
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (11): 3269-3278.doi: 10.12382/bgxb.2023.0730
所属专题: 群体协同与自主技术
廖峻北1, 伊烁闻1, 雷飞1, 刘思宇1, 郭朝1,*( ), 王志瑞2,3, 闫曈2,3, 党睿娜2,3
), 王志瑞2,3, 闫曈2,3, 党睿娜2,3
收稿日期:2023-08-08
上线日期:2023-11-01
通讯作者:
基金资助:
LIAO Junbei1, YI Shuowen1, LEI Fei1, LIU Siyu1, GUO Zhao1,*(), WANG Zhirui2,3, YAN Tong2,3, DANG Ruina2,3
Received:2023-08-08
Online:2023-11-01
摘要:
机器人仿生关节刚度连续变化功能的设计与控制是柔性驱动技术的难点问题。提出一种可连续变刚度的仿生驱动关节,该关节采用变力臂方式实现从低刚度到高刚度的连续变化,仿生驱动关节主副电机功率比大、结构紧凑。为了分析该仿生驱动关节的弹性变形与负载之间的刚度变化关系,建立有负载条件下的静力学方程,通过数值计算模拟得到关节刚度与主副电机的角度关系,并对仿生驱动关节进行力矩跟踪、阶跃响应和刚度跟踪3种实验。实验结果表明,新设计的变刚度驱动关节在16N·m的正弦输出力矩下,最大误差为1.23N·m,方差为0.19N·m,最大误差占总幅值的7.7%;在刚度跟踪为0.4~1.6N·m/(°)范围内、输出扭转角为5°时,误差最大为0.09N·m/(°),占总均值刚度的9.0%。
中图分类号:
廖峻北, 伊烁闻, 雷飞, 刘思宇, 郭朝, 王志瑞, 闫曈, 党睿娜. 连续变刚度仿生驱动关节的设计与建模分析[J]. 兵工学报, 2023, 44(11): 3269-3278.
LIAO Junbei, YI Shuowen, LEI Fei, LIU Siyu, GUO Zhao, WANG Zhirui, YAN Tong, DANG Ruina. Design and Modeling of a Bionic Joint with Continuously Variable Stiffness[J]. Acta Armamentarii, 2023, 44(11): 3269-3278.
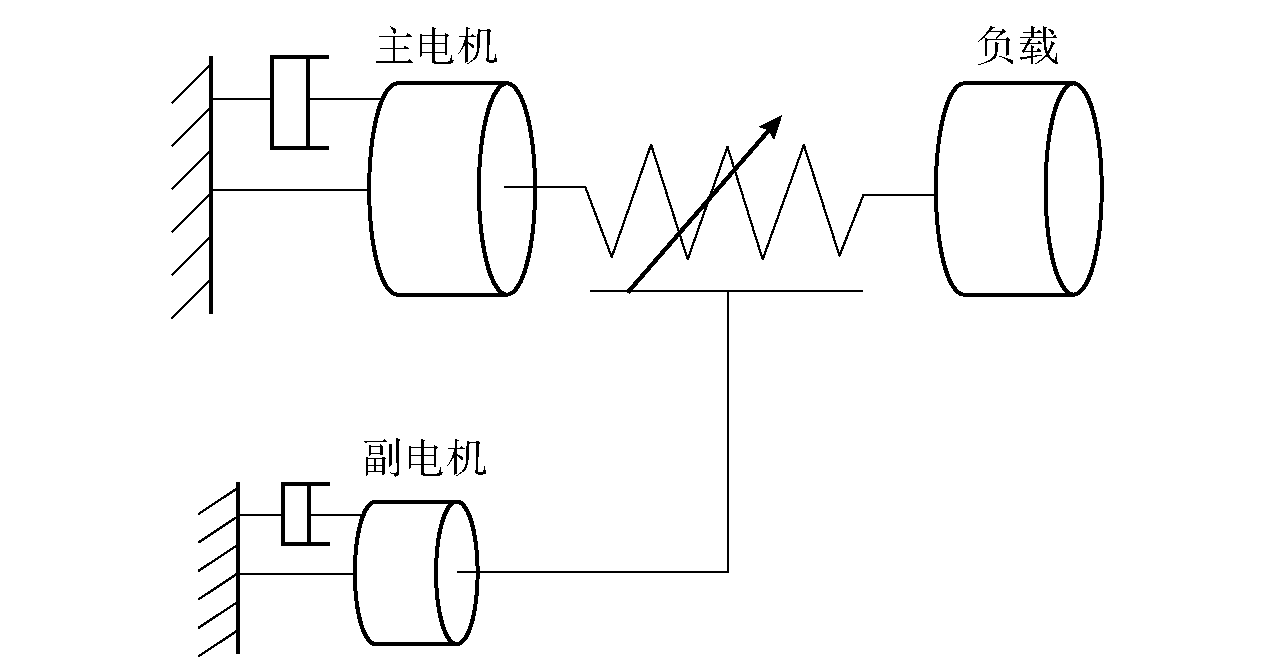
图1 变刚度原理图
Fig.1 Schematic diagram of variable stiffness

图2 结构设计图
Fig.2 Structural design
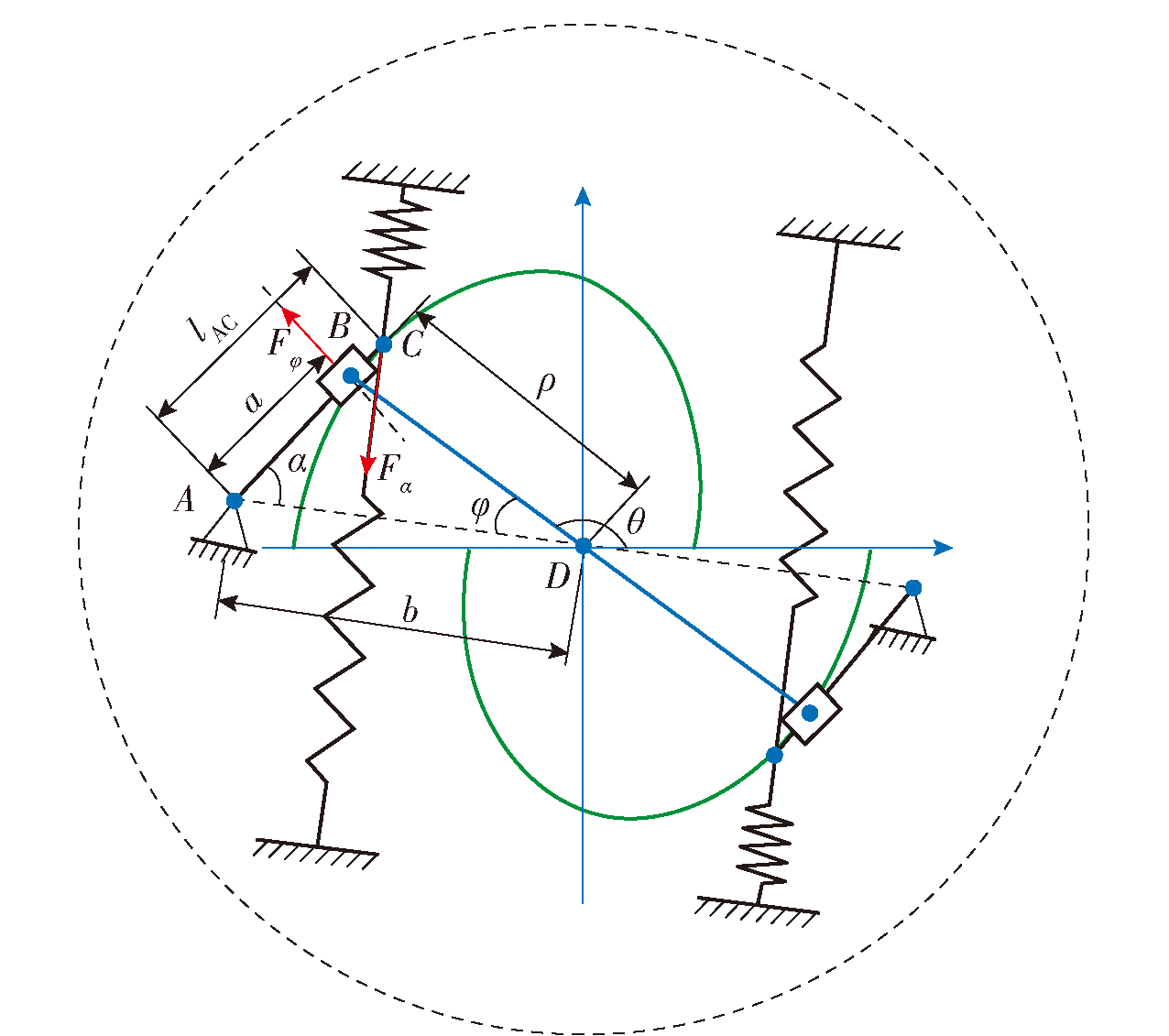
图3 弹簧杠杆原理图
Fig.3 Principle of spring lever
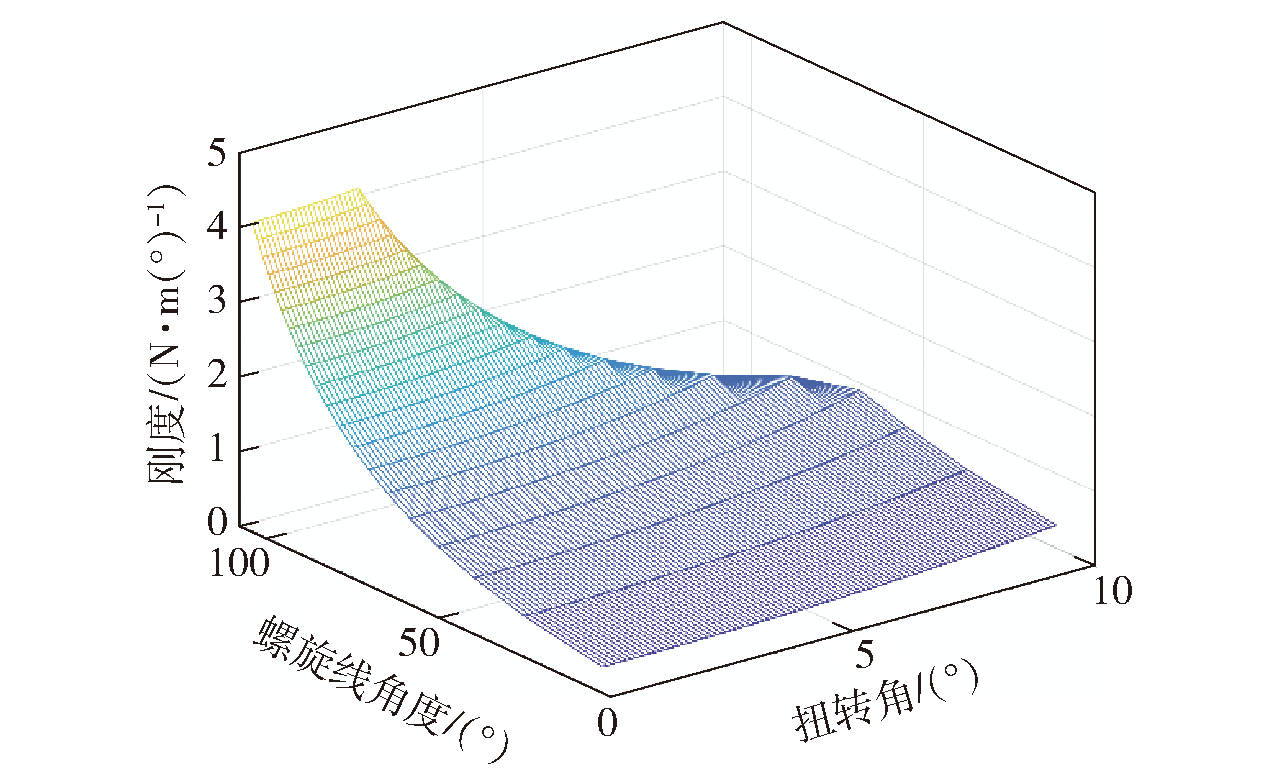
图4 刚度与角度关系图
Fig.4 Stiffness versus deflection and spiral angles
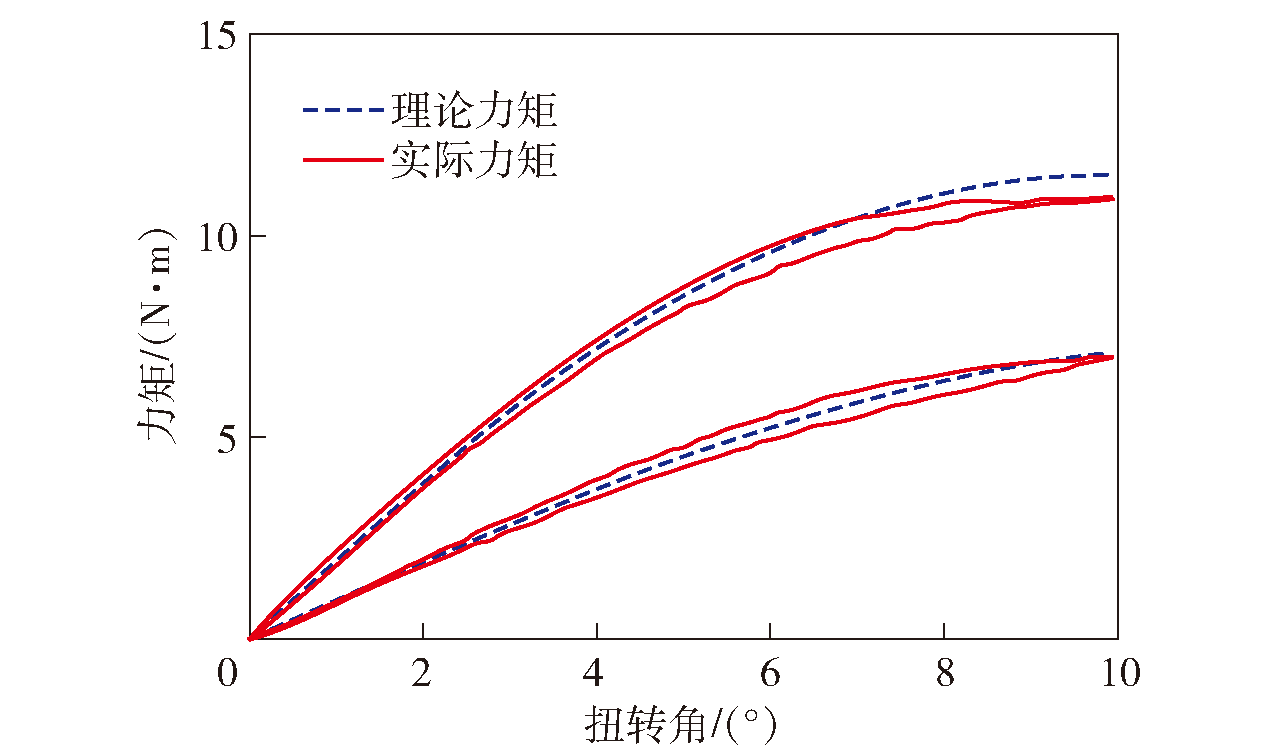
图5 力矩与扭转角关系图
Fig.5 Relationship between torque and deflection
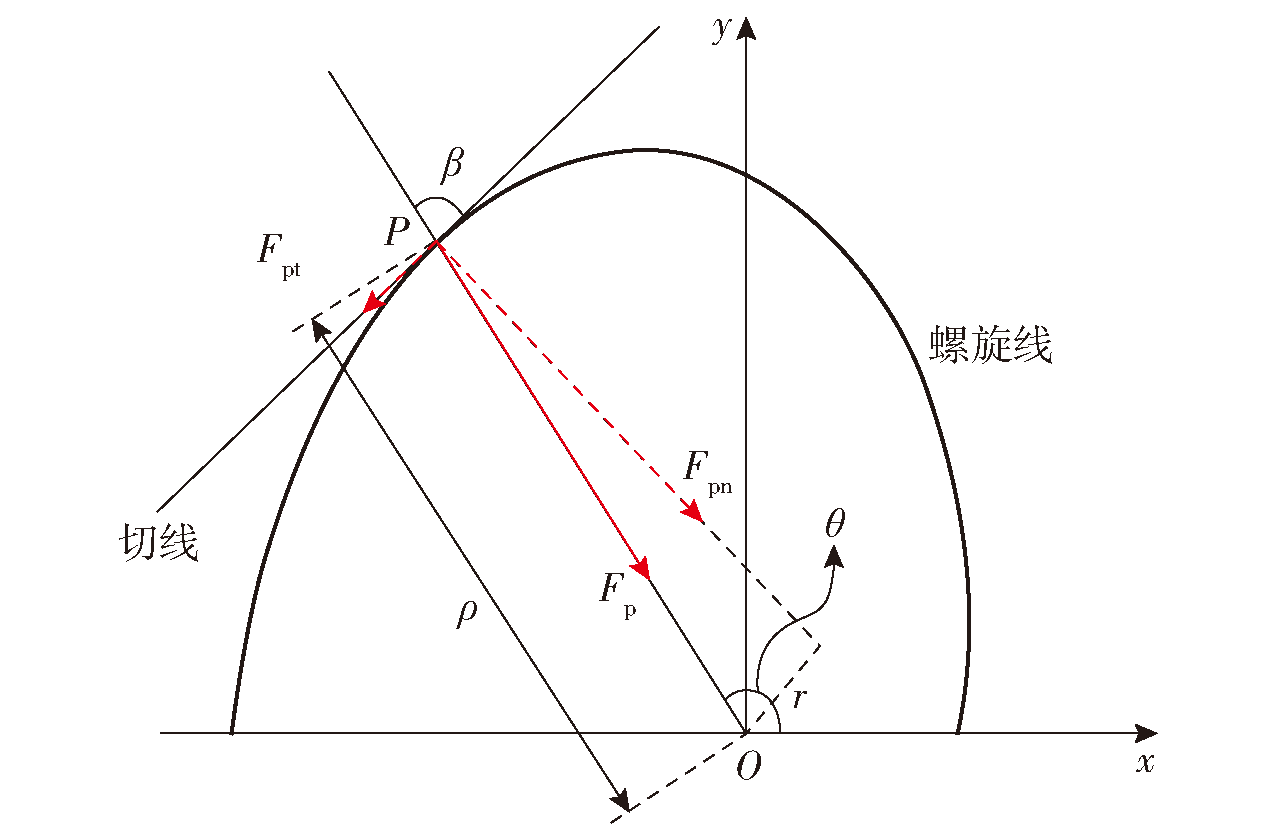
图6 螺旋线齿轮力矩分析图
Fig.6 Torque analytical graph of Archimedean spiral gear

图7 动力矩与阻力矩分析图
Fig.7 Relation of active torque and resistance torque
| 参数 | 取值 |
|---|---|
| 螺旋线齿轮齿数 | 78 |
| 副电机齿轮齿数 | 19 |
| 齿轮材料 | 45号钢 |
| 其他零件材料 | 6061合金 |
| 齿轮模数m/mm | 1 |
| 杠杆总长a/mm | 23 |
| 杠杆支点半径b/mm | 33 |
| 副电机额定输出扭矩/(N·m) | 3 |
| 主电机峰值输出扭矩/(N·m) | 23 |
| 副电机峰值输出扭矩/(N·m) | 3 |
| 驱动关节直径/mm | 110 |
| 驱动关节轴向长度/mm | 31 |
| 关节旋转角度/(°) | -120~120 |
| 弹性扭转角度/(°) | -10~10 |
| 弹簧劲度系数/(N·m) | 7440.5 |
| 副电机额定转速/(r·min-1) | 469 |
| 主电机额定转速/(r·min-1) | 80 |
表1 仿生关节参数
Table 1 Parameters of bionic joint
| 参数 | 取值 |
|---|---|
| 螺旋线齿轮齿数 | 78 |
| 副电机齿轮齿数 | 19 |
| 齿轮材料 | 45号钢 |
| 其他零件材料 | 6061合金 |
| 齿轮模数m/mm | 1 |
| 杠杆总长a/mm | 23 |
| 杠杆支点半径b/mm | 33 |
| 副电机额定输出扭矩/(N·m) | 3 |
| 主电机峰值输出扭矩/(N·m) | 23 |
| 副电机峰值输出扭矩/(N·m) | 3 |
| 驱动关节直径/mm | 110 |
| 驱动关节轴向长度/mm | 31 |
| 关节旋转角度/(°) | -120~120 |
| 弹性扭转角度/(°) | -10~10 |
| 弹簧劲度系数/(N·m) | 7440.5 |
| 副电机额定转速/(r·min-1) | 469 |
| 主电机额定转速/(r·min-1) | 80 |

图8 样机与实验原理图
Fig.8 Prototype and experiment principle of VSA
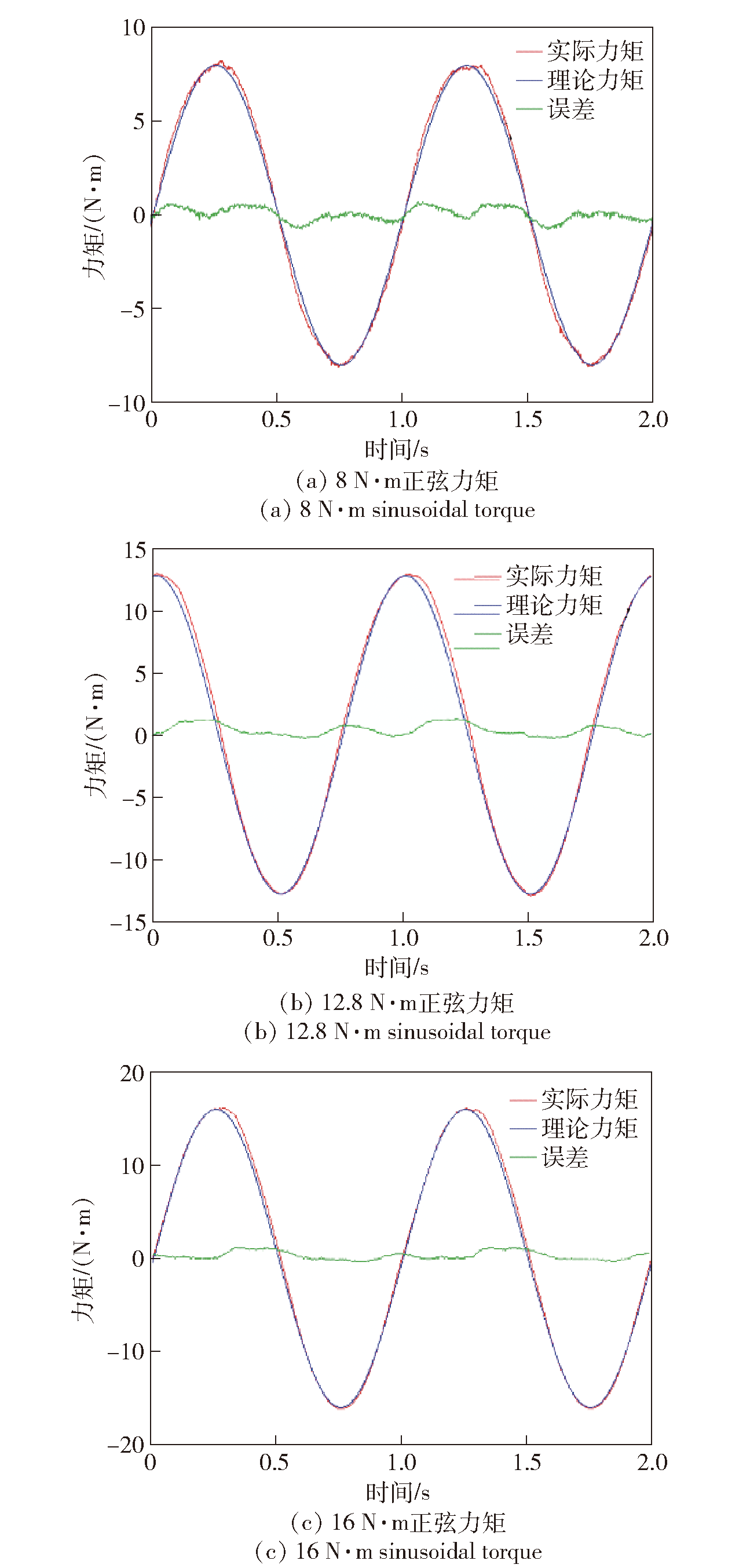
图9 正弦力矩实验跟踪图
Fig.9 Sinusoidal torque experimental tracking results
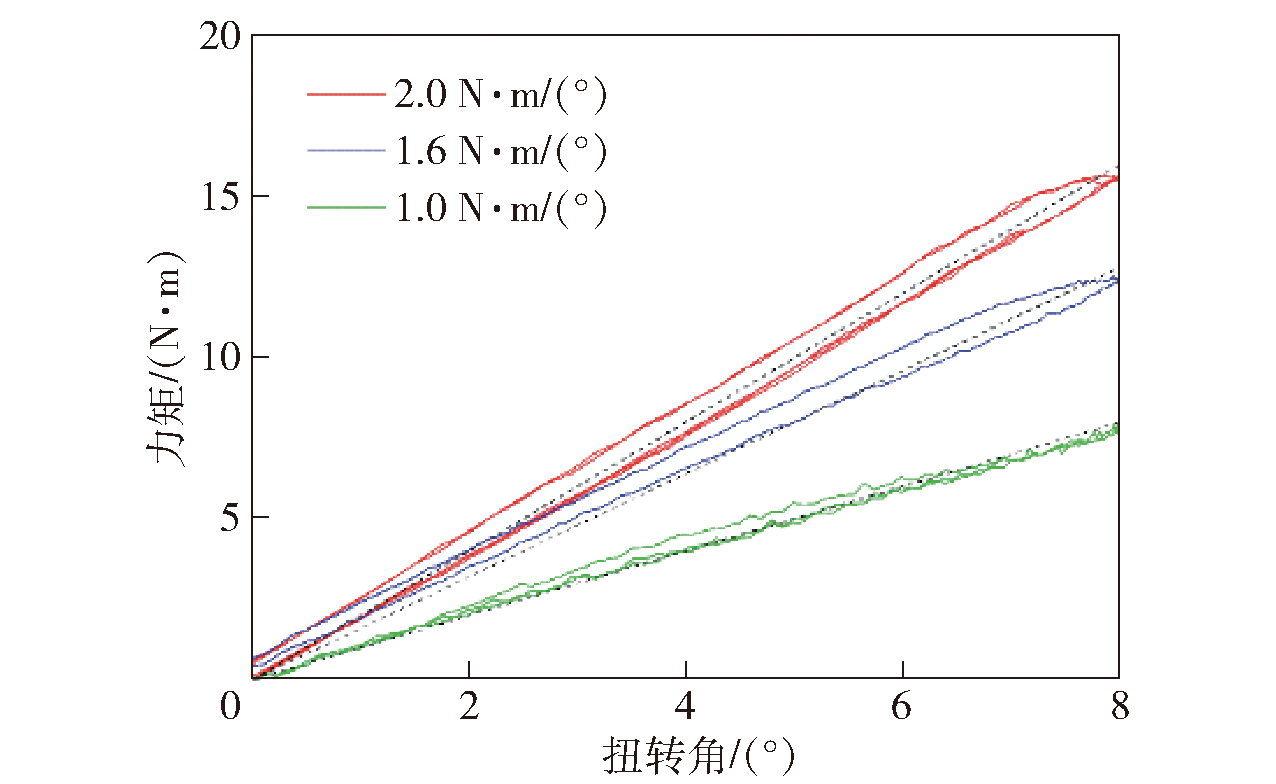
图10 不同刚度下理论力矩与实际力矩比较图
Fig.10 Comparison between the theoretical and actual torque
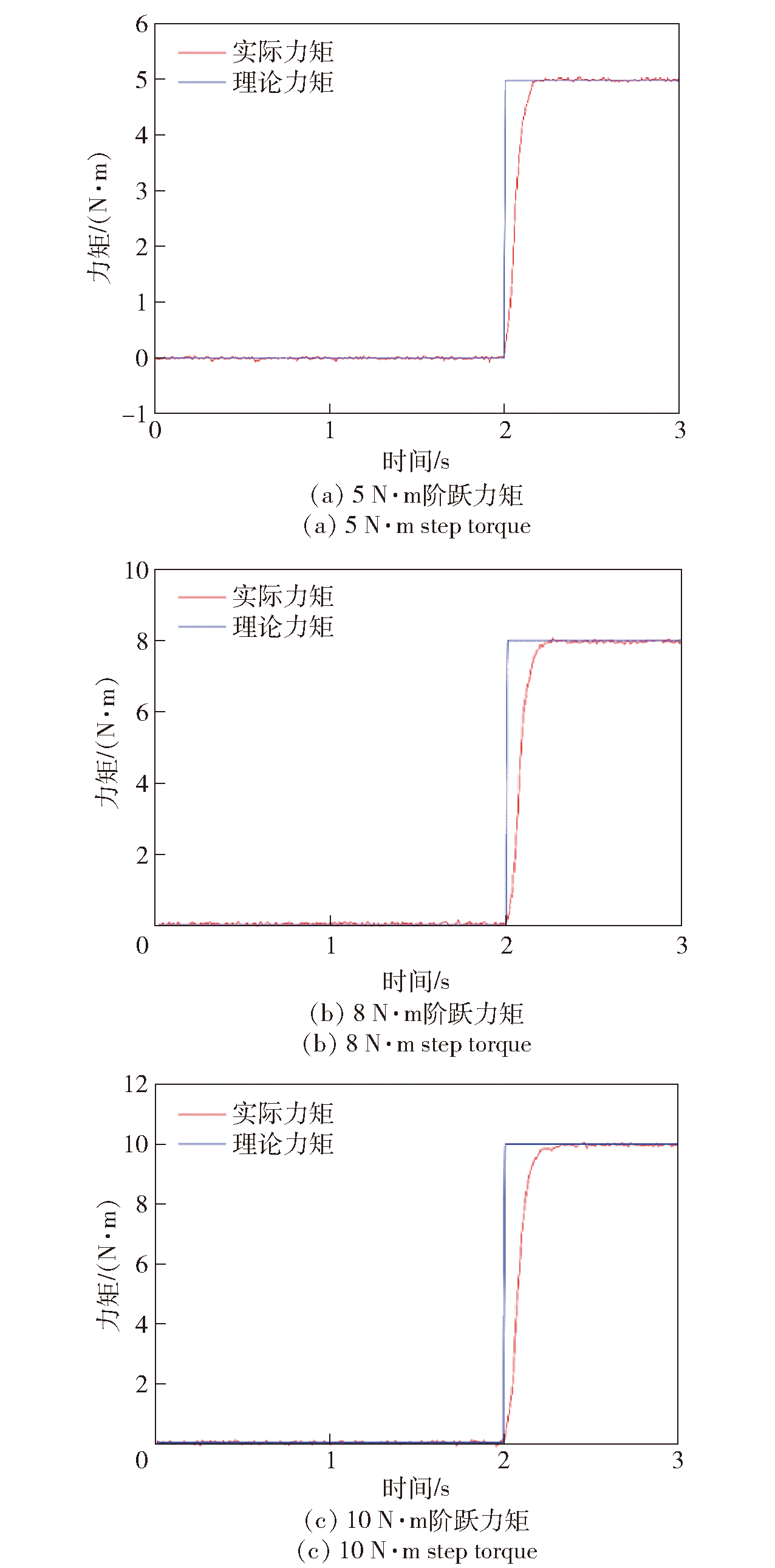
图11 阶跃力矩实验跟踪图
Fig.11 Step torque experimental tracking results
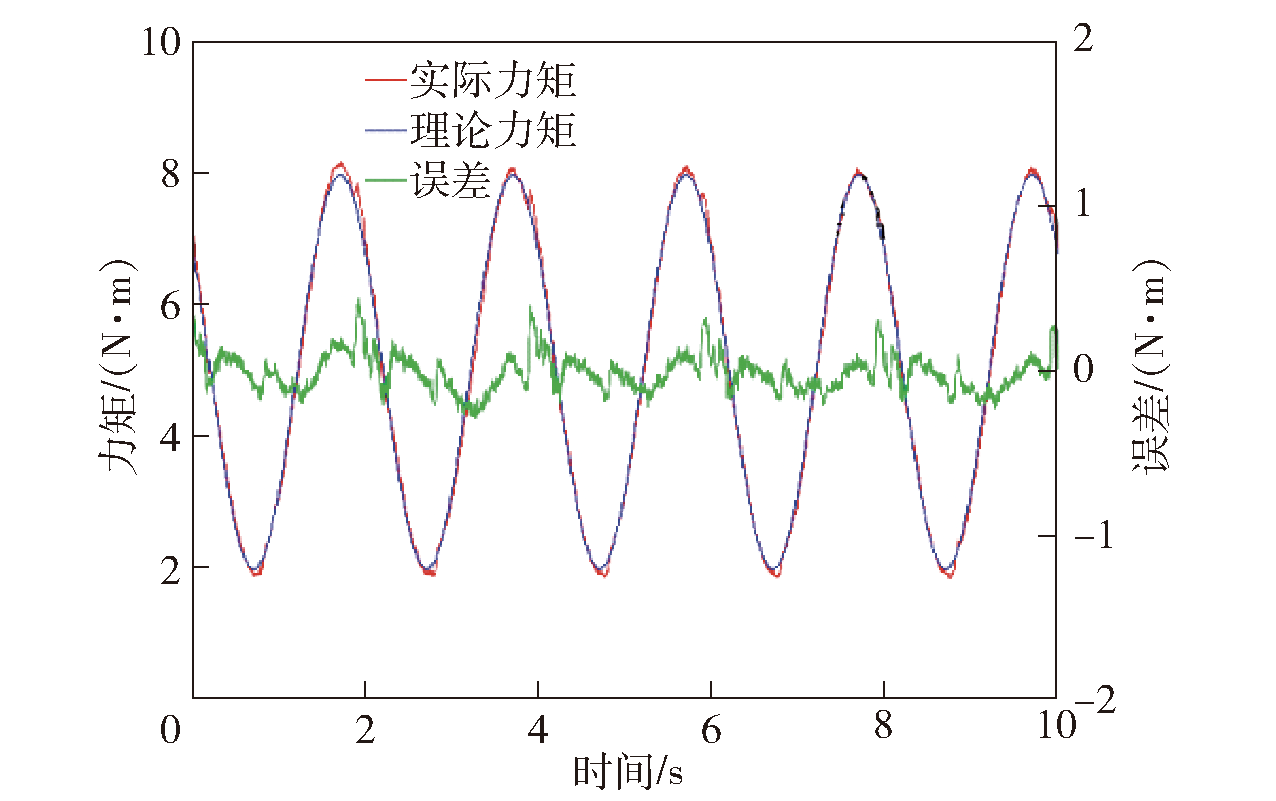
图12 刚度跟踪实验图
Fig.12 Stiffness tracking experiment
| 名称 | 输出端直径/mm | 最大输出力矩/(N·m) | 输出刚度特性 | 质量/kg | 刚度范围/(N·m·rad-1) |
|---|---|---|---|---|---|
| 仿生驱动关节 | 110 | 23 | 线性 | 1.6 | 17.20~286.62 |
| AwAS[ | 130 | 80 | 1.8 | 30~1300 | |
| b-b VSA[ | 3 | 非线性 | 0.7~1.86 | ||
| HVSA | 17 | 非线性 | 2.36 | 4.01~126.05 | |
| SVSA[ | 140 | 22.1 | 非线性 | 2.4 | 1.7~150.56 |
| ESPaa[ | 66 | 6.1 | 非线性 | 0.45 | 0.35~35 |
表2 5种典型变刚度驱动器的性能对比
Table 2 Performance comparison of each VSA
| 名称 | 输出端直径/mm | 最大输出力矩/(N·m) | 输出刚度特性 | 质量/kg | 刚度范围/(N·m·rad-1) |
|---|---|---|---|---|---|
| 仿生驱动关节 | 110 | 23 | 线性 | 1.6 | 17.20~286.62 |
| AwAS[ | 130 | 80 | 1.8 | 30~1300 | |
| b-b VSA[ | 3 | 非线性 | 0.7~1.86 | ||
| HVSA | 17 | 非线性 | 2.36 | 4.01~126.05 | |
| SVSA[ | 140 | 22.1 | 非线性 | 2.4 | 1.7~150.56 |
| ESPaa[ | 66 | 6.1 | 非线性 | 0.45 | 0.35~35 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
doi: 10.1016/j.asej.2020.11.005 URL |
| [5] |
doi: 10.1007/s11431-013-5443-7 URL |
| [6] |
丁良宏. BigDog四足机器人关键技术分析[J]. 机械工程学报, 2015, 51(7): 1-23.
doi: 10.3901/JME.2015.07.001 |
|
doi: 10.3901/JME.2015.07.001 |
|
| [7] |
|
| [8] |
doi: 10.1038/s41598-021-88879-0 pmid: 33953253 |
| [9] |
doi: 10.1108/IR-11-2014-0422 URL |
| [10] |
李庆中, 李晓丹, 于福杰, 等. 介电弹性体式蛙型仿生软体机器人设计[J]. 兵工学报, 2022, 43(1): 140-147.
|
|
doi: 10.3969/j.issn.1000-1093.2022.01.015 |
|
| [11] |
doi: 10.1109/TMECH.2022.3224423 URL |
| [12] |
|
| [13] |
刘畅, 毕树生, 赵宏哲, 等. 基于折叠式串联簧片的可调刚度致动器设计[J]. 机械工程学报, 2017, 53(17): 70-77.
doi: 10.3901/JME.2017.17.070 |
|
doi: 10.3901/JME.2017.17.070 |
|
| [14] |
doi: 10.1109/TMECH.3516 URL |
| [15] |
|
| [16] |
doi: 10.1016/j.robot.2007.05.013 URL |
| [17] |
doi: 10.1016/j.rcim.2019.101886 URL |
| [18] |
王伟, 刘立冬, 魏来, 等. 柔性齿条式变刚度关节驱动器设计与研究[J]. 机械工程学报, DOI: 10.3901/JME.2016.01.026.
|
|
|
|
| [19] |
doi: 10.1109/TMECH.2015.2501019 URL |
| [20] |
|
| [21] |
doi: 10.1016/j.mechmachtheory.2021.104323 URL |
| [22] |
doi: 10.1016/j.mechmachtheory.2019.05.016 URL |
| [23] |
doi: 10.1109/TMECH.2014.2321428 URL |
| [24] |
|
| [25] |
doi: 10.1109/TMECH.2012.2218615 URL |
| [26] |
|
| [27] |
孙剑韬, 周江琛, 郭朝, 等. 面向柔性机器人的串联式变刚度驱动器设计[J]. 华中科技大学学报(自然科学版), 2019, 47(1): 7-12.
|
|
|
|
| [28] |
doi: 10.1109/TMECH.3516 URL |
| [29] |
doi: 10.1016/j.mechmachtheory.2021.104716 URL |
| [30] |
doi: 10.1109/LSP.2016. URL |
| [31] |
doi: 10.1109/TMECH.2021.3055364 URL |
| [1] | 潘作栋,周悦,郭威,徐高飞,孙宇. 基于CB-RRT*算法的滩涂履带车路径规划[J]. 兵工学报, 2024, 45(4): 1117-1128. |
| [2] | 邢伯阳, 许威, 李宇峰, 赵浩宇, 王康, 闫曈. 基于分层解耦的四轮足机器人模型预测控制[J]. 兵工学报, 0, (): 0-0. |
| [3] | 董明泽, 温庄磊, 陈锡爱, 杨炅坤, 曾涛. 安全凸空间与深度强化学习结合的机器人导航方法[J]. 兵工学报, 0, (): 0-0. |
| [4] | 岳胜哲, 王正杰. 基于实例分割与光流的动态环境SLAM[J]. 兵工学报, 2024, 45(1): 156-165. |
| [5] | 张天艺, 郑颖, 裘信国, 季行健, 金晓航. 基于特征模型的5阶关节伺服系统扰动补偿策略[J]. 兵工学报, 2024, 45(1): 276-287. |
| [6] | 刘江涛, 周乐来, 李贻斌. 复杂地形六轮独立驱动与转向机器人轨迹跟踪与避障控制[J]. 兵工学报, 2024, 45(1): 166-183. |
| [7] | 苏治宝, 项燊, 余雪玮, 安旭阳. 一种全要素自主车队协同控制仿真系统[J]. 兵工学报, 2023, 44(S2): 35-43. |
| [8] | 赵熙俊, 崔星, 李兆冬, 王一全, 杨雨. 编队机动自适应车间距保持控制[J]. 兵工学报, 2023, 44(S2): 44-51. |
| [9] | 刘思宇, 廖峻北, 雷飞, 王志瑞, 闫曈, 党睿娜, 郭朝. 用于四足机器人的并联弹性腿足关节设计与优化[J]. 兵工学报, 2023, 44(S2): 71-83. |
| [10] | 降晨星, 姚其昌, 许鹏, 周雨婷, 闫曈. 新技术形势下四足、双足机器人技术的变革[J]. 兵工学报, 2023, 44(S2): 84-89. |
| [11] | 鞠爽, 王晶, 王灏, 周萌. 基于GWO-WOA的执行器严重故障多移动机器人编队重构控制[J]. 兵工学报, 2023, 44(S2): 114-125. |
| [12] | 许鹏, 赵建新, 范文慧, 邱天奇, 江磊, 梁振杰, 刘宇飞. 四足机器人特定复杂运动技能控制[J]. 兵工学报, 2023, 44(S2): 135-145. |
| [13] | 李曹妍, 郭振川, 郑冬冬, 魏延岭. 基于分布式模型预测控制的多机器人协同编队[J]. 兵工学报, 2023, 44(S2): 178-190. |
| [14] | 刘亚丽, 鲁妍池, 徐小龙, 宋遒志. 外骨骼机器人助力效能测试方法及应用综述[J]. 兵工学报, 0, (): 0-0. |
| [15] | 曹昊哲, 刘全攀. 基于半直接法的无人集群协同视觉SLAM算法[J]. 兵工学报, 2023, 44(11): 3345-3358. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4