
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (1): 219-230.doi: 10.12382/bgxb.2023.0362
周悦1, 李壮壮1, 郑然舜2, 李军1,*( )
)
收稿日期:2023-04-21
上线日期:2024-01-30
通讯作者:
基金资助:
ZHOU Yue1, LI Zhuangzhuang1, ZHENG Ranshun2, LI Jun1,*()
Received:2023-04-21
Online:2024-01-30
摘要:
为提高火箭助推式无人机起飞时助推机构的分离安全性,提出一种可自动安全分离的无人机火箭助推机构。以某型号无人机为例,运用理论力学与刚体运动学知识建立以分离安全性最优为目标的助推机构理论模型,得出助推机构中关键参数的设计依据并建立助推机构的三维模型。运用刚体动力学分析方法得到助推机构的分离运动轨迹,搭建包含助推机构和模拟无人机部分的实验系统,验证助推机构分离轨迹和分离姿态与仿真结构有一致的变化趋势。研究结果表明,该助推机构在分离过程中可有效规避安全隐患,提高分离安全性。
中图分类号:
周悦, 李壮壮, 郑然舜, 李军. 无人机火箭助推机构分离安全性研究[J]. 兵工学报, 2024, 45(1): 219-230.
ZHOU Yue, LI Zhuangzhuang, ZHENG Ranshun, LI Jun. Research on Safe Separation Mechanism of UAV Rocket Booster[J]. Acta Armamentarii, 2024, 45(1): 219-230.

图1 某助推火箭发动机的安装
Fig.1 Installation of a booster rocket engine
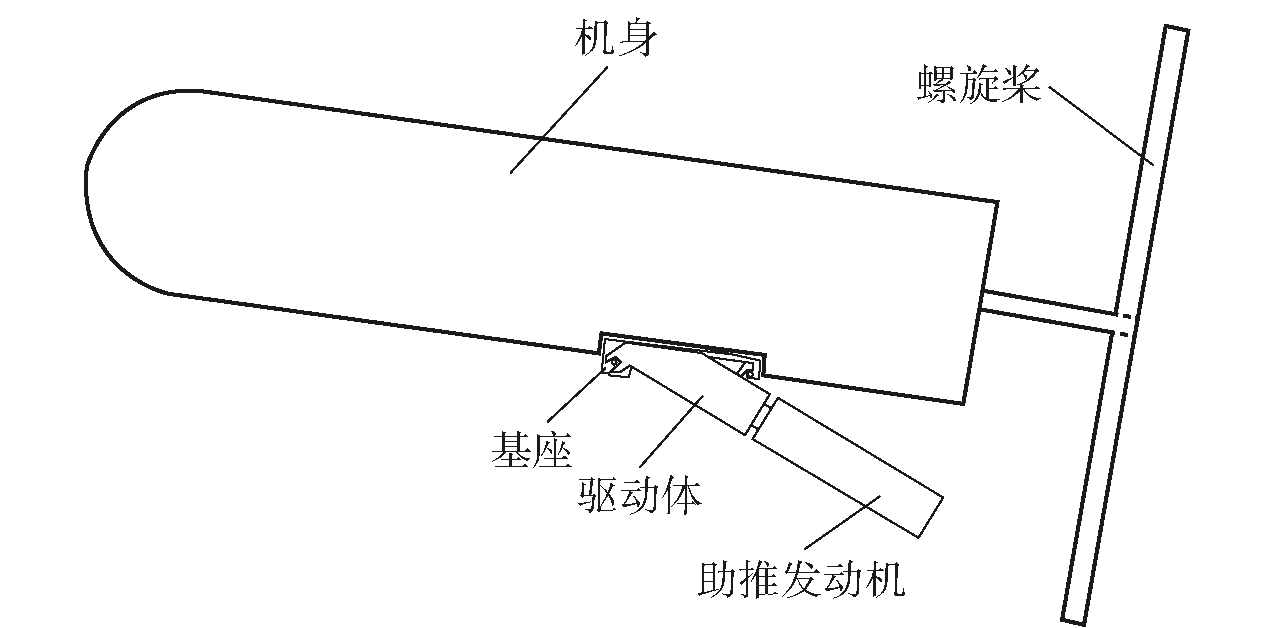
图2 无人机与助推机构组成示意图
Fig.2 Schematic diagram of UAV and booster
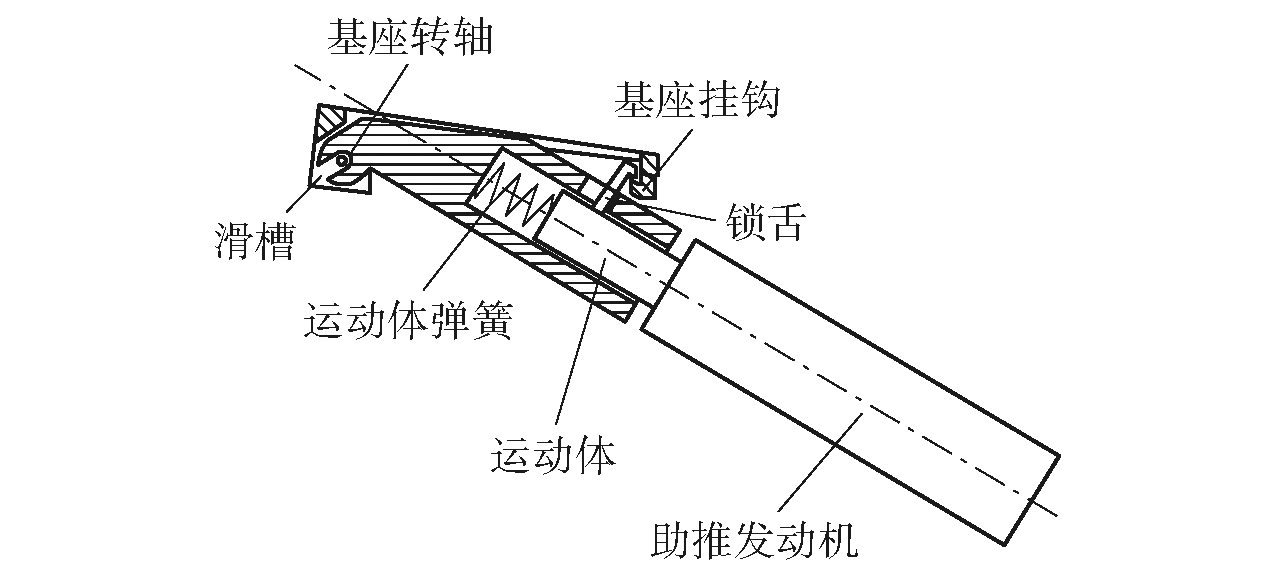
图3 助推机构使用原理示意图
Fig.3 Schematic diagram of booster principle
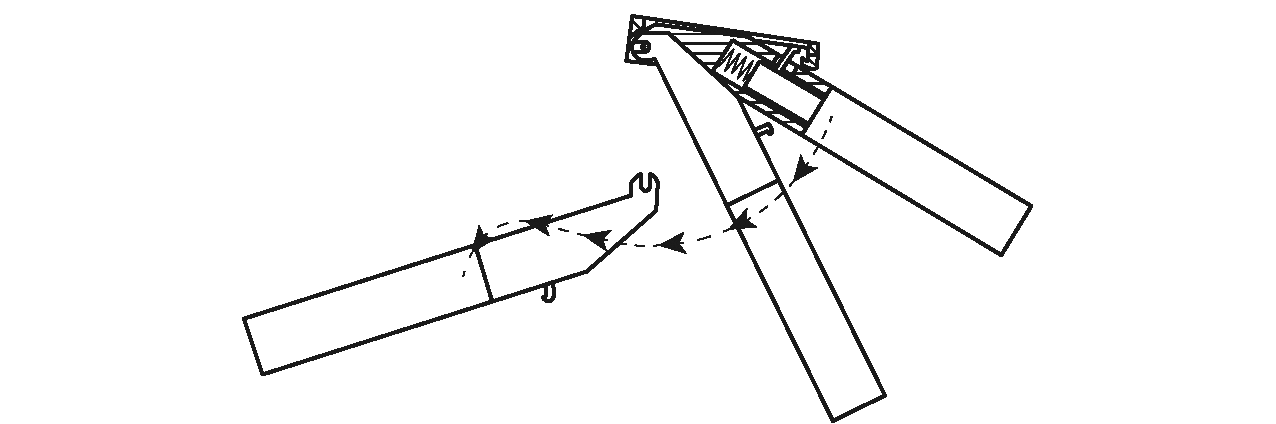
图4 助推机构分离过程示意图
Fig.4 Schematic diagram of booster separation process
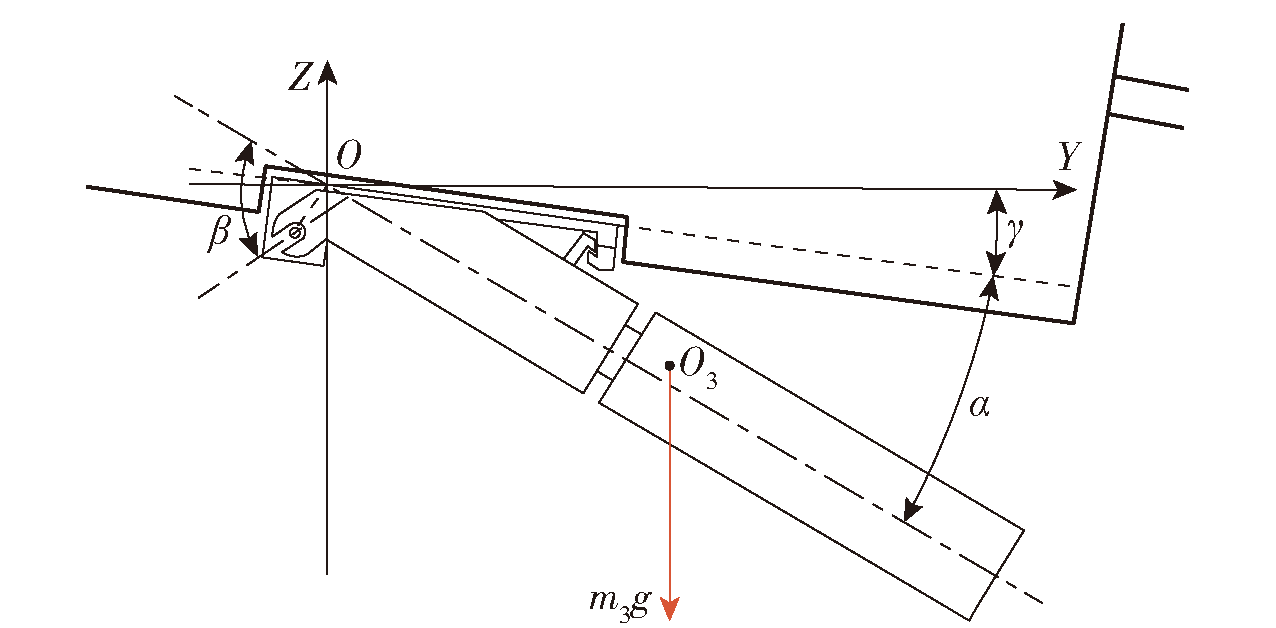
图5 UAV坐标系示意图
Fig.5 UAV coordinate system
图6 助推机构坐标系示意图
Fig.6 Booster coordinate system
| 符号 | 定义 | 符号 | 定义 |
|---|---|---|---|
| m1/kg | 驱动体质量 | m2/kg | 发动机分离质量 |
| O1/mm | 駆动体质心 | O2/mm | 发动机质心 |
| m3/kg | 助推机构质量 | O3/mm | 助推机构质心 |
| (x1,y1)/mm | 驱动体质心坐标 | (x2,y2)/mm | 助推发动机质心坐标 |
| I1/(kg·m2) | 驱动体转动惯量 | I2/(kg·m2) | 助推发动机转动惯量 |
| (x3,y3)/mm | 助推机构质心坐标 | I3/(kg·m2) | 助推机构转动惯量 |
| l1/mm | 驱动体长度 | l2/m | 助推发动机长度 |
| r0/mm | 基座转轴半径 | r/mm | 助推发动机半径 |
| α/(°) | 推力角 | γ/(°) | 仰角 |
| β/(°) | 滑槽角 | Fmax/N | 推力峰值 |
| δ/mm | 推力偏置距离 | Ft/N | 稳定推力值 |
表1 助推机构结构参数
Table 1 Structure parameters of booster
| 符号 | 定义 | 符号 | 定义 |
|---|---|---|---|
| m1/kg | 驱动体质量 | m2/kg | 发动机分离质量 |
| O1/mm | 駆动体质心 | O2/mm | 发动机质心 |
| m3/kg | 助推机构质量 | O3/mm | 助推机构质心 |
| (x1,y1)/mm | 驱动体质心坐标 | (x2,y2)/mm | 助推发动机质心坐标 |
| I1/(kg·m2) | 驱动体转动惯量 | I2/(kg·m2) | 助推发动机转动惯量 |
| (x3,y3)/mm | 助推机构质心坐标 | I3/(kg·m2) | 助推机构转动惯量 |
| l1/mm | 驱动体长度 | l2/m | 助推发动机长度 |
| r0/mm | 基座转轴半径 | r/mm | 助推发动机半径 |
| α/(°) | 推力角 | γ/(°) | 仰角 |
| β/(°) | 滑槽角 | Fmax/N | 推力峰值 |
| δ/mm | 推力偏置距离 | Ft/N | 稳定推力值 |
图7 助推机构分离过程示意图
Fig.7 Schematic diagram of booster separation process
图8 助推机构分离过程示意图
Fig.8 Schematic diagram of booster separation process
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| γ/(°) | 10 | r0/m | 0.025 |
| α/(°) | 25 | β/(°) | 待优化 |
| (x3,y3)/m | $\left(\frac{0.5 l_{1}+6 \times\left(l_{1}+0.268\right)}{m_{1}+7}, 0\right) $ | m2/kg | 6 |
| I3/(kg·m-2) | m1(0.0075+ )+6(l1+0.268-x3)2+m1(x3- l1)2+0.1474 | (x2,y2)/m | (l1+0.268,0) |
| δ/m | 0.015 | I2/(kg·m-2) | 0.1474 |
| m1/kg | 待优化 | l2/m | 0.536 |
| (x1,y1)/m | ( l1,0) | r/m | 0.05 |
| I1/(kg·m-2) | m1(0.0075+ ) | Fmax/kN | 9.3 |
| l1/m | 待优化 | Ft/kN | 8.0 |
表2 某无人机助推机构参数
Table 2 Parameters of a UAV booster
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| γ/(°) | 10 | r0/m | 0.025 |
| α/(°) | 25 | β/(°) | 待优化 |
| (x3,y3)/m | $\left(\frac{0.5 l_{1}+6 \times\left(l_{1}+0.268\right)}{m_{1}+7}, 0\right) $ | m2/kg | 6 |
| I3/(kg·m-2) | m1(0.0075+ )+6(l1+0.268-x3)2+m1(x3- l1)2+0.1474 | (x2,y2)/m | (l1+0.268,0) |
| δ/m | 0.015 | I2/(kg·m-2) | 0.1474 |
| m1/kg | 待优化 | l2/m | 0.536 |
| (x1,y1)/m | ( l1,0) | r/m | 0.05 |
| I1/(kg·m-2) | m1(0.0075+ ) | Fmax/kN | 9.3 |
| l1/m | 待优化 | Ft/kN | 8.0 |
图9 50°滑槽角助推机构分离过程
Fig.9 Separation process of 50° chute angle booster
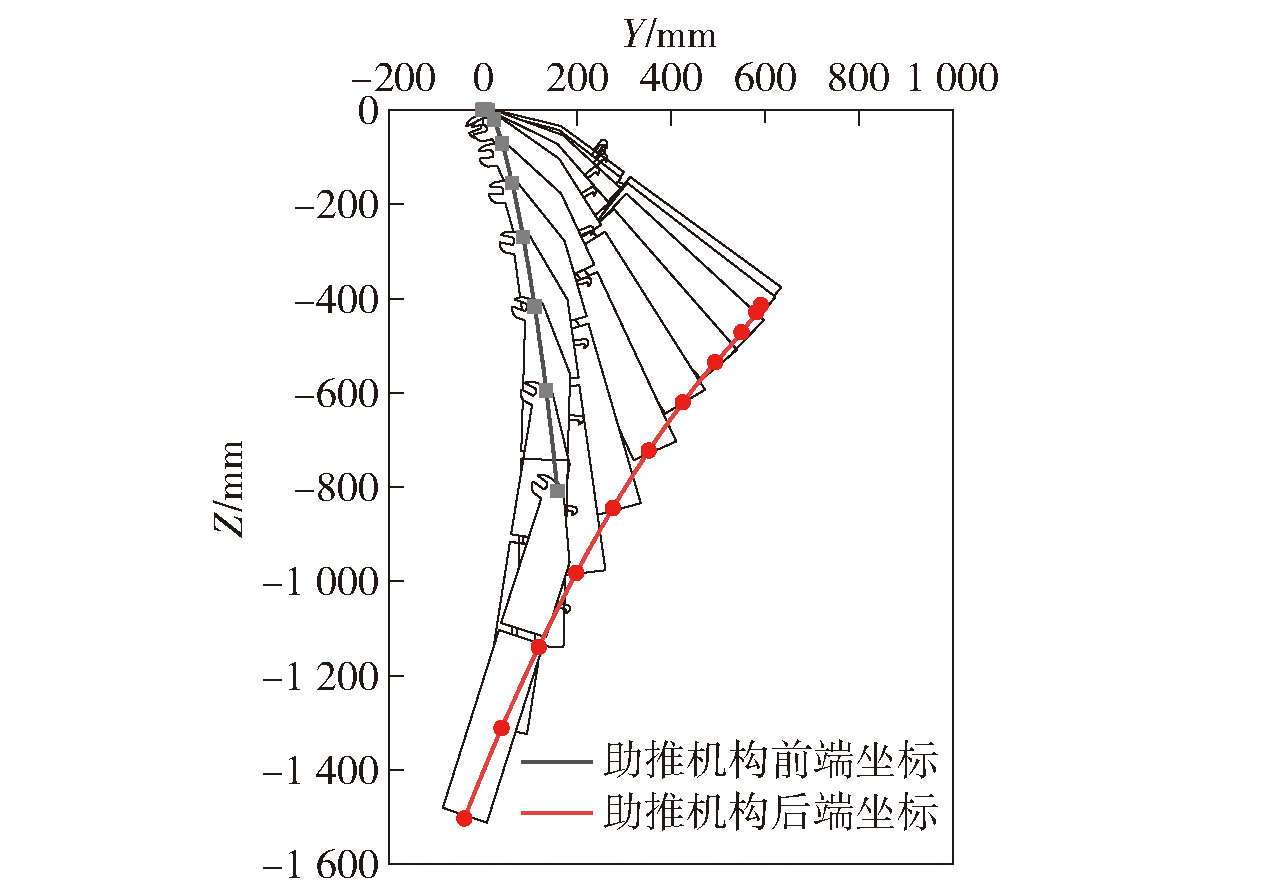
图10 70°滑槽角助推机构分离过程
Fig.10 Separation process of 70° chute angle booster
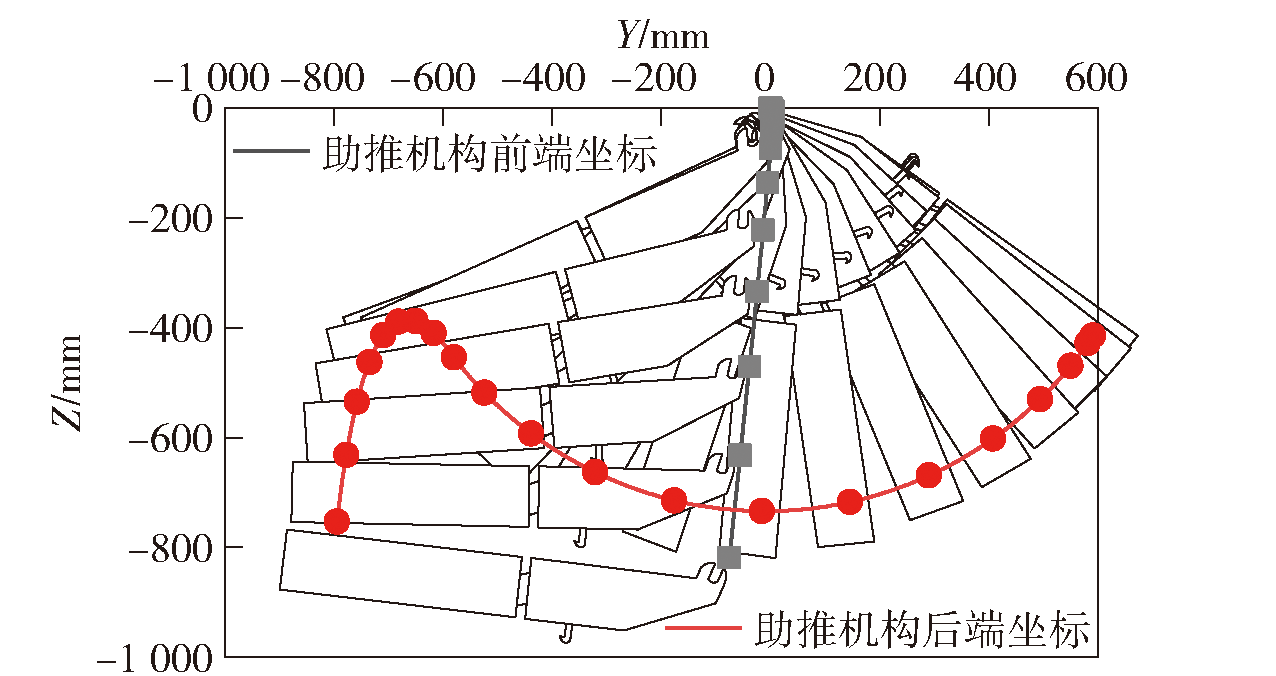
图11 90°滑槽角助推机构分离过程
Fig.11 Separation process of 90° chute angle booster
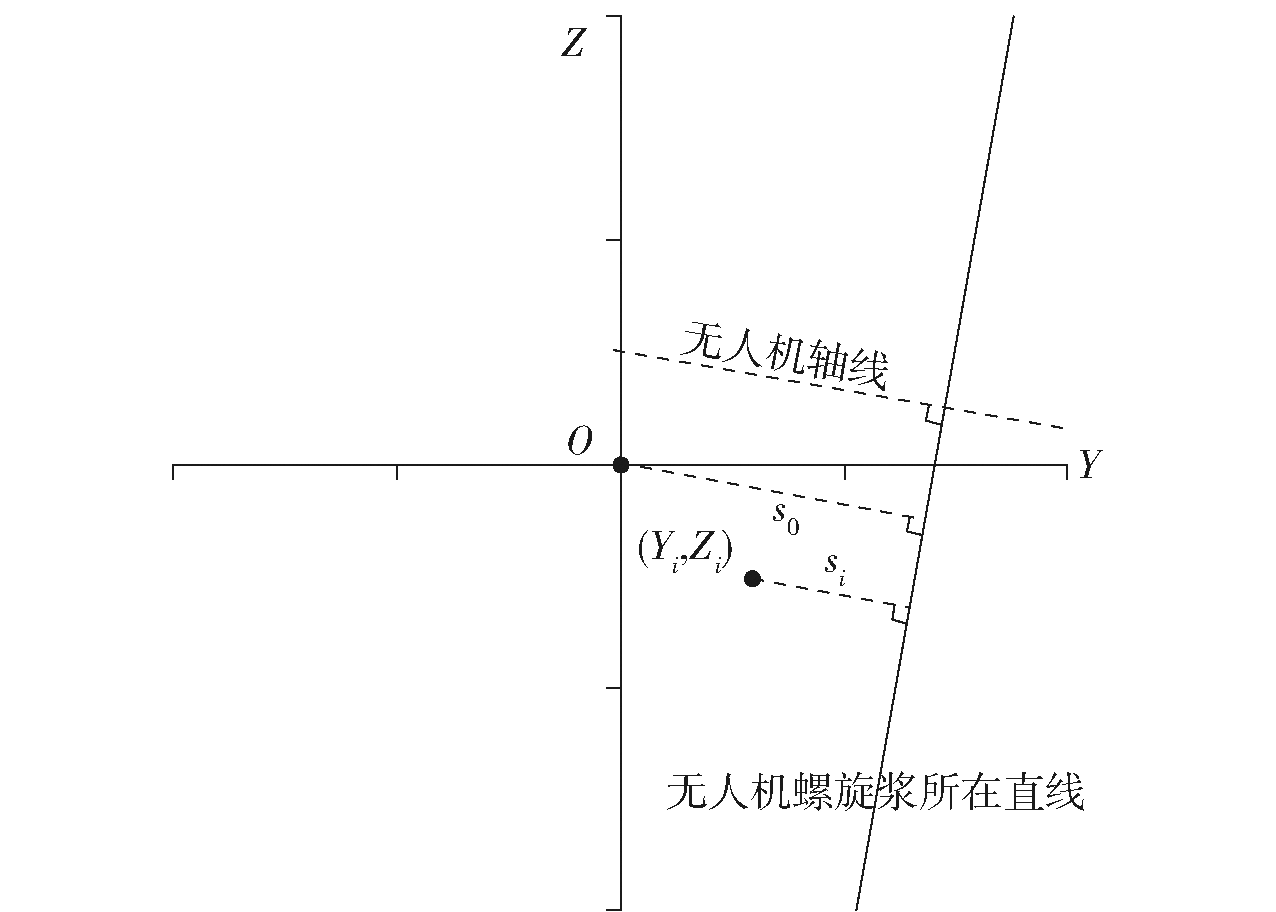
图12 助推机构坐标位置关系示意图
Fig.12 Schematic diagram of booster coordinate position relationship
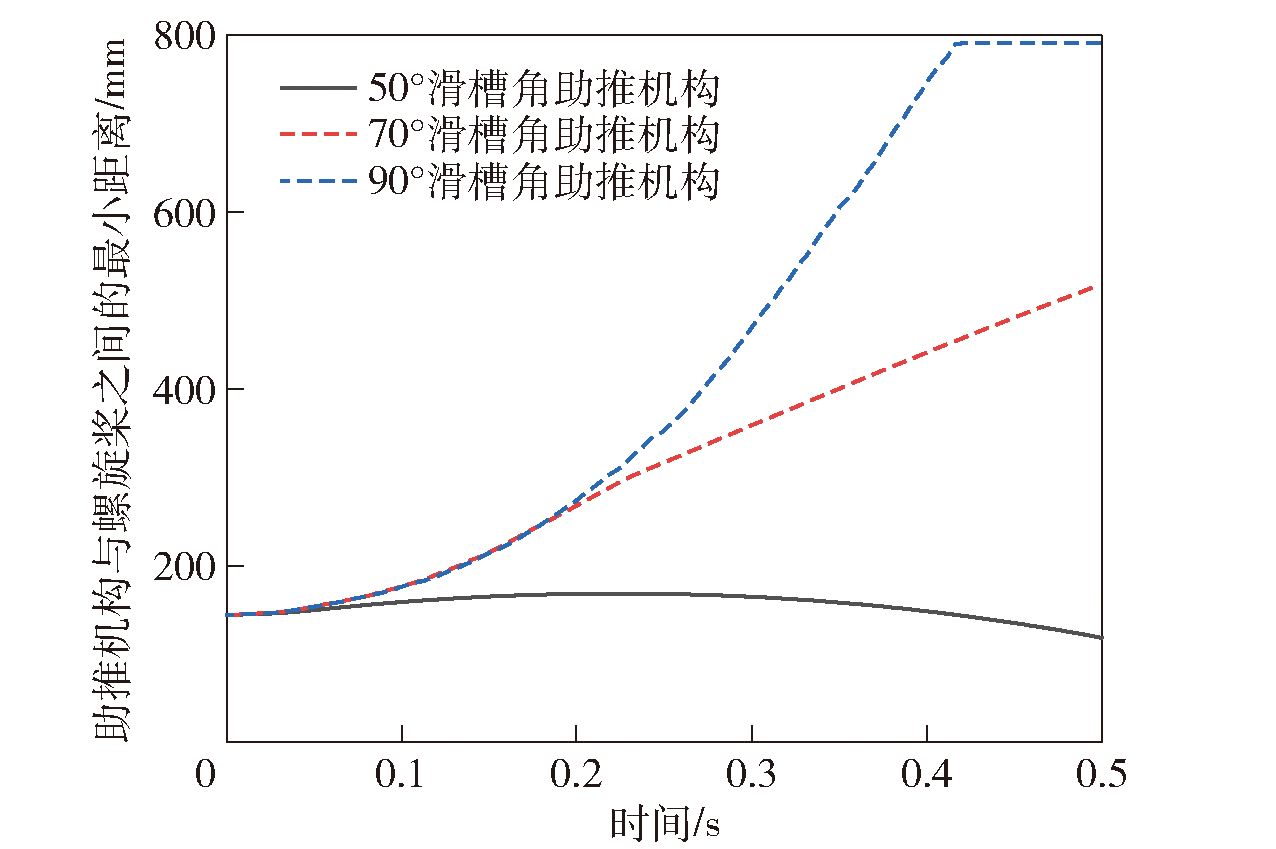
图13 助推机构到螺旋桨最小距离随时间变化曲线
Fig.13 Curves of minimum distance between booster and propeller over time

图14 助推机构实验模型
Fig.14 Booster experimental model
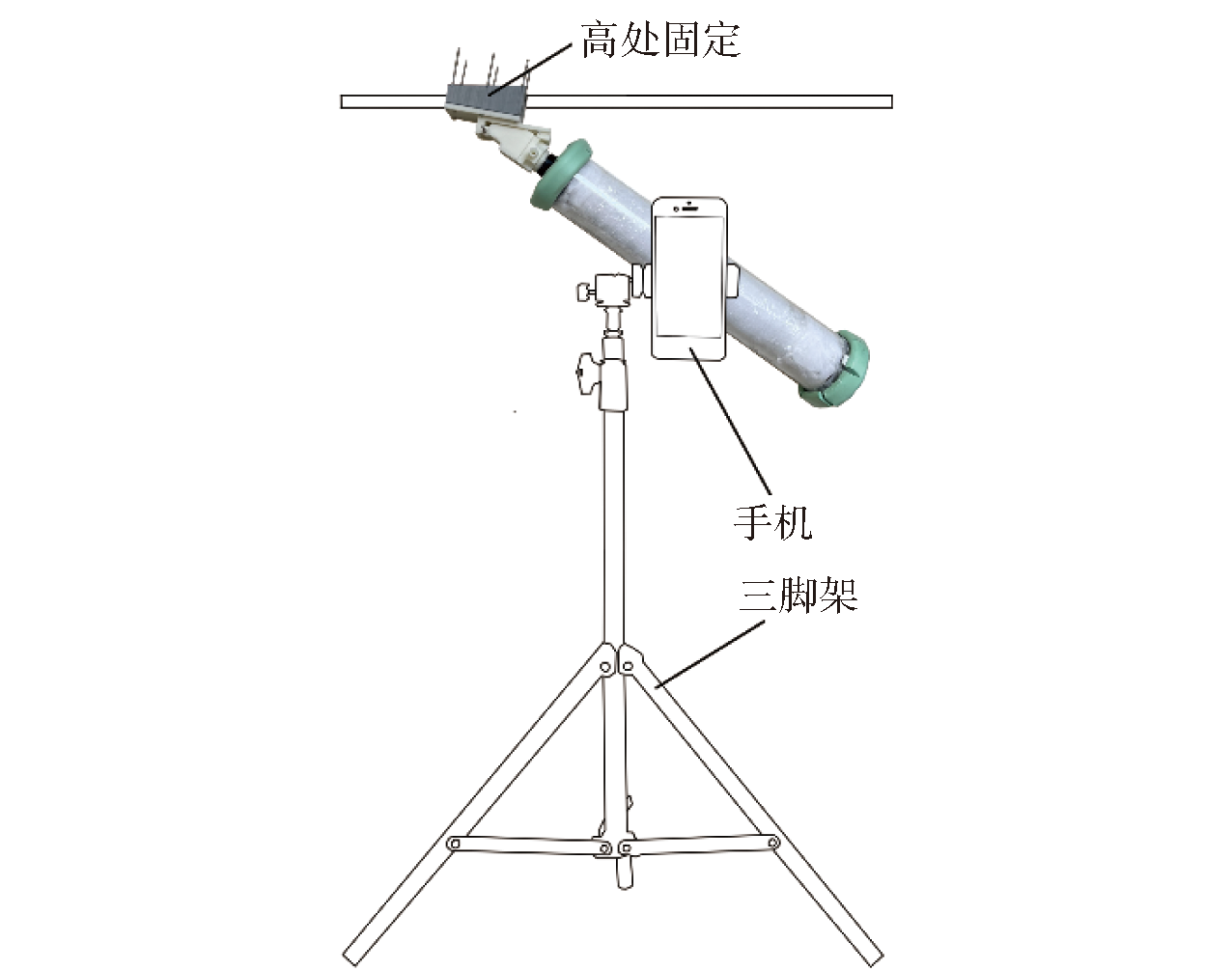
图15 实验系统示意图
Fig.15 Schematic diagram of experimental system
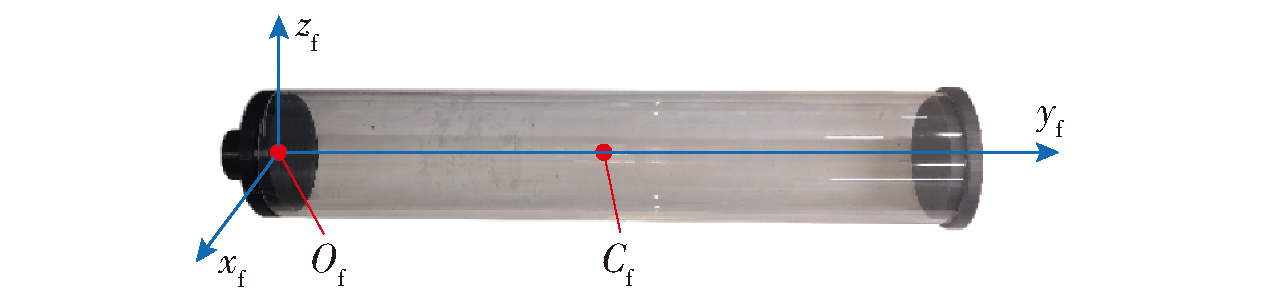
图16 助推发动机坐标系
Fig.16 Coordinate system of booster engine
| 助推发动机相关参数 | 数值 |
|---|---|
| 质量/kg | 6.0±0.1 |
| 质心距离 /mm | 322.6 |
| 质心赤道转动惯量Ixc/(kg·mm2) | 80445.0 |
| 质心赤道转动惯量Izc/(kg·mm2) | 80445.1 |
| 质心极转动惯量Iyc/(kg·mm2) | 3701.0 |
表3 实验模型数据
Table 3 Experimental model data
| 助推发动机相关参数 | 数值 |
|---|---|
| 质量/kg | 6.0±0.1 |
| 质心距离 /mm | 322.6 |
| 质心赤道转动惯量Ixc/(kg·mm2) | 80445.0 |
| 质心赤道转动惯量Izc/(kg·mm2) | 80445.1 |
| 质心极转动惯量Iyc/(kg·mm2) | 3701.0 |

图17 实验模型分离轨迹
Fig.17 Separation trajectories of experimental model
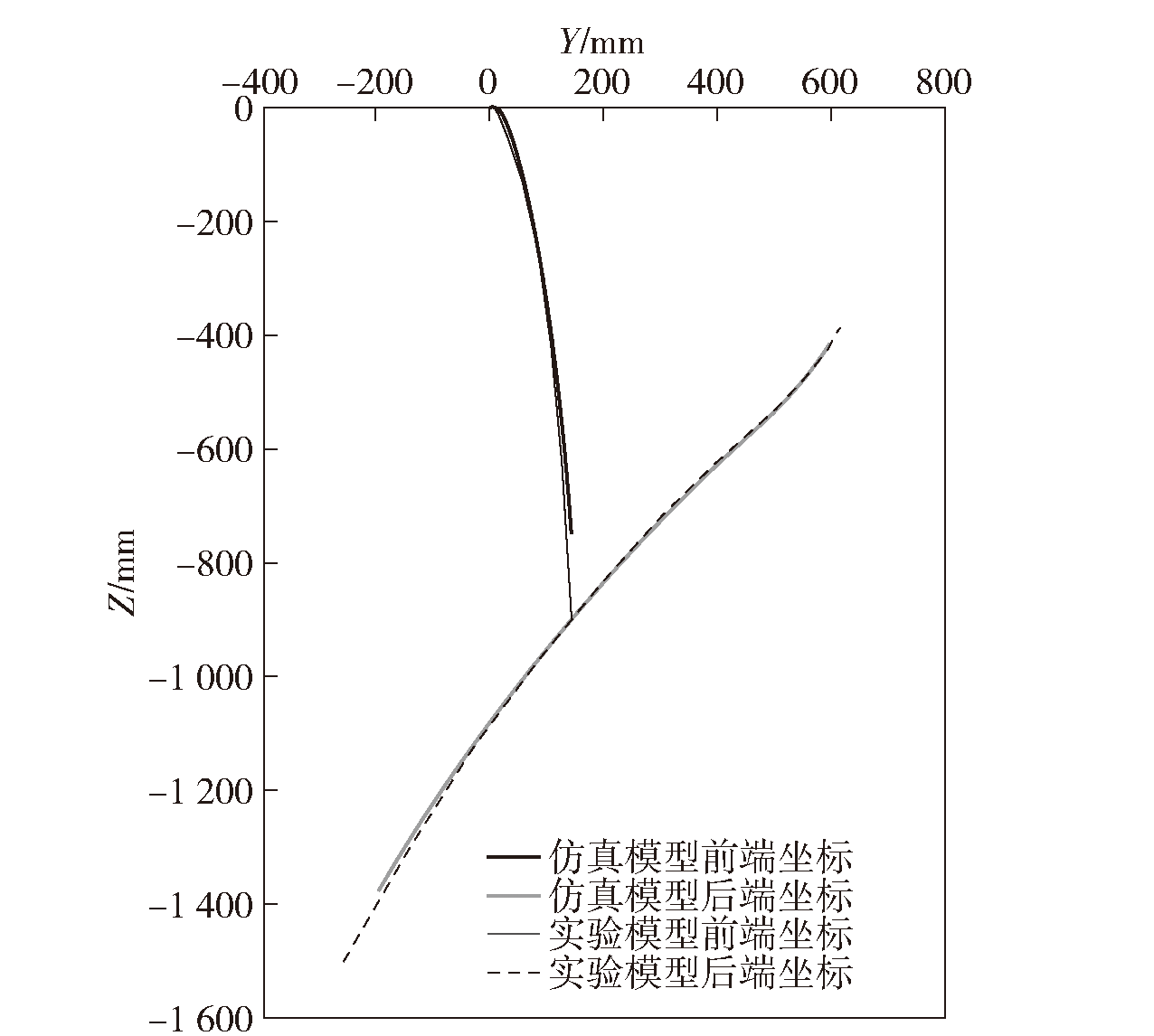
图18 助推机构实验模型和仿真模型坐标对比
Fig.18 Coordinate comparison between experimental model and simulation model
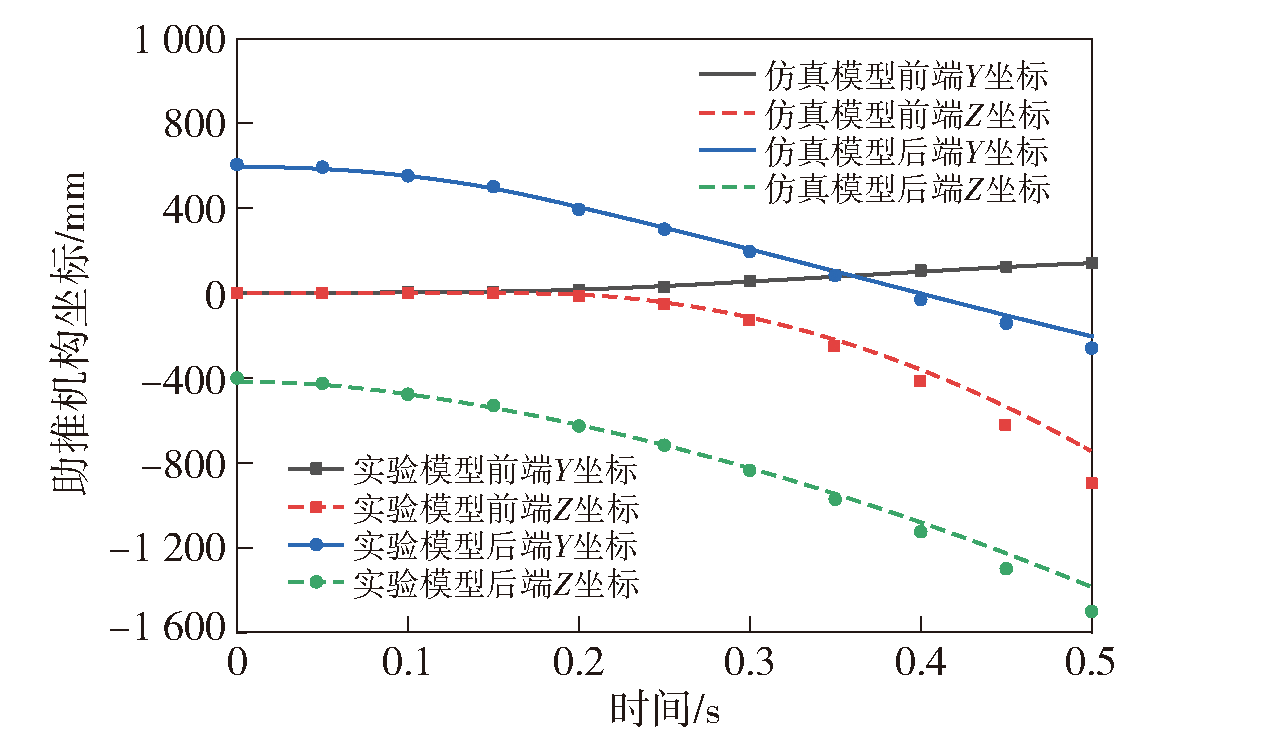
图19 助推机构前端和后端坐标-时间曲线
Fig.19 Front-end and back-end coordinates of booster-time curves
| 前后端坐标 差值 | 时间/s | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.05 | 0.10 | 0.15 | 0.20 | 0.25 | 0.30 | 0.35 | 0.40 | 0.45 | 0.50 | |
| 前端Y坐标差值/mm | 0 | 1.24 | 2.69 | 0.06 | -2.78 | -4.72 | 1.00 | 5.64 | 5.05 | 1.85 | 0.45 |
| 前端Z坐标差值/mm | 0 | -0.71 | -1.38 | -1.37 | -7.27 | -7.55 | -15.16 | -33.69 | -58.43 | -88.34 | -150.11 |
| 后端Y坐标差值/mm | 10.85 | 8.45 | 0.26 | 8.88 | -11.01 | -6.94 | -11.45 | -19.43 | -29.26 | -37.43 | -55.77 |
| 后端Z坐标差值/mm | 17.24 | 7.31 | -0.08 | 11.11 | -5.01 | -0.51 | -10.05 | -25.63 | -44.50 | -72.55 | -114.53 |
表4 助推机构前后端坐标差值
Table 4 Difference between the coordinates of front-end and back-end of booster
| 前后端坐标 差值 | 时间/s | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 0 | 0.05 | 0.10 | 0.15 | 0.20 | 0.25 | 0.30 | 0.35 | 0.40 | 0.45 | 0.50 | |
| 前端Y坐标差值/mm | 0 | 1.24 | 2.69 | 0.06 | -2.78 | -4.72 | 1.00 | 5.64 | 5.05 | 1.85 | 0.45 |
| 前端Z坐标差值/mm | 0 | -0.71 | -1.38 | -1.37 | -7.27 | -7.55 | -15.16 | -33.69 | -58.43 | -88.34 | -150.11 |
| 后端Y坐标差值/mm | 10.85 | 8.45 | 0.26 | 8.88 | -11.01 | -6.94 | -11.45 | -19.43 | -29.26 | -37.43 | -55.77 |
| 后端Z坐标差值/mm | 17.24 | 7.31 | -0.08 | 11.11 | -5.01 | -0.51 | -10.05 | -25.63 | -44.50 | -72.55 | -114.53 |
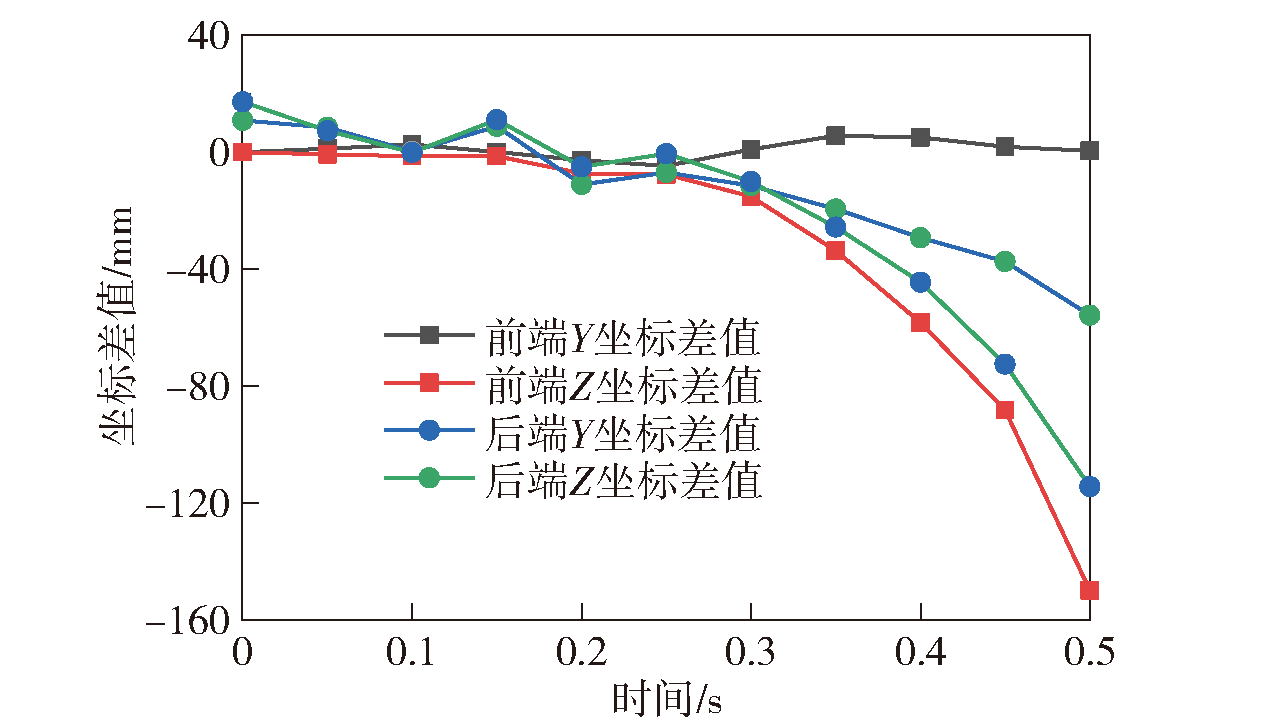
图20 助推机构前后端坐标差值-时间曲线
Fig.20 Coordinate difference between booster front-end and back-end-time curvs
| [1] |
于存贵, 李志刚. 火箭发射系统分析[M]. 北京: 国防工业出版社, 2012.
|
|
|
|
| [2] |
张琳, 龚喜盈, 张晓辉. 火箭助推零长发射建模仿真研究[J]. 火力与指挥控制, 2019, 44(8):150-154.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
姚琳, 王晓东. 无人机助推起飞过程影响因素敏感度分析[J]. 兵器装备工程学报, 2020, 41(10):81-85.
|
|
|
|
| [6] |
刘付平, 郑耀, 谢芳芳, 等. 助推火箭安装偏差对小型无人机发射安全的影响[J]. 哈尔滨工程大学学报, 2018, 39(8):1343-1348.
|
|
|
|
| [7] |
陶于金. 小型固定翼无人机零长发射参数安全边界研究[J]. 海军航空工程学院学报, 2017, 32(5):447-451,468.
|
|
|
|
| [8] |
王晓东, 夏杨, 涂金岽. 一种无人机火箭助推器脱落导向结构: CN211281514U[P]. 2020-08-18.
|
|
|
|
| [9] |
陈刚. 无人机单(双)火箭助推发射安全性对比分析[J]. 四川兵工学报, 2021, 42(8): 27-32.
|
|
|
|
| [10] |
|
| [11] |
doi: 10.1016/j.apm.2023.03.030 URL |
| [12] |
乐文超, 朱晓, 宁月敏, 等. 基于fmincon的扭杆悬架弹簧优化设计[J]. 上海汽车, 2018(6): 13-18.
|
|
|
|
| [13] |
doi: 10.1016/j.ijmecsci.2022.107771 URL |
| [14] |
doi: 10.1016/j.vehcom.2023.100600 URL |
| [15] |
doi: 10.1016/j.ast.2023.108257 URL |
| [16] |
王盼, 吴昊, 梁宇, 等. 轻型无人机起落架设计与强度分析[J]. 兵工学报, 2022, 43(增刊1):140-145.
|
|
doi: 10.12382/bgxb.2022.A023 |
|
| [17] |
doi: 10.1016/j.mechmachtheory.2020.104140 URL |
| [18] |
doi: 10.1016/j.ast.2023.108156 URL |
| [19] |
doi: 10.1016/j.ast.2023.108253 URL |
| [20] |
doi: 10.1016/j.ast.2022.108063 URL |
| [1] | 禹志龙, 李颖晖, 裴彬彬, 徐文丰, 段效聪, 宋可鑫. 具有飞行包线限制的飞翼无人机鲁棒自适应容错姿态控制[J]. 兵工学报, 2024, 45(1): 231-240. |
| [2] | 郭志明, 娄文忠, 李涛, 张梦宇, 白子龙, 乔虎. 基于改进蝗虫优化算法考虑任务威胁的多无人机协同航迹规划[J]. 兵工学报, 2023, 44(S2): 52-60. |
| [3] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [4] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [5] | 曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166. |
| [6] | 赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696. |
| [7] | 李曾琳, 李波, 白双霞, 孟波波. 基于AM-SAC的无人机自主空战决策[J]. 兵工学报, 2023, 44(9): 2849-2858. |
| [8] | 李思琪, 龚鹏, 单丹, 李剑锋, 刘宇, 高翔. 基于QualNet的无人机信息攻击半实物测试架构设计与实现[J]. 兵工学报, 2023, 44(9): 2709-2721. |
| [9] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [10] | 曹严, 龙腾, 孙景亮, 周禹泽. 信息重传与丢包补偿的多无人机分布式任务分配方法[J]. 兵工学报, 2023, 44(9): 2697-2708. |
| [11] | 刘兴宇, 郭荣化, 任成才, 闫超, 常远, 周晗, 相晓嘉. 基于身份匈牙利算法的无人机蜂群分布式目标分配方法[J]. 兵工学报, 2023, 44(9): 2824-2835. |
| [12] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [13] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [14] | 宫远强, 张业鹏, 马万鹏, 薛霄. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9): 2661-2671. |
| [15] | 李军, 陈士超. 无人机蜂群关键技术发展综述[J]. 兵工学报, 2023, 44(9): 2533-2545. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4