
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (S1): 287-295.doi: 10.12382/bgxb.2024.0517
Previous Articles Next Articles
Li Huibin1, MA He1, LIU Pengfei1, YANG Peiying1, GUAN Xiaorong1,2,*( )
)
Received:2024-07-01
Online:2024-11-06
Contact:
GUAN Xiaorong
CLC Number:
Li Huibin, MA He, LIU Pengfei, YANG Peiying, GUAN Xiaorong. Current Development and Prospects of Wearable Supernumerary Robotic Limbs for Military Applications[J]. Acta Armamentarii, 2024, 45(S1): 287-295.
Add to citation manager EndNote|Ris|BibTeX
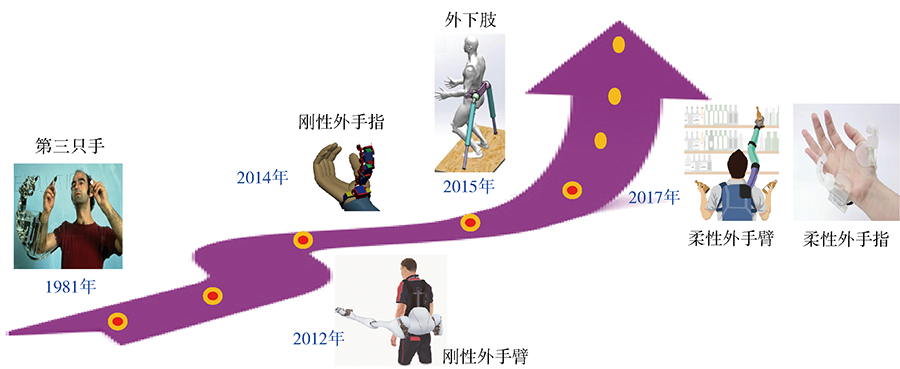
Fig.1 The development context of wearable supernumerary robotic limbs

Fig.2 Typical wearable supernumerary robotic arms
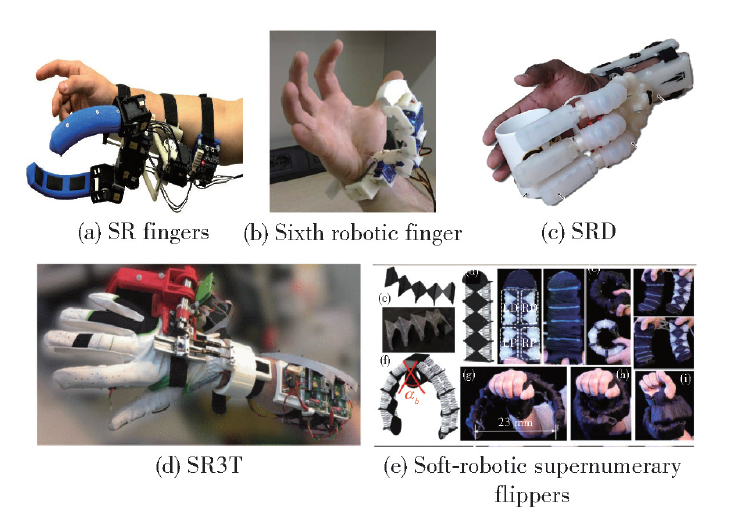
Fig.3 Typical wearable supernumerary robotic fingers

Fig.4 Typical wearable supernumerary robotic lower limbs
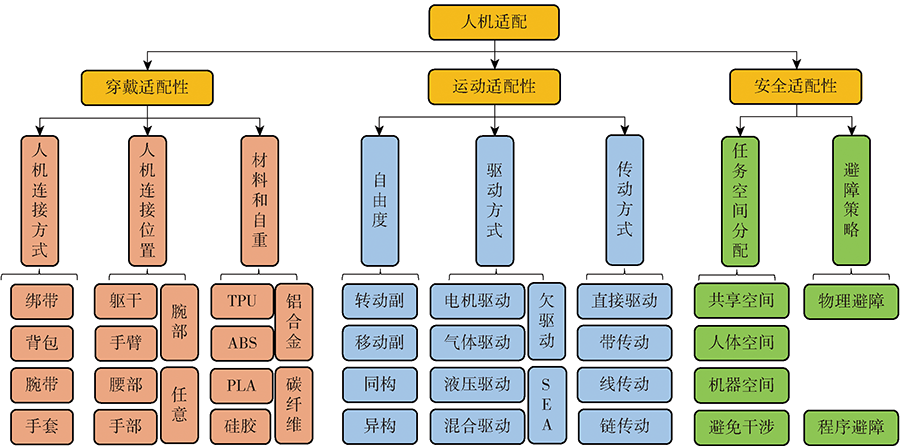
Fig.5 Human-robot interactive adapting
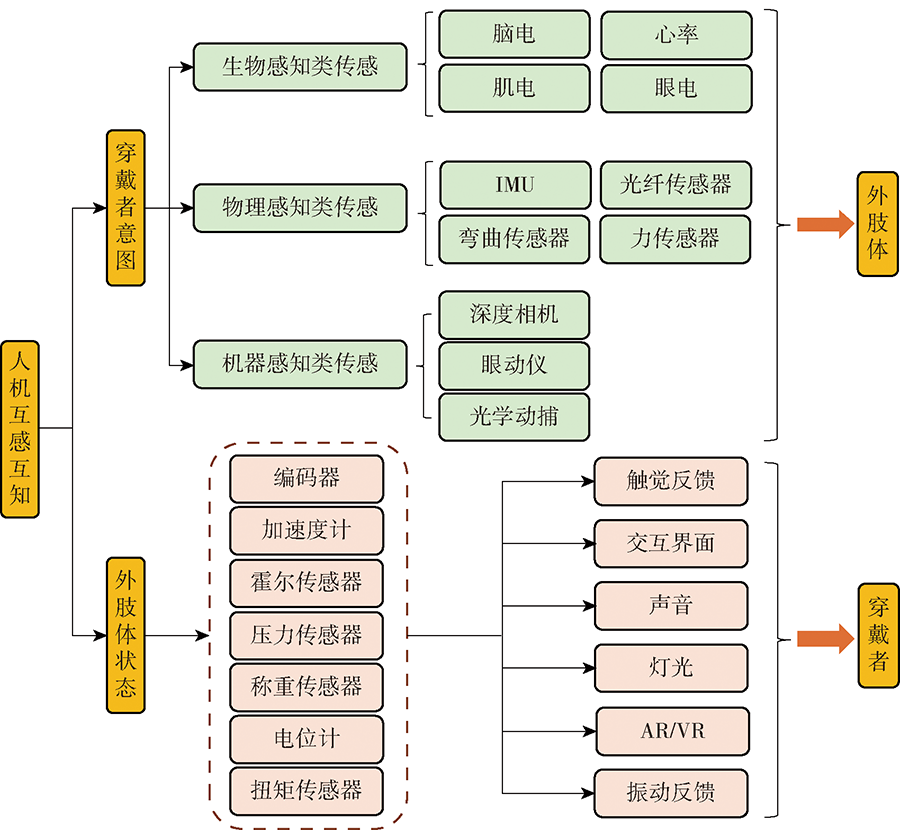
Fig.6 Human-robot interactive perception
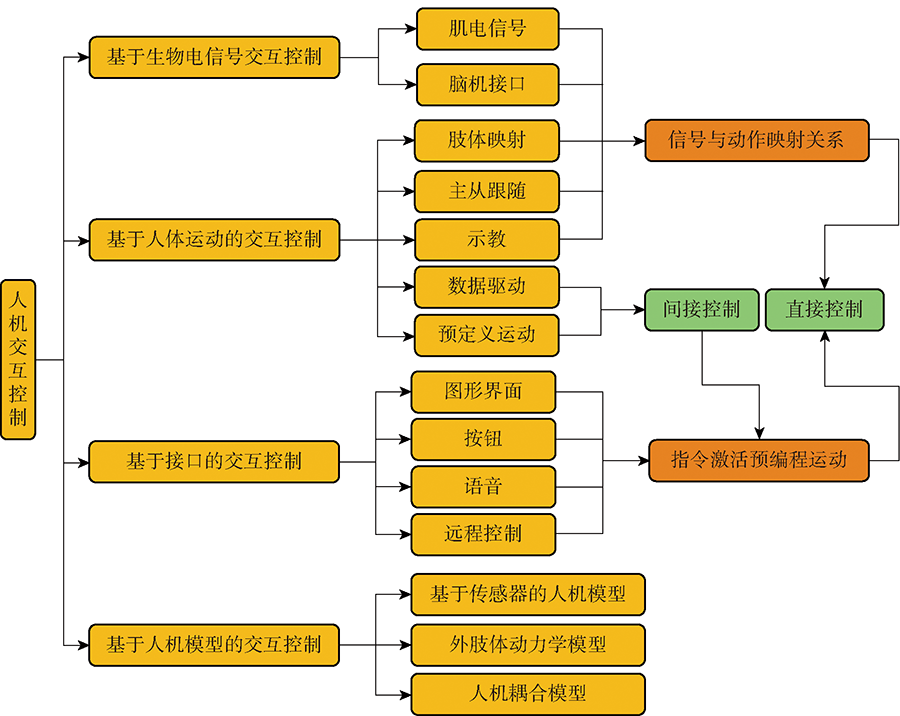
Fig.7 Human-robot interactive control
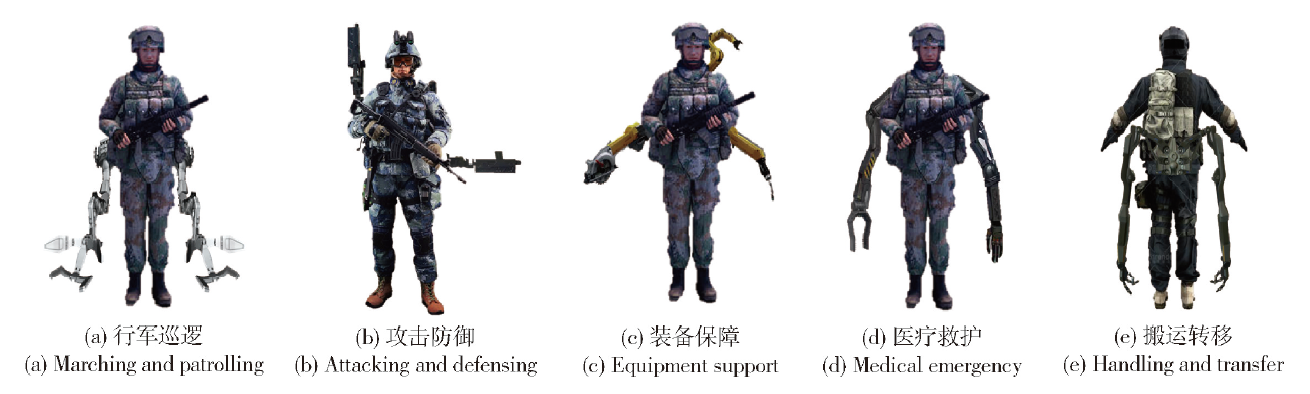
Fig.8 The conceptual images of wearable supernumerary robotic limbs for military application

Fig.9 Wearable weapon arms
| [1] |
刘德斌, 王旦, 陈柏, 等. 外肢体机器人研究综述[J]. 浙江大学学报(工学版), 2021, 55(2): 251-258.
|
|
|
|
| [2] |
荆泓玮, 朱延河, 赵思恺, 等. 外肢体机器人研究现状及发展趋势[J]. 机械工程学报, 2020, 56(7): 1-9.
doi: 10.3901/JME.2020.07.001 |
|
doi: 10.3901/JME.2020.07.001 |
|
| [3] |
|
| [4] |
|
| [5] |
杨志谋, 陈浩, 周正, 等. 智能规划:未来战争智权之争的关键[J]. 指挥控制与仿真, 2022, 44(3): 1-6.
doi: 10.3969/j.issn.1673-3819.2022.03.001 |
|
|
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
赵思恺, 李长乐, 张宗伟, 等. 模块化可重构外肢体机器人[J]. 仪器仪表学报, 2021, 42(4): 218-227.
|
|
|
|
| [10] |
|
| [11] |
|
| [12] |
doi: 10.1089/soro.2018.0065 pmid: 30307793 |
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
原大川, 王涛, 李丽君, 等. 单兵班组多平台协同作战应用研究[J]. 火力与指挥控制, 2019, 44(6): 148-152.
|
|
|
| [1] | LI Zhong, GUAN Xiaorong, LI Huibin, HE Long, LONG Yi. Research Status and Key Technology Analysis of Active Rigid Lower Limb Assisted Exoskeleton [J]. Acta Armamentarii, 2024, 45(S1): 262-270. |
| [2] | DANG Wanying, ZHOU Lelai, LI Yibin, ZHANG Chen. Neural Network Planning Method for Optimal Off-road Configuration of Modular Robots [J]. Acta Armamentarii, 2024, 45(10): 3674-3685. |
| [3] | SUN Pengyao, HUANG Yanyan, WANG Kaisheng. Two-dimensional Global Path Planning Based on Potential Field Enhanced Fireworks Algorithm [J]. Acta Armamentarii, 2024, 45(10): 3499-3518. |
| [4] | CHEN Qi, QIN Guoyang. Trajectory Tracking Control for Hybrid-driven Unmanned Underwater Vehicles with Free-flying and Crawling Dual-mode [J]. Acta Armamentarii, 2024, 45(9): 3216-3229. |
| [5] | LIU Yali, LU Yanchi, XU Xiaolong, SONG Qiuzhi. A Review of the Evaluation Methods of Assisting Effectiveness of Exoskeleton Robot and Its Applications [J]. Acta Armamentarii, 2024, 45(8): 2497-2519. |
| [6] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [7] | XING Boyang, XU Wei, LI Yufeng, ZHAO Haoyu, WANG Kang, YAN Tong. Model Predictive Control for Four-Wheeled Legged Robots Based on Hierarchical Decoupling [J]. Acta Armamentarii, 0, (): 0-0. |
| [8] | DONG Mingze, WEN Zhuanglei, CHEN Xiai, YANG Jiongkun, ZENG Tao. Research on Robot Navigation Method Integrating Safe Convex Space and Deep Reinforcement Learning [J]. Acta Armamentarii, 0, (): 0-0. |
| [9] | YUE Shengzhe, WANG Zhengjie. A SLAM in Dynamic Environment Based on Instance Segmentation and Optical Flow [J]. Acta Armamentarii, 2024, 45(1): 156-165. |
| [10] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [11] | LIU Jiangtao, ZHOU Lelai, LI Yibin. Trajectory Tracking and Obstacle Avoidance Control of Six-wheel Independent Drive and Steering Robot in Complex Terrain [J]. Acta Armamentarii, 2024, 45(1): 166-183. |
| [12] | SU Zhibao, XIANG Shen, YU Xuewei, AN Xuyang. A Simulation System for Cooperative Control of Autonomous Convoy [J]. Acta Armamentarii, 2023, 44(S2): 35-43. |
| [13] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| [14] | LIU Siyu, LIAO Junbei, LEI Fei, WANG Zhirui, YAN Tong, DANG Ruina, GUO Zhao. Design and Optimization of a Parallel Elastic Actuator Leg for Quadruped Robots [J]. Acta Armamentarii, 2023, 44(S2): 71-83. |
| [15] | JIANG Chenxing, YAO Qichang, XU Peng, ZHOU Yuting, YAN Tong. The Transformation of Quadruped and Biped Robot Technologies under the New Technological Situation [J]. Acta Armamentarii, 2023, 44(S2): 84-89. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||