
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (12): 4350-4363.doi: 10.12382/bgxb.2023.1091
丁习文1, 程宏昌1,2, 袁渊1,2, 苏悦1,*( )
)
收稿日期:2023-11-07
上线日期:2024-03-22
通讯作者:
DING Xiwen1, CHENG Hongchang1,2, YUAN Yuan1,2, SU Yue1,*()
Received:2023-11-07
Online:2024-03-22
摘要:
紫外像增强器视场瑕疵是影响器件成像效果的重要因素之一。针对视场瑕疵样本数量少和视场图像显示差异大的问题,采取相应的数据增强策略,并在单发多框检测(Single Shot multibox Detector,SSD)算法的基础上,添加特征金字塔网络(Feature Pyramid Network,FPN),以解决多尺度特征难以有效识别与融合的问题。同时引入卷积注意力模块(Convolutional Block Attention Module,CBAM)去进一步加强网络对小瑕疵目标信息的关注,并抑制噪声干扰。试验结果表明:在自建的数据集上,添加了FPN和CBAM的SSD(Feature Pyramid Network-Convolutional Block Attention Module-Single Shot Multibox Detector,FPN-CBAM-SSD)算法在视场瑕疵实际检测效果方面更优于SSD算法。对于亮点、暗斑、条纹状、亮斑和暗点这5类瑕疵,其平均精准度分别提高了19.76%、22.84%、29.56%、34.55%和38.14%。FPN-CBAM-SSD算法能够满足实际应用需求,适应更加复杂的视场情况,可视为一种有效的紫外像增强器视场瑕疵检测新型方法。
中图分类号:
丁习文, 程宏昌, 袁渊, 苏悦. 基于改进SSD算法的紫外像增强器视场瑕疵检测方法[J]. 兵工学报, 2024, 45(12): 4350-4363.
DING Xiwen, CHENG Hongchang, YUAN Yuan, SU Yue. Detection Method for Field-of-view Defect of Ultraviolet Image Intensifier Based on Improved SSD Algorithm[J]. Acta Armamentarii, 2024, 45(12): 4350-4363.
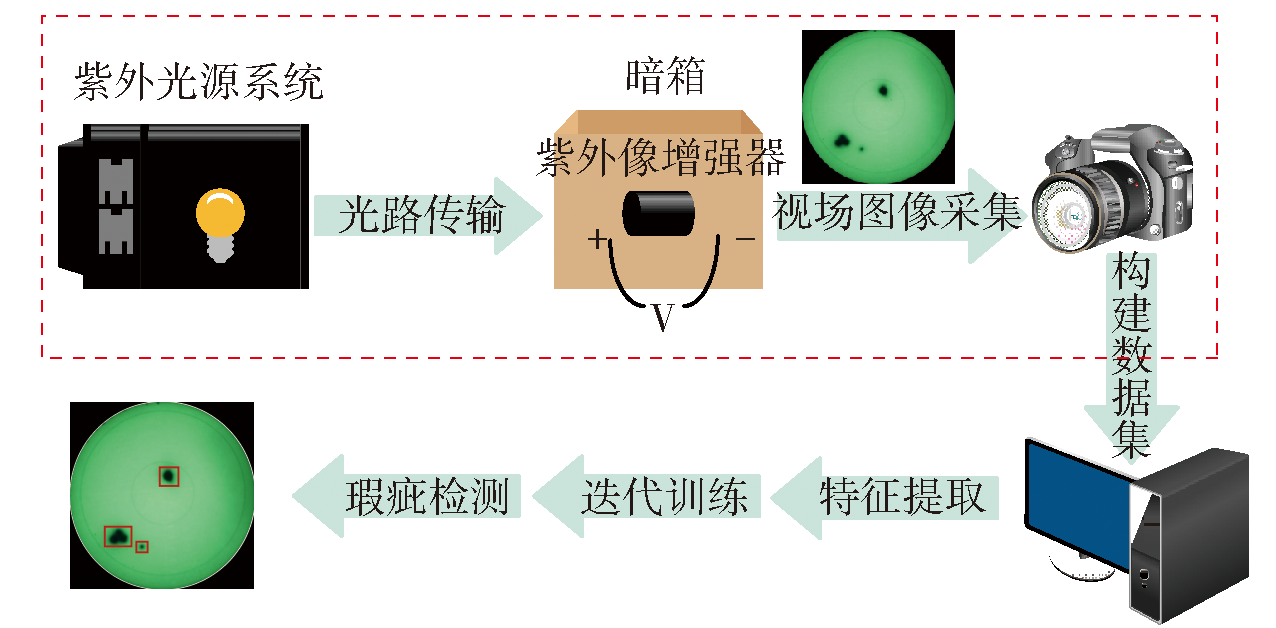
图1 紫外像增强器视场瑕疵检测实验整体流程
Fig.1 Overall flowchart of the UV image intensifier field-of-view defect detection experiment

图2 不同采集批次图像显示效果存在差异
Fig.2 Differences in the display effects of images from different acquisition batches

图3 图像数据增强示例效果
Fig.3 Example effect of image data enhancement

图4 紫外像增强器视场中主要类型瑕疵
Fig.4 Main types of defects in the field of view of UV image intensifier

图5 紫外像增强器视场瑕疵标注
Fig.5 Labeling of field of view defects of UV image intensifier

图6 视场中主要类型瑕疵数量大致占比情况
Fig.6 Approximate proportion of the number of major types of defects in the field of view

图7 SSD检测算法的结构示意图
Fig.7 Structure diagram of SSD detection algorithm

图8 数据集中的标注框尺寸及分布情况
Fig.8 Size and distribution of labeled boxes in the dataset

图9 不同检测框尺寸的检测结果
Fig.9 Detection results for different anchor-sizes

图10 特征金字塔网络示意图
Fig.10 Schematic diagram of feature pyramid network

图11 卷积注意力机制示意图
Fig.11 Schematic diagram of convolutional attention mechanisms

图12 FPN-CBAM-SSD算法结构示意图
Fig.12 Schematic diagram of the structure of FPN-CBAM-SSD algorithm
| 实验硬件配置 | 型号 | 生产厂家 | |
|---|---|---|---|
| 光源 | BM-Ⅰ No.1608 | 上海灯泡三厂 | |
| 外接电源 | GWLNSTEK GPP-4323 | 固纬电子(苏州)有限公司 | |
| 数码相机 | Canon DS126151 400D | 佳能(中国)有限公司 | |
| 计算机 | 处理器 | Intel(R) Core(TM) i5-12400 4.40GHz | 英特尔(中国)有限公司 |
| 显卡 | Nvidia GTX 3060 12GB | 技嘉科技股份有限公司 | |
表1 实验平台硬件环境配置情况
Table 1 Configuration of hardware environment of the experimental platform
| 实验硬件配置 | 型号 | 生产厂家 | |
|---|---|---|---|
| 光源 | BM-Ⅰ No.1608 | 上海灯泡三厂 | |
| 外接电源 | GWLNSTEK GPP-4323 | 固纬电子(苏州)有限公司 | |
| 数码相机 | Canon DS126151 400D | 佳能(中国)有限公司 | |
| 计算机 | 处理器 | Intel(R) Core(TM) i5-12400 4.40GHz | 英特尔(中国)有限公司 |
| 显卡 | Nvidia GTX 3060 12GB | 技嘉科技股份有限公司 | |
| 实验软件环境 | 具体版本号 |
|---|---|
| Python | 3.6 |
| CUDA | 11.3 |
| CuDnn | 8.4.1 |
表2 实验平台软件环境配置情况
Table 2 Configuration of software environment of the experimental platform
| 实验软件环境 | 具体版本号 |
|---|---|
| Python | 3.6 |
| CUDA | 11.3 |
| CuDnn | 8.4.1 |

图13 不同优化SSD算法的损失曲线
Fig.13 Loss trends of different improved SSD algorithms
| 算法 | 准确率/ % | 召回率/ % | F1分数/ % | mAP/% | mAP/ % | FPS/ (帧·s-1) | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| 暗点 | 亮点 | 暗斑 | 亮斑 | 条纹状 | ||||||
| SSD算法 | 90.0 | 14.3 | 23.2 | 22.97 | 43.05 | 48.57 | 42.12 | 27.07 | 36.76 | 70.90 |
| CBAM-SSD算法 | 87.6 | 26.4 | 40.5 | 32.80 | 46.12 | 60.58 | 53.42 | 36.89 | 45.96 | 63.53 |
| FPN-SSD算法 | 74.7 | 32.9 | 43.4 | 44.82 | 40.13 | 66.29 | 57.56 | 38.49 | 49.46 | 51.47 |
| FPN-CBAM-SSD算法 | 81.9 | 51.9 | 63.2 | 61.11 | 62.81 | 71.41 | 76.67 | 56.63 | 65.73 | 15.57 |
表3 消融试验性能指标对比
Table 3 Comparison of ablation test performance indexes
| 算法 | 准确率/ % | 召回率/ % | F1分数/ % | mAP/% | mAP/ % | FPS/ (帧·s-1) | ||||
|---|---|---|---|---|---|---|---|---|---|---|
| 暗点 | 亮点 | 暗斑 | 亮斑 | 条纹状 | ||||||
| SSD算法 | 90.0 | 14.3 | 23.2 | 22.97 | 43.05 | 48.57 | 42.12 | 27.07 | 36.76 | 70.90 |
| CBAM-SSD算法 | 87.6 | 26.4 | 40.5 | 32.80 | 46.12 | 60.58 | 53.42 | 36.89 | 45.96 | 63.53 |
| FPN-SSD算法 | 74.7 | 32.9 | 43.4 | 44.82 | 40.13 | 66.29 | 57.56 | 38.49 | 49.46 | 51.47 |
| FPN-CBAM-SSD算法 | 81.9 | 51.9 | 63.2 | 61.11 | 62.81 | 71.41 | 76.67 | 56.63 | 65.73 | 15.57 |
| 算法 | 平均精准度/% | mAP/ % | 参数量/ 106 | GFLOPS/ G | FPS/ (帧·s-1) | ||||
|---|---|---|---|---|---|---|---|---|---|
| 暗点 | 亮点 | 暗斑 | 亮斑 | 条纹状 | |||||
| SSD算法 | 22.97 | 43.05 | 48.57 | 42.12 | 27.07 | 36.76 | 24.15 | 61.14 | 70.90 |
| FPN-CBAM-SSD算法 | 61.11 | 62.81 | 71.41 | 76.67 | 56.63 | 65.73 | 30.83 | 66.13 | 15.57 |
| Faster-RCNN算法 | 18.54 | 23.53 | 72.85 | 61.16 | 42.84 | 43.78 | 136.77 | 369.82 | 11.92 |
| YOLOv5算法 | 31.41 | 23.40 | 32.04 | 32.79 | 25.46 | 29.02 | 7.07 | 16.51 | 102.19 |
| YOLOv8算法 | 31.84 | 25.25 | 36.72 | 34.62 | 27.79 | 31.25 | 11.14 | 28.66 | 96.11 |
表4 不同检测算法在自建紫外像增强器视场数据集上的性能对比
Table 4 Performance comparison of different detection algorithms on the self-built UV imageintensifier field of view dataset
| 算法 | 平均精准度/% | mAP/ % | 参数量/ 106 | GFLOPS/ G | FPS/ (帧·s-1) | ||||
|---|---|---|---|---|---|---|---|---|---|
| 暗点 | 亮点 | 暗斑 | 亮斑 | 条纹状 | |||||
| SSD算法 | 22.97 | 43.05 | 48.57 | 42.12 | 27.07 | 36.76 | 24.15 | 61.14 | 70.90 |
| FPN-CBAM-SSD算法 | 61.11 | 62.81 | 71.41 | 76.67 | 56.63 | 65.73 | 30.83 | 66.13 | 15.57 |
| Faster-RCNN算法 | 18.54 | 23.53 | 72.85 | 61.16 | 42.84 | 43.78 | 136.77 | 369.82 | 11.92 |
| YOLOv5算法 | 31.41 | 23.40 | 32.04 | 32.79 | 25.46 | 29.02 | 7.07 | 16.51 | 102.19 |
| YOLOv8算法 | 31.84 | 25.25 | 36.72 | 34.62 | 27.79 | 31.25 | 11.14 | 28.66 | 96.11 |
| 算法 | mAP/ % | 参数量/ 106 | GFLOPS/ 109 | FPS/ (帧·s-1) |
|---|---|---|---|---|
| SSD算法 | 79.24 | 26.15 | 62.65 | 46.38 |
| FPN-CBAM-SSD算法 | 83.63 | 31.77 | 66.83 | 13.96 |
| Faster-RCNN算法 | 78.46 | 137.08 | 370.19 | 7.19 |
| YOLOv5算法 | 77.12 | 7.12 | 16.64 | 101.41 |
| YOLOv8算法 | 81.61 | 11.14 | 28.69 | 93.94 |
表5 不同检测算法在VOC 07+12数据集上的 性能对比
Table 5 Performance comparison of different detection a lgorithms on VOC 07+12 dataset
| 算法 | mAP/ % | 参数量/ 106 | GFLOPS/ 109 | FPS/ (帧·s-1) |
|---|---|---|---|---|
| SSD算法 | 79.24 | 26.15 | 62.65 | 46.38 |
| FPN-CBAM-SSD算法 | 83.63 | 31.77 | 66.83 | 13.96 |
| Faster-RCNN算法 | 78.46 | 137.08 | 370.19 | 7.19 |
| YOLOv5算法 | 77.12 | 7.12 | 16.64 | 101.41 |
| YOLOv8算法 | 81.61 | 11.14 | 28.69 | 93.94 |

图14 典型情况下视场瑕疵检测结果的数据统计分析
Fig.14 Statistical analysis of data for detected results of field-of-view defects in typical cases

图15 复杂情况下视场瑕疵检测结果的数据统计分析
Fig.15 Statistical analysis of data for detected results of field-of-view defects in complex cases
| [1] |
石峰, 程宏昌, 闫磊, 等. 紫外探测技术[M]. 北京: 国防工业出版社, 2017:12.
|
|
|
|
| [2] |
向世明, 倪国强. 光电子成像器件原理[M]. 北京: 国防工业出版社,1999.
|
|
|
|
| [3] |
许强. 军用紫外探测技术及应用[M]. 北京: 北京航空航天大学出版社, 2010.
|
|
|
|
| [4] |
张忠廉, 刘榴娣. 紫外线技术在军事上的应用研究[J]. 光学技术, 2000, 26(4):289-293, 296.
|
|
|
|
| [5] |
杨杰. 紫外探测技术的应用与进展[J]. 光电子技术, 2011, 31(4):274-278.
|
|
|
|
| [6] |
张简屏, 常乐, 陈超, 等. 日盲紫外像增强器的研究现状及应用前景[J]. 云光技术, 2021, 53(2):68-74.
|
|
|
|
| [7] |
唐光华, 宋晓峰, 汪述猛, 等. 日盲型紫外像增强管的应用及研制进展[J]. 光电子技术, 2016, 36(3):164.
|
|
|
|
| [8] |
赵清波. 宽光谱像增强器辐射增益和视场缺陷测试技术研究[D]. 南京: 南京理工大学, 2008.
|
|
|
|
| [9] |
|
| [10] |
杨琦. 紫外像增强器视场缺陷检测技术研究[D]. 南京: 南京理工大学, 2011.
|
|
|
|
| [11] |
汤勃, 孔建益, 伍世虔. 机器视觉表面缺陷检测综述[J]. 中国图象图形学报, 2017, 22(12):1640-1663.
|
|
|
|
| [12] |
张涛, 刘玉婷, 杨亚宁, 等. 基于机器视觉的表面缺陷检测研究综述[J]. 科学技术与工程, 2020, 20(35):14366-14376.
|
|
|
|
| [13] |
顾佳晨, 高雷, 刘路硌. 基于深度学习的目标检测算法在冷轧表面缺陷检测中的应用[J]. 冶金自动化, 2019, 43(6): 19-22.
|
|
|
|
| [14] |
张良安, 陈洋, 谢胜龙, 等. 基于机器视觉与深度学习的飞机防护栅裂纹检测系统[J]. 兵工学报, 2023, 44(2):507-516.
doi: 10.12382/bgxb.2021.0674 |
|
doi: 10.12382/bgxb.2021.0674 |
|
| [15] |
郭永红, 牛海涛, 史超, 等. 基于卷积和注意力机制的小样本目标检测[J]. 兵工学报, 2023, 44(11):3508-3515.
doi: 10.12382/bgxb.2022.1167 |
|
doi: 10.12382/bgxb.2022.1167 |
|
| [16] |
景军锋, 刘娆. 基于卷积神经网络的织物表面缺陷分类方法[J]. 测控技术, 2018, 37(9): 20-25.
|
|
|
|
| [17] |
李文俊, 陈斌, 李建明, 等. 基于深度神经网络的表面划痕识别方法[J]. 计算机应用, 2019, 39(7):2103-2108.
|
|
|
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [1] | 孙溪晨, 李伟兵, 黄昌伟, 付佳维, 冯君. 基于自注意力机制增强的CNN-LSTM的榴弹轨迹多步超前预测[J]. 兵工学报, 2024, 45(S1): 51-59. |
| [2] | 赵志欣, 曹玉龙, 陈远帅, 周辉林, 王玉皞. 面向外辐射源雷达目标探测的非时变稀疏模型和深度展开网络实现方法[J]. 兵工学报, 2024, 45(8): 2806-2816. |
| [3] | 罗皓文, 何绍溟, 亢有为. 一种基于迁移学习的多任务制导算法[J]. 兵工学报, 2024, 45(6): 1787-1798. |
| [4] | 栗苹, 周宇, 曹荣刚, 李发栋, 曹宇曦, 李佳武, 张安琪. 基于深度学习和双域融合的红外成像制导系统复杂背景噪声去除方法[J]. 兵工学报, 2024, 45(6): 1747-1760. |
| [5] | 沈英, 刘贤财, 王舒, 黄峰. 基于偏振编码图像的低空伪装目标实时检测[J]. 兵工学报, 2024, 45(5): 1374-1383. |
| [6] | 田大明, 苗圃. 融合模型求解与深度学习的可见光通信非线性均衡器[J]. 兵工学报, 2024, 45(2): 466-473. |
| [7] | 张堃, 杜睿怡, 时昊天, 华帅. 基于Mogrifier-BiGRU的飞行器轨迹预测[J]. 兵工学报, 2024, 45(2): 373-384. |
| [8] | 杨家铭, 潘悦, 王强, 曹怀刚, 高荪培. 水下弱目标跟踪的深度学习方法研究[J]. 兵工学报, 2024, 45(2): 385-394. |
| [9] | 孙凯, 张成, 詹天, 苏迪. 融合注意力机制和多层动态形变卷积的多视图立体视觉重建方法[J]. 兵工学报, 2024, 45(10): 3631-3641. |
| [10] | 秦昊林, 许廷发, 李佳男. 基于超像素注意力和孪生结构的半监督高光谱显著性目标检测[J]. 兵工学报, 2023, 44(9): 2639-2649. |
| [11] | 彭沛然, 任术波, 李佳男, 周鸿伟, 许廷发. 基于光照感知的多光谱融合行人检测方法[J]. 兵工学报, 2023, 44(9): 2622-2630. |
| [12] | 周宇, 曹荣刚, 栗苹, 马啸. 一种用于外场试验图像的引信炸点检测方法[J]. 兵工学报, 2023, 44(8): 2453-2464. |
| [13] | 王洋, 冯永新, 宋碧雪, 田秉禾. DP-DRCnet卷积神经网络信号调制识别算法[J]. 兵工学报, 2023, 44(2): 545-555. |
| [14] | 张良安, 陈洋, 谢胜龙, 刘同鑫. 基于机器视觉与深度学习的飞机防护栅裂纹检测系统[J]. 兵工学报, 2023, 44(2): 507-516. |
| [15] | 郑志伟, 管雪元, 傅健, 马训穷, 尹上. 基于卷积神经网络与长短期记忆神经网络的弹丸轨迹预测[J]. 兵工学报, 2023, 44(10): 2975-2983. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4