
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3407-3421.doi: 10.12382/bgxb.2023.0811
所属专题: 群体协同与自主技术
毕文豪*( ), 王炤晰, 吴伟, 张安
), 王炤晰, 吴伟, 张安
收稿日期:2023-08-29
上线日期:2023-11-01
通讯作者:
基金资助:
BI Wenhao*(), WANG Zhaoxi, WU Wei, ZHANG An
Received:2023-08-29
Online:2023-11-01
摘要:
无人机集群自主协同作战是未来战争的重要作战样式,自主协同机制研究有利于揭示无人机集群协同形成与演化规律,为无人机集群作战应用提供理论支撑。首先构建无人机集群信息交互网络,定义基于拓扑势的无人机交互等级。通过分析无人机集群自主协同与演化博弈的映射关系,建立基于公共品博弈的无人机集群演化博弈模型,设计基于交互等级的无人机集群总体期望收益函数、平均期望收益函数和愿景更新动态策略更新机制。利用马尔可夫链定量描述无人机集群演化过程,并理论推导了表征无人机集群演化博弈平稳分布的平均丰度函数。通过仿真验证基于公共品博弈的无人机集群自主协同机制的可行性和有效性,并分析选择强度、交互收益系数、增益因子与愿景水平等参数变化对无人机集群协同行为的影响,为无人机集群自主协同参数调控设计提供理论支持。研究结果表明:所提自主协同机制相较于提供点机制、惩罚机制能更大程度促进无人机集群合作涌现,为无人机集群自主协同理论向作战应用提供技术支持。
中图分类号:
毕文豪, 王炤晰, 吴伟, 张安. 基于公共品博弈的无人机集群自主协同机制[J]. 兵工学报, 2023, 44(11): 3407-3421.
BI Wenhao, WANG Zhaoxi, WU Wei, ZHANG An. Autonomous Collaboration Mechanism of UAV Cluster Based on Public Goods Game[J]. Acta Armamentarii, 2023, 44(11): 3407-3421.

图1 无人机集群自主协同信息交互网络示意图
Fig.1 Schematic diagram of autonomous collaboration information interaction network for UAV cluster

图2 无人机作战能力指标体系
Fig.2 UAV’s operational capability indicator system

图3 无人机集群自主协同与演化博弈映射关系
Fig.3 Mapping relationship between autonomous cooperation of UAV cluster and evolutionary game
| 无人机集群自主协同 | 公共品博弈 | 变量表示 |
|---|---|---|
| 无人机集群 | 结构化种群 | G=(V,E) |
| 燃油、武器、通信、干扰等资源 | 公共品 | |
| 无人机个体 | 参与者 | vi,i=1,2,3,…,N |
| 所有无人机当前选择策略构成的集合 | 策略集合 | S(t) |
| 无人机个体愿意向集群贡献资源 | 合作 | C |
| 无人机个体选择搭便车行为 | 背叛 | D |
| 不同策略下集群回馈给个体的作战效能 | 期望收益 | (t) |
| 无人机根据收益进行策略调整 | 策略更新 | |
| 选择不同策略的无人机在集群中占比变化 | 演化 | |
| 多轮博弈后占比稳定在一定范围内 | 演化稳定 |
表1 概念映射关系
Table 1 Concept mapping
| 无人机集群自主协同 | 公共品博弈 | 变量表示 |
|---|---|---|
| 无人机集群 | 结构化种群 | G=(V,E) |
| 燃油、武器、通信、干扰等资源 | 公共品 | |
| 无人机个体 | 参与者 | vi,i=1,2,3,…,N |
| 所有无人机当前选择策略构成的集合 | 策略集合 | S(t) |
| 无人机个体愿意向集群贡献资源 | 合作 | C |
| 无人机个体选择搭便车行为 | 背叛 | D |
| 不同策略下集群回馈给个体的作战效能 | 期望收益 | (t) |
| 无人机根据收益进行策略调整 | 策略更新 | |
| 选择不同策略的无人机在集群中占比变化 | 演化 | |
| 多轮博弈后占比稳定在一定范围内 | 演化稳定 |
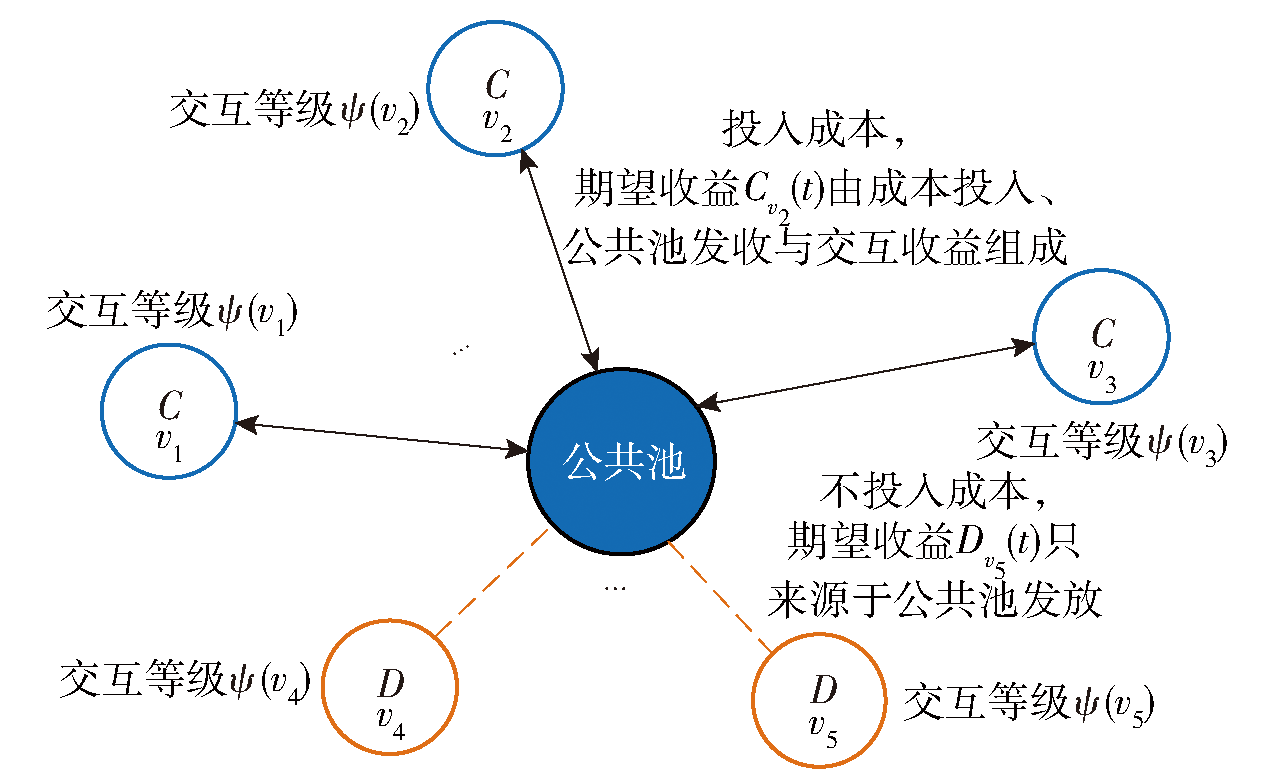
图4 基于无人机交互等级的收益发放模式示意图
Fig.4 Schematic diagram of revenue disbursement model based on UAV interaction levels

图5 异构无人机集群自主协同信息交互网络
Fig.5 Autonomous collaboration information interaction network for heterogeneous UAV cluster
| 无人机vj | 侦察能力S | 决策能力M | 打击能力A | 保障能力F | 属性指标 m(vj) | 交互等级 ψ(vj) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | S2 | S3 | M1 | M2 | M3 | A1 | A2 | A3 | F1 | F2 | F3 | |||
| UA | 0.92 | 0.92 | 0.98 | 0.12 | 0.23 | 0.15 | 0.25 | 0.10 | 0.19 | 0.78 | 0.86 | 0.75 | 0.77 | 1.59 |
| UA | 0.92 | 0.92 | 0.98 | 0.12 | 0.23 | 0.15 | 0.25 | 0.10 | 0.19 | 0.78 | 0.86 | 0.75 | 0.77 | 2.25 |
| UA | 0.92 | 0.92 | 0.98 | 0.12 | 0.23 | 0.15 | 0.25 | 0.10 | 0.19 | 0.78 | 0.86 | 0.75 | 0.77 | 2.78 |
| UA | 0.90 | 0.86 | 0.85 | 0.11 | 0.26 | 0.13 | 0.15 | 0.10 | 0.18 | 0.70 | 0.85 | 0.71 | 0.71 | 1.94 |
| UA | 0.90 | 0.86 | 0.85 | 0.11 | 0.26 | 0.13 | 0.15 | 0.10 | 0.18 | 0.70 | 0.85 | 0.71 | 0.71 | 1.26 |
| UA | 0.75 | 0.72 | 0.68 | 0.32 | 0.35 | 0.24 | 0.74 | 0.82 | 0.75 | 0.75 | 0.74 | 0.83 | 0.68 | 1.03 |
| UA | 0.42 | 0.70 | 0.51 | 0.21 | 0.32 | 0.26 | 0.91 | 0.93 | 0.92 | 0.82 | 0.70 | 0.85 | 0.58 | 0.82 |
| UA | 0.42 | 0.70 | 0.51 | 0.21 | 0.32 | 0.26 | 0.91 | 0.93 | 0.92 | 0.82 | 0.70 | 0.85 | 0.58 | 0.86 |
表2 无人机的交互等级取值
Table 2 Interaction levels of UAV cluster
| 无人机vj | 侦察能力S | 决策能力M | 打击能力A | 保障能力F | 属性指标 m(vj) | 交互等级 ψ(vj) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| S1 | S2 | S3 | M1 | M2 | M3 | A1 | A2 | A3 | F1 | F2 | F3 | |||
| UA | 0.92 | 0.92 | 0.98 | 0.12 | 0.23 | 0.15 | 0.25 | 0.10 | 0.19 | 0.78 | 0.86 | 0.75 | 0.77 | 1.59 |
| UA | 0.92 | 0.92 | 0.98 | 0.12 | 0.23 | 0.15 | 0.25 | 0.10 | 0.19 | 0.78 | 0.86 | 0.75 | 0.77 | 2.25 |
| UA | 0.92 | 0.92 | 0.98 | 0.12 | 0.23 | 0.15 | 0.25 | 0.10 | 0.19 | 0.78 | 0.86 | 0.75 | 0.77 | 2.78 |
| UA | 0.90 | 0.86 | 0.85 | 0.11 | 0.26 | 0.13 | 0.15 | 0.10 | 0.18 | 0.70 | 0.85 | 0.71 | 0.71 | 1.94 |
| UA | 0.90 | 0.86 | 0.85 | 0.11 | 0.26 | 0.13 | 0.15 | 0.10 | 0.18 | 0.70 | 0.85 | 0.71 | 0.71 | 1.26 |
| UA | 0.75 | 0.72 | 0.68 | 0.32 | 0.35 | 0.24 | 0.74 | 0.82 | 0.75 | 0.75 | 0.74 | 0.83 | 0.68 | 1.03 |
| UA | 0.42 | 0.70 | 0.51 | 0.21 | 0.32 | 0.26 | 0.91 | 0.93 | 0.92 | 0.82 | 0.70 | 0.85 | 0.58 | 0.82 |
| UA | 0.42 | 0.70 | 0.51 | 0.21 | 0.32 | 0.26 | 0.91 | 0.93 | 0.92 | 0.82 | 0.70 | 0.85 | 0.58 | 0.86 |

图6 交互收益系数与选择强度共同调控下平均丰度函数的变化趋势图
Fig.6 Variation of average abundance function with interaction gain factor and selection intensity

图7 成本与选择强度共同调控下平均丰度函数的变化趋势图
Fig.7 Variation of average abundance function with cost and selection intensity

图8 增益因子与选择强度共同调控下平均丰度函数的变化趋势图
Fig.8 Variation of average abundance function with enhancement factor and selection intensity

图9 愿景水平与选择强度共同调控下平均丰度函数的变化趋势图
Fig.9 Variation of average abundance function with aspiration level and selection intensity

图10 演化稳定轮次随各种参数变化图
Fig.10 Variation of evolutionarily stable round with various factors
| 合作演化机制 | 仿真参数条件 |
|---|---|
| 本文所提机制 | ω=0.3、ϑ=0.5、r=0.3、c=1、α=2 |
| 提供点机制 | 提供点T=1 |
| 惩罚机制 | 惩罚代价γ=0.2、惩罚概率a=0.6、惩罚系数β=2 |
| 奖励机制 | 奖励概率ap=0.2、公共额外奖励apT=1 |
表3 其他合作演化机制的参数条件
Table 3 Parameters of other cooperative evolutionary mechanisms
| 合作演化机制 | 仿真参数条件 |
|---|---|
| 本文所提机制 | ω=0.3、ϑ=0.5、r=0.3、c=1、α=2 |
| 提供点机制 | 提供点T=1 |
| 惩罚机制 | 惩罚代价γ=0.2、惩罚概率a=0.6、惩罚系数β=2 |
| 奖励机制 | 奖励概率ap=0.2、公共额外奖励apT=1 |

图11 不同机制下合作水平与期望效益函数演变情况
Fig.11 Evolution of cooperation level and expected benefit functions under different cooperative evolutionary mechanisms

图12 无人机集群状态分布概率演化图
Fig.12 Evolution of state distribution for UAV cluster
| [1] |
罗杰, 姜鑫, 郭炳晖, 等. 群体智能系统的动力学模型与群体熵度量[J]. 中国科学(信息科学), 2022, 52(1):99-110.
|
|
doi: 10.1360/SSI-2020-0193 URL |
|
| [2] |
庞漩. 基于群智算法的无人机任务调度方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2021:19-43.
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
程传斌, 倪艾辰, 房翔宇, 等. 改进的动态A*-Q-Learning算法及其在无人机航迹规划中的应用[J]. 现代信息科技, 2021, 5(9):1-5,9.
|
|
|
|
| [6] |
轩书哲, 柯良军. 基于多智能体强化学习的无人机集群攻防对抗策略研究[J]. 无线电工程, 2021, 51(5):360-366.
|
|
|
|
| [7] |
doi: 10.1109/TWC.7693 URL |
| [8] |
朱立龙, 荣俊美, 张思意. 政府奖惩机制下药品安全质量监管三方演化博弈及仿真分析[J]. 中国管理科学, 2021, 29(11):55-67.
|
|
|
|
| [9] |
郭本海, 王涵. 多方博弈情景下我国自主品牌轿车价值重构问题研究[J]. 中国管理科学, 2018, 26(10):140-151.
|
|
|
|
| [10] |
doi: 10.3389/fevo.2019.00111 URL |
| [11] |
doi: 10.3390/su141912498 URL |
| [12] |
高阳, 田达, 吴克钊, 等. 基于阈值公共品博弈的无人机集群干扰决策技术[J]. 无线电通信技术, 2023, 48 (6):1034-1038.
|
|
|
|
| [13] |
鞠锴, 冒泽慧, 姜斌, 等. 基于势博弈的异构多智能体系统任务分配和重分配[J]. 自动化学报, 2023, 48(10):2416-2428.
|
|
|
|
| [14] |
彭雅兰, 段海滨, 魏晨. 基于交替方向网络进化博弈的无人机集群任务分配[J]. 工程科学学报, 2023, 44 (4):792-800.
|
|
|
|
| [15] |
禹明刚, 何明, 张东戈, 等. 基于多元公共品演化博弈的无人作战集群策略占优条件[J]. 系统工程与电子技术, 2021, 43(9):2553-2561.
doi: 10.12305/j.issn.1001-506X.2021.09.23 |
|
doi: 10.12305/j.issn.1001-506X.2021.09.23 |
|
| [16] |
禹明刚, 陈瑾, 何明, 等. 基于演化博弈的社团网络无人集群协同机制[J]. 中国科学:技术科学, 2023, 53(2):221-242.
|
|
|
|
| [17] |
全吉, 储育青, 王先甲. 具有惩罚策略的公共物品博弈与合作演化[J]. 系统工程理论与实践, 2019, 39(1):141-149.
doi: 10.12011/1000-6788-2017-1059-09 |
|
|
|
| [18] |
全吉, 储育青, 王先甲. 自愿参与机制下的公共物品博弈与合作演化[J]. 系统工程学报, 2020, 35(2):188-200.
|
|
|
|
| [19] |
张耀. 公共品博弈中合作演化及异质性研究[D]. 杭州: 杭州电子科技大学, 2017:32-43.
|
|
|
|
| [20] |
史冬梅. 复杂网络上的合作涌现空间公共品博弈中的异质性研究[D]. 北京: 中国科学技术大学, 2011:47-73.
|
|
|
|
| [21] |
杨志虎. 复杂网络上的演化博弈与合作演化动力学研究[D]. 西安: 西安电子科技大学, 2014:32-52.
|
|
|
|
| [22] |
胡灵慧. 基于公共品博弈模型的复杂网络演化博弈动力学研究[D]. 成都: 电子科技大学, 2020:26-34.
|
|
|
|
| [23] |
doi: 10.1038/nature10736 |
| [24] |
夏可. 愿景动态下多人演化博弈模型与平均丰度函数[D]. 武汉: 武汉大学, 2019:30-54.
|
|
|
|
| [25] |
doi: 10.1007/s11071-023-08297-x |
| [26] |
|
| [27] |
doi: 10.3390/su142114329 URL |
| [28] |
|
| [29] |
谢榕, 顾村锋. 一种欧椋鸟群协同算法[J]. 武汉大学学报(理学版), 2019, 65(3):229-237.
|
|
|
|
| [30] |
张艳玲, 刘爱志, 孙长银. 间接互惠与合作演化的若干问题研究进展[J]. 自动化学报, 2018, 44(1):1-12.
|
|
|
|
| [31] |
李阿明, 王龙. 时序网络控制[J]. 系统科学与数学, 2019, 39 (2):184-202.
doi: 10.12341/jssms13582 |
|
doi: 10.12341/jssms13582 |
|
| [32] |
王超, 郭基联, 符凌云. 基于拓扑势的作战体系网络节点重要度评估方法[J]. 兵工学报, 2020, 41(8):1658-1664.
doi: 10.3969/j.issn.1000-1093.2020.08.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.08.020 |
|
| [33] |
doi: 10.1098/rsif.2020.0777 URL |
| [34] |
|
| [35] |
宫远强, 张业鹏, 马万鹏, 等. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9): 2661-2671.
doi: 10.12382/bgxb.2022.1181 |
|
doi: 10.12382/bgxb.2022.1181 |
|
| [36] |
王先甲, 顾翠伶, 赵金华, 等. 随机演化动态及其合作机制研究综述[J]. 系统科学与数学, 2019, 39(10):1533-1552.
doi: 10.12341/jssms13701 |
|
doi: 10.12341/jssms13701 |
|
| [37] |
王刚, 王志屹, 张恩宁, 等. 多阶段平台动态防御的Markov演化博弈模型及迁移策略[J]. 兵工学报, 2021, 42(8): 1690-1697.
|
|
doi: 10.3969/j.issn.1000-1093.2021.08.013 |
| [1] | 曹子建, 孙泽龙, 闫国闯, 傅妍芳, 杨博, 李秦洁, 雷凯麟, 高领航. 基于强化学习的无人机集群对抗策略推演仿真[J]. 兵工学报, 2023, 44(S2): 126-134. |
| [2] | 宫远强, 张业鹏, 马万鹏, 薛霄. 无人机蜂群中的群体智能涌现机理[J]. 兵工学报, 2023, 44(9): 2661-2671. |
| [3] | 严钰文, 毕文豪, 张安, 张百川. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9): 2672-2684. |
| [4] | 张琦, 葛玉雪, 李攀, 康淇钧, 裴扬. 基于ABMS的全光化无人机集群体系贡献率评估方法[J]. 兵工学报, 2023, 44(11): 3422-3435. |
| [5] | 王刚, 王志屹, 张恩宁, 马润年, 陈彤睿. 多阶段平台动态防御的Markov演化博弈模型及迁移策略[J]. 兵工学报, 2021, 42(8): 1690-1697. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4