
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (9): 2685-2696.doi: 10.12382/bgxb.2022.0525
所属专题: 智能系统与装备技术
赵军民1,2, 何浩哲2,*( ), 王少奇2, 聂聪2, 焦迎杰2
), 王少奇2, 聂聪2, 焦迎杰2
收稿日期:2022-06-13
上线日期:2022-09-27
通讯作者:
ZHAO Junmin1,2, HE Haozhe2,*(), WANG Shaoqi2, NIE Cong2, JIAO Yingjie2
Received:2022-06-13
Online:2022-09-27
摘要:
针对多无人机在密集障碍环境中协同执行地面目标跟踪任务时存在避障能力不足的问题,提出一种基于零空间方法的多无人机目标跟踪与避障联合航迹规划算法。利用Lyapunov导引向量场得到协同对地面目标进行Standoff跟踪时的无人机目标跟踪速度指令,构建障碍物模型和避障人工势场函数,利用人工势场方法得到无人机避障速度指令;基于零空间方法,将避障任务设定为高优先级任务,通过将目标跟踪速度指令向避障任务零空间投影后再与避障速度指令相加的联合航迹规划方法,获取综合后的无人机速度指令。通过仿真分析验证联合航迹规划方法的有效性。仿真结果表明,联合航迹规划方法能够在密集障碍物存在的复杂环境中实时规划有效航迹,保证多无人机避开密集障碍物,持续跟踪目标,并且多无人机具有良好的协同性。
中图分类号:
赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696.
ZHAO Junmin, HE Haozhe, WANG Shaoqi, NIE Cong, JIAO Yingjie. Joint Trajectory Planning for Multiple UAVs Target Tracking and Obstacle Avoidance in a Complicated Environment[J]. Acta Armamentarii, 2023, 44(9): 2685-2696.
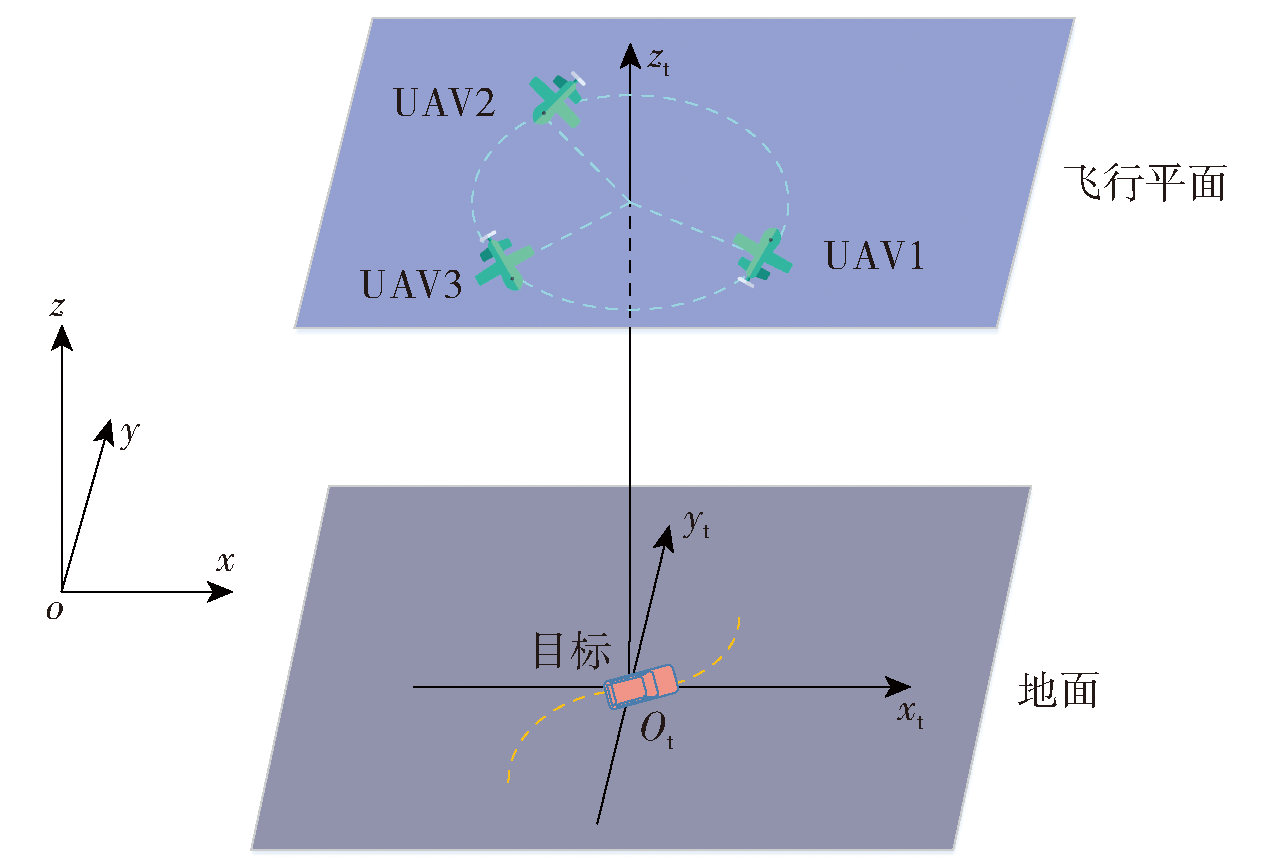
图1 多UAV Standoff跟踪示意图
Fig.1 Schematic diagram of standoff tracking of multiple UAVs
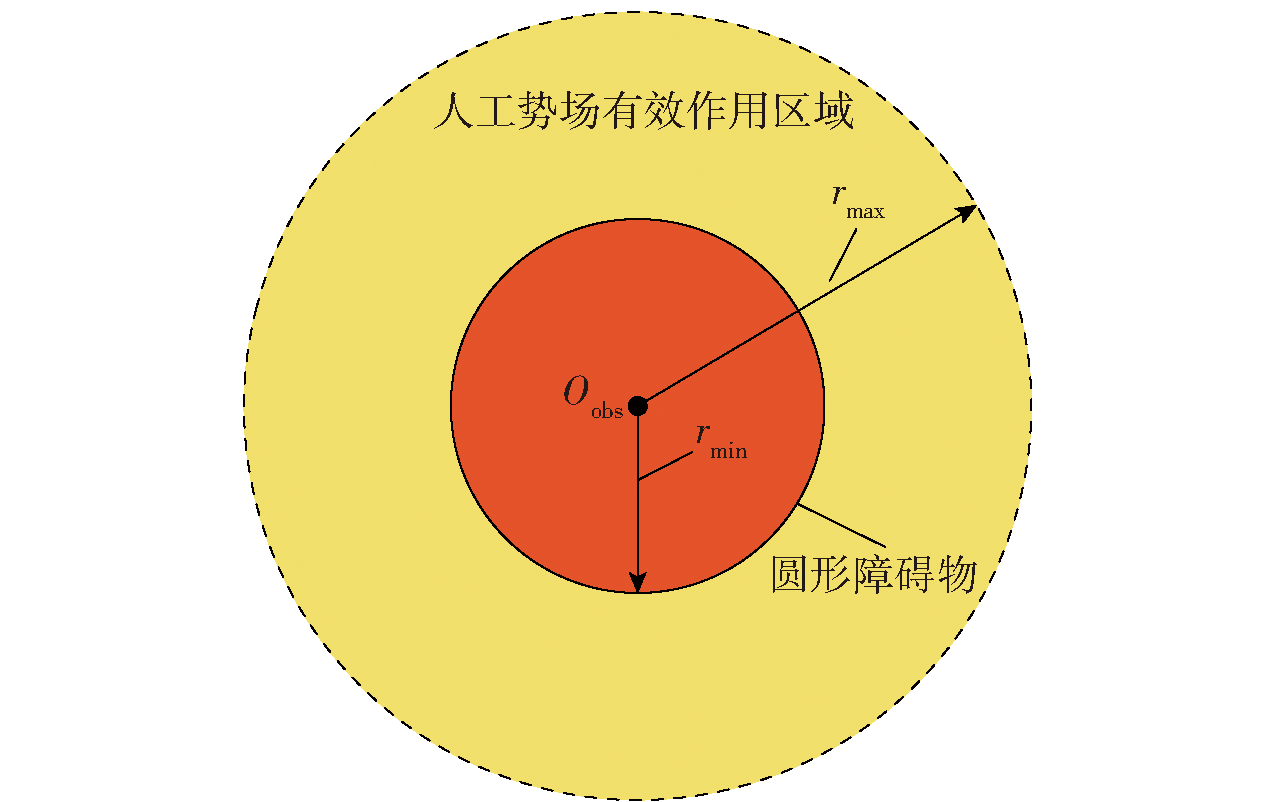
图2 障碍物及人工势场示意图
Fig.2 Schematic diagram of an obstacle and its artificial potential
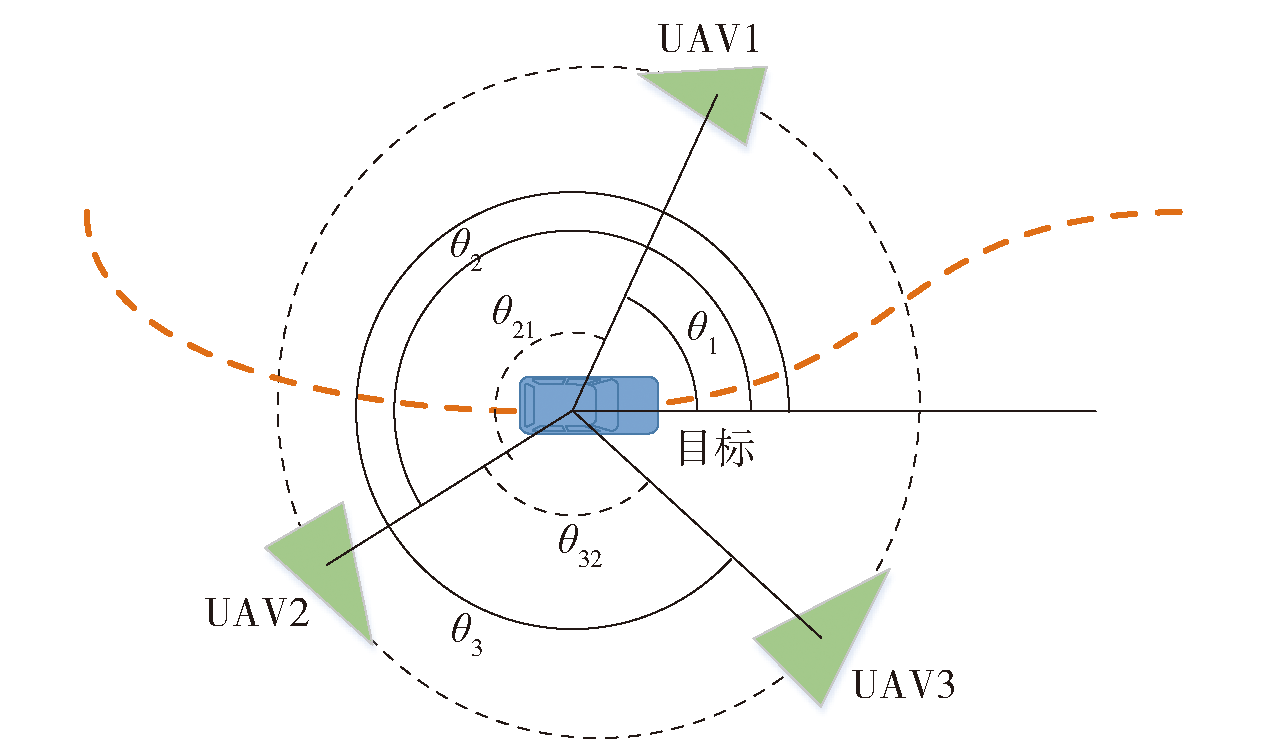
图3 UAV在Standoff圆上的相位关系
Fig.3 Phase relationship between UAVs on a standoff circle
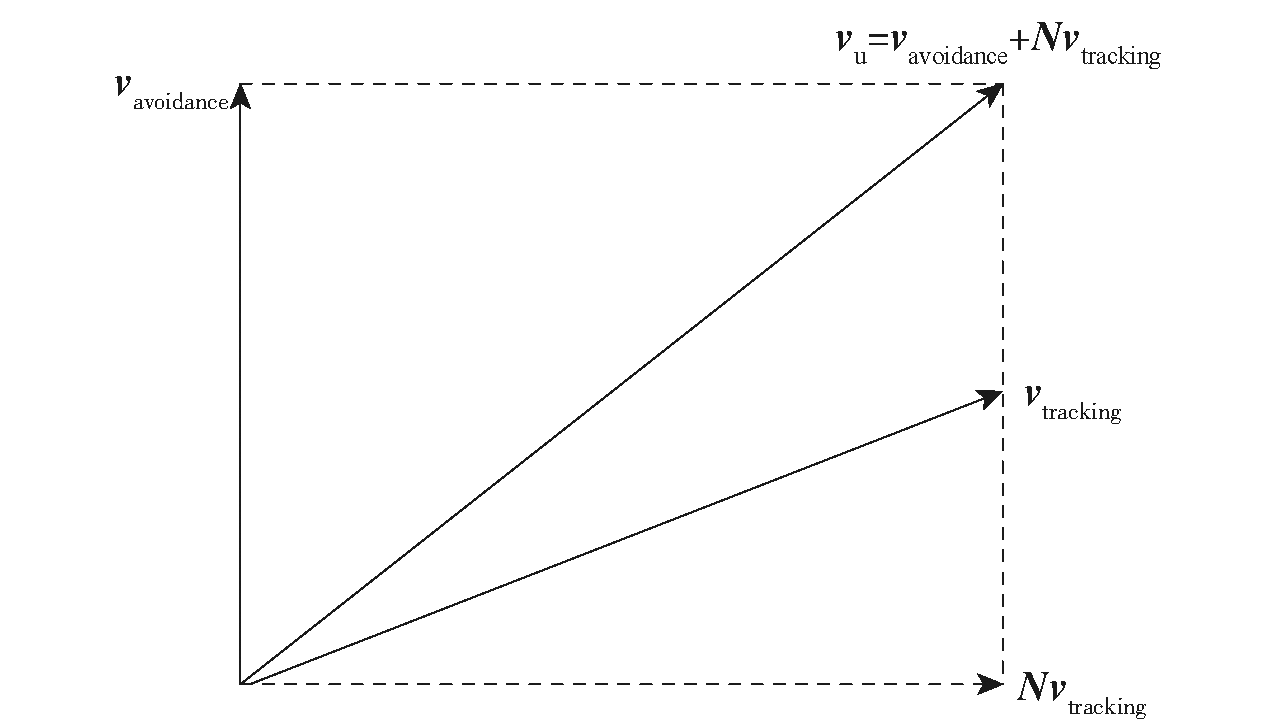
图4 基于零空间方法的联合航迹规划示意图
Fig.4 Schematic diagram of null-space-based joint trajectory planning
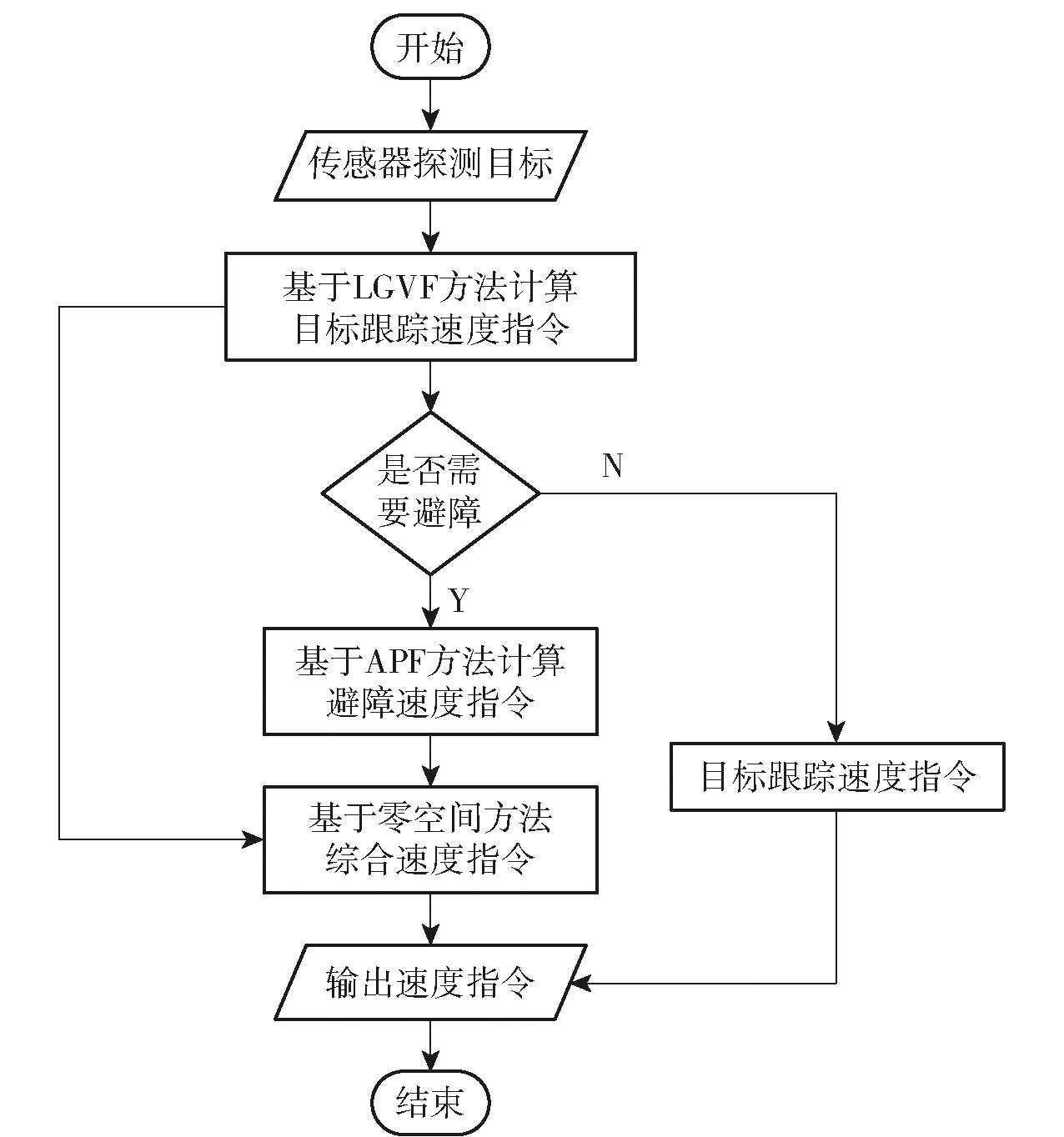
图5 UAV航迹规划流程示意图
Fig.5 Schematic diagram of UAV trajectory planning process
| UAV编号 | UAV1 | UAV2 | UAV3 |
|---|---|---|---|
| 初始位置/m | (750,800) | (700,700) | (600,600) |
表1 UAV初始位置
Table 1 Initial positions of UAVs
| UAV编号 | UAV1 | UAV2 | UAV3 |
|---|---|---|---|
| 初始位置/m | (750,800) | (700,700) | (600,600) |
| 参数 | R/m | v0/(m·s-1) | k1 | k3 |
|---|---|---|---|---|
| 数值 | 300 | 20 | 1/75π | 1/75π |
表2 LGVF方法各参数取值
Table 2 LGVF method parameters
| 参数 | R/m | v0/(m·s-1) | k1 | k3 |
|---|---|---|---|---|
| 数值 | 300 | 20 | 1/75π | 1/75π |
| 障碍物编号 | 障碍物1 | 障碍物2 | 障碍物3 |
|---|---|---|---|
| 位置/m | (330,550) | (250,270) | (50,400) |
表3 障碍物位置
Table 3 Positions of obstacles
| 障碍物编号 | 障碍物1 | 障碍物2 | 障碍物3 |
|---|---|---|---|
| 位置/m | (330,550) | (250,270) | (50,400) |
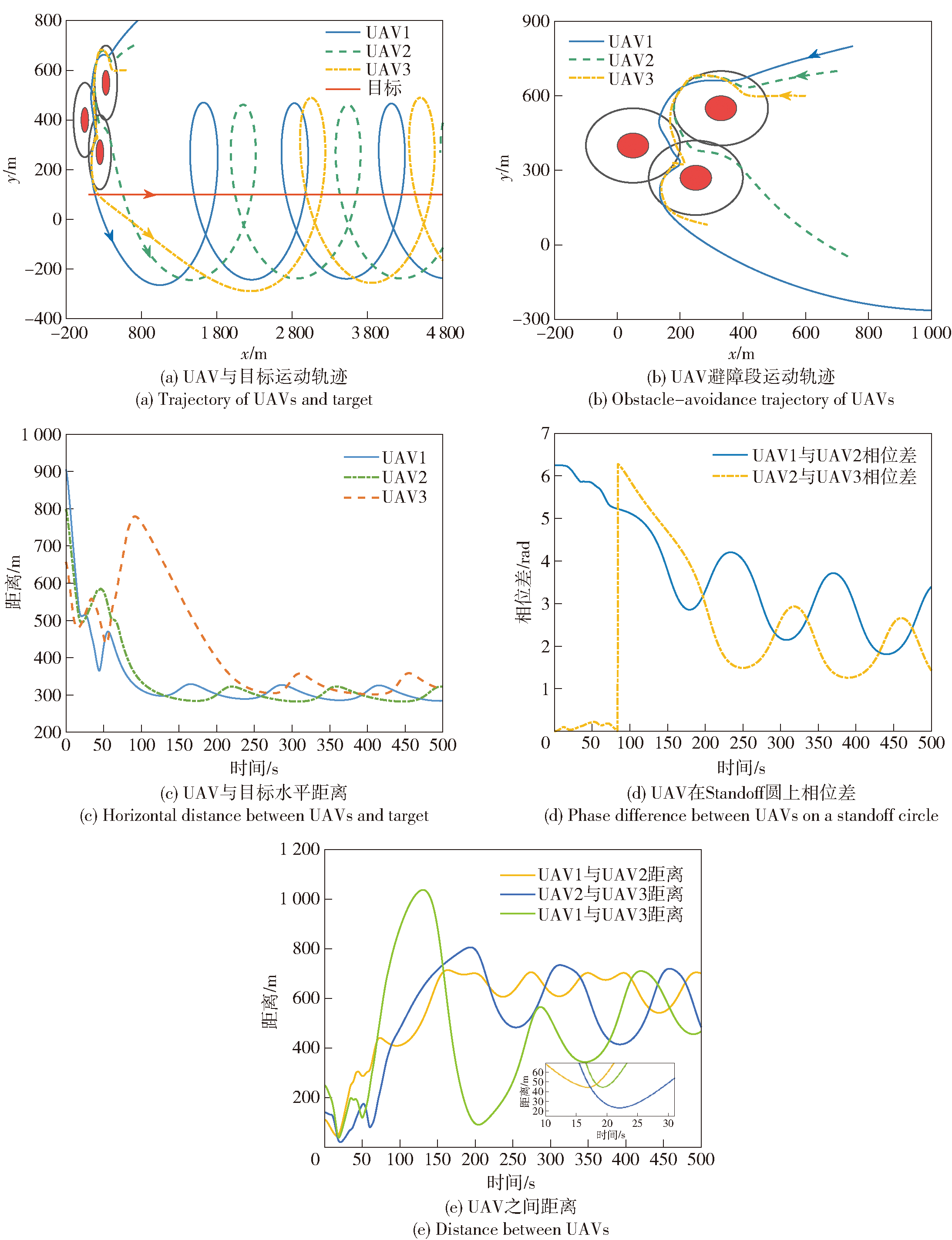
图6 协同跟踪非机动运动目标的仿真结果
Fig.6 Simulation results of cooperative tracking of a non-maneuvering target
| 时间/s | 运动形式 | 速度/ (m·s-1) | 角速度/ ((°) s-1) |
|---|---|---|---|
| 0~260 | 沿x轴正向做匀速直线运动 | 10 | 0 |
| 260~280 | 沿逆时针方向做匀速转弯运动 | 10 | 4.5 |
| 280~330 | 沿y轴正向做匀速直线运动 | 10 | 0 |
| 330~350 | 沿顺时针方向做匀速转弯运动 | 10 | -4.5 |
| 350~800 | 沿x轴正向做匀速直线运动 | 10 | 0 |
表4 机动目标运动过程
Table 4 Motion process of a maneuvering target
| 时间/s | 运动形式 | 速度/ (m·s-1) | 角速度/ ((°) s-1) |
|---|---|---|---|
| 0~260 | 沿x轴正向做匀速直线运动 | 10 | 0 |
| 260~280 | 沿逆时针方向做匀速转弯运动 | 10 | 4.5 |
| 280~330 | 沿y轴正向做匀速直线运动 | 10 | 0 |
| 330~350 | 沿顺时针方向做匀速转弯运动 | 10 | -4.5 |
| 350~800 | 沿x轴正向做匀速直线运动 | 10 | 0 |
| 障碍物编号 | 位置/m | rmin/m | rmax/m |
|---|---|---|---|
| 障碍物4 | (1180,-200) | 50 | 150 |
| 障碍物5 | (1400,-150) | 50 | 150 |
| 障碍物6 | (1630,-90) | 80 | 160 |
| 障碍物7 | (3050, 0) | 80 | 160 |
| 障碍物8 | (3050, 290) | 80 | 160 |
表5 障碍物位置和参数
Table 5 Positions and parameters of other obstacles
| 障碍物编号 | 位置/m | rmin/m | rmax/m |
|---|---|---|---|
| 障碍物4 | (1180,-200) | 50 | 150 |
| 障碍物5 | (1400,-150) | 50 | 150 |
| 障碍物6 | (1630,-90) | 80 | 160 |
| 障碍物7 | (3050, 0) | 80 | 160 |
| 障碍物8 | (3050, 290) | 80 | 160 |
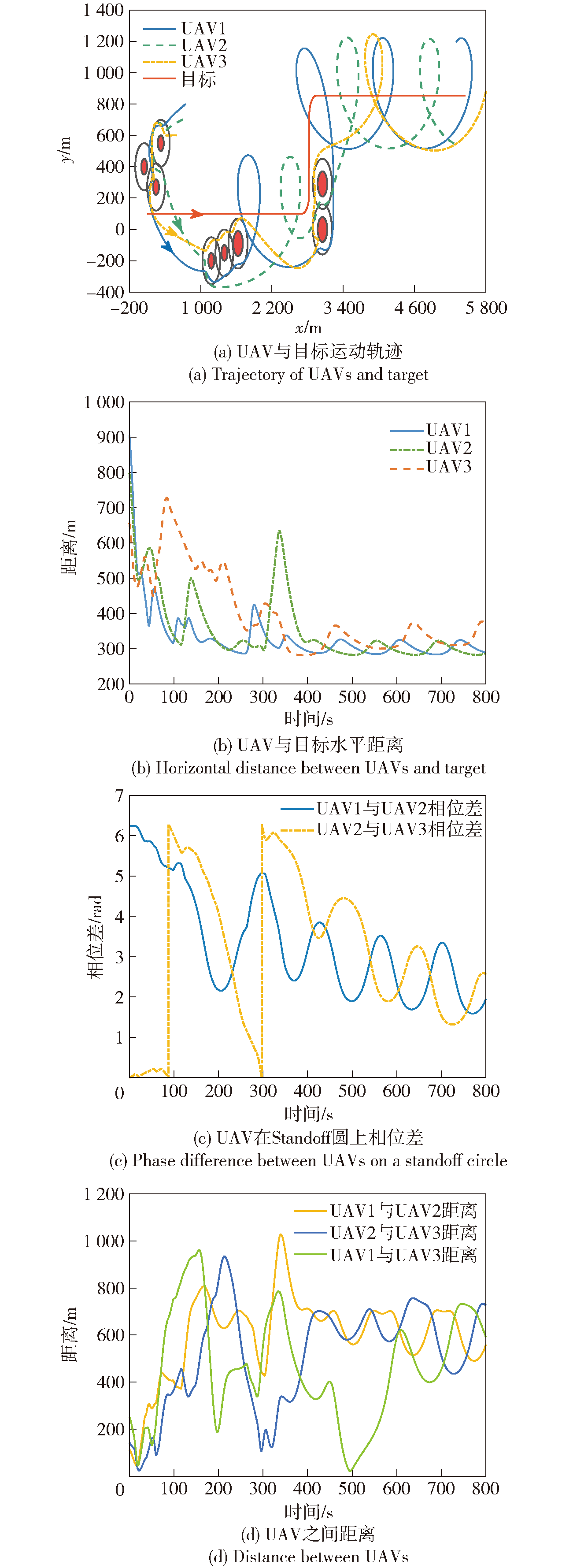
图7 协同跟踪机动运动目标的仿真结果
Fig.7 Simulation results of cooperative tracking of a maneuvering target
| UAV编号 | rmin/m | ||
|---|---|---|---|
| 80 | 100 | 150 | |
| UAV1 | 123.5743 | 126.6565 | 153.7342 |
| UAV2 | 146.1178 | 146.6368 | 156.5215 |
| UAV3 | 93.7131 | 107.9902 | 152.0367 |
表6 不同rmin下各UAV与障碍物7中心的最小距离
Table 6 Minimum distance between each UAV and the center of obstacle 7 with different radius of obstacle 7 m
| UAV编号 | rmin/m | ||
|---|---|---|---|
| 80 | 100 | 150 | |
| UAV1 | 123.5743 | 126.6565 | 153.7342 |
| UAV2 | 146.1178 | 146.6368 | 156.5215 |
| UAV3 | 93.7131 | 107.9902 | 152.0367 |
| UAV编号 | rmin/m | ||
|---|---|---|---|
| 80 | 100 | 150 | |
| UAV1 | 162.0321 | 163.5365 | 170.7342 |
| UAV2 | 118.7405 | 122.8926 | 153.7433 |
| UAV3 | 129.6581 | 133.1933 | 153.5743 |
表7 不同rmin下各UAV与障碍物8中心的最小距离
Table 7 Minimum distance between each UAV and the center of obstacle 8 with different radius of obstacle 8 m
| UAV编号 | rmin/m | ||
|---|---|---|---|
| 80 | 100 | 150 | |
| UAV1 | 162.0321 | 163.5365 | 170.7342 |
| UAV2 | 118.7405 | 122.8926 | 153.7433 |
| UAV3 | 129.6581 | 133.1933 | 153.5743 |
| UAV编号 | rmax/m | ||
|---|---|---|---|
| 160 | 220 | 300 | |
| UAV1 | 125.5743 | 173.6564 | 248.1498 |
| UAV2 | 146.1178 | 184.1363 | 249.3040 |
| UAV3 | 93.7131 | 128.3524 | 203.1966 |
表8 不同rmax下各UAV与障碍物7中心的最小距离
Table 8 Minimum distance between each UAV and the center of obstacle 7 with different APF maximum radius m
| UAV编号 | rmax/m | ||
|---|---|---|---|
| 160 | 220 | 300 | |
| UAV1 | 125.5743 | 173.6564 | 248.1498 |
| UAV2 | 146.1178 | 184.1363 | 249.3040 |
| UAV3 | 93.7131 | 128.3524 | 203.1966 |
| UAV编号 | rmax/m | ||
|---|---|---|---|
| 160 | 220 | 300 | |
| UAV1 | 162.0321 | 224.1401 | 303.2632 |
| UAV2 | 118.7405 | 146.4538 | 230.6955 |
| UAV3 | 129.6581 | 153.9718 | 226.0562 |
表9 不同rmax下各UAV与障碍物8中心的最小距离
Table 9 Minimum distance between each UAV and the center of obstacle 8 with different APF maximum radius m
| UAV编号 | rmax/m | ||
|---|---|---|---|
| 160 | 220 | 300 | |
| UAV1 | 162.0321 | 224.1401 | 303.2632 |
| UAV2 | 118.7405 | 146.4538 | 230.6955 |
| UAV3 | 129.6581 | 153.9718 | 226.0562 |
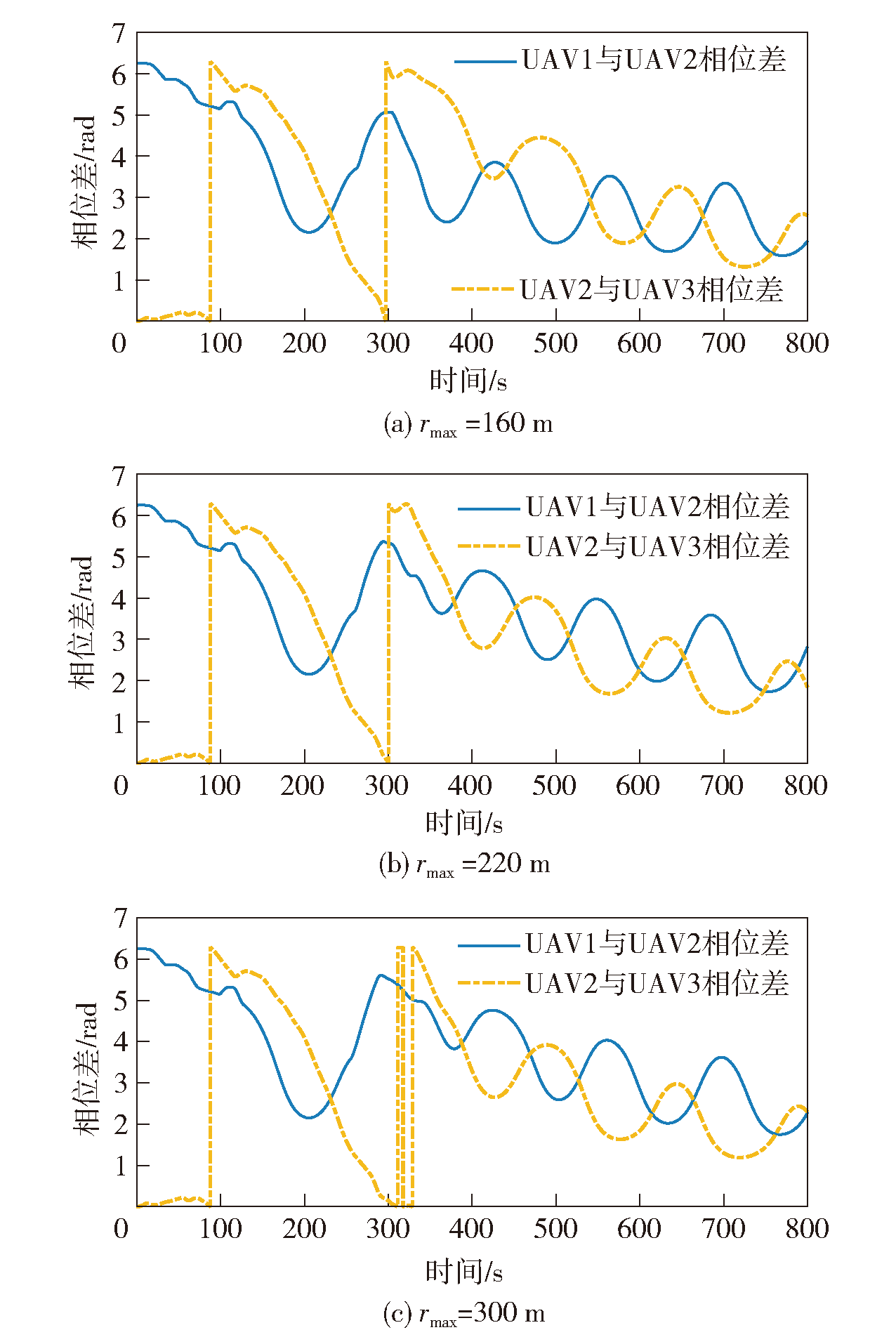
图8 不同rmax下UAV在Standoff圆上相位差
Fig.8 Phase difference between UAVs on a standoff circle under different APF maximum radius

图9 直接相加方法仿真结果
Fig.9 Simulation results using a adding-up method
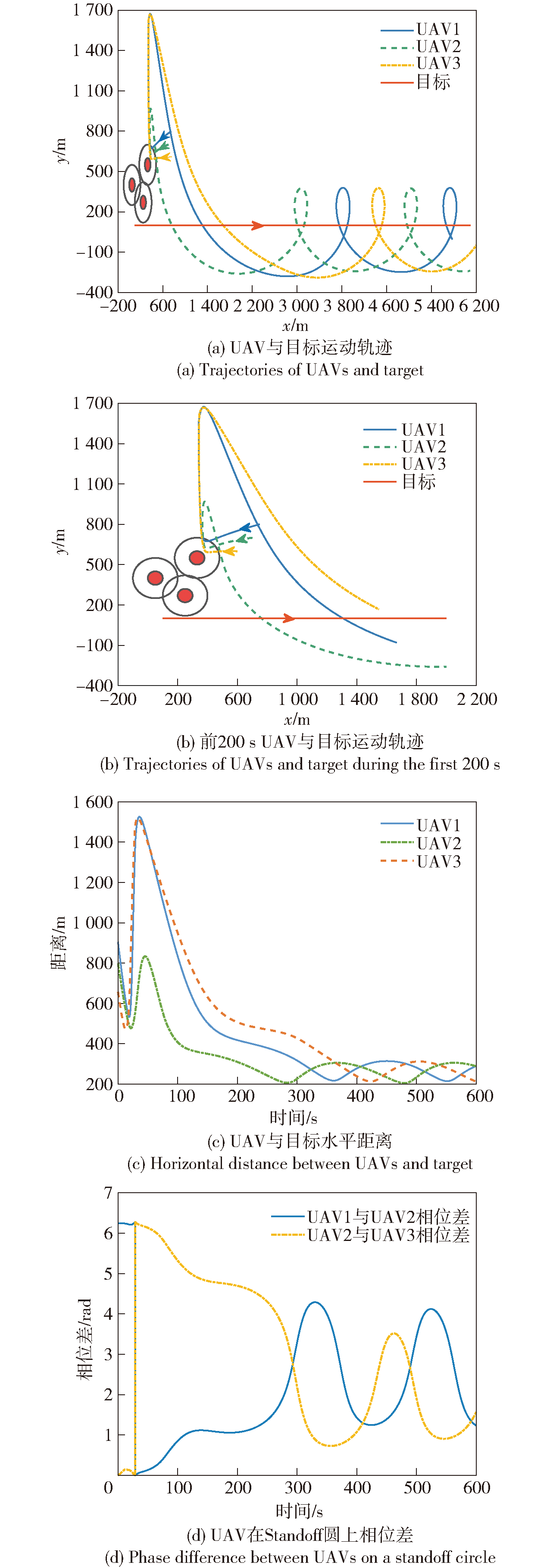
图10 扰动流场方法仿真结果
Fig.10 Simulation results using a interfered fluid method
| UAV | 零空间方法下 与障碍物最小 距离/m | 直接相加方法下 与障碍物最小 距离/m | 扰动流场方法下 与障碍物最小 距离/m |
|---|---|---|---|
| UAV1 | 73.919 | 73.624 | 126.462 |
| UAV2 | 108.069 | 54.895 | 86.388 |
| UAV3 | 63.409 | 61.594 | 69.446 |
表10 3种方法下各UAV与障碍物中心的最小距离
Table 10 Minimum distance between each UAV and obstacles using three different methods
| UAV | 零空间方法下 与障碍物最小 距离/m | 直接相加方法下 与障碍物最小 距离/m | 扰动流场方法下 与障碍物最小 距离/m |
|---|---|---|---|
| UAV1 | 73.919 | 73.624 | 126.462 |
| UAV2 | 108.069 | 54.895 | 86.388 |
| UAV3 | 63.409 | 61.594 | 69.446 |
| [1] |
张云飞, 林德福, 郑多, 等. 多目标时空同步协同攻击无人机任务分配与轨迹优化[J]. 兵工学报, 2021, 42(7): 1482-1495.
|
|
doi: 10.3969/j.issn.1000-1093.2021.07.016 |
|
| [2] |
周健, 龚春林, 谷良贤, 等. 非匹配不确定性条件下的编队分布式协同控制[J]. 系统工程与电子技术, 2019, 41(3): 636-642.
|
|
|
|
| [3] |
邹汝平, 刘建书. 基于概率假设密度滤波与无迹Kalman滤波的多目标跟踪与识别[J]. 兵工学报, 2020, 41(8):1502-1508.
doi: 10.3969/j.issn.1000-1093.2020.08.004 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.004 |
|
| [4] |
张哲, 吴剑, 代冀阳, 等. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12): 2530-2539.
doi: 10.3969/j.issn.1000-1093.2020.12.019 |
|
|
|
| [5] |
|
| [6] |
宗群, 王丹丹, 邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017, 49(3): 1-14.
|
|
|
|
| [7] |
韩月明, 方丹, 张红艳, 等. 无人机集群典型作战运用样式及关键技术分析[J]. 飞航导弹, 2020(9): 43-47.
|
|
|
|
| [8] |
doi: 10.1007/s12555-019-0625-0 |
| [9] |
|
| [10] |
doi: 10.1007/s11431-018-9449-9 |
| [11] |
|
| [12] |
吴健发, 王宏伦, 刘一恒, 等. 无人机避障航路规划方法研究综述[J]. 无人系统技术, 2020, 3(1):1-10.
|
|
|
|
| [13] |
doi: 10.1016/j.ast.2016.04.002 URL |
| [14] |
吴健发, 王宏伦, 王延祥, 等. 无人机反应式扰动流体路径规划[J]. 自动化学报, 2021, 47(12): 1-16.
|
|
|
|
| [15] |
邓伟栋, 唐大全, 唐管政. 无人机编队协同跟踪目标航迹规划[J]. 电光与控制, 2020, 27(9):43-49.
|
|
|
|
| [16] |
doi: 10.1007/s11370-007-0002-3 URL |
| [17] |
doi: 10.1016/j.isatra.2021.05.033 URL |
| [18] |
doi: 10.1109/TSMC.2021.3049681 URL |
| [19] |
|
| [20] |
doi: 10.1142/S2301385022500091 URL |
| [21] |
|
| [22] |
王林. 多无人机协同目标跟踪问题建模与优化技术研究[D]. 长沙: 国防科学技术大学, 2011.
|
|
|
|
| [23] |
|
| [24] |
朱旭. 基于信息一致性的多无人机编队控制方法研究[D]. 西安: 西北工业大学, 2016.
|
|
|
| [1] | 梁苑,戚国庆,陈烨,李银伢,盛安冬. 不完全量测下事件触发水面扩展目标跟踪[J]. 兵工学报, 2024, 45(4): 1219-1228. |
| [2] | 熊光明, 罗震, 孙冬, 陶俊峰, 唐泽月, 吴超. 基于红外相机和毫米波雷达融合的烟雾遮挡无人驾驶车辆目标检测与跟踪[J]. 兵工学报, 2024, 45(3): 893-906. |
| [3] | 杨家铭, 潘悦, 王强, 曹怀刚, 高荪培. 水下弱目标跟踪的深度学习方法研究[J]. 兵工学报, 2024, 45(2): 385-394. |
| [4] | 马潇, 李新祺, 刘镇源, 邸超. 基于背景感知相关滤波跟踪器的目标快速跟踪方法[J]. 兵工学报, 2024, 45(2): 497-503. |
| [5] | 周悦, 李壮壮, 郑然舜, 李军. 无人机火箭助推机构分离安全性研究[J]. 兵工学报, 2024, 45(1): 219-230. |
| [6] | 禹志龙, 李颖晖, 裴彬彬, 徐文丰, 段效聪, 宋可鑫. 具有飞行包线限制的飞翼无人机鲁棒自适应容错姿态控制[J]. 兵工学报, 2024, 45(1): 231-240. |
| [7] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [8] | 郭志明, 娄文忠, 李涛, 张梦宇, 白子龙, 乔虎. 基于改进蝗虫优化算法考虑任务威胁的多无人机协同航迹规划[J]. 兵工学报, 2023, 44(S2): 52-60. |
| [9] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [10] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [11] | 曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166. |
| [12] | 李曾琳, 李波, 白双霞, 孟波波. 基于AM-SAC的无人机自主空战决策[J]. 兵工学报, 2023, 44(9): 2849-2858. |
| [13] | 李思琪, 龚鹏, 单丹, 李剑锋, 刘宇, 高翔. 基于QualNet的无人机信息攻击半实物测试架构设计与实现[J]. 兵工学报, 2023, 44(9): 2709-2721. |
| [14] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [15] | 曹严, 龙腾, 孙景亮, 周禹泽. 信息重传与丢包补偿的多无人机分布式任务分配方法[J]. 兵工学报, 2023, 44(9): 2697-2708. |
| 阅读次数 | ||||||||||||||||||||||||||||||||||||||||||||||||||
|
全文 392
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
摘要 543
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4