
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (9): 2709-2721.doi: 10.12382/bgxb.2022.1216
所属专题: 智能系统与装备技术
李思琪1, 龚鹏1, 单丹1,2, 李剑锋1, 刘宇1, 高翔1,*( )
)
收稿日期:2022-12-05
上线日期:2023-01-09
通讯作者:
基金资助:
LI Siqi1, GONG Peng1, SHAN Dan1,2, LI Jianfeng1, LIU Yu1, GAO Xiang1,*()
Received:2022-12-05
Online:2023-01-09
摘要:
针对无人机技术研究中对其数据链路干扰攻击效果进行仿真模拟的需求,基于QualNet仿真软件提出一种无人机信息攻击半实物测试架构。该半实物测试架构通过设计和集成通信网络仿真模块、想定规划模块、干扰攻击模拟加载模块、三维态势展示模块、动态控制模块和数据传输接口,来模拟实现对无人机的动态控制、状态信息显示及干扰攻击加载等。测试结果表明,该架构能够有效实现对无人机干扰攻击效果的模拟,且所设计的数据传输接口能够保证半实物测试中信息交互的准确性与实时性,为实物设备接入测试奠定了基础。
中图分类号:
李思琪, 龚鹏, 单丹, 李剑锋, 刘宇, 高翔. 基于QualNet的无人机信息攻击半实物测试架构设计与实现[J]. 兵工学报, 2023, 44(9): 2709-2721.
LI Siqi, GONG Peng, SHAN Dan, LI Jianfeng, LIU Yu, GAO Xiang. Design and Implementation of Hardware-in-the-loop Test Architecture for UAV Information Attack Based on QualNet[J]. Acta Armamentarii, 2023, 44(9): 2709-2721.
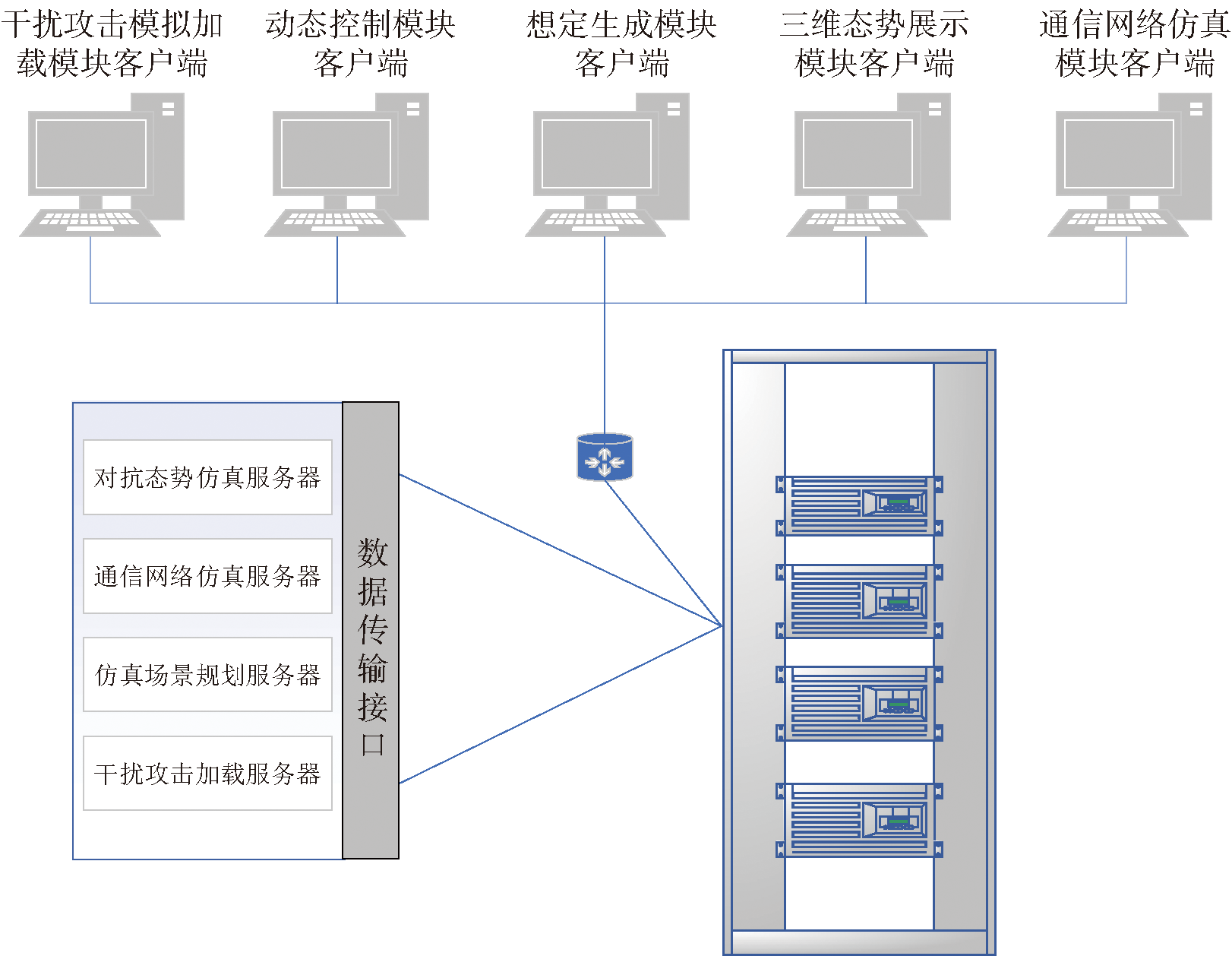
图1 无人机信息攻击的半实物测试架构
Fig.1 Hardware-in-the-loop test architecture for UAV information attack
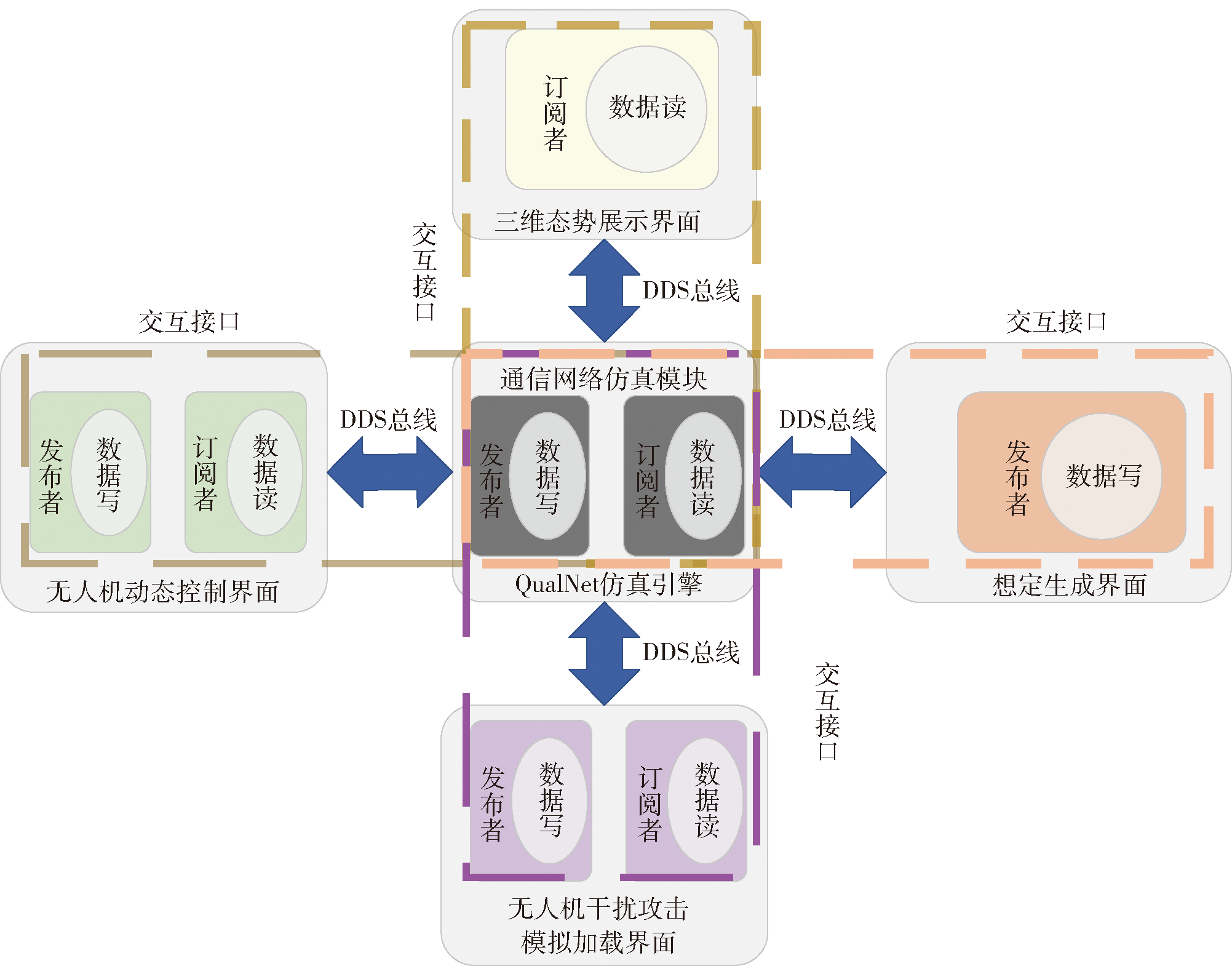
图2 无人机数据传输接口的框架
Fig.2 Framework of the UAV data transmission interface
| 功能 | 交互数据 | 发送端 | 接收端 |
|---|---|---|---|
| 遥控参数设置 | 遥控数据 | 动态控制模块发布者 | QualNet网络仿真软件订阅者 |
| 遥测数据获取 | 遥测数据 | QualNet网络仿真软件发布者 | 动态控制模块订阅者 |
| 三维态势展示 | 态势数据 | QualNet网络仿真软件发布者 | 三维态势展示模块订阅者 |
| 通信参数应答 | 通信参数数据 | QualNet网络仿真软件发布者 | 动态控制模块订阅者、干扰攻击模拟加载模块订阅者 |
| 干扰参数设置 | 干扰参数数据 | 干扰攻击模拟加载模块发布者 | QualNet网络仿真软件订阅者 |
| 干扰参数应答 | 干扰参数数据 | QualNet网络仿真软件发布者 | 干扰攻击模拟加载模块订阅者 |
| 仿真初始化 | 仿真场景参数数据 | 想定规划模块发布者 | QualNet网络仿真软件订阅者 |
表1 无人机数据传输接口数据交互关系
Table 1 UAV data transmission interface data interaction relationship
| 功能 | 交互数据 | 发送端 | 接收端 |
|---|---|---|---|
| 遥控参数设置 | 遥控数据 | 动态控制模块发布者 | QualNet网络仿真软件订阅者 |
| 遥测数据获取 | 遥测数据 | QualNet网络仿真软件发布者 | 动态控制模块订阅者 |
| 三维态势展示 | 态势数据 | QualNet网络仿真软件发布者 | 三维态势展示模块订阅者 |
| 通信参数应答 | 通信参数数据 | QualNet网络仿真软件发布者 | 动态控制模块订阅者、干扰攻击模拟加载模块订阅者 |
| 干扰参数设置 | 干扰参数数据 | 干扰攻击模拟加载模块发布者 | QualNet网络仿真软件订阅者 |
| 干扰参数应答 | 干扰参数数据 | QualNet网络仿真软件发布者 | 干扰攻击模拟加载模块订阅者 |
| 仿真初始化 | 仿真场景参数数据 | 想定规划模块发布者 | QualNet网络仿真软件订阅者 |
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| srcnodeID | unsignedShort | 发送遥控数据节点号 |
| destnodeID | unsignedShort | 接收遥控数据节点号 |
| HFlyMode | unsignedShort | 水平飞行方式(0、1、2取值分别代表无、左盘旋、右盘旋) |
| VFlyMode | unsignedShort | 垂直飞行方式(0、1、2、3取值分别代表无、爬升、下降、降落) |
表2 KjRemoteControl结构体的具体说明
Table 2 Specific description of the KjRemoteControl structure
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| srcnodeID | unsignedShort | 发送遥控数据节点号 |
| destnodeID | unsignedShort | 接收遥控数据节点号 |
| HFlyMode | unsignedShort | 水平飞行方式(0、1、2取值分别代表无、左盘旋、右盘旋) |
| VFlyMode | unsignedShort | 垂直飞行方式(0、1、2、3取值分别代表无、爬升、下降、降落) |
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| nodeID | unsignedShort | 干扰机节点的节点号 |
| active | unsignedShort | 干扰机工作状态(0、1取值分别代表关机、开机) |
| txPower | float | 干扰功率 |
| gain | float | 天线增益 |
| jammerMode | unsignedShort | 干扰模式 |
| startFrequency | double | 干扰开始频率 |
| endFrequency | double | 干扰结束频率 |
| HStartAngle | double | 干扰波束水平起始角度 |
| HEndAngle | double | 干扰波束水平终止角度 |
| VStartAngle | double | 干扰波束垂直起始角度 |
| VEndAngle | double | 干扰波束垂直终止角度 |
| signalMode | unsignedShort | 接管控制指令(0、1、2、3取值分别代表左盘旋、右盘旋、俯冲、停车) |
表3 UavJammerData结构体的具体说明
Table 3 Specific description of the UavJammerData structure
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| nodeID | unsignedShort | 干扰机节点的节点号 |
| active | unsignedShort | 干扰机工作状态(0、1取值分别代表关机、开机) |
| txPower | float | 干扰功率 |
| gain | float | 天线增益 |
| jammerMode | unsignedShort | 干扰模式 |
| startFrequency | double | 干扰开始频率 |
| endFrequency | double | 干扰结束频率 |
| HStartAngle | double | 干扰波束水平起始角度 |
| HEndAngle | double | 干扰波束水平终止角度 |
| VStartAngle | double | 干扰波束垂直起始角度 |
| VEndAngle | double | 干扰波束垂直终止角度 |
| signalMode | unsignedShort | 接管控制指令(0、1、2、3取值分别代表左盘旋、右盘旋、俯冲、停车) |
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| srcnodeId | unsignedShort | 发送遥测数据节点号 |
| destnodeId | unsignedShort | 接收遥测数据节点号 |
| synCode | unsignedShort | 同步码 |
| flightStatus | unsignedShort | 飞行状态 |
| pitchAngle | float | 俯仰角 |
| tiltAngle | float | 倾斜角 |
| airspeed | float | 空速 |
| longitude | double | 经度 |
| latitude | double | 纬度 |
| altitude | float | 海拔 |
| frequency | double | 频率 |
| bandwidth | long | 带宽 |
| txPower | float | 发送功率 |
| interFrameTime | long | 帧间时长 |
| slotDuration | long | 时隙长度 |
| numSlotsPerFrame | unsignedShort | 每帧时隙数 |
| guardTime | long | 保护间隔 |
| rxSensitivity | double | 接收灵敏度 |
表4 KjRemoteMeassure结构体的具体说明
Table 4 Specific description of the KjRemoteMeassure structure
| 变量名称 | 变量类型 | 变量说明 |
|---|---|---|
| srcnodeId | unsignedShort | 发送遥测数据节点号 |
| destnodeId | unsignedShort | 接收遥测数据节点号 |
| synCode | unsignedShort | 同步码 |
| flightStatus | unsignedShort | 飞行状态 |
| pitchAngle | float | 俯仰角 |
| tiltAngle | float | 倾斜角 |
| airspeed | float | 空速 |
| longitude | double | 经度 |
| latitude | double | 纬度 |
| altitude | float | 海拔 |
| frequency | double | 频率 |
| bandwidth | long | 带宽 |
| txPower | float | 发送功率 |
| interFrameTime | long | 帧间时长 |
| slotDuration | long | 时隙长度 |
| numSlotsPerFrame | unsignedShort | 每帧时隙数 |
| guardTime | long | 保护间隔 |
| rxSensitivity | double | 接收灵敏度 |
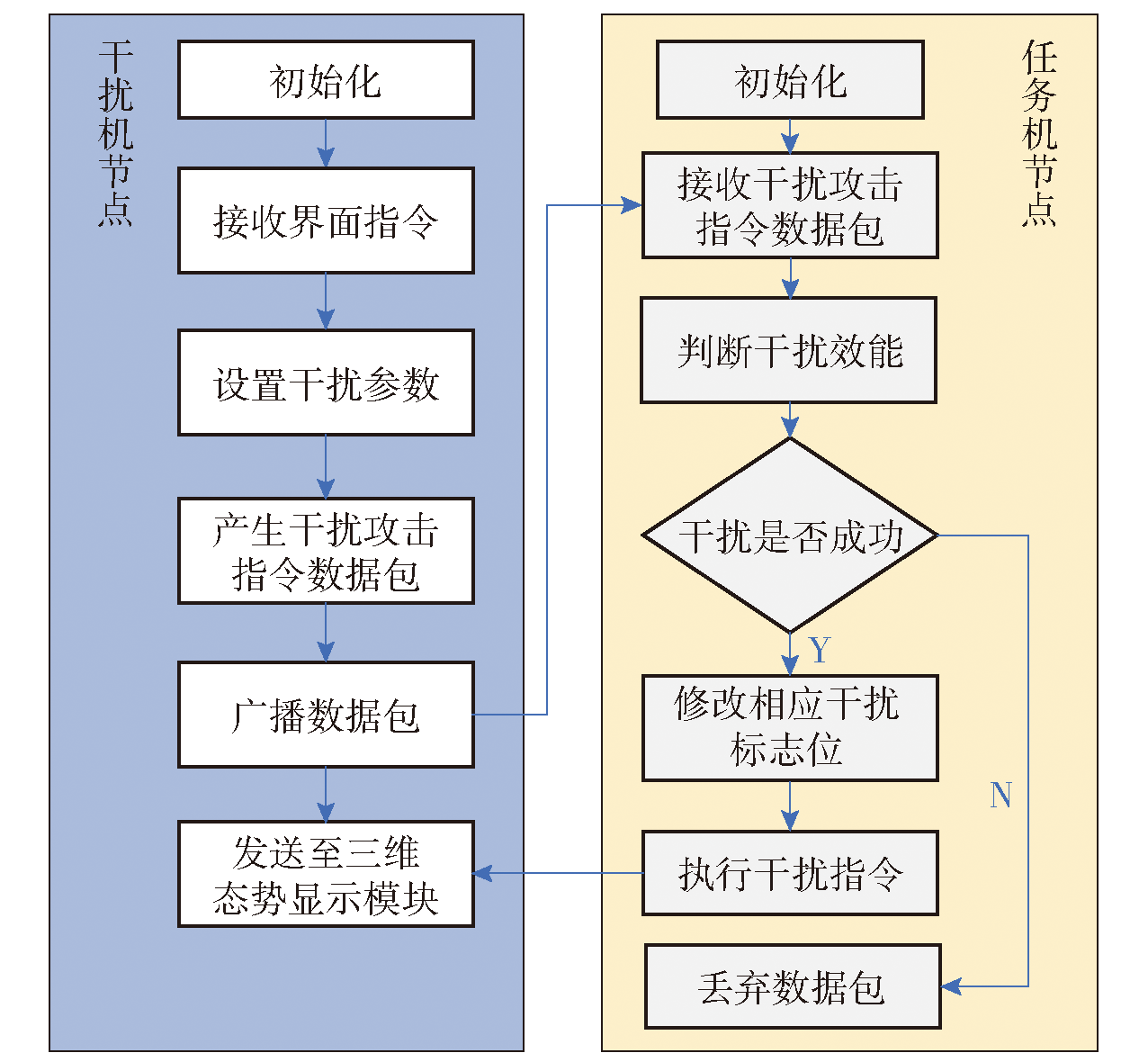
图3 干扰应用模型工作流程
Fig.3 Workflow of interference application model
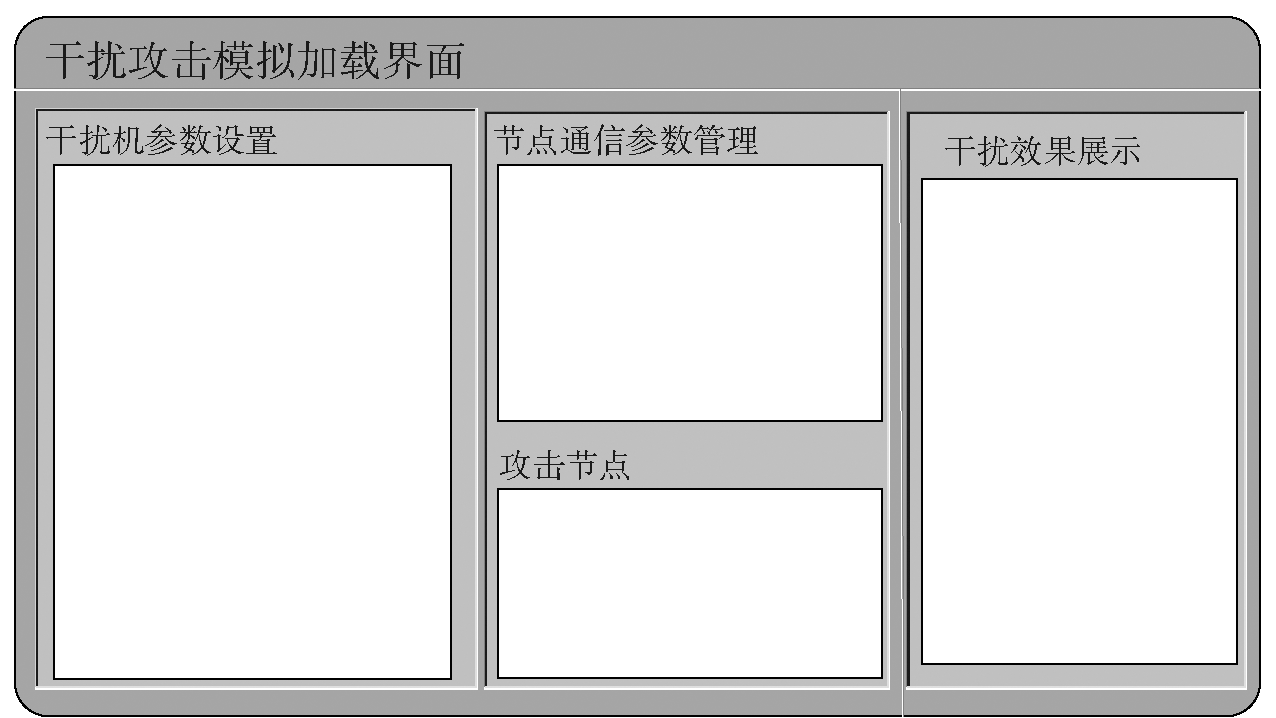
图4 干扰攻击模拟加载模块的界面框架图
Fig.4 Interface framework of jamming attack simulation loading module

图5 干扰攻击模拟加载模块的界面效果图
Fig.5 Interface rendering of jamming attack simulation loading module
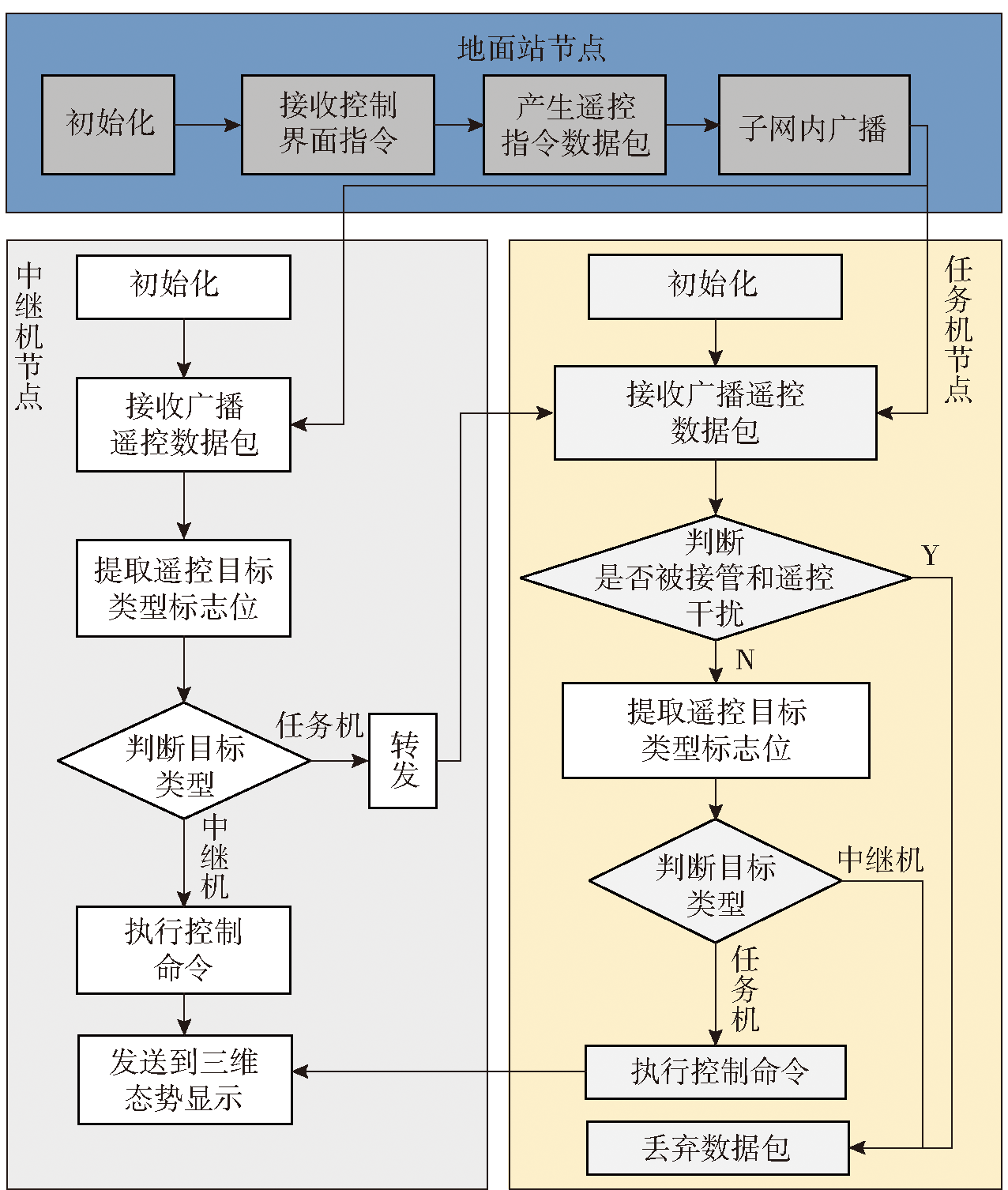
图6 遥控应用模型工作流程
Fig.6 Workflow of remote control application model

图7 遥测应用模型工作流程
Fig.7 Workflow of remote measurement application model

图8 动态控制模块的界面框架图
Fig.8 Interface framework of dynamic control module

图9 动态控制模块的界面效果图
Fig.9 Interface rendering of UAV dynamic control module

图10 基于QualNet的无人机信息攻击仿真场景配置
Fig.10 UAV information attack simulation scenario configuration based on QualNet
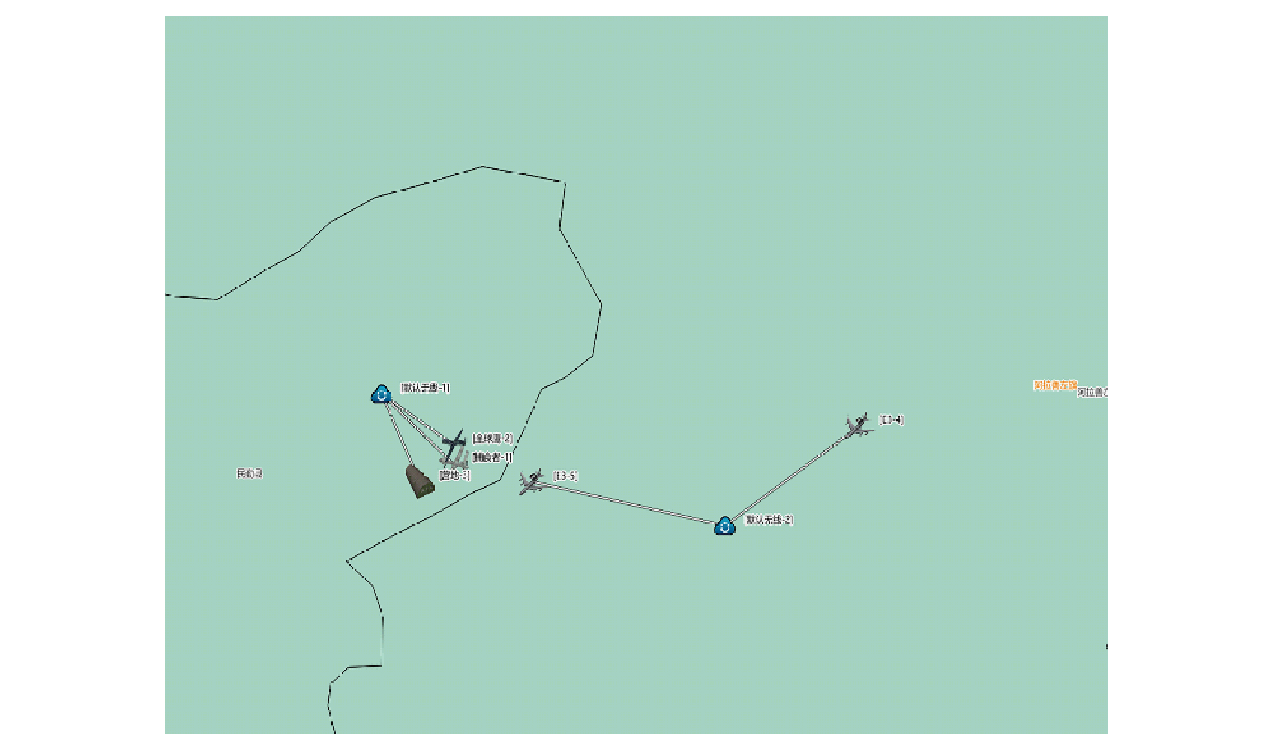
图11 仿真测试想定场景
Fig.11 Simulation test scenario

图12 遥测干扰开启前动态控制界面显示
Fig.12 Display of dynamic control interface before remote measurement jamming
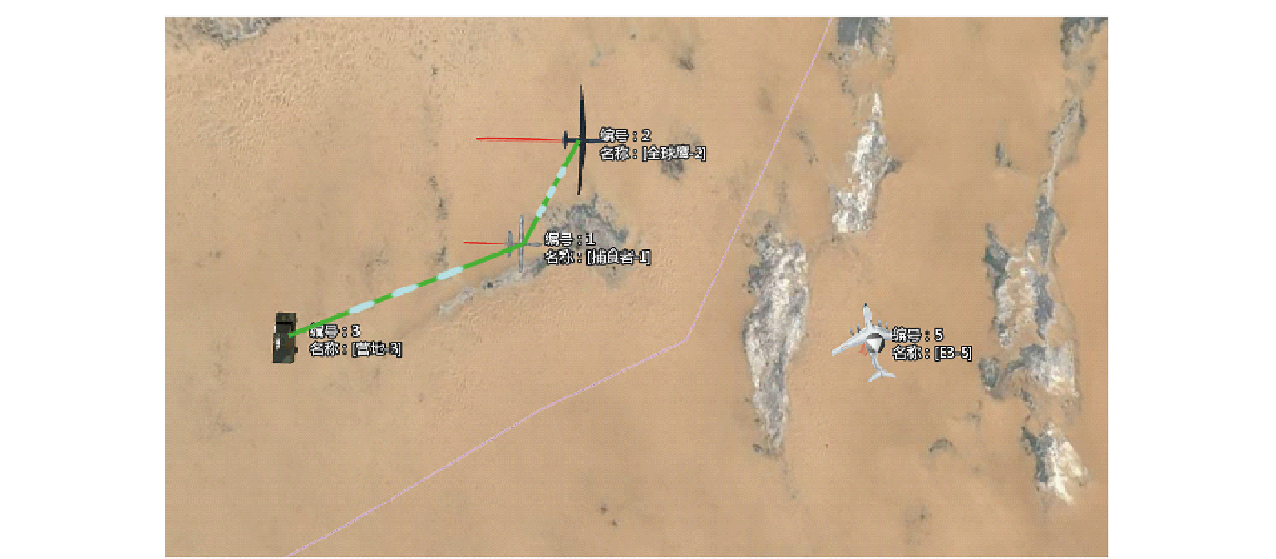
图13 遥测干扰开启前三维态势界面显示
Fig.13 Display of the three dimensional situation interface before remote measurement jamming

图14 遥测干扰开启
Fig.14 Remote measurement jamming On

图15 遥测干扰开启后动态控制界面显示
Fig.15 Display of dynamic control interface after remote measurement jamming is On

图16 遥测干扰开启后三维态势界面显示
Fig.16 Display of three dimensional situation interface after remote measurement jamming is On
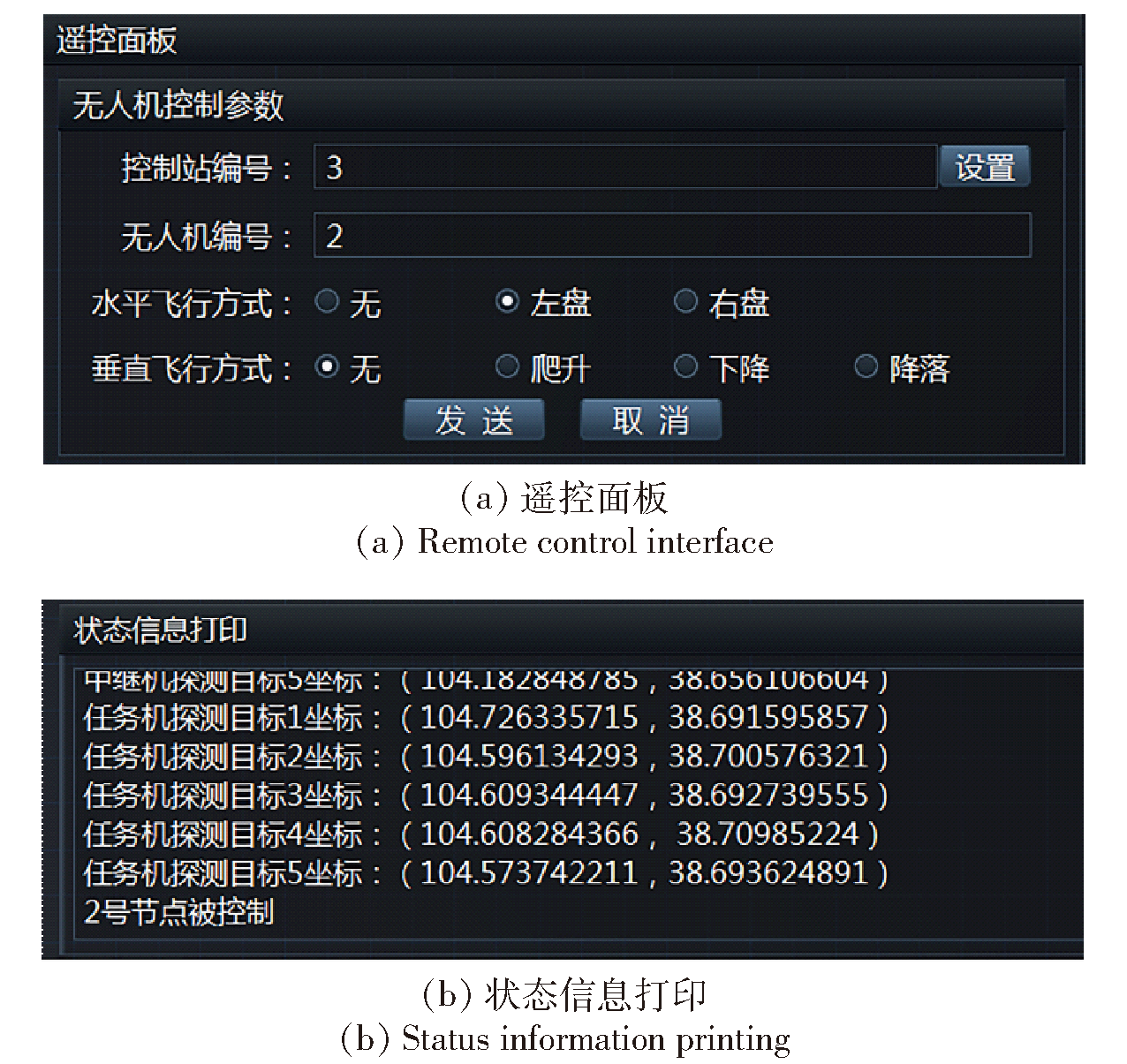
图17 遥控干扰开启前动态控制界面显示
Fig.17 Display of dynamic control interface before remote control jamming

图18 遥控干扰开启前三维态势界面显示
Fig.18 Display of three dimensional situation interface before remote control jamming

图19 遥控干扰开启
Fig.19 Remote control jamming On

图20 遥控干扰开启后动态控制界面显示
Fig.20 Display of dynamic control interface after remote control jamming is On

图21 遥控干扰开启后三维态势界面显示
Fig.21 Display of three dimensional situation panel after remote control jamming is On

图22 接管控制攻击开启
Fig.22 Takeover control attack On
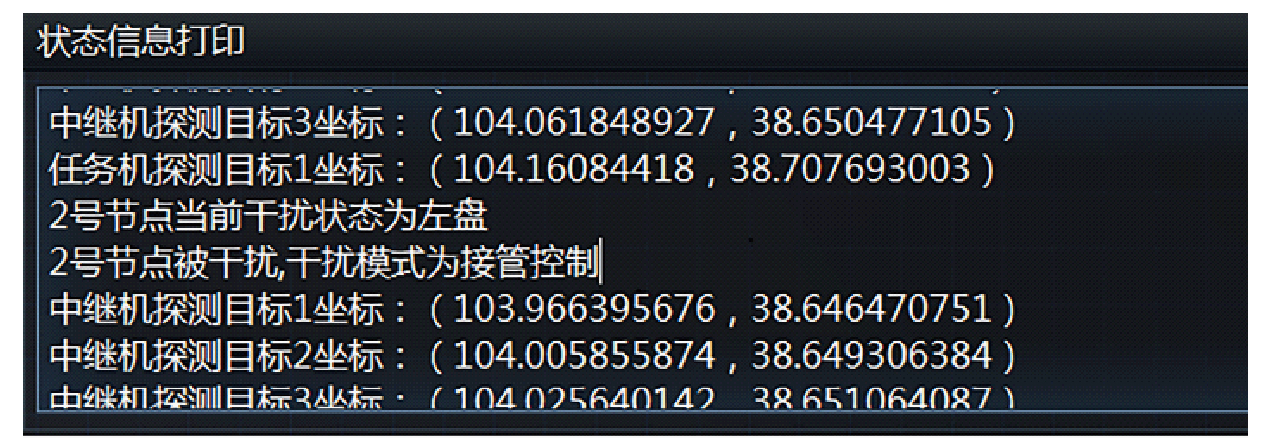
图23 动态控制界面状态信息打印窗口显示
Fig.23 Display of the status information printing window of dynamic control interface
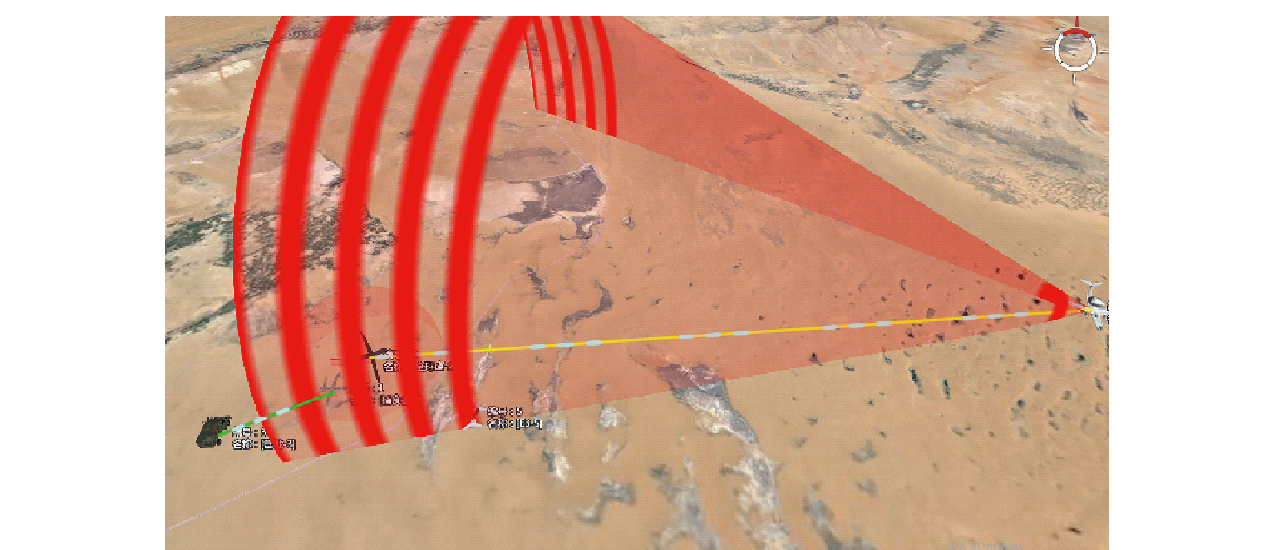
图24 接管控制攻击开启后三维态势界面显示
Fig.24 Display of three dimensional situation panel after takeover control attack is On
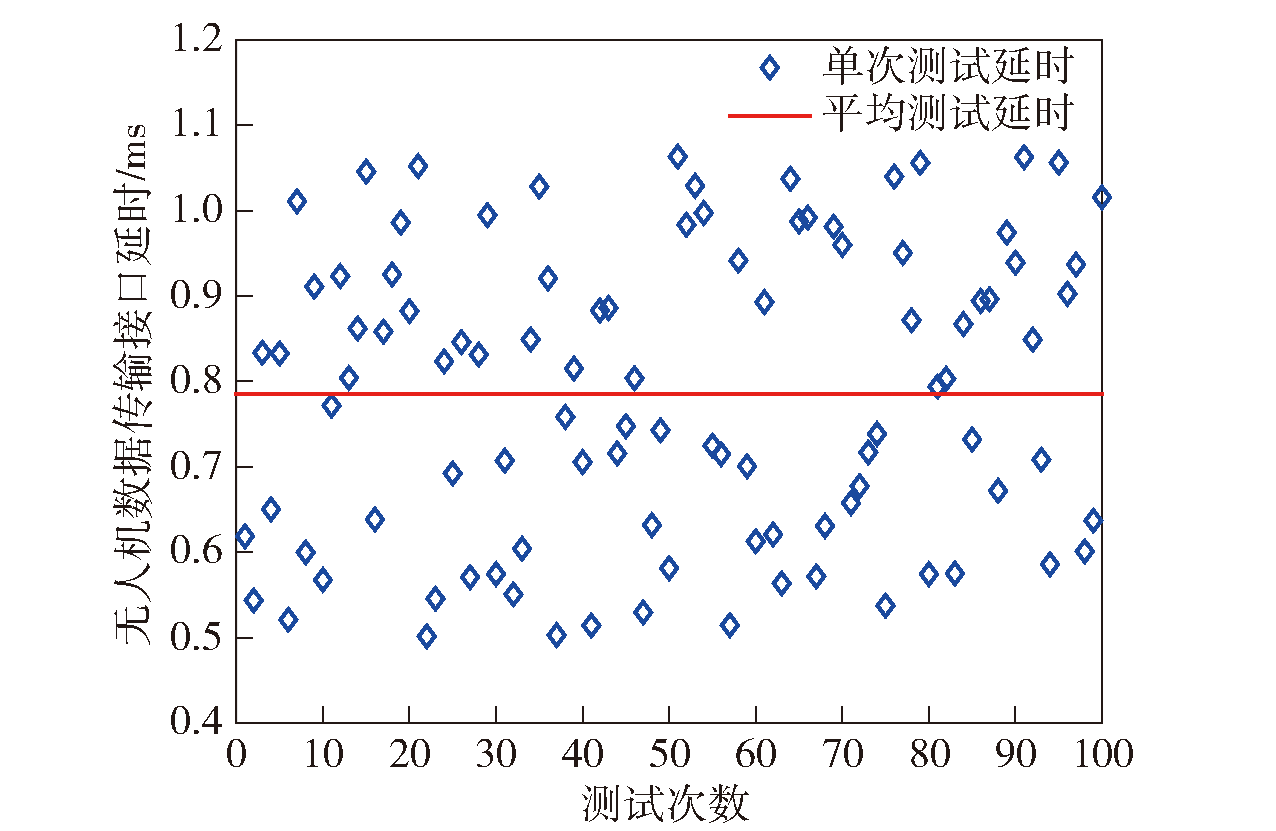
图25 无人机数据传输接口延时测试图
Fig.25 Delay test results of UAV data transmission interface
| [1] |
任媛媛, 高一栋, 焦慕卿. 无人机发展应用及反无手段研究[J]. 火控雷达技术, 2022, 51(1):27-32.
|
|
|
|
| [2] |
张晓杰, 郑纪彬, 苏涛, 等. 无人机集群协同搜索跟踪任务规划方法[J]. 雷达科学与技术, 2022, 20(5):480-491.
|
|
|
|
| [3] |
|
| [4] |
张羿山, 陈傲然, 王泽宇, 等. 基于城市运行的无人机路径规划研究[J]. 信息技术与信息化, 2022(5):182-186.
|
|
|
|
| [5] |
吴浩, 徐婧, 李刚. 无人机探测与反制技术发展现状及建议[J]. 飞航导弹, 2020(9):89-95.
|
|
|
|
| [6] |
牛余凯. 基于强化学习的小型无人机防御智能决策技术研究[D]. 北京: 军事科学院, 2021.
|
|
|
|
| [7] |
张哲聪, 唐碧蔚, 杨玉龙, 等. 基于无人机链路控制的抗干扰策略及干扰检测作战技术研究[J]. 电子技术与软件工程, 2020(23):28-30.
|
|
|
|
| [8] |
韩立园, 于林韬, 丛妍, 等. 基于OPNET的网络建模仿真分析[J]. 长春理工大学学报(自然科学版), 2019, 42(1):119-122.
|
|
|
|
| [9] |
蔡虔. 基于NS-2的无线自组织网络仿真实验设计[J]. 科技广场, 2015(5):107-111.
|
|
|
|
| [10] |
刘敏, 乔会东, 郎杰, 等. 基于QualNet的通信网络仿真研究[J]. 电子设计工程, 2014, 22(10):127-130.
|
|
|
|
| [11] |
杨宝庆, 马杰, 姚郁. 飞行器半实物仿真装备研究进展与展望[J]. 宇航学报, 2020, 41(6):657-665.
|
|
|
|
| [12] |
|
| [13] |
王召阳, 常家辉, 白子龙. 美军仿真技术及其应用现状分析[J]. 兵工自动化, 2021, 40(10):66-69.
|
|
|
|
| [14] |
|
| [15] |
doi: 10.1007/s13272-021-00509-7 |
| [16] |
黄瑞松, 李海凤, 刘金, 等. 飞行器半实物仿真技术现状与发展趋势分析[J]. 系统仿真学报, 2019, 31(9): 1763-1774.
doi: 10.16182/j.issn1004731x.joss.19-0373 |
|
|
|
| [17] |
王雪松. 飞行器姿态控制半实物仿真系统设计[D]. 哈尔滨: 哈尔滨工程大学, 2017.
|
|
|
|
| [18] |
朱煜良, 赵智全, 姚长虹, 等. 无人机通信干扰电磁环境半实物仿真系统[J]. 电讯技术, 2019, 59(4):476-481.
|
|
|
|
| [19] |
吕永玺, 屈晓波, 史静平. 无人机飞行控制半实物仿真系统设计与实现[J]. 实验技术与管理, 2021, 38(3):153-157.
|
|
|
|
| [20] |
龚鹏, 李思琪, 杨昊伟, 等.无人机信息攻击半实物测试系统及方法:中国. CN202210327523.1[P]. 2022-07-01.
|
|
|
|
| [21] |
李慧博, 吴海乔, 栗苹, 等. 基于VMware的Link11数据链半实物仿真技术[J]. 兵工学报, 2020, 41(增刊2):224-233.
|
|
|
| [1] | 周悦, 李壮壮, 郑然舜, 李军. 无人机火箭助推机构分离安全性研究[J]. 兵工学报, 2024, 45(1): 219-230. |
| [2] | 禹志龙, 李颖晖, 裴彬彬, 徐文丰, 段效聪, 宋可鑫. 具有飞行包线限制的飞翼无人机鲁棒自适应容错姿态控制[J]. 兵工学报, 2024, 45(1): 231-240. |
| [3] | 郭志明, 娄文忠, 李涛, 张梦宇, 白子龙, 乔虎. 基于改进蝗虫优化算法考虑任务威胁的多无人机协同航迹规划[J]. 兵工学报, 2023, 44(S2): 52-60. |
| [4] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [5] | 卢颖, 庞黎晨, 陈雨思, 宋婉莹, 傅妍芳. 一种面向城市战的无人机路径规划群智能算法[J]. 兵工学报, 2023, 44(S2): 146-156. |
| [6] | 曹正阳, 张冰, 白屹轩, 勾柯楠. GNSS/INS/VNS组合定位信息融合的多无人机协同导航方法[J]. 兵工学报, 2023, 44(S2): 157-166. |
| [7] | 赵军民, 何浩哲, 王少奇, 聂聪, 焦迎杰. 复杂环境下多无人机目标跟踪与避障联合航迹规划[J]. 兵工学报, 2023, 44(9): 2685-2696. |
| [8] | 李曾琳, 李波, 白双霞, 孟波波. 基于AM-SAC的无人机自主空战决策[J]. 兵工学报, 2023, 44(9): 2849-2858. |
| [9] | 黄峰, 王威雄, 林忠麟, 吴衔誉, 庄嘉权. 新型结构的四旋翼无人机视觉导航半物理仿真平台设计及试验[J]. 兵工学报, 2023, 44(9): 2836-2848. |
| [10] | 曹严, 龙腾, 孙景亮, 周禹泽. 信息重传与丢包补偿的多无人机分布式任务分配方法[J]. 兵工学报, 2023, 44(9): 2697-2708. |
| [11] | 刘兴宇, 郭荣化, 任成才, 闫超, 常远, 周晗, 相晓嘉. 基于身份匈牙利算法的无人机蜂群分布式目标分配方法[J]. 兵工学报, 2023, 44(9): 2824-2835. |
| [12] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [13] | 杨加秀, 李新凯, 张宏立, 王昊. 基于积分强化学习的四旋翼无人机鲁棒跟踪[J]. 兵工学报, 2023, 44(9): 2802-2813. |
| [14] | 宫远强, 张业鹏, 马万鹏, 薛霄. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9): 2661-2671. |
| [15] | 李军, 陈士超. 无人机蜂群关键技术发展综述[J]. 兵工学报, 2023, 44(9): 2533-2545. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4