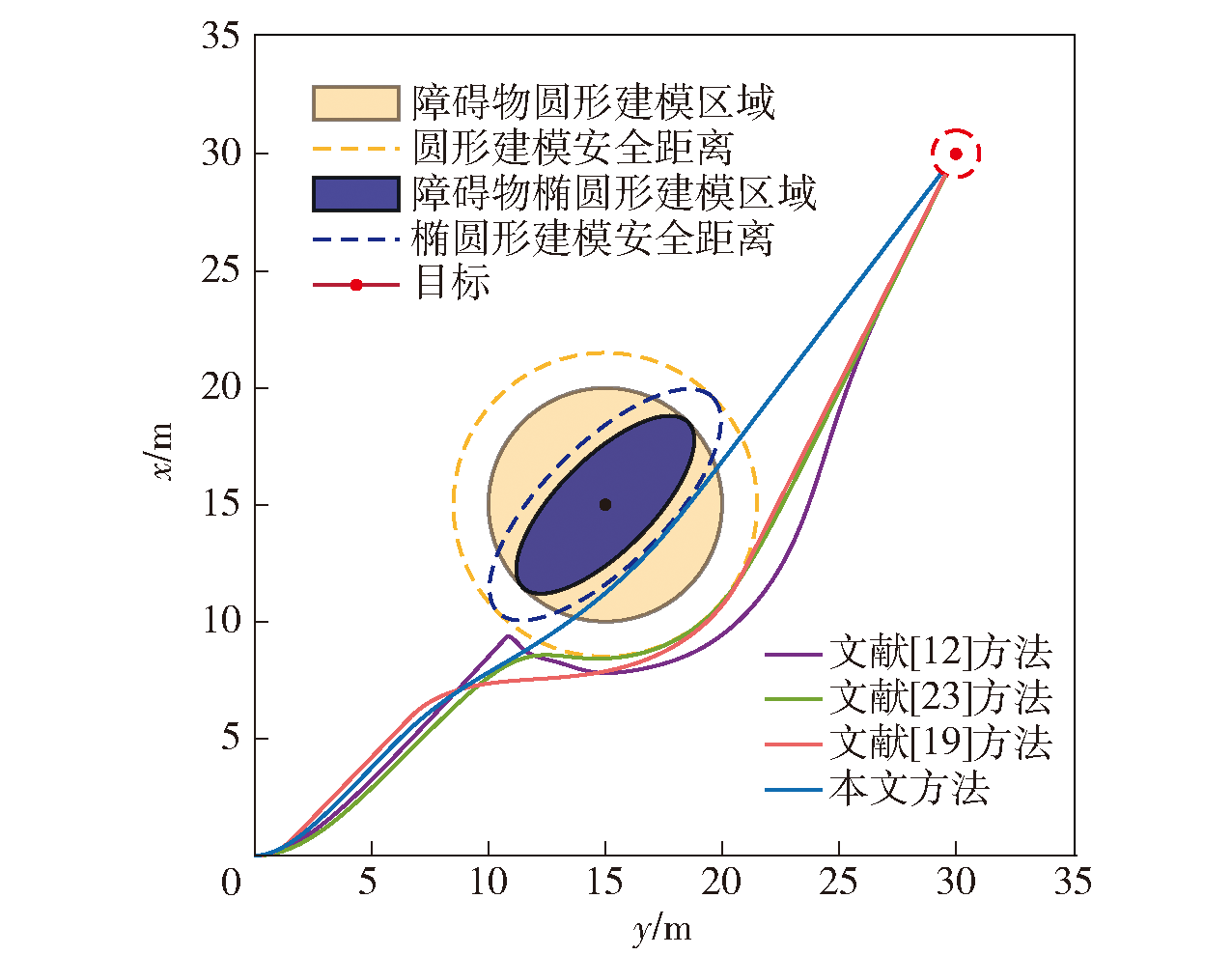
图15 不同避障方法的轨迹对比
Fig.15 Comparison of trajectories for different obstacle avoidance methods

图16 不同避障方法的制导输入u对比
Fig.16 Comparison of guidance inputs u for different obstacle avoidance methods

图17 不同避障方法的制导输入r对比
Fig.17 Comparison of guidance inputs r for different obstacle avoidance methods
| [1] |
doi: 10.1016/j.oceaneng.2019.04.011 |
| [2] |
邱志明, 孟祥尧, 马焱, 等. 海上无人系统发展及关键技术研究[J]. 中国工程科学, 2023, 25(3): 74-83.
doi: 10.15302/J-SSCAE-2023.03.005 |
|
doi: 10.15302/J-SSCAE-2023.03.005 |
|
| [3] |
徐同乐, 刘方, 肖玉杰, 等. 国外无人反水雷装备及技术发展[J]. 兵工学报, 2022, 43(增刊2): 64-70.
|
|
doi: 10.12382/bgxb.2022.B019 |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
郭银景, 刘琦, 鲍建康, 等. 基于人工势场法的AUV避障算法研究综述[J]. 计算机工程与应用, 2020, 56(4): 16-23.
doi: 10.3778/j.issn.1002-8331.1910-0464 |
|
doi: 10.3778/j.issn.1002-8331.1910-0464 |
|
| [11] |
潘无为, 姜大鹏, 庞永杰, 等. 人工势场和虚拟结构相结合的多水下机器人编队控制[J]. 兵工学报, 2017, 38(2): 326-334.
doi: 10.3969/j.issn.1000-1093.2017.02.017 |
|
|
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
徐彦平. 基于控制障碍函数的无人艇集群制导及实验验证[D]. 大连: 大连海事大学, 2023.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
高剑. 无人水下航行器自适应非线性控制技术[M]. 西安: 西北工业大学出版社, 2016.
|
|
|
|
| [32] |
|
| [33] |
杜宏宝, 王正杰, 唐礼喜, 等. 基于控制障碍函数的飞行器避障与制导控制[J]. 兵工学报, 2023, 44(9): 2814-2823.
doi: 10.12382/bgxb.2022.1002 |
|
doi: 10.12382/bgxb.2022.1002 |
| [1] | 何洋, 李刚. 基于速度障碍模型的智能汽车轨迹规划控制方法研究[J]. 兵工学报, 2025, 46(4): 240058-. |
| [2] | 吴俊岐, 吴碧, 邓宏彬, 周智千. 基于动态参数扩展控制障碍函数的无人机时变编队最优跟踪控制[J]. 兵工学报, 2025, 46(4): 240260-. |
| [3] | 先苏杰, 王康, 曾鑫, 宋杰, 吴志林. 基于深度强化学习的落角和视场角约束制导律[J]. 兵工学报, 2025, 46(4): 240435-. |
| [4] | 潘云伟, 李敏, 曾祥光, 黄傲, 张加衡, 任文哲, 彭倍. 基于人工势场和改进强化学习的自主式水下潜航器避障和航迹规划[J]. 兵工学报, 2025, 46(4): 240300-. |
| [5] | 李雅轩, 刘新福. 基于精确凸松弛的固定翼无人机实时轨迹规划[J]. 兵工学报, 2025, 46(3): 240362-. |
| [6] | 李诗颖, 丁应和, 孙海文, 许正, 李烨, 唐恩博. 规模化无人集群共识模型与协同控制方法[J]. 兵工学报, 2024, 45(S2): 113-122. |
| [7] | 胡砚洋, 何凡, 白成超. 高超声速飞行器末制导段协同避障决策方法[J]. 兵工学报, 2024, 45(9): 3147-3160. |
| [8] | 吴浩, 李东光, 王泳安. 反舰导弹大前置角下三维剩余飞行时间估计方法[J]. 兵工学报, 2024, 45(5): 1449-1459. |
| [9] | 任宏斌, 孙纪禹, 陈志铿, 赵玉壮, 杨林. 基于线性时变模型预测控制的实时抗噪高速车辆运动控制[J]. 兵工学报, 2024, 45(12): 4311-4322. |
| [10] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [11] | 方秋雨, 张蕴霖, 麻壮壮, 邵晋梁. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(S2): 90-102. |
| [12] | 赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696. |
| [13] | 杜宏宝, 王正杰, 唐礼喜, 张小宁. 基于控制障碍函数的飞行器避障与制导控制[J]. 兵工学报, 2023, 44(9): 2814-2823. |
| [14] | 周蒙, 钱惟贤, 任侃. 多约束超螺旋滑模变结构制导律[J]. 兵工学报, 2023, 44(3): 799-805. |
| [15] | 周孝添, 任宏斌, 苏波, 齐志权, 汪洋. 基于微分平坦的分层轨迹规划算法[J]. 兵工学报, 2023, 44(2): 394-405. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4