
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (S2): 157-166.doi: 10.12382/bgxb.2023.0860
所属专题: 群体协同与自主技术
曹正阳1,2, 张冰1,*( ), 白屹轩3, 勾柯楠1
), 白屹轩3, 勾柯楠1
收稿日期:2023-09-04
上线日期:2024-01-10
通讯作者:
基金资助:
CAO Zhengyang1,2, ZHANG Bing1,*(), BAI Yixuan3, GOU Kenan1
Received:2023-09-04
Online:2024-01-10
摘要:
在信息化战场上,无人机面临多种潜在威胁,不时出现的非意图干扰对无人机系统的卫星信号和通信链路造成干扰,对飞行产生不良影响。为了解决这一挑战,采用多传感器信息融合,以全球导航卫星系统(Global Navigation Satellite System,GNSS)和惯性导航系统(Inertial Navigation System, INS)组合导航系统为主滤波器,并将全球定位系统导航系统和视觉导航系统作为子滤波器,建立了联合滤波器。将多架无人机数字影像的相对导航信息与各无人机平台获取的绝对导航信息融合,实现了一种基于卡尔曼滤波的多地标接力辅助导航算法,有效提高了GNSS/INS相对导航系统的解算精度,降低了多无人机群体的计算负担,扩大了无人机的巡航范围。采用并行分布式的系统框架,将算法部署在多个无人机平台上,通过无人机之间的信息传递和互动,实现多无人机的协同感知与自主定位。在仿真任务场景中进行相关实验,实验结果显示该方法在3架无人机协同导航中位置估计平均误差达到0.66m,速度估计精度保持在±0.4m/s,满足设计要求。
中图分类号:
曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166.
CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information[J]. Acta Armamentarii, 2023, 44(S2): 157-166.
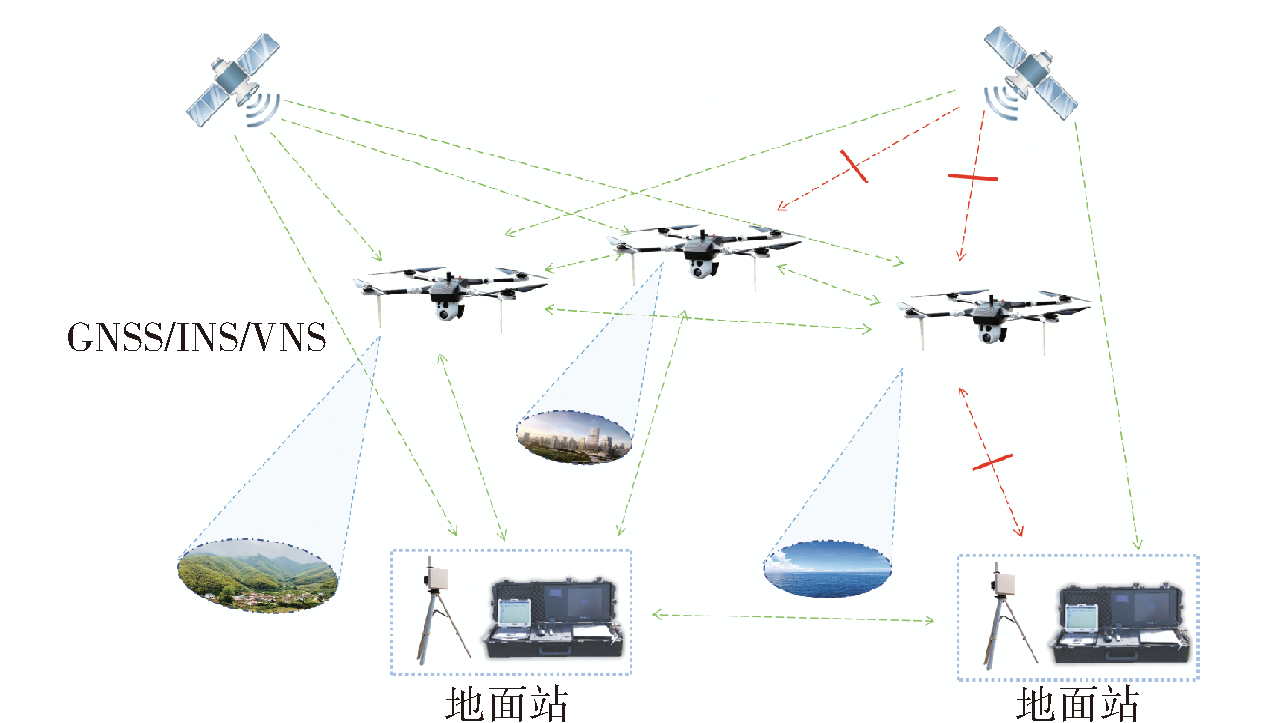
图1 无人机协同导航系统结构示意图
Fig.1 Schematic diagram of multi-UAV cooperative navigation system
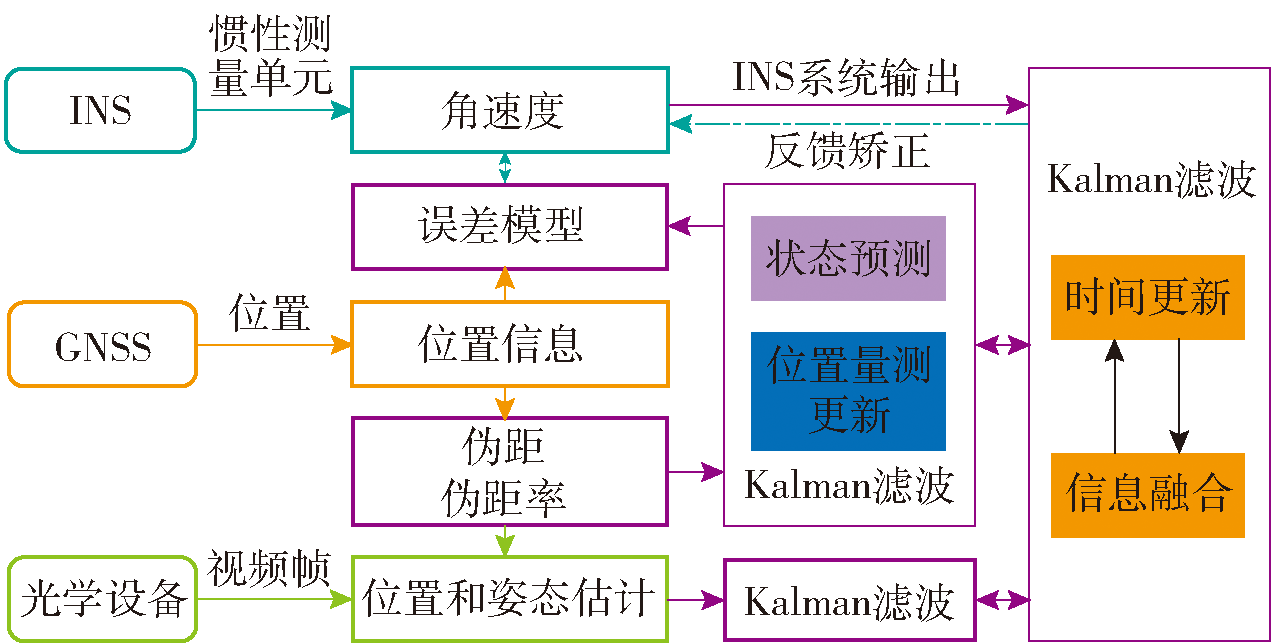
图2 融合导航框架
Fig.2 Schematic diagram of collaborative navigation framework
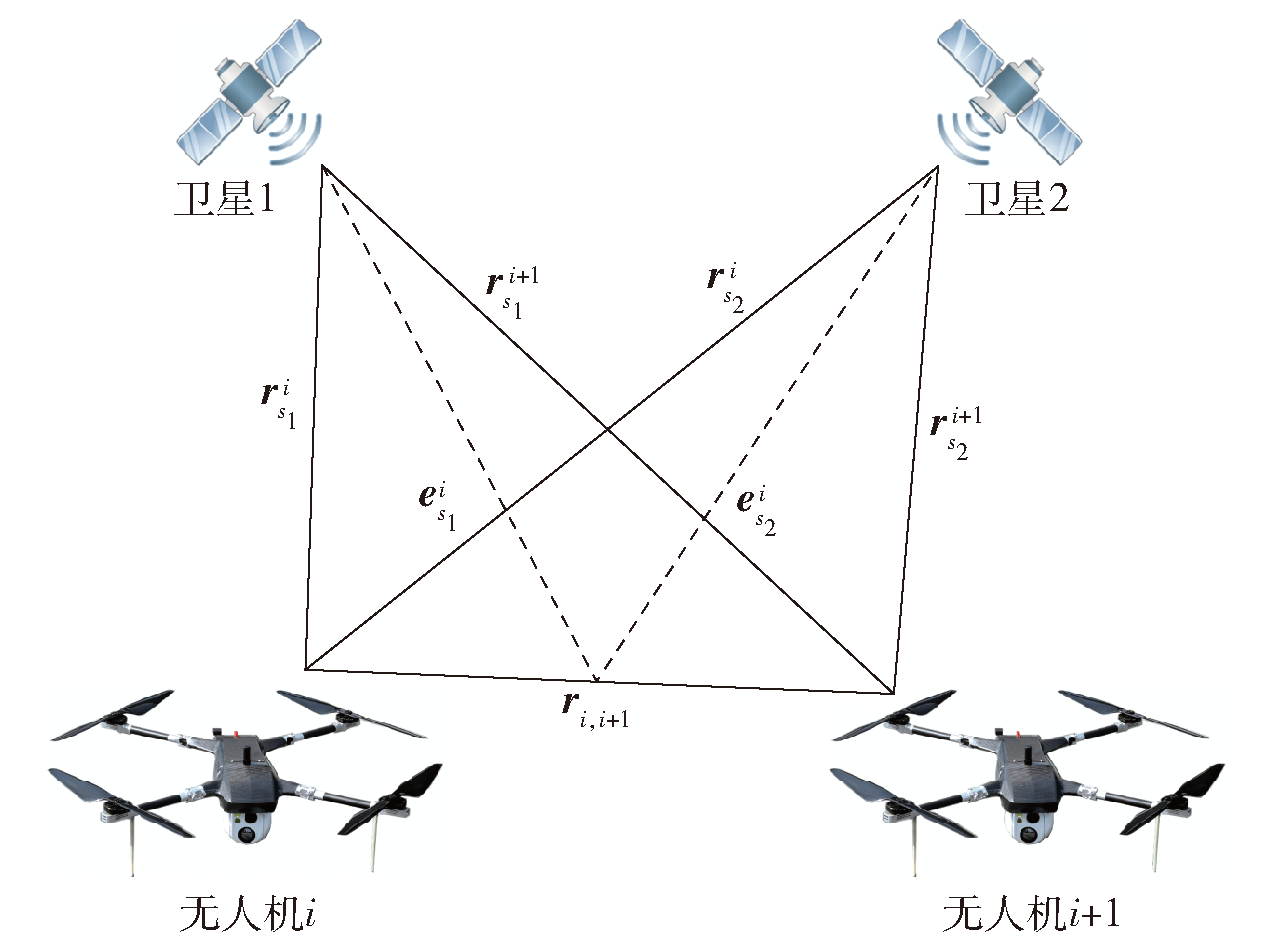
图3 伪距差分定位示意图
Fig.3 Pseudorange differential positioning diagram
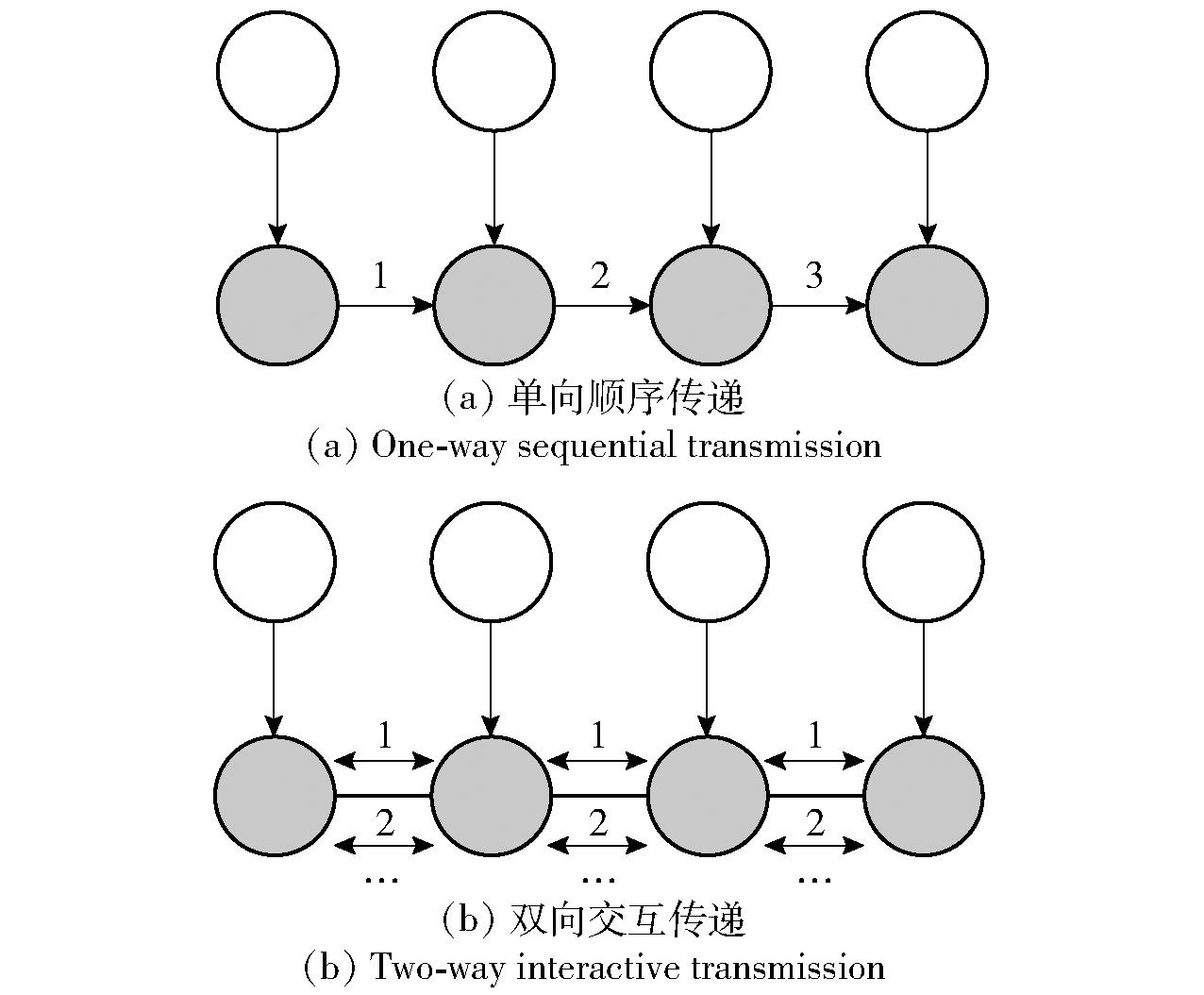
图4 节点间信息传递方式示意图
Fig.4 Schematic diagram of information exchange between nodes
| 陀螺仪 | 零漂:0.1(°)/h | 随机游走:0.01(°)/√h |
|---|---|---|
| 加速度计 | 零漂:100μg | 随机游走:5μg/√Hz |
| GPS | 伪距误差:3m | 伪距率误差:0.03m/s |
| 光电传感器 | 稳定精度:5μrad | 精度误差:0.35mm/pixel |
表1 导航设备参数
Table 1 Navigation devices parameters
| 陀螺仪 | 零漂:0.1(°)/h | 随机游走:0.01(°)/√h |
|---|---|---|
| 加速度计 | 零漂:100μg | 随机游走:5μg/√Hz |
| GPS | 伪距误差:3m | 伪距率误差:0.03m/s |
| 光电传感器 | 稳定精度:5μrad | 精度误差:0.35mm/pixel |
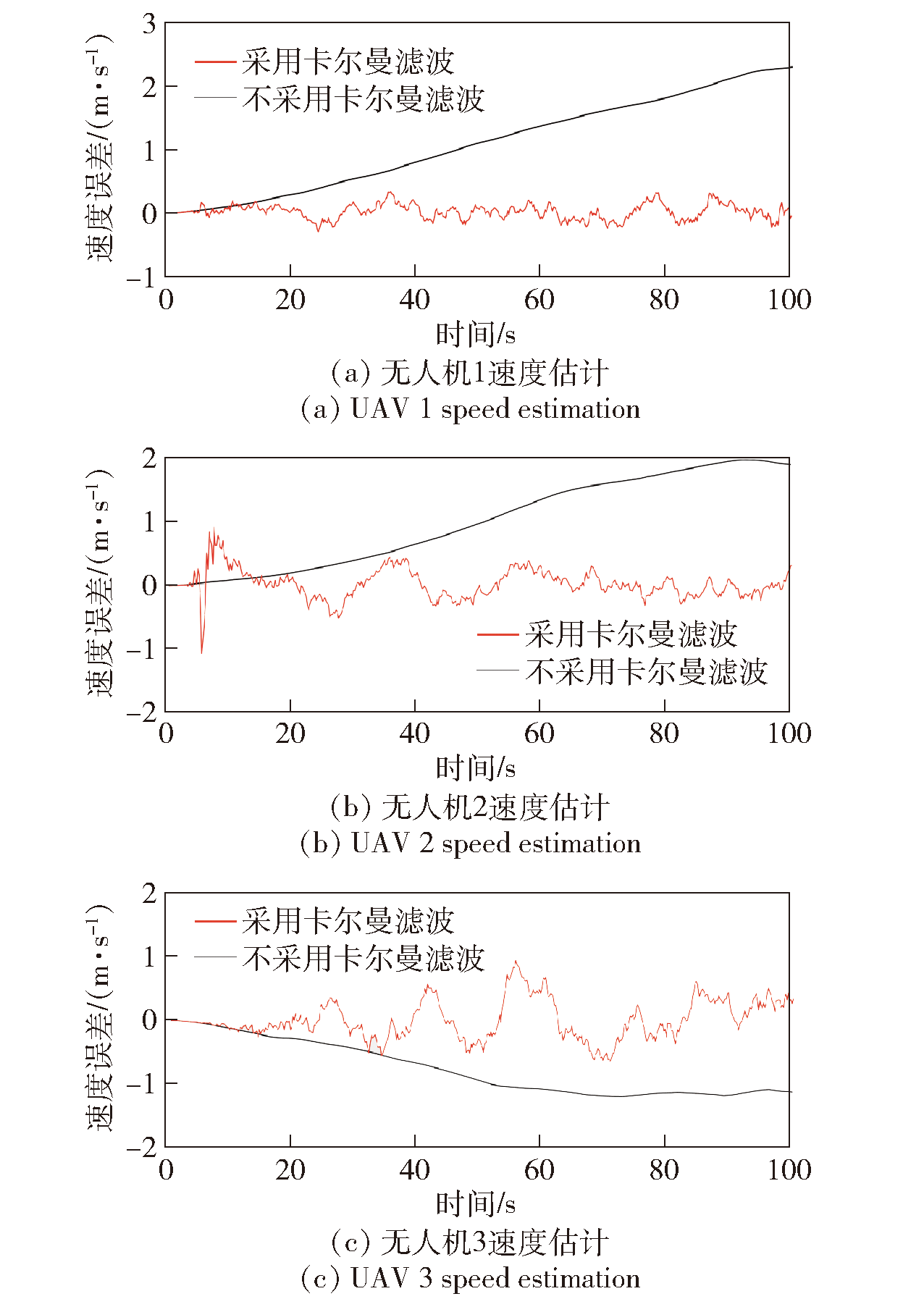
图5 卡尔曼滤波器速度估计误差对比图
Fig.5 Comparison of speed estimation errors of Kalman filtering
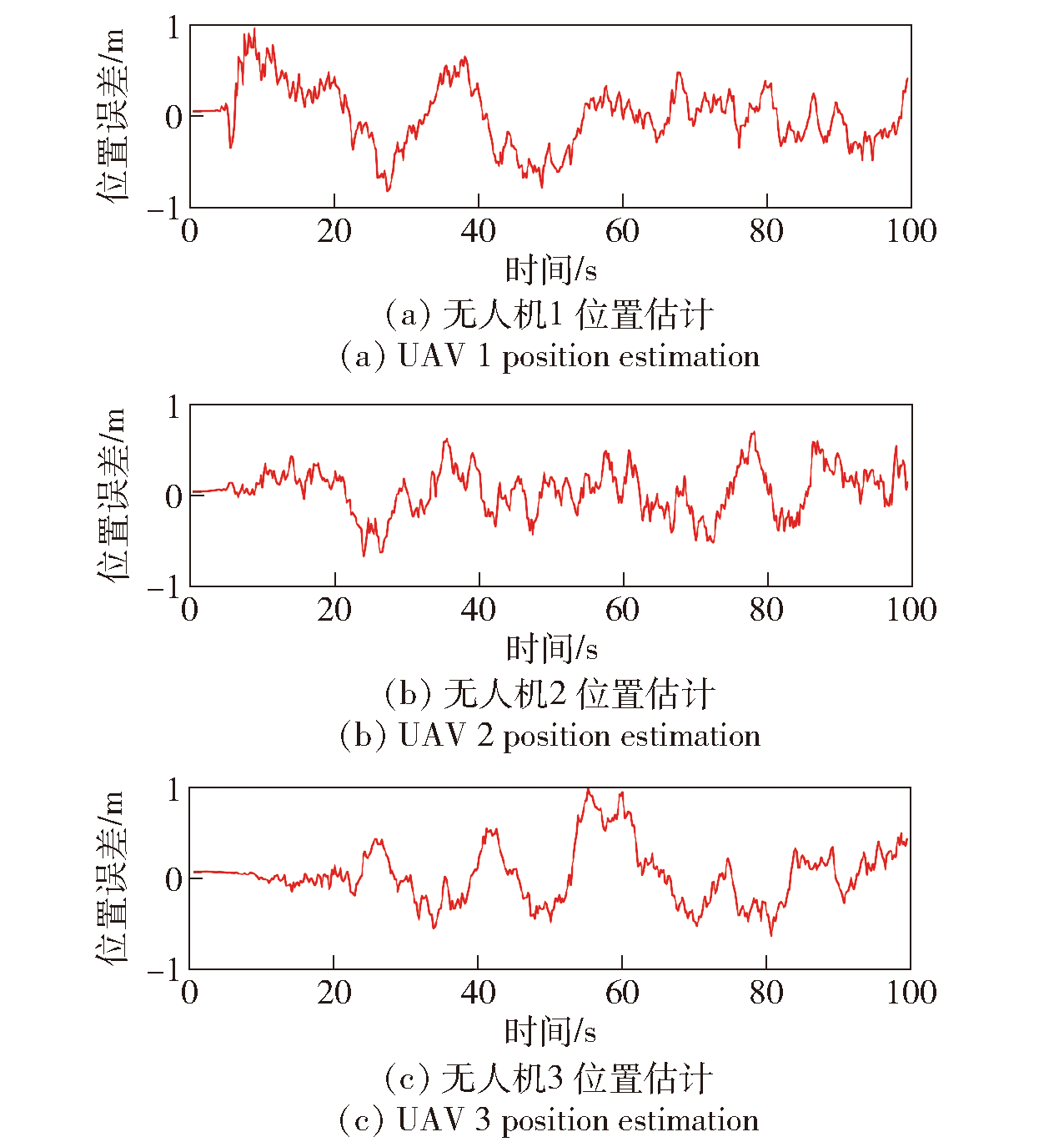
图6 GNSS/INS/VNS组合位置估计距离误差测试图
Fig.6 GNSS/INS/VNS position estimation error Testing
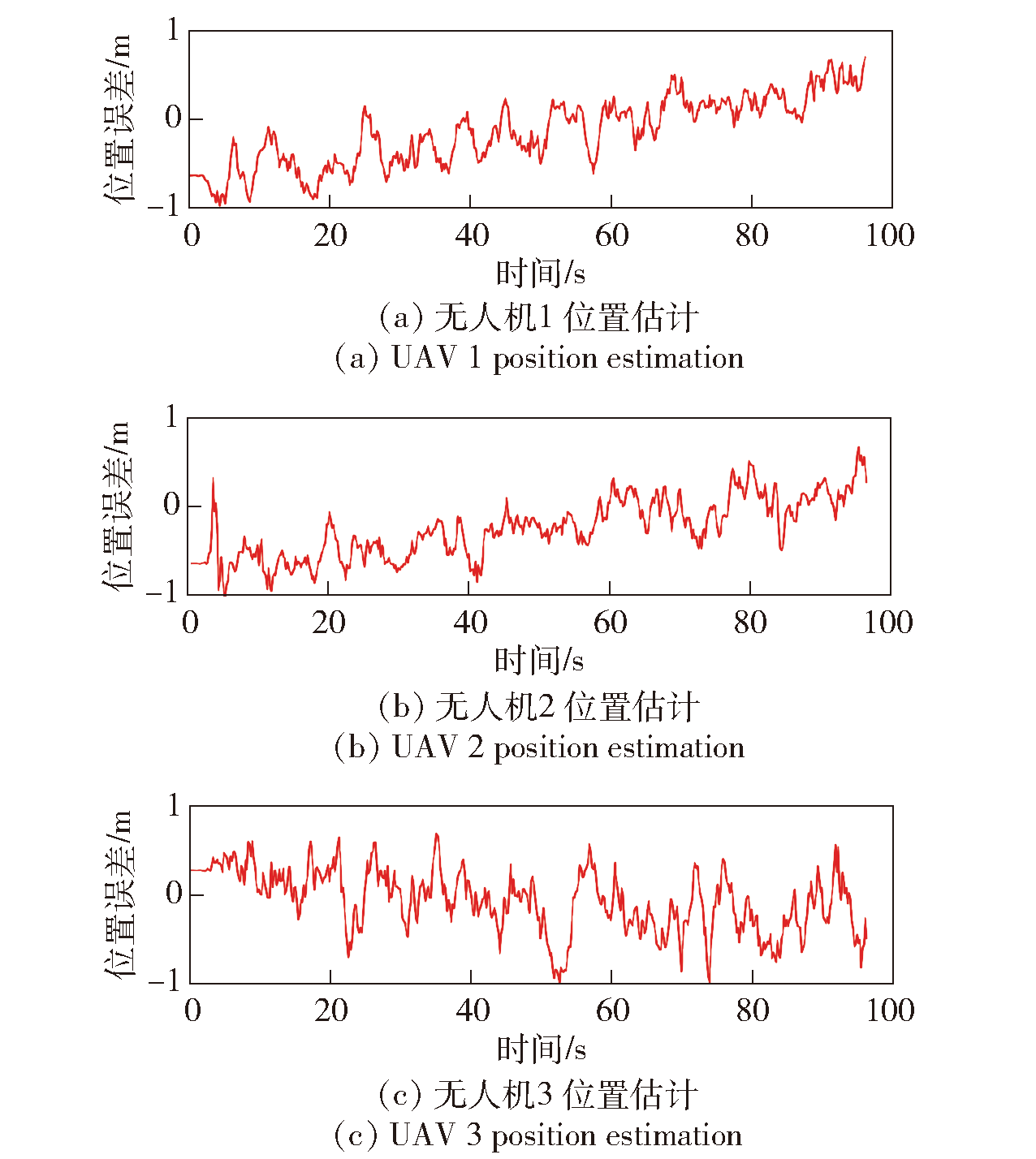
图7 GPS位置估计距离误差测试图
Fig.7 GPS position estimation error testing
| 定位方式 | 平均误差/m |
|---|---|
| GPS | 0.66 |
| GNSS/INS/VNS组合 | 0.25 |
表2 定位误差对比
Table 2 Positioning error comparison
| 定位方式 | 平均误差/m |
|---|---|
| GPS | 0.66 |
| GNSS/INS/VNS组合 | 0.25 |
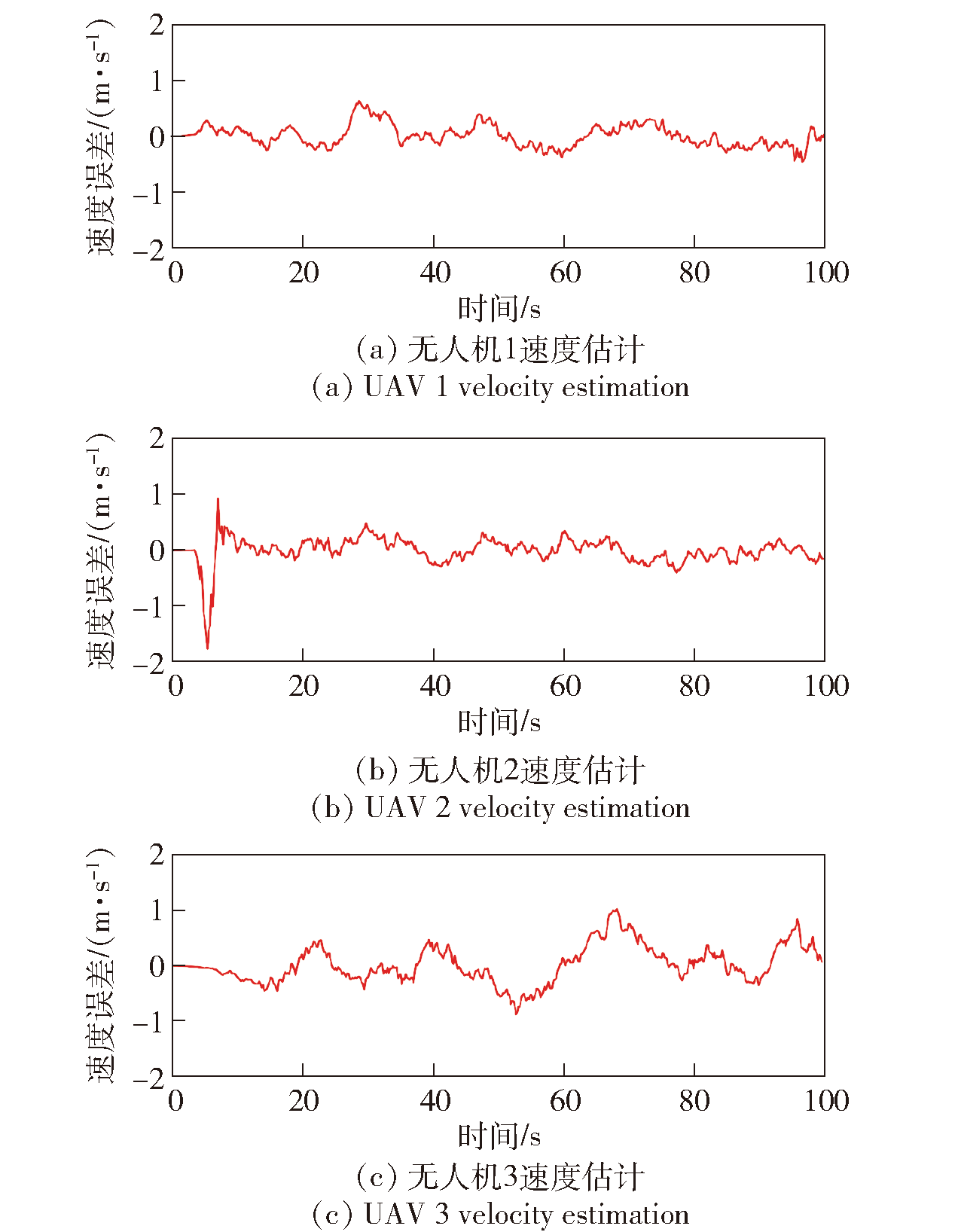
图8 速度估计误差测试图
Fig.8 Velocity estimation error Testing
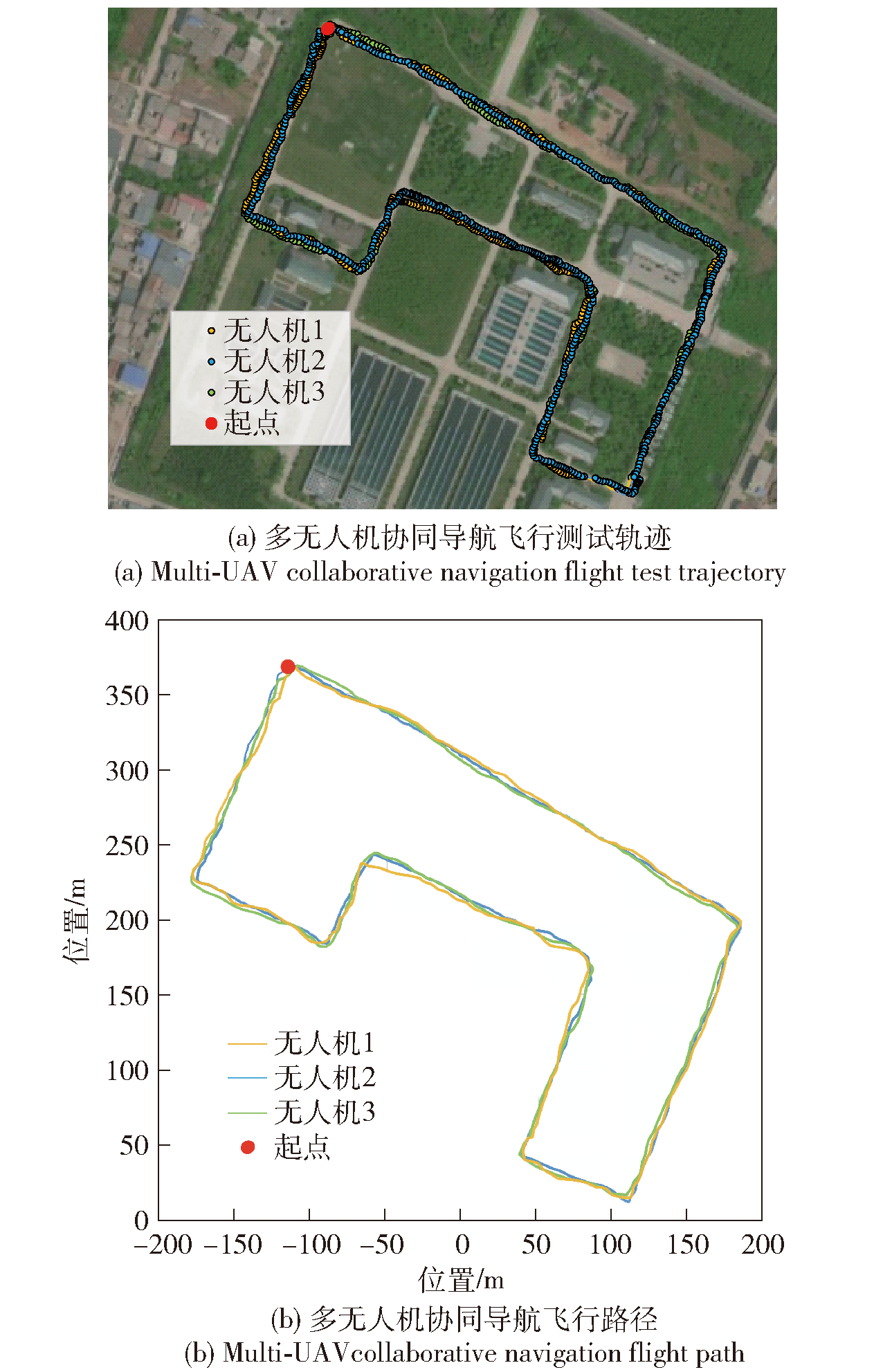
图9 多无人机协同导航飞行测试示意图
Fig.9 Schematic diagram of multi-UAVcollaborative navigation flight testing
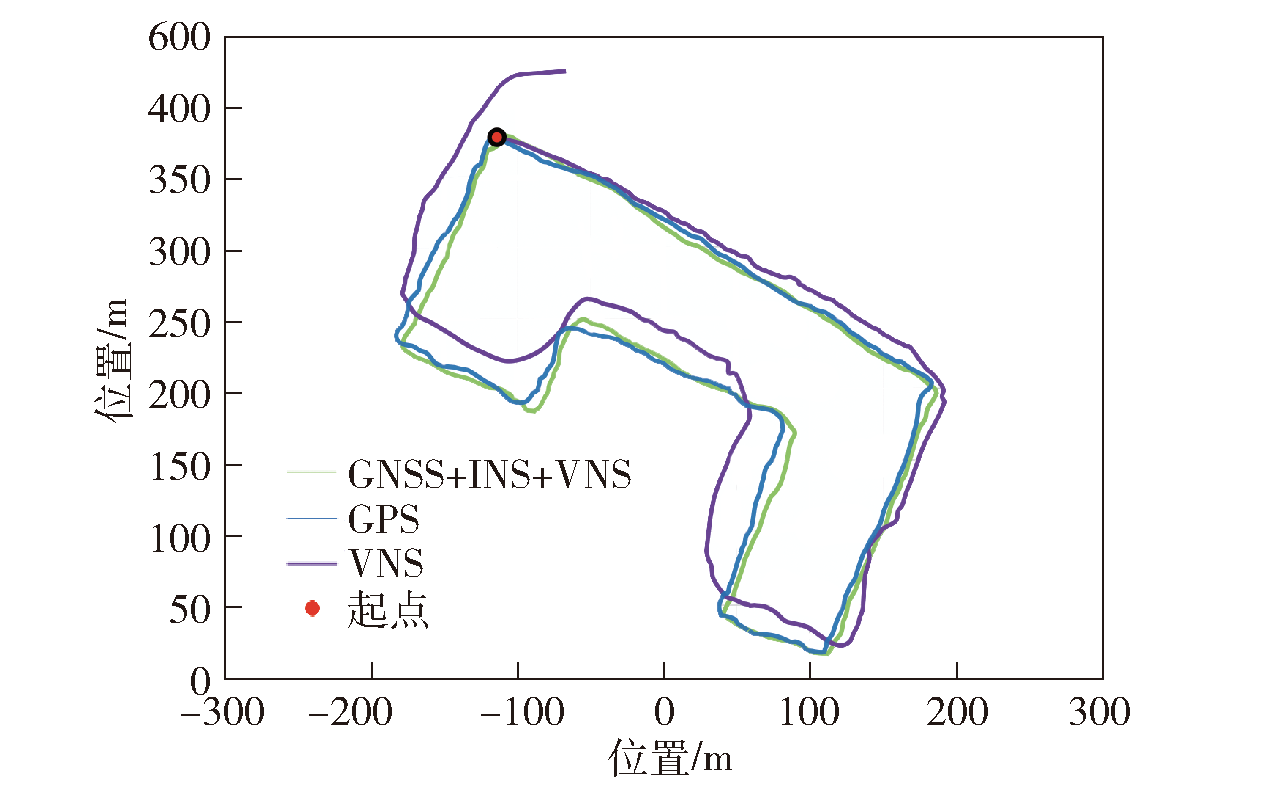
图10 协同导航算法的鲁棒性对比测试图
Fig.10 Robustness comparison test chart of collaborative navigation algorithms
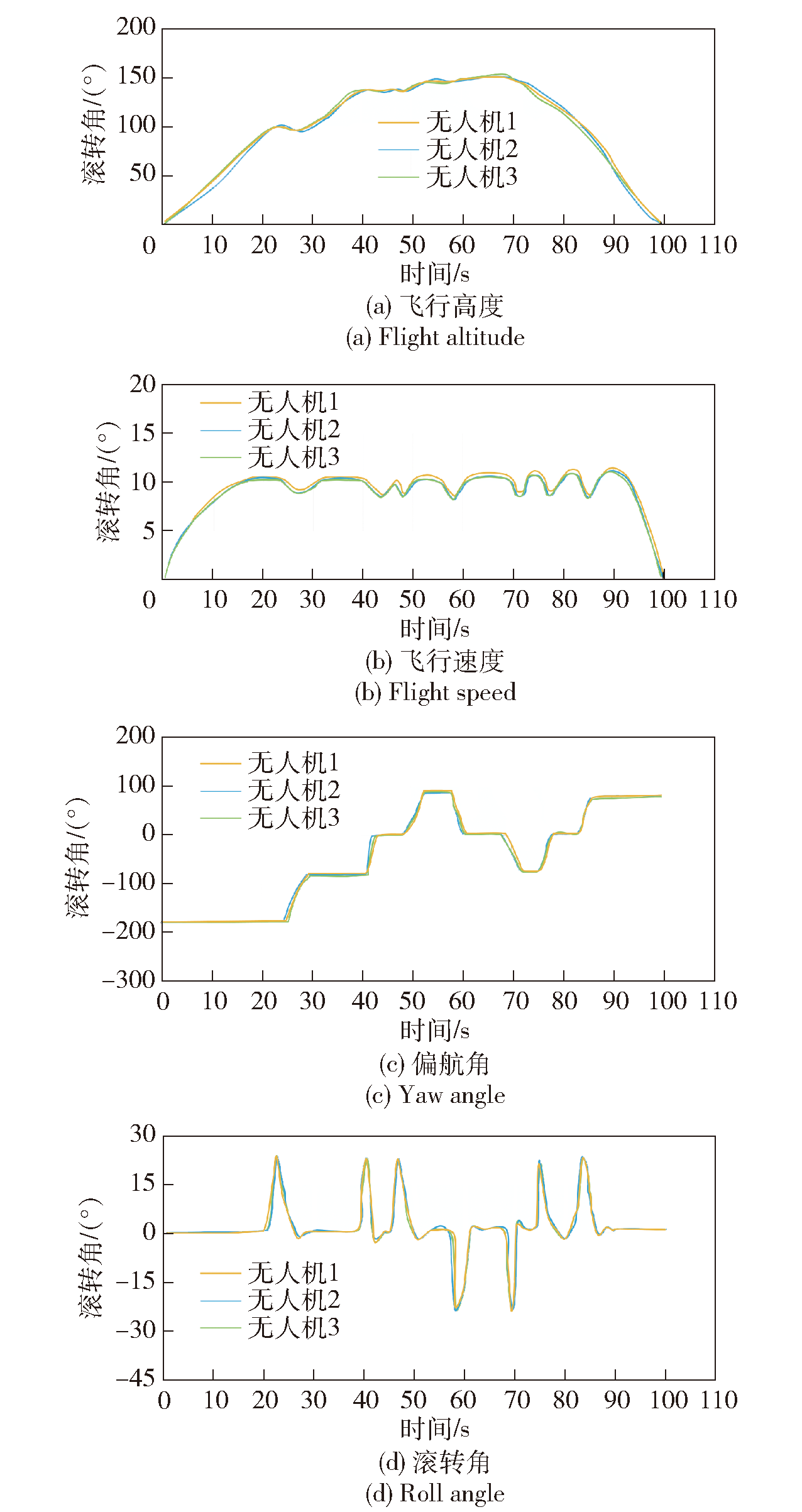
图11 协同导航位姿漂移特性测试图
Fig.11 Test charts of collaborative navigation pose drift characteristics
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.324 | 0.483 | 0.467 |
| y | 6.057 | 1.948 | 1.985 |
| z | 1.380 | 0.594 | 0.617 |
表3 无人机1绝对位置误差
Table 3 UAV 1absolute position error
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.324 | 0.483 | 0.467 |
| y | 6.057 | 1.948 | 1.985 |
| z | 1.380 | 0.594 | 0.617 |
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.544 | 0.563 | 0.559 |
| y | 3.249 | 1.873 | 1.867 |
| z | 1.651 | 0.682 | 0.674 |
表4 无人机2绝对位置误差
Table 4 UAV 2 absolute position error
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.544 | 0.563 | 0.559 |
| y | 3.249 | 1.873 | 1.867 |
| z | 1.651 | 0.682 | 0.674 |
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.475 | 0.522 | 0.507 |
| y | 2.931 | 1.827 | 1.796 |
| z | 1.275 | 0.537 | 0.512 |
表5 无人机3绝对位置误差
Table 5 UAV 3 absolute position error
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.475 | 0.522 | 0.507 |
| y | 2.931 | 1.827 | 1.796 |
| z | 1.275 | 0.537 | 0.512 |
| [1] |
甄子洋. 舰载无人机自主着舰回收制导与控制研究进展[J]. 自动化学报, 2019, 45(4): 669-681.
|
|
|
|
| [2] |
doi: 10.1016/j.compag.2020.105695 URL |
| [3] |
doi: 10.1017/S037346332200025X URL |
| [4] |
|
| [5] |
|
| [6] |
范博洋, 赵高鹏, 薄煜明, 等. 多目标空地异构无人系统协同任务分配方法[J]. 兵工学报, 2023, 44(6): 1564-1575.
doi: 10.12382/bgxb.2022.0095 |
|
doi: 10.12382/bgxb.2022.0095 |
|
| [7] |
王孟阳, 张栋, 唐硕, 等. 基于动态联盟策略的无人机集群在线任务规划方法[J]. 兵工学报, 2023, 44(8): 2207-2223.
doi: 10.12382/bgxb.2022.0247 |
|
doi: 10.12382/bgxb.2022.0247 |
|
| [8] |
doi: 10.3390/drones6080208 URL |
| [9] |
doi: 10.1088/1742-6596/1650/3/032085 |
| [10] |
doi: 10.1088/1361-6501/ace19b |
| [11] |
doi: 10.3390/rs15153725 URL |
| [12] |
doi: 10.1109/MVT.2015.2481560 URL |
| [13] |
郑磊, 陈志敏, 贾宇轩. 基于广域部署智能反射面的无人机集群跟踪方法[J]. 兵工学报, 2023, 44(6): 1837-1845.
doi: 10.12382/bgxb.2022.0217 |
|
doi: 10.12382/bgxb.2022.0217 |
|
| [14] |
doi: 10.1016/j.ast.2017.09.024 URL |
| [15] |
doi: 10.1016/j.ast.2020.106068 URL |
| [16] |
doi: 10.1016/j.adhoc.2012.04.012 URL |
| [17] |
doi: 10.1109/LSP.2013.2290192 URL |
| [18] |
|
| [19] |
李松, 刘哲, 唐小妹, 等. 基于固定点迭代的Huber鲁棒容积卡尔曼滤波算法[J]. 计算机工程与应用, 2021, 57(16): 90-96.
doi: 10.3778/j.issn.1002-8331.2007-0105 |
|
|
|
| [20] |
宁静, 陈俊, 吴麒. 一种基于期望模型的自适应Singer模型滤波算法[J]. 电讯技术, 2022, 62(10): 1464-1469.
|
|
|
|
| [21] |
郝顺义, 卢航, 魏翔, 等. 简化高阶强跟踪容积卡尔曼滤波及其在组合导航中的应用[J]. 控制与决策, 2019, 34(10): 2105-2114.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
doi: 10.3390/app12115565 URL |
| [25] |
doi: 10.1109/JSEN.2022.3155166 URL |
| [26] |
doi: 10.3390/app13095790 URL |
| [27] |
万芯炜, 王晶, 杨辉, 等. BP神经网络结合粒子群优化卡尔曼滤波的MEMS陀螺随机误差补偿方法[J]. 兵工学报, 2023, 44(2): 556-565.
doi: 10.12382/bgxb.2022.0110 |
|
doi: 10.12382/bgxb.2022.0110 |
|
| [28] |
doi: 10.1109/TCST.2022.3174511 URL |
| [29] |
doi: 10.3390/rs13163328 URL |
| [30] |
BLAZQUEZ-GARCIAA, CONDEA,
|
| [31] |
doi: 10.3390/rs14174367 URL |
| [1] | 周悦, 李壮壮, 郑然舜, 李军. 无人机火箭助推机构分离安全性研究[J]. 兵工学报, 2024, 45(1): 219-230. |
| [2] | 禹志龙, 李颖晖, 裴彬彬, 徐文丰, 段效聪, 宋可鑫. 具有飞行包线限制的飞翼无人机鲁棒自适应容错姿态控制[J]. 兵工学报, 2024, 45(1): 231-240. |
| [3] | 郭志明, 娄文忠, 李涛, 张梦宇, 白子龙, 乔虎. 基于改进蝗虫优化算法考虑任务威胁的多无人机协同航迹规划[J]. 兵工学报, 2023, 44(S2): 52-60. |
| [4] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [5] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [6] | 赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696. |
| [7] | 李曾琳, 李波, 白双霞, 孟波波. 基于AM-SAC的无人机自主空战决策[J]. 兵工学报, 2023, 44(9): 2849-2858. |
| [8] | 李思琪, 龚鹏, 单丹, 李剑锋, 刘宇, 高翔. 基于QualNet的无人机信息攻击半实物测试架构设计与实现[J]. 兵工学报, 2023, 44(9): 2709-2721. |
| [9] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [10] | 曹严, 龙腾, 孙景亮, 周禹泽. 信息重传与丢包补偿的多无人机分布式任务分配方法[J]. 兵工学报, 2023, 44(9): 2697-2708. |
| [11] | 刘兴宇, 郭荣化, 任成才, 闫超, 常远, 周晗, 相晓嘉. 基于身份匈牙利算法的无人机蜂群分布式目标分配方法[J]. 兵工学报, 2023, 44(9): 2824-2835. |
| [12] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [13] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [14] | 宫远强, 张业鹏, 马万鹏, 薛霄. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9): 2661-2671. |
| [15] | 李军, 陈士超. 无人机蜂群关键技术发展综述[J]. 兵工学报, 2023, 44(9): 2533-2545. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4