
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 146-156.doi: 10.12382/bgxb.2023.0869
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang*( )
)
Received:2023-09-05
Online:2024-01-10
Contact:
FU Yanfang
CLC Number:
LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare[J]. Acta Armamentarii, 2023, 44(S2): 146-156.
Add to citation manager EndNote|Ris|BibTeX
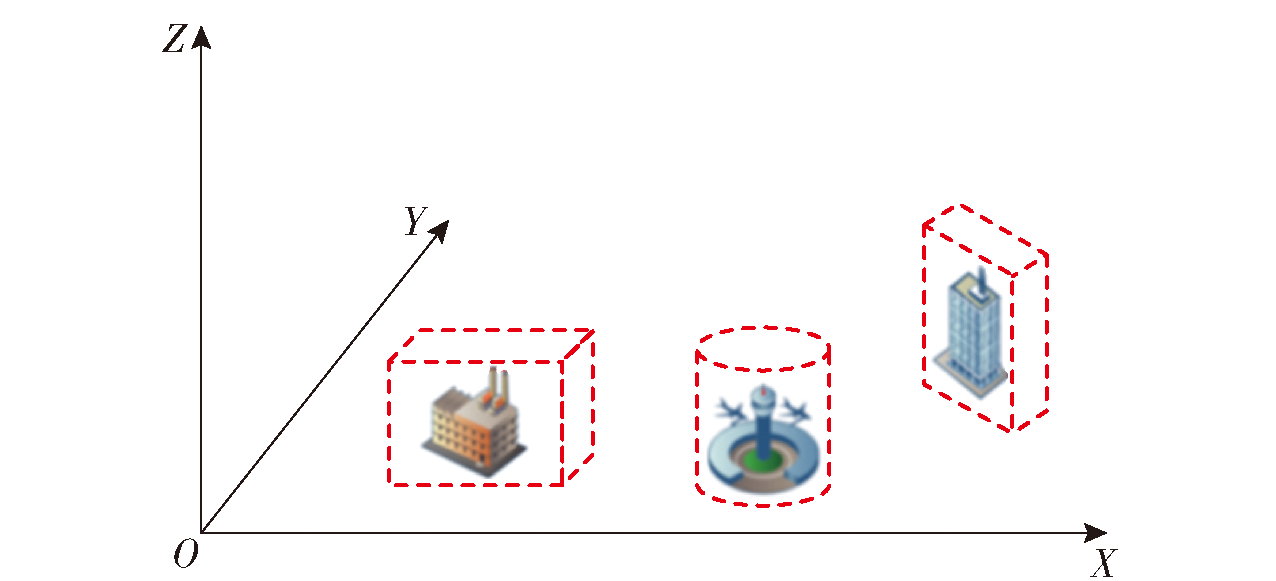
Fig.1 Threat modelling
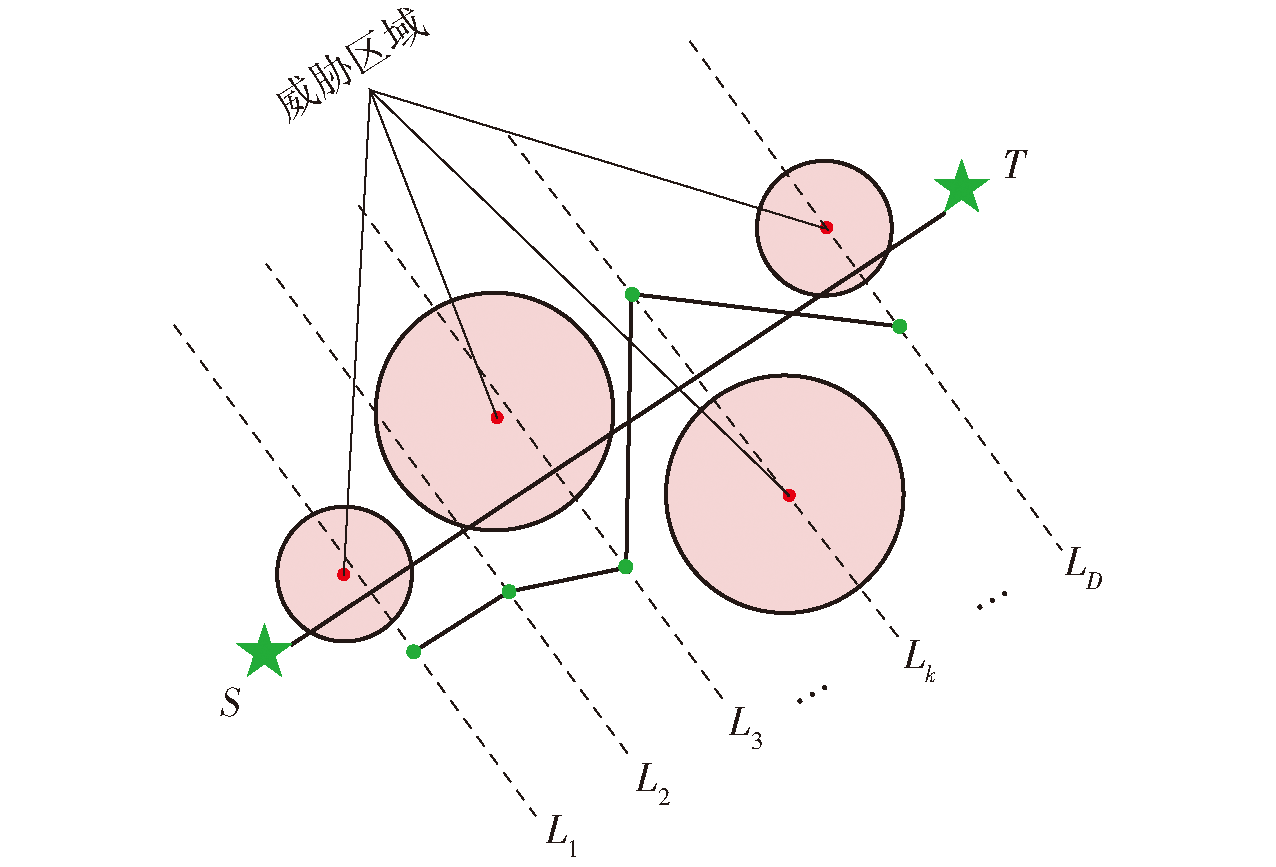
Fig.2 Two-dimensional schematic diagram of UAV path planning
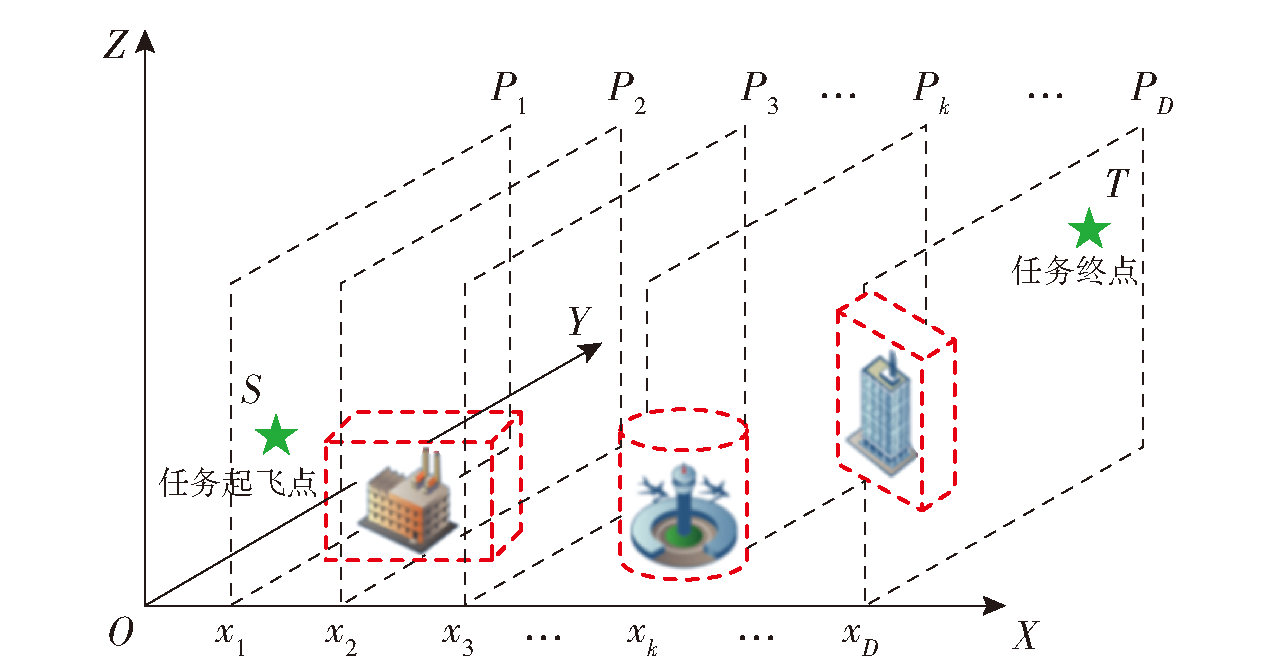
Fig.3 Three-dimensional schematic diagram of UAV path planning
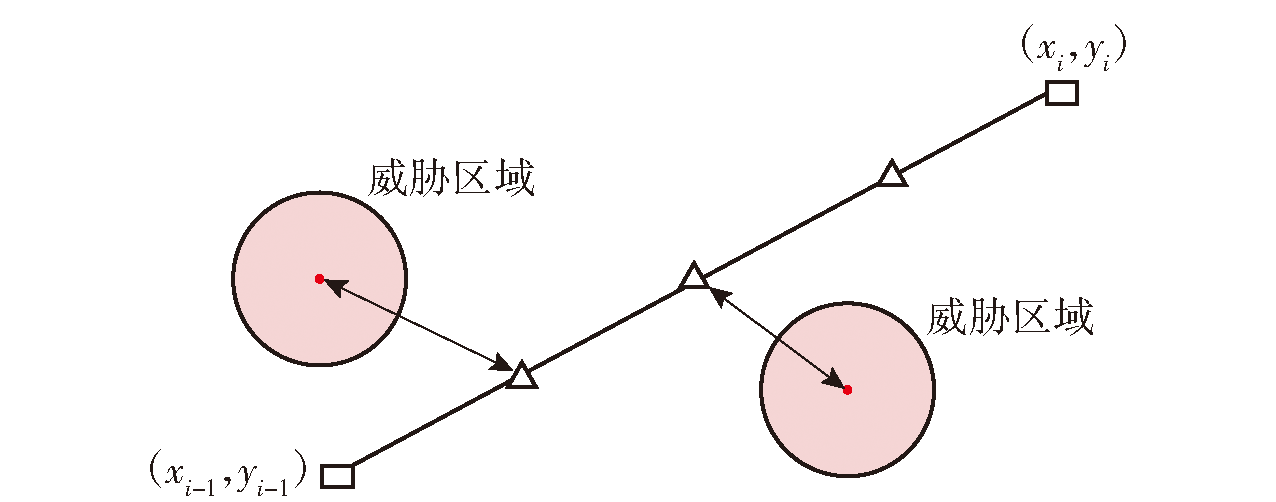
Fig.4 Calculation of threat measure
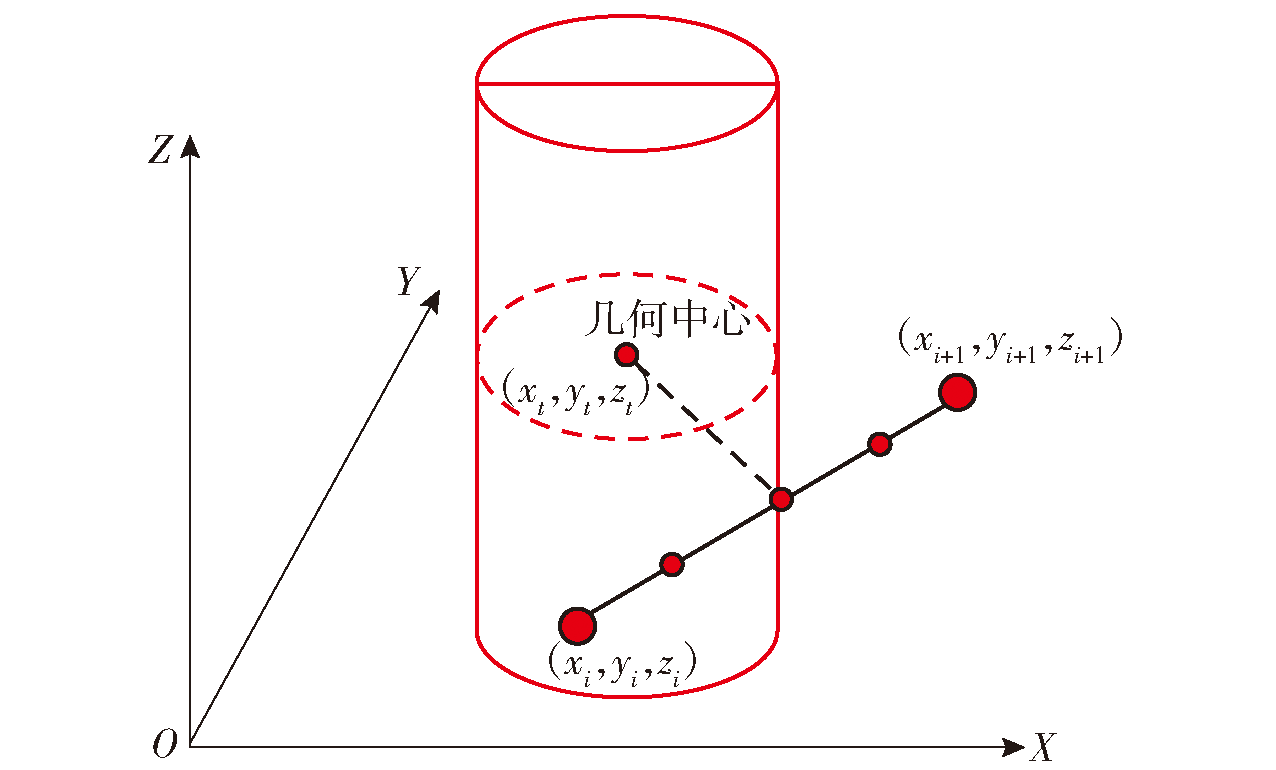
Fig.5 Calculation of three-dimensional threat measure
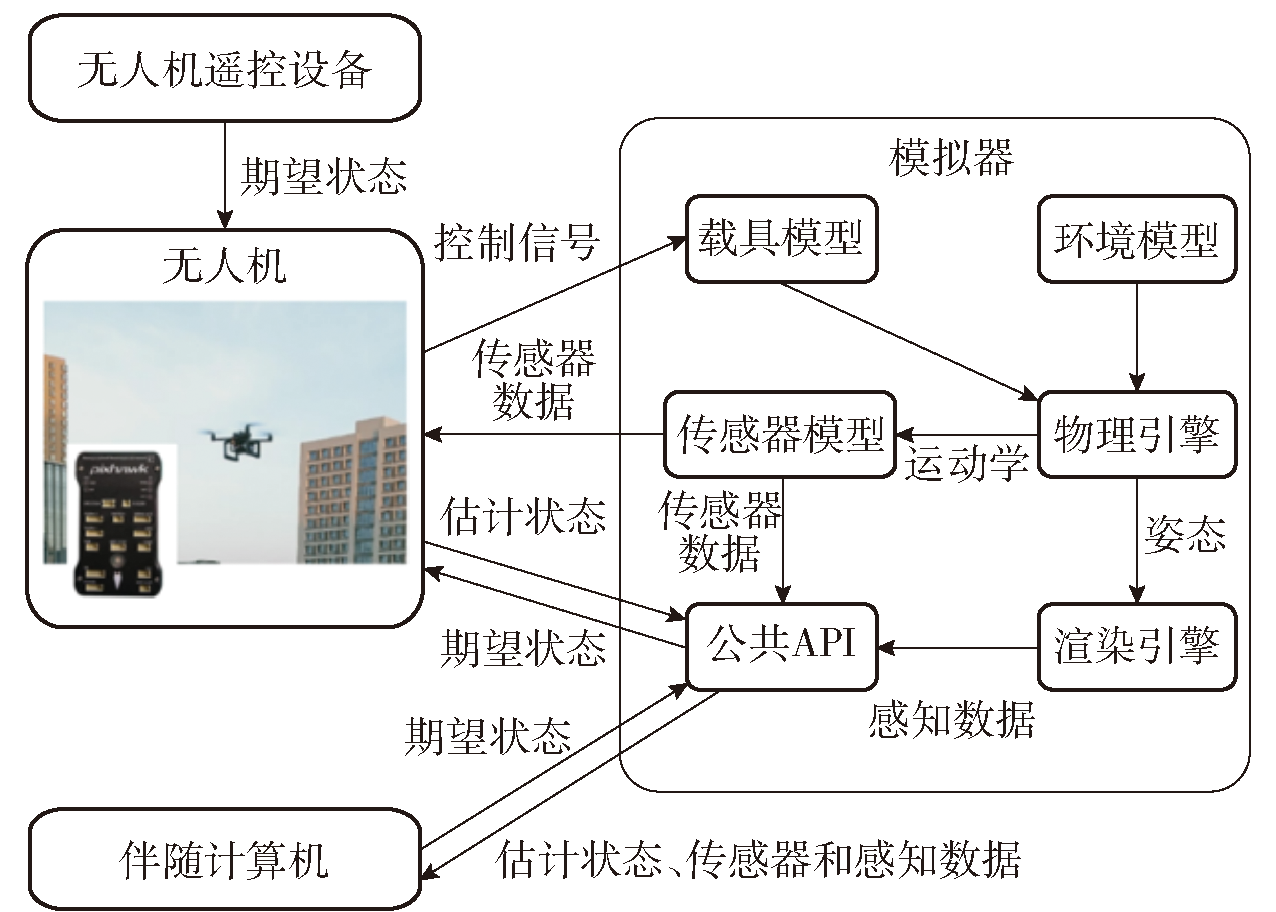
Fig.6 AirSim overall framework
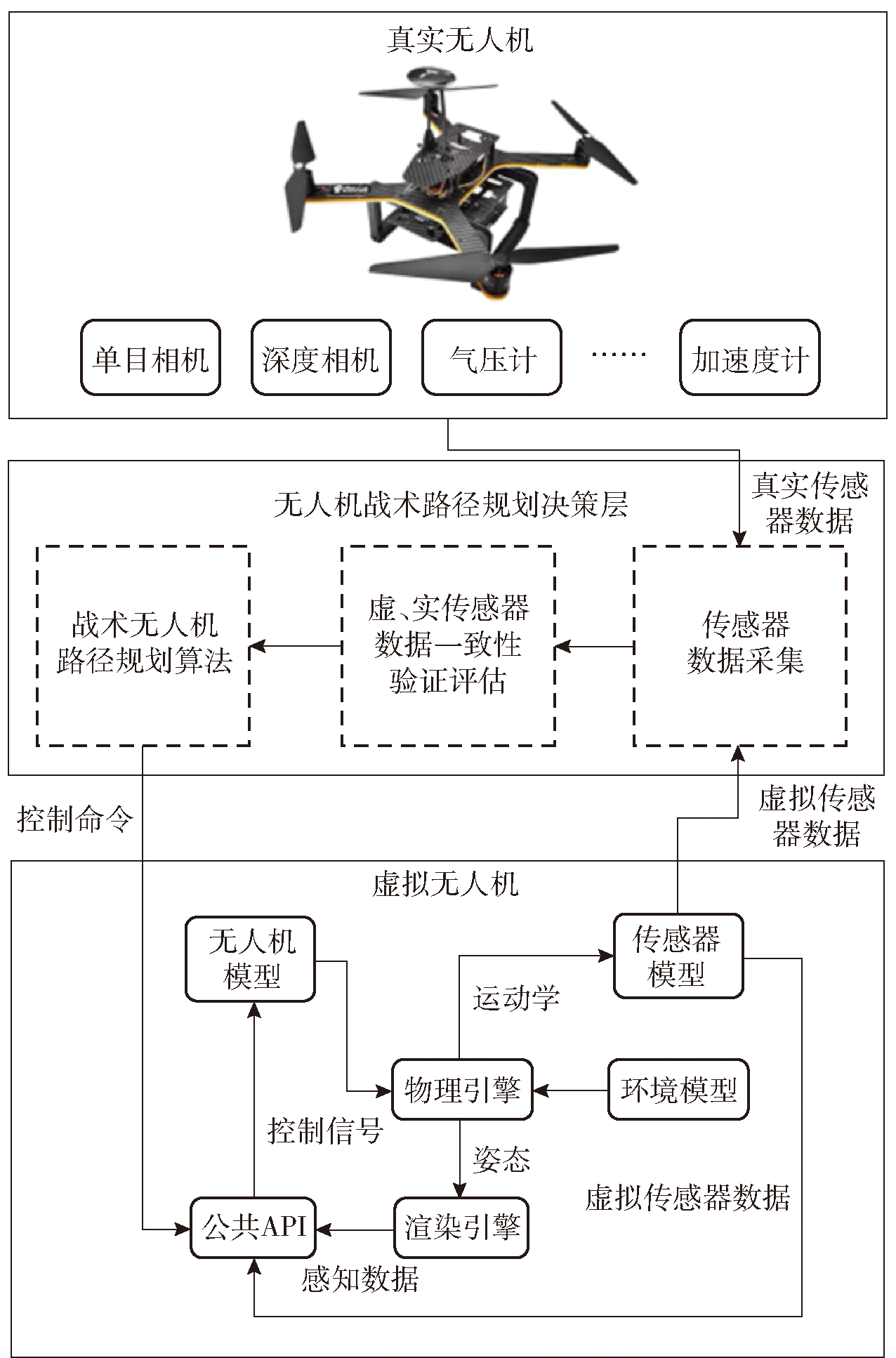
Fig.7 Simulation platform frame diagram
| 案例 | 威胁中心/m | 威胁半径/m | 高度/m |
|---|---|---|---|
| (350,100) | 80 | 500 | |
| (200,600) | 150 | 800 | |
| (600,150) | 100 | 500 | |
| 案例1 | (450,800) | 75 | 300 |
| (680,400) | 120 | 500 | |
| (850,600) | 70 | 750 | |
| (150,250) | 80 | 700 | |
| (750,800) | 100 | 1000 | |
| (200,200) | 100 | 1000 | |
| (380,450) | 150 | 1000 | |
| (550,150) | 125 | 650 | |
| 案例2 | (250,750) | 150 | 800 |
| (750,450) | 100 | 600 | |
| (800,250) | 150 | 850 | |
| (500,700) | 150 | 1000 | |
| (800,850) | 100 | 750 |
Table 1 Threat area information
| 案例 | 威胁中心/m | 威胁半径/m | 高度/m |
|---|---|---|---|
| (350,100) | 80 | 500 | |
| (200,600) | 150 | 800 | |
| (600,150) | 100 | 500 | |
| 案例1 | (450,800) | 75 | 300 |
| (680,400) | 120 | 500 | |
| (850,600) | 70 | 750 | |
| (150,250) | 80 | 700 | |
| (750,800) | 100 | 1000 | |
| (200,200) | 100 | 1000 | |
| (380,450) | 150 | 1000 | |
| (550,150) | 125 | 650 | |
| 案例2 | (250,750) | 150 | 800 |
| (750,450) | 100 | 600 | |
| (800,250) | 150 | 850 | |
| (500,700) | 150 | 1000 | |
| (800,850) | 100 | 750 |

Fig.8 Case 1:three-dimensional path planning
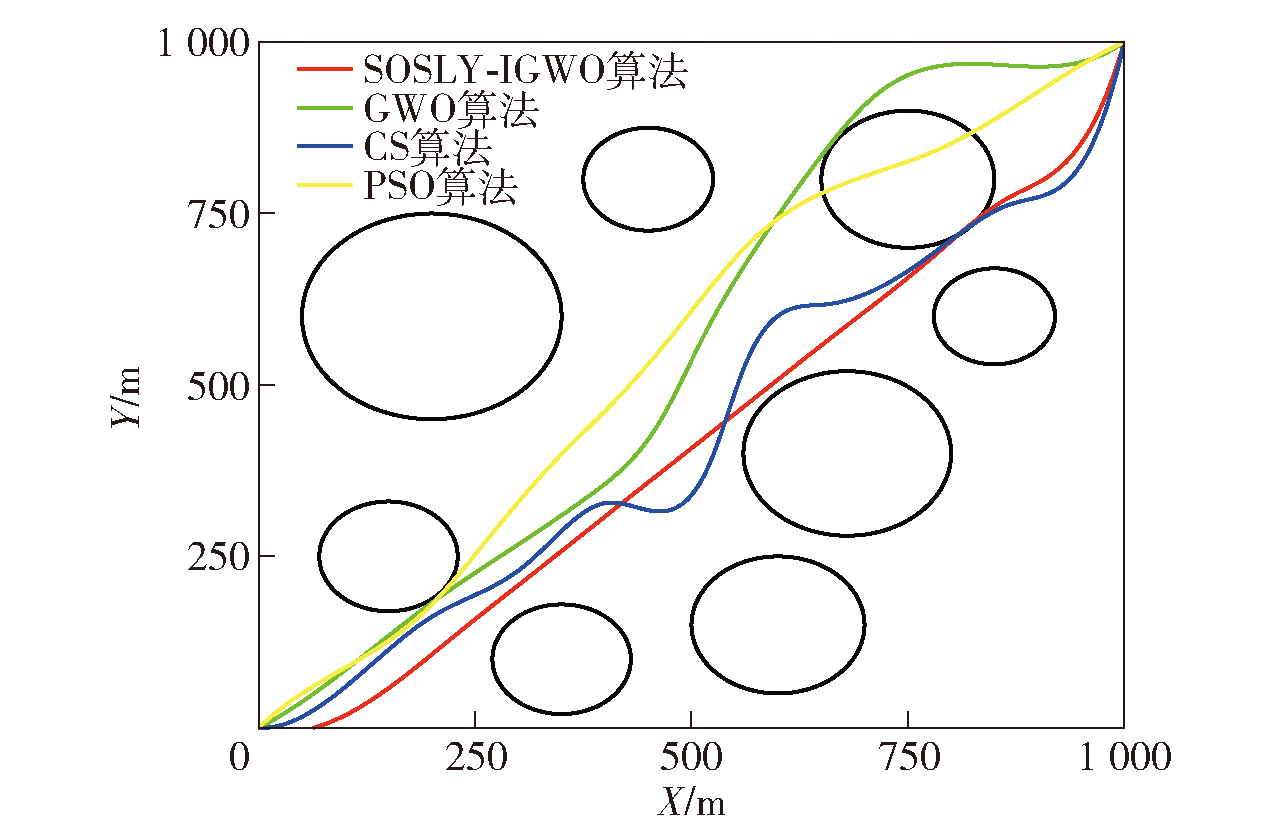
Fig.9 Case 1:top view of three-dimensional path planning

Fig.10 Case 2:three-dimensional path planning
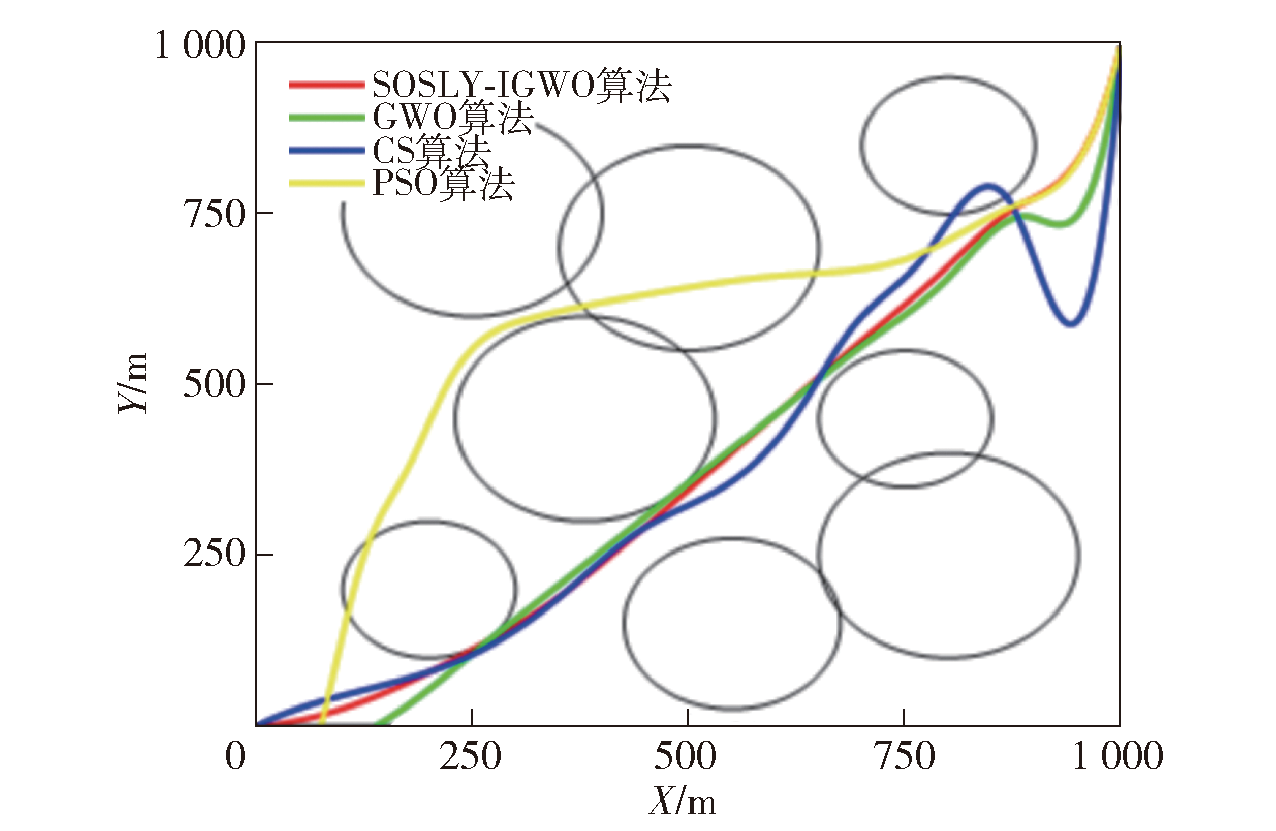
Fig.11 Case 2:top view of three-dimensional path planning
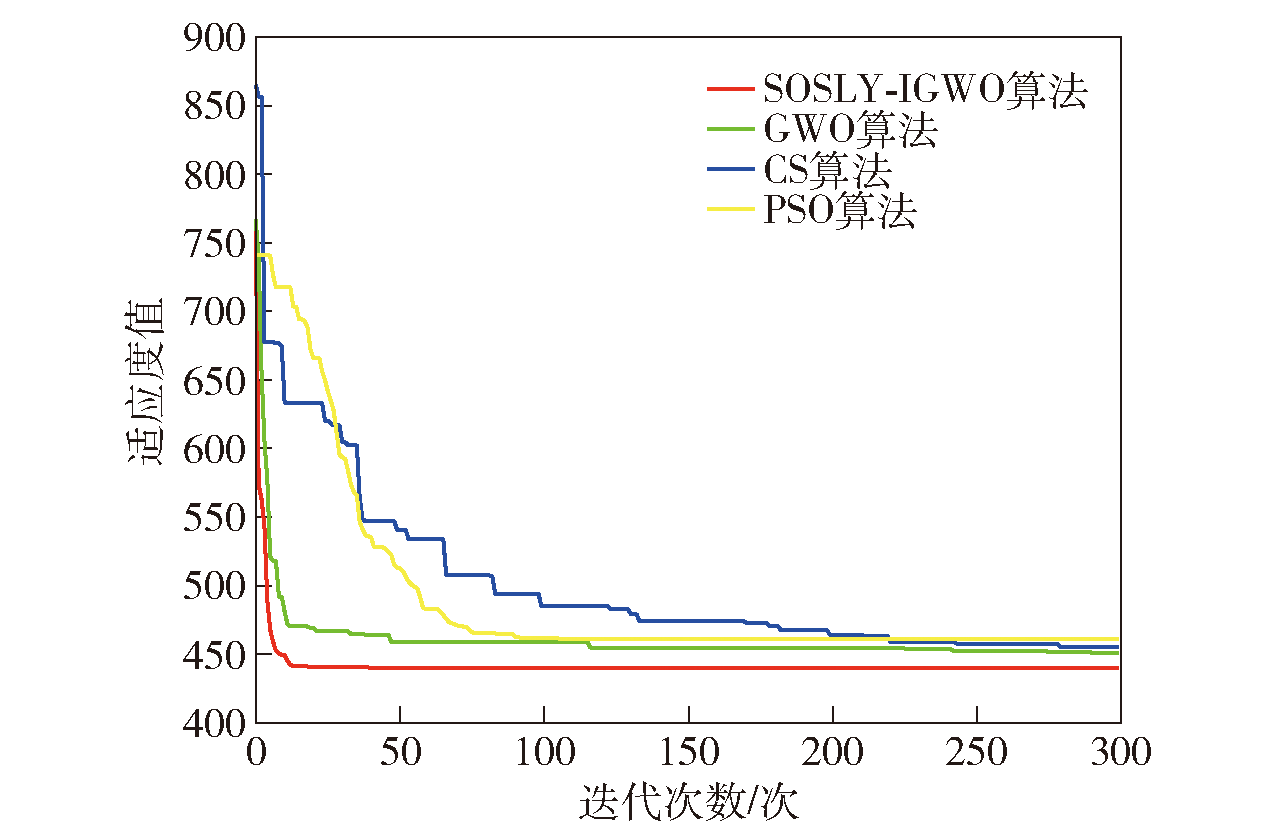
Fig.12 Case 1: convergence curves
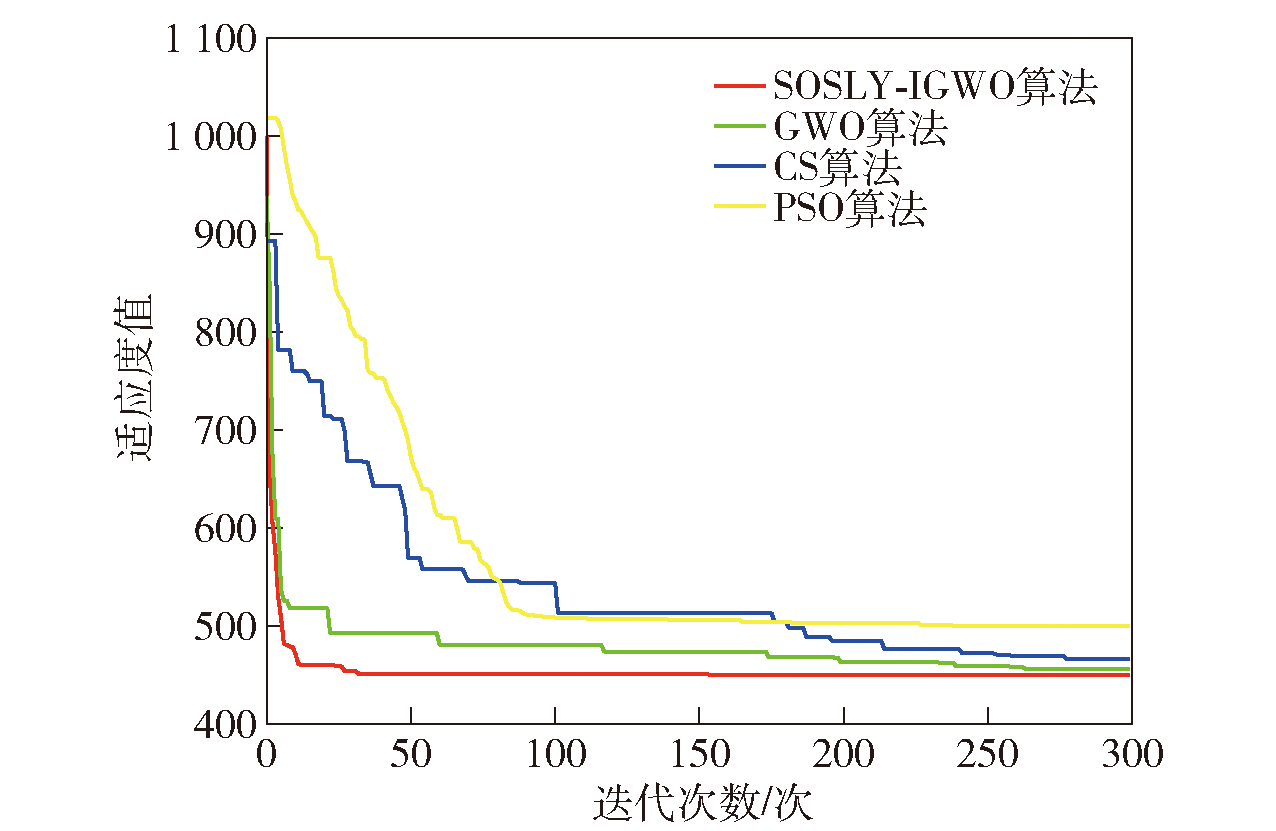
Fig.13 Case 2: convergence curves
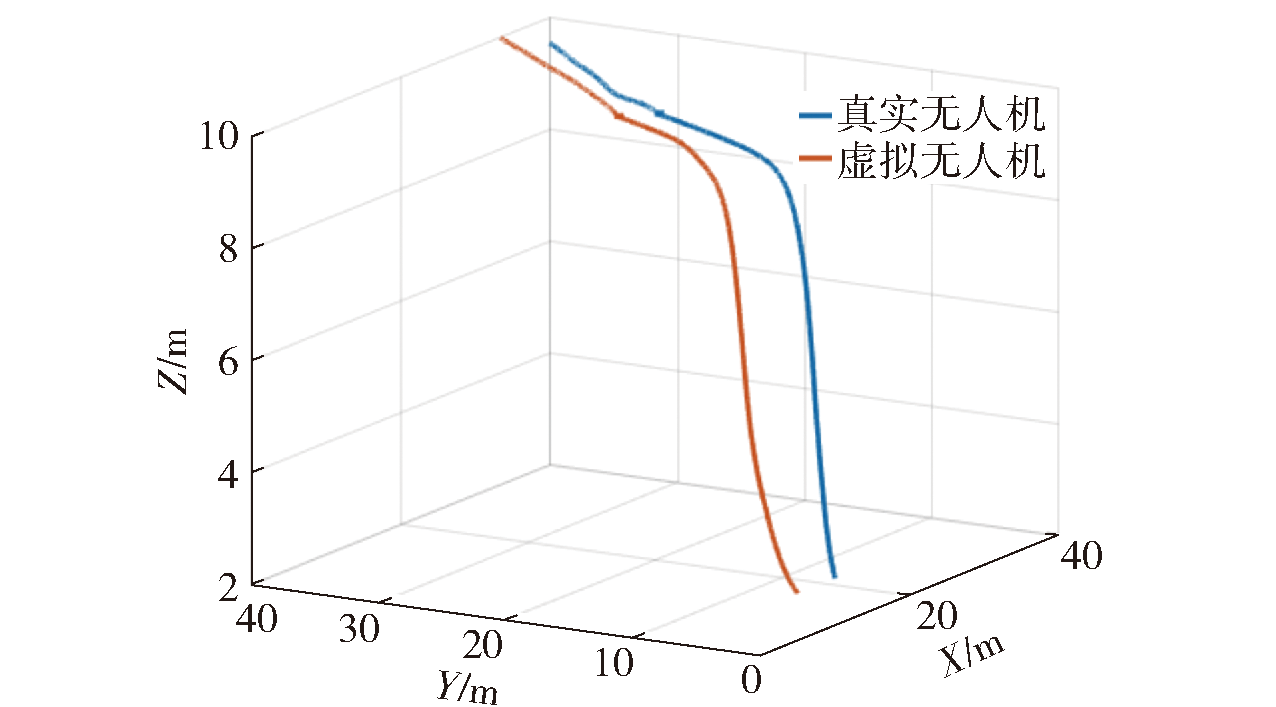
Fig.14 Comparison of motion trajectories
| x轴运动轨迹误差 率平均值 | y轴运动轨迹误差 率平均值 | z轴运动轨迹误差 率平均值 |
|---|---|---|
| 0.2494 | 0.2392 | 0.2420 |
Table 2 Average error rate of motion trajectories of sampled real and virtual UAVs in each axis direction
| x轴运动轨迹误差 率平均值 | y轴运动轨迹误差 率平均值 | z轴运动轨迹误差 率平均值 |
|---|---|---|
| 0.2494 | 0.2392 | 0.2420 |
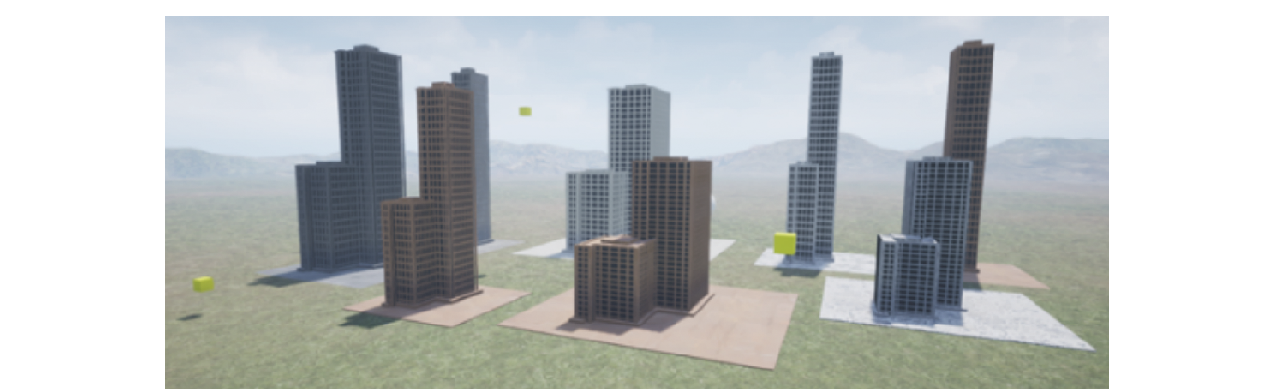
Fig.15 UE4 Scenario
| 任务 目标点 | 起始点/m | 任务目 标点/m | 移动威胁运动 方向/(m·s-1) |
|---|---|---|---|
| 1 | (0, 0, 0) | (81, 25, 10) | (0, 1, 0) |
| 2 | (0, 0, 0) | (55, 57, 20) | (1, 0, 0) |
| 3 | (0, 0, 0) | (85, 70, 4) | (0, 0, 1) |
Table 3 Task target point information
| 任务 目标点 | 起始点/m | 任务目 标点/m | 移动威胁运动 方向/(m·s-1) |
|---|---|---|---|
| 1 | (0, 0, 0) | (81, 25, 10) | (0, 1, 0) |
| 2 | (0, 0, 0) | (55, 57, 20) | (1, 0, 0) |
| 3 | (0, 0, 0) | (85, 70, 4) | (0, 0, 1) |

Fig.16 UAV moving towards target point 1
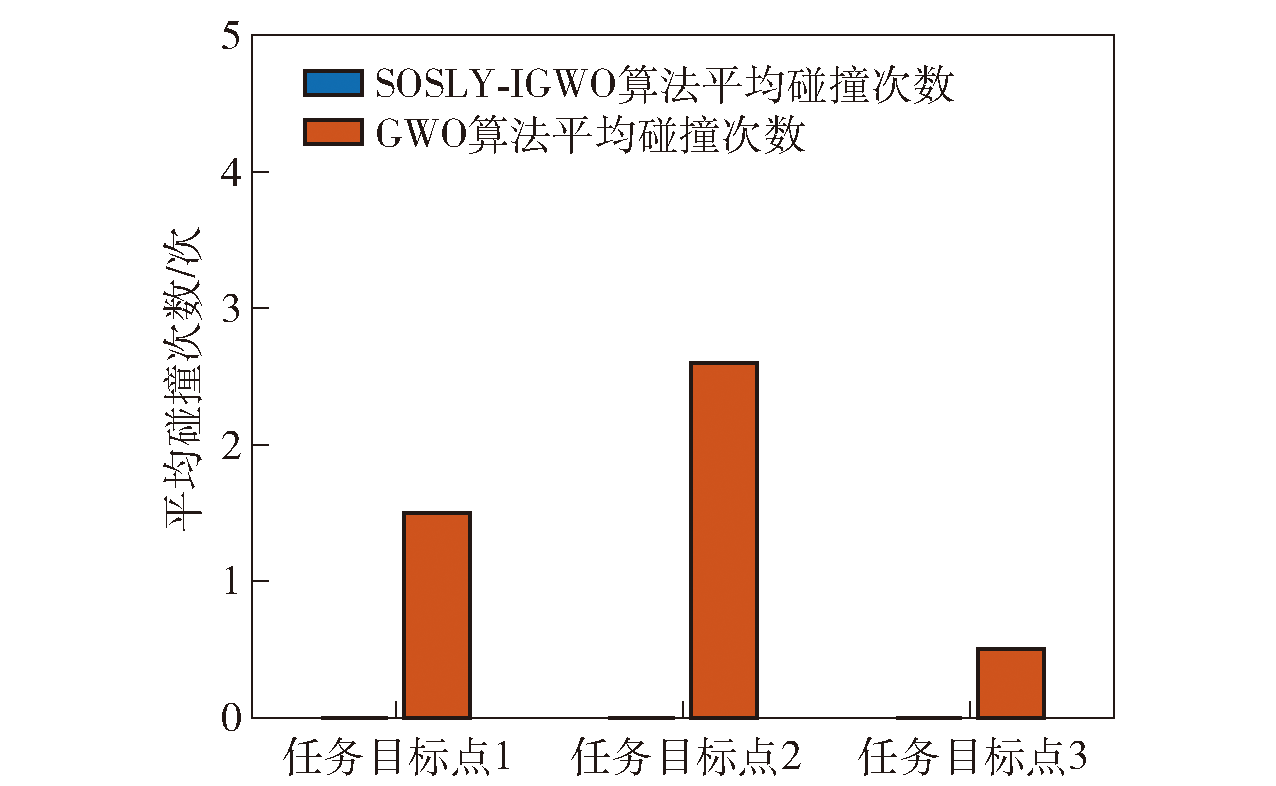
Fig.17 Mean number of collisions
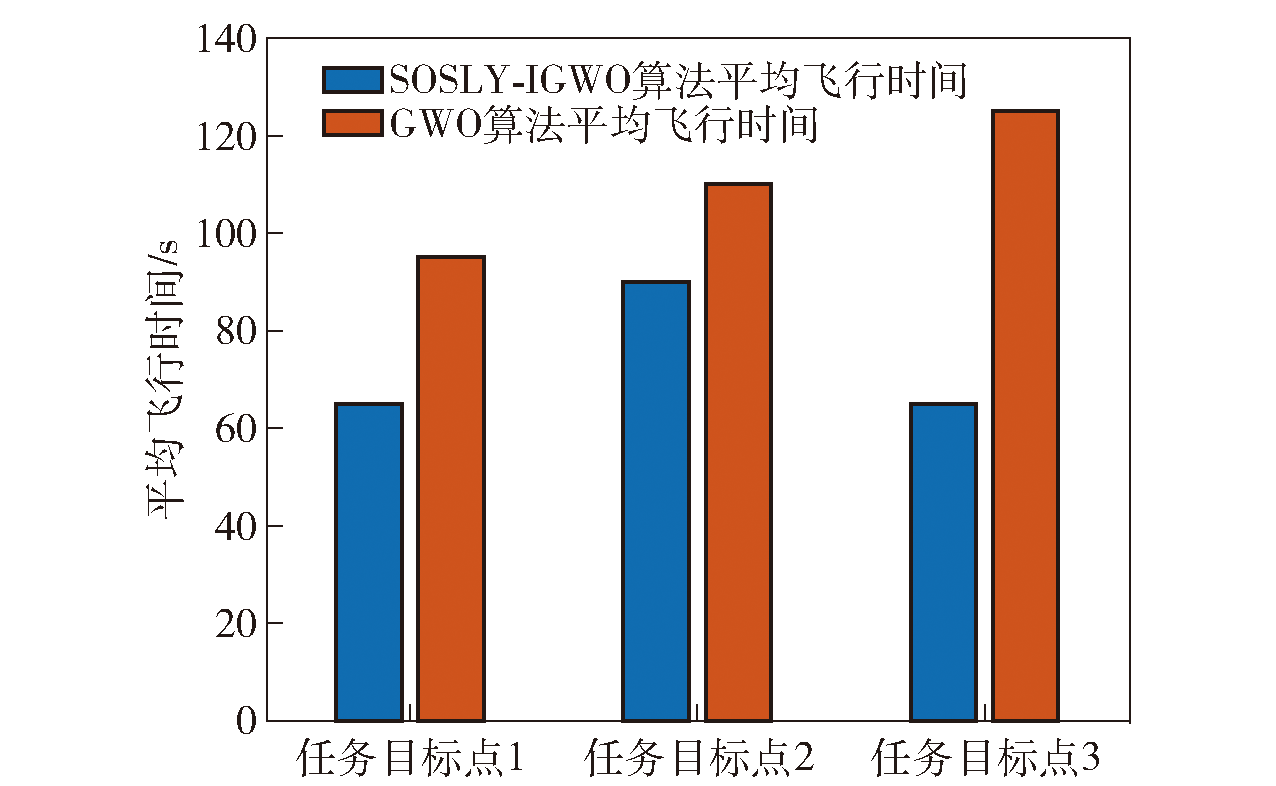
Fig.18 Mean flight time
| [1] |
张文昌. 运用与思考[J]. 国防科技工业, 2023(4):47-49.
|
|
|
|
| [2] |
|
| [3] |
白玉. 四旋翼无人机的应用与发展综述[J]. 广西农业机械化, 2020(2):7,9.
|
|
|
|
| [4] |
刘永琦, 徐丹, 程归, 等. 基于改进A*算法的无人机快速轨迹规划方法[J]. 飞行力学, 2020, 38(2): 40-46.
|
|
|
|
| [5] |
doi: 10.1016/j.comcom.2019.10.014 URL |
| [6] |
尹依伊, 王晓芳, 周健. 基于Q学习的多协同航迹规划方法[J]. 兵工学报, 2023, 44(2): 484-495.
doi: 10.12382/bgxb.2021.0606 |
|
doi: 10.12382/bgxb.2021.0606 |
|
| [7] |
doi: 10.3390/app13095234 URL |
| [8] |
郭晓静, 杨卓橙. 基于邻域拓展的静态路径规划A*算法研究[J]. 计算机工程与应用, 2022, 58(8):168-174.
doi: 10.3778/j.issn.1002-8331.2010-0222 |
|
|
|
| [9] |
陈智康, 刘佳, 王丹丹, 等. 改进Dijkstra机器人路径规划算法研究[J]. 天津职业技术师范大学学报, 2020, 30(3):30-35.
|
|
|
|
| [10] |
傅亮, 刘峰, 刘书勇, 等. 基于改进D*Lite的二维路径连续动态规划算法[J/OL]. 无线电通信技术, 2023(2023-11-13).[2023-11-30]. http://kns.cnki.net/kcms/detail/13.1099.TN.20231101.1357.002.html.
|
|
|
|
| [11] |
doi: 10.1109/Access.6287639 URL |
| [12] |
doi: 10.1007/s10489-018-1384-y |
| [13] |
doi: 10.3390/su13063208 URL |
| [14] |
王永琦, 江潇潇. 基于混合灰狼算法的机器人路径规划[J]. 计算机工程与科学, 2020, 42(7): 1294-1301.
|
|
|
|
| [15] |
doi: 10.1016/j.neucom.2015.07.044 URL |
| [16] |
|
| [17] |
doi: 10.1016/j.advengsoft.2013.12.007 URL |
| [18] |
GOLDANLOO,
doi: 10.1007/s11227-021-04015-9 |
| [19] |
李阳, 李维刚, 赵云涛, 等. 基于莱维飞行和随机游动策略的灰狼算法[J]. 计算机科学, 2020, 47(8): 291-296.
doi: 10.11896/jsjkx.190600107 |
|
|
|
| [20] |
|
| [1] | LIN Sen, WANG Jingang, GAO Hongwei. Battlefield Image Dehazing Based on Global Compensation Attention Mechanism [J]. Acta Armamentarii, 2024, 45(4): 1344-1353. |
| [2] | ZHAI Sikuan, LIU Jianhua, ZHUANG Cunbo. Knowledge-based Rapid Preparation Method for Complex Product Assembly Process [J]. Acta Armamentarii, 2024, 45(4): 1332-1343. |
| [3] | YANG Haowei, GONG Peng, ZHANG Jihao, WANG Weidong, TANG Feixi, ZHOU Zijiao, ZHANG Guangwei. Design and Implementation of Information Interactive Interface between QualNet and Virtual Machine for Link16 [J]. Acta Armamentarii, 2024, 45(4): 1186-1195. |
| [4] | ZHAO Xiaoqiang, CHENG Wei. Lightweight Image Super-resolution Reconstruction Based on Cross-fusion of Spatial Features [J]. Acta Armamentarii, 2024, 45(4): 1273-1284. |
| [5] | SONG Xiaoru, LIU Kang, GAO Song, CHEN Chaobo, YAN Kun. Research on Improved YOLOv5-based Military Target Recognition Algorithm Used in Complex Battlefield Environment [J]. Acta Armamentarii, 2024, 45(3): 934-947. |
| [6] | DING Xiwen, CHENG Hongchang, YUAN Yuan, SU Yue. Detection Method for Field-of-view Defect of Ultraviolet Image Intensifier Based on Improved SSD Algorithm [J]. Acta Armamentarii, 0, (): 0-0. |
| [7] | XU Yilan, GUO Tangyi, TANG Kun, ZHANG Yingying, LI Linwei. Evaluation of Node Value of Military Transportation Network Based on Hyper-networks [J]. Acta Armamentarii, 2024, 45(2): 552-563. |
| [8] | TIAN Daming, MIAO Pu. Visible Light Communication Nonlinear Equalizer Based on Model Solving and Deep Learning [J]. Acta Armamentarii, 2024, 45(2): 466-473. |
| [9] | YANG Jing, LU Minghua, GUO Liqiang, MA Jieqiong, WU Jinping, ZHANG Hui. Operational Decision Analysis and Optimization Method of Submarine Integrated Defense against Torpedo in Uncertain Environment [J]. Acta Armamentarii, 2024, 45(2): 564-573. |
| [10] | YUAN Bowen, LIU Dongbo, LIU Zhaopeng, YANG Weilong. Node Importance Ranking Method for Target SoS Network [J]. Acta Armamentarii, 2024, 45(2): 488-496. |
| [11] | YANG Di, ZHOU Ying, XIE Zhenping. Evaluation Method for Dynamic Effect of Camouflage Based on Battlefield Environment Twinning [J]. Acta Armamentarii, 2024, 45(1): 349-362. |
| [12] | Shen Ying, Huang Weida, Zhou Zebing, Huang Feng, Wang Shu. Contrast Enhancement for Camouflage Target Detection based on Characteristic Band Polarization Imaging [J]. Acta Armamentarii, 0, (): 0-0. |
| [13] | ZHAO Xiaoqiang, WANG Tao, SONG Zhaoyang, JIANG Hongmei, . Blind Restoration of Multi-Scale Image Algorithm Based on Saliency Region Detection [J]. Acta Armamentarii, 0, (): 0-0. |
| [14] | LI Ping, ZHOU Yu, CAO Ronggang, LI Fadong, CAO Yuxi, LI Jiawu, ZHANG Anqi. A Denoising Method for Complex Background Noise of Infrared Imaging Guidance System Based on Deep Learning and Dual-domain Fusion [J]. Acta Armamentarii, 0, (): 0-0. |
| [15] | DING Bosheng, ZHANG Ruiheng, XU Lixin, CHEN Huiming. Sand-dust Image Restoration Using Gray Compensation and Feature Fusion [J]. Acta Armamentarii, 2023, 44(10): 3115-3126. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||