
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 157-166.doi: 10.12382/bgxb.2023.0860
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
CAO Zhengyang1,2, ZHANG Bing1,*( ), BAI Yixuan3, GOU Kenan1
), BAI Yixuan3, GOU Kenan1
Received:2023-09-04
Online:2024-01-10
Contact:
ZHANG Bing
CLC Number:
CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information[J]. Acta Armamentarii, 2023, 44(S2): 157-166.
Add to citation manager EndNote|Ris|BibTeX
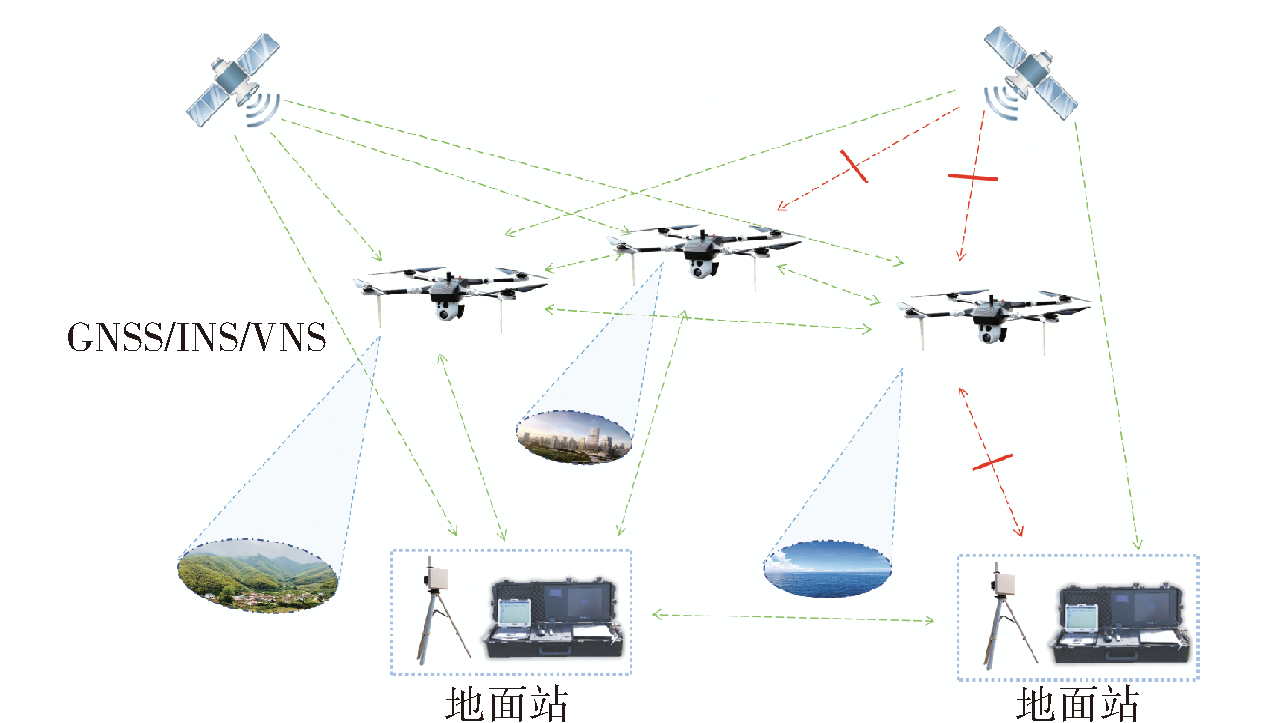
Fig.1 Schematic diagram of multi-UAV cooperative navigation system
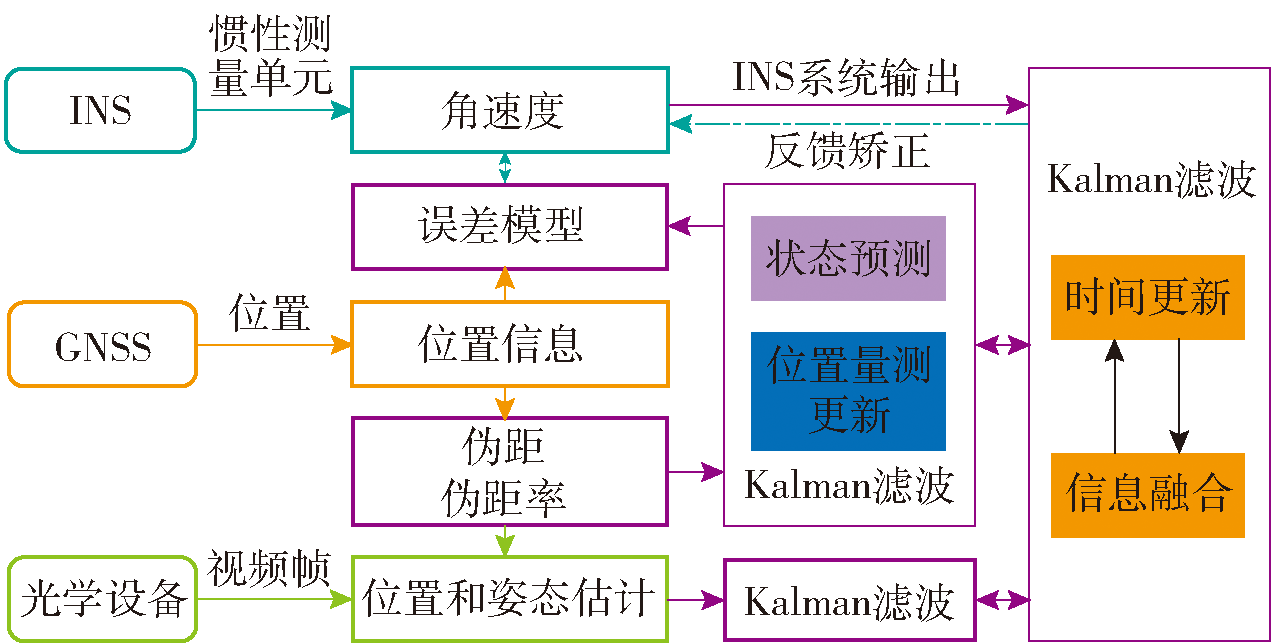
Fig.2 Schematic diagram of collaborative navigation framework
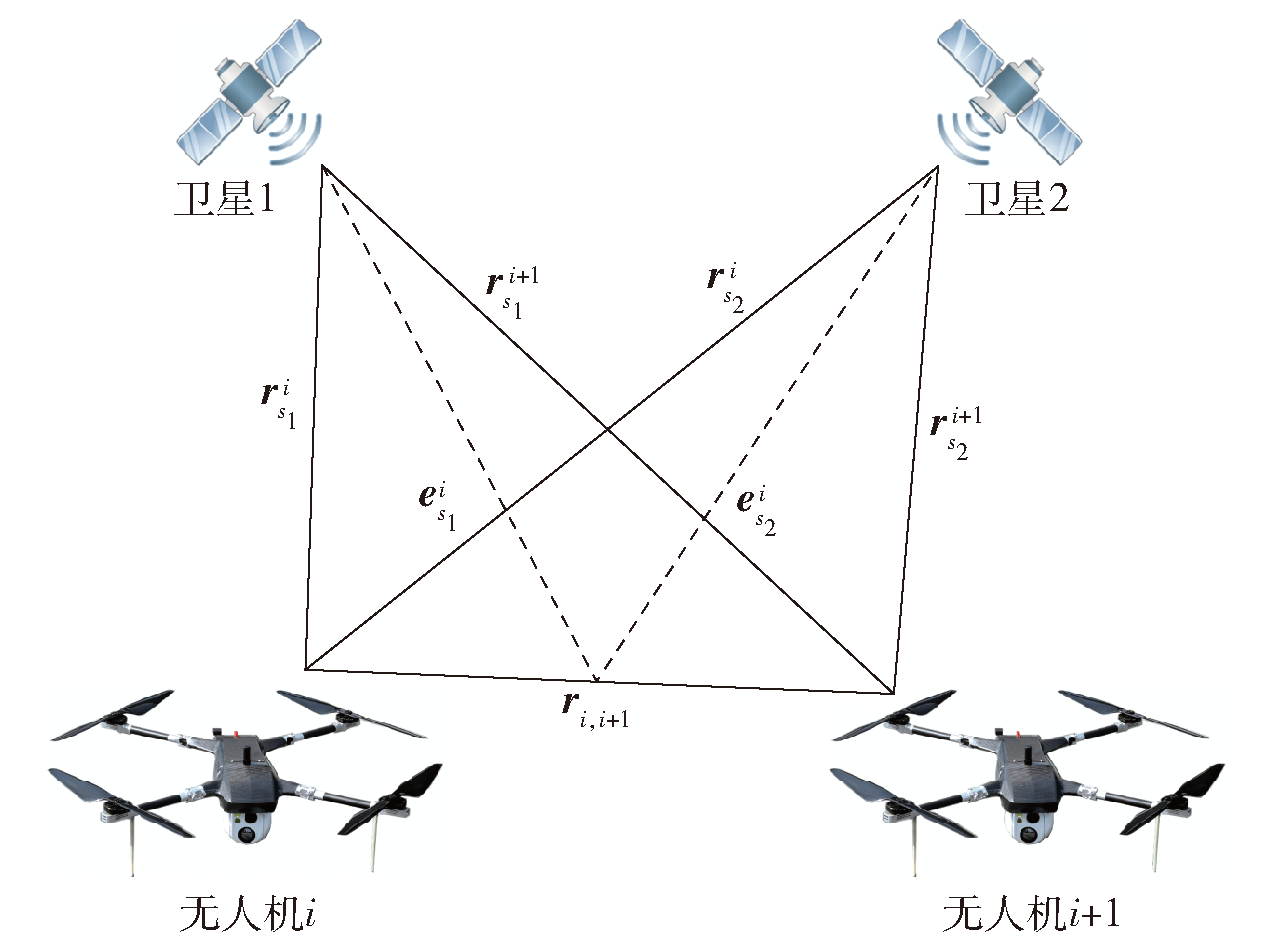
Fig.3 Pseudorange differential positioning diagram
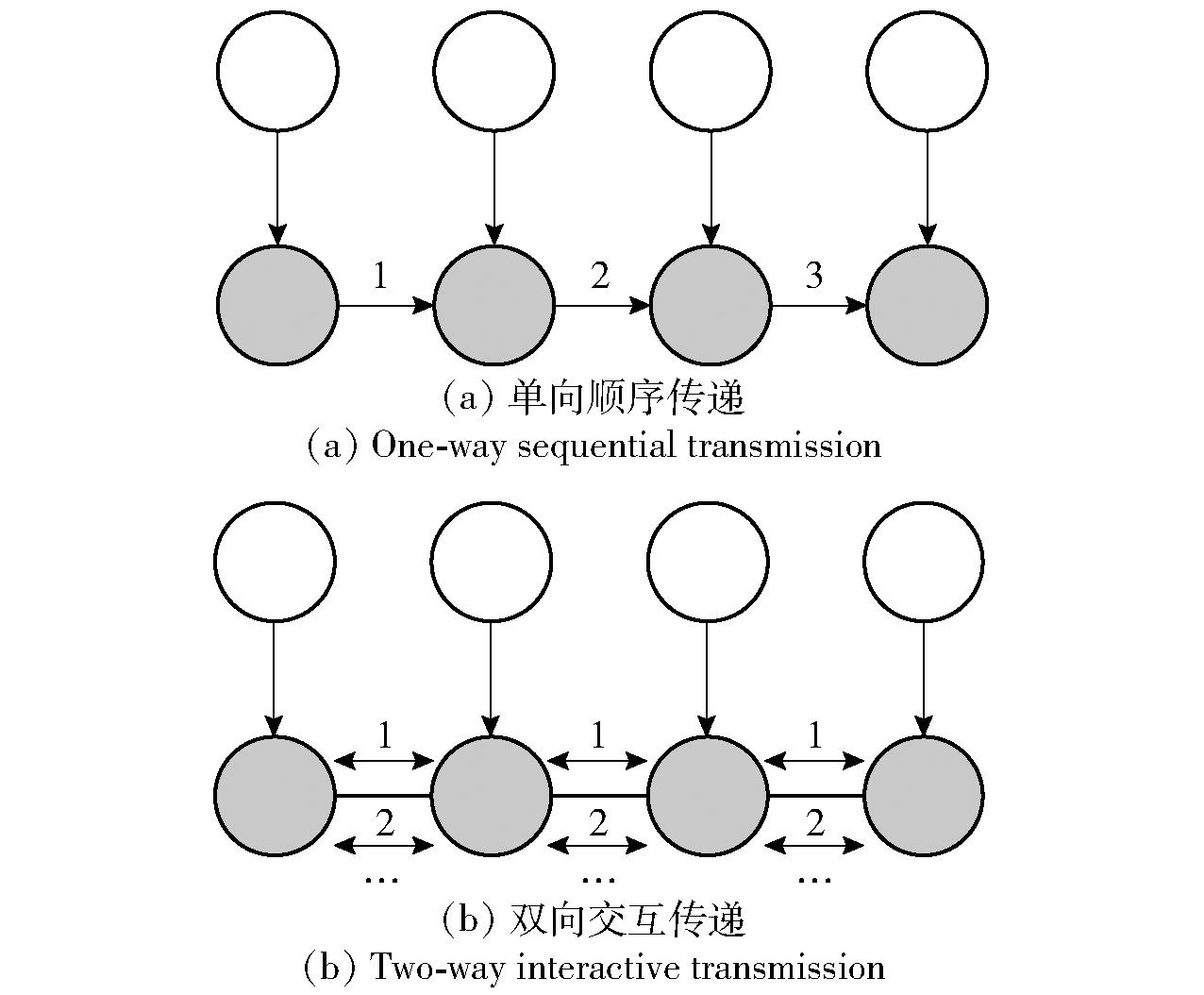
Fig.4 Schematic diagram of information exchange between nodes
| 陀螺仪 | 零漂:0.1(°)/h | 随机游走:0.01(°)/√h |
|---|---|---|
| 加速度计 | 零漂:100μg | 随机游走:5μg/√Hz |
| GPS | 伪距误差:3m | 伪距率误差:0.03m/s |
| 光电传感器 | 稳定精度:5μrad | 精度误差:0.35mm/pixel |
Table 1 Navigation devices parameters
| 陀螺仪 | 零漂:0.1(°)/h | 随机游走:0.01(°)/√h |
|---|---|---|
| 加速度计 | 零漂:100μg | 随机游走:5μg/√Hz |
| GPS | 伪距误差:3m | 伪距率误差:0.03m/s |
| 光电传感器 | 稳定精度:5μrad | 精度误差:0.35mm/pixel |
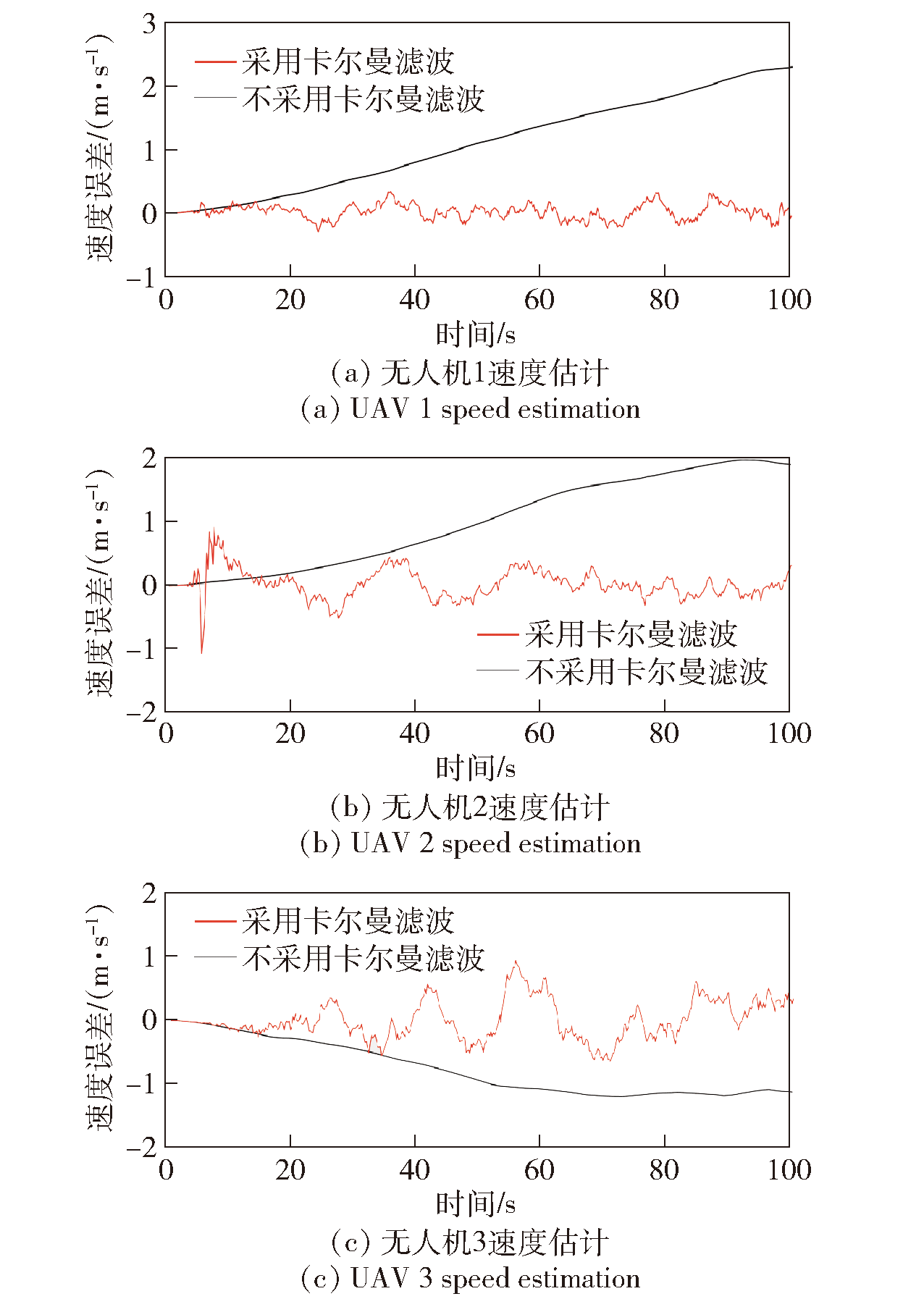
Fig.5 Comparison of speed estimation errors of Kalman filtering
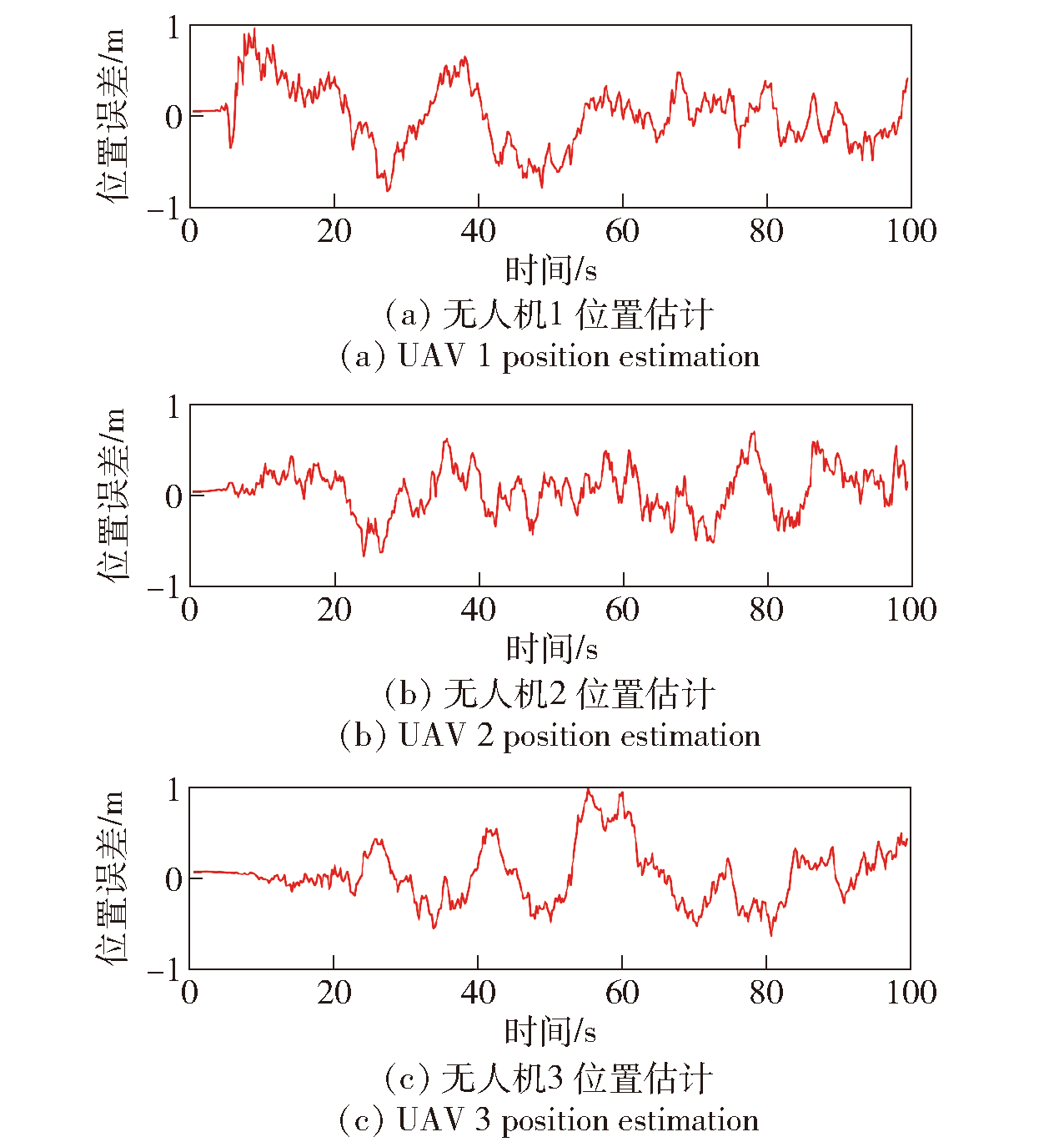
Fig.6 GNSS/INS/VNS position estimation error Testing
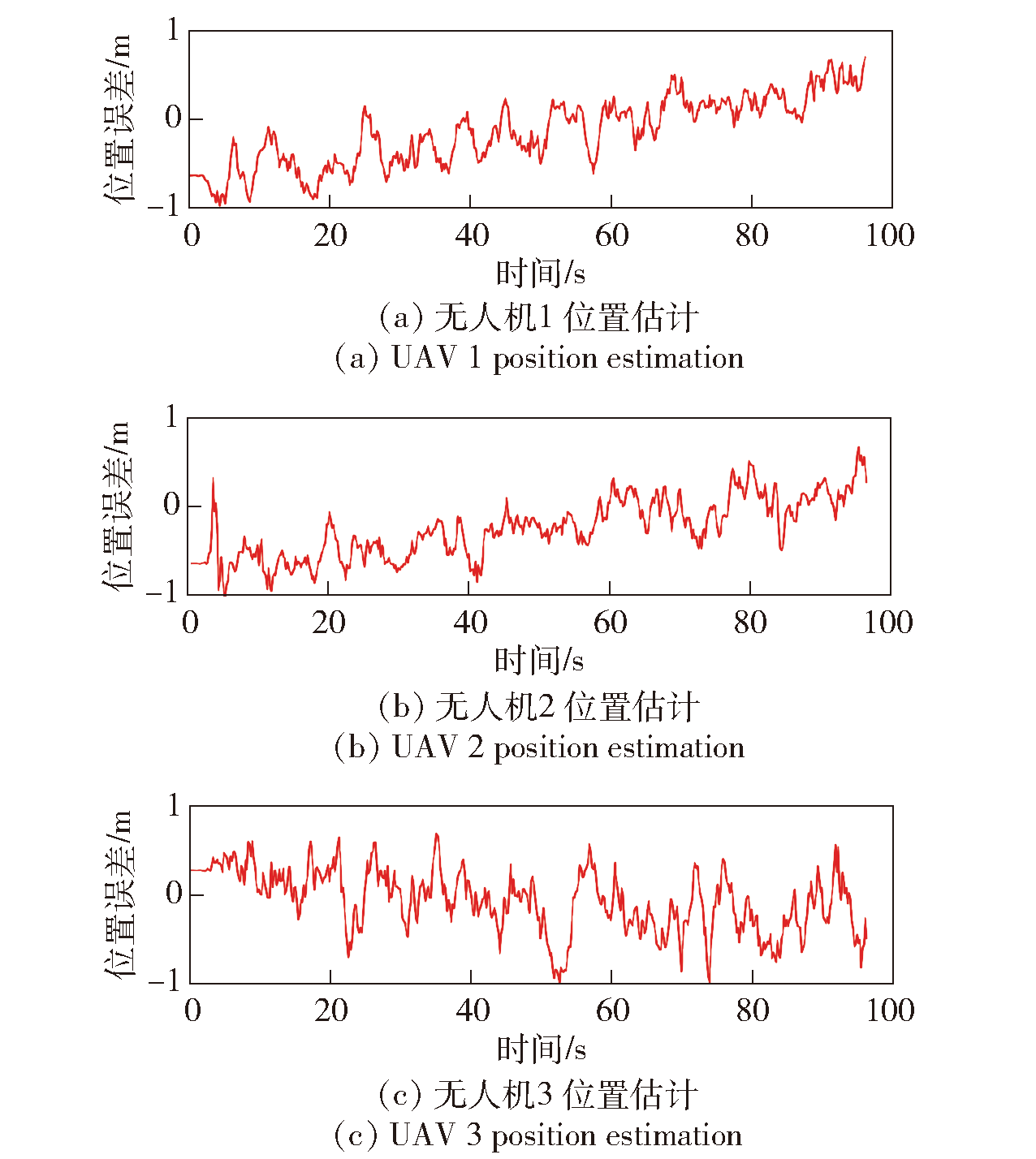
Fig.7 GPS position estimation error testing
| 定位方式 | 平均误差/m |
|---|---|
| GPS | 0.66 |
| GNSS/INS/VNS组合 | 0.25 |
Table 2 Positioning error comparison
| 定位方式 | 平均误差/m |
|---|---|
| GPS | 0.66 |
| GNSS/INS/VNS组合 | 0.25 |
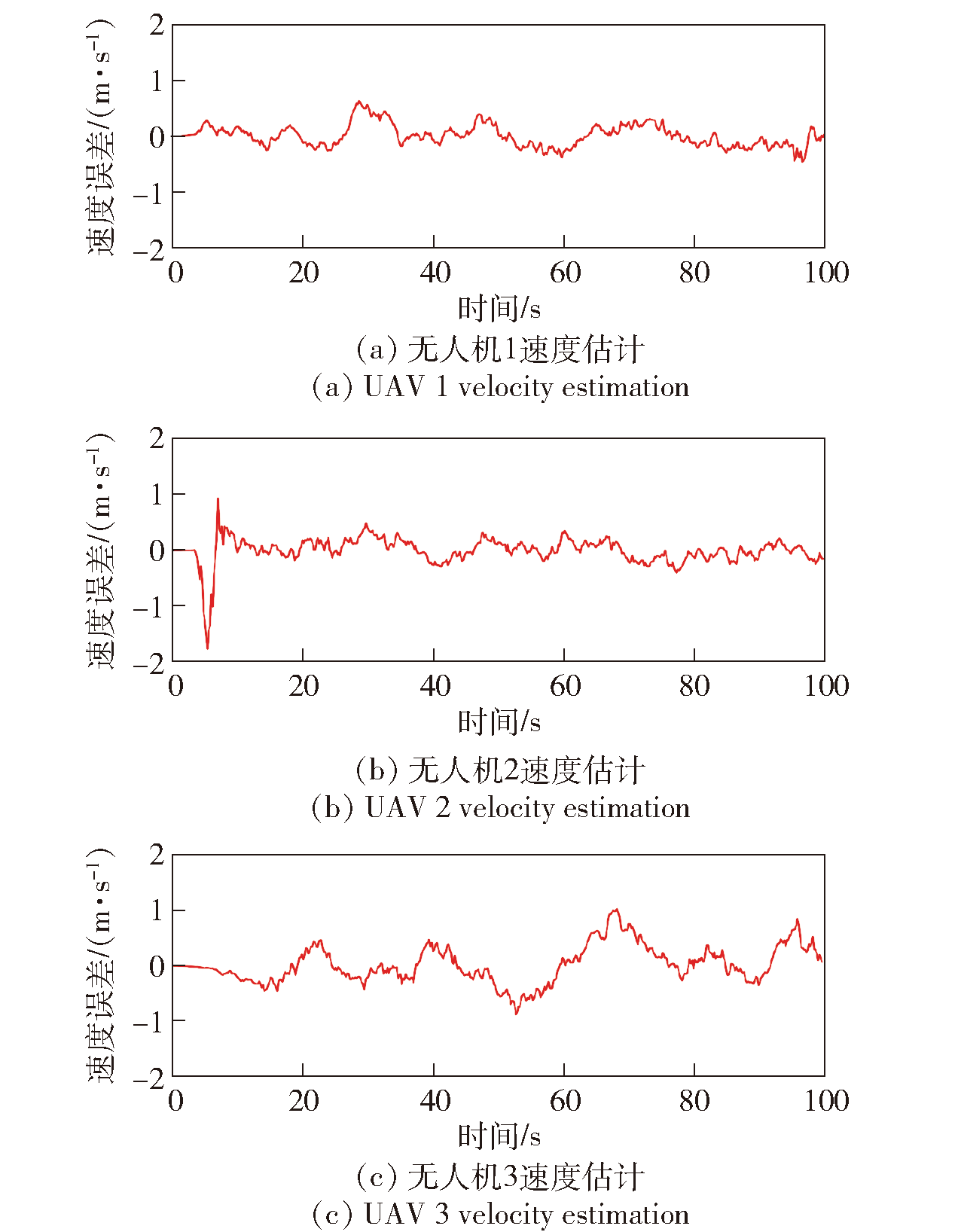
Fig.8 Velocity estimation error Testing
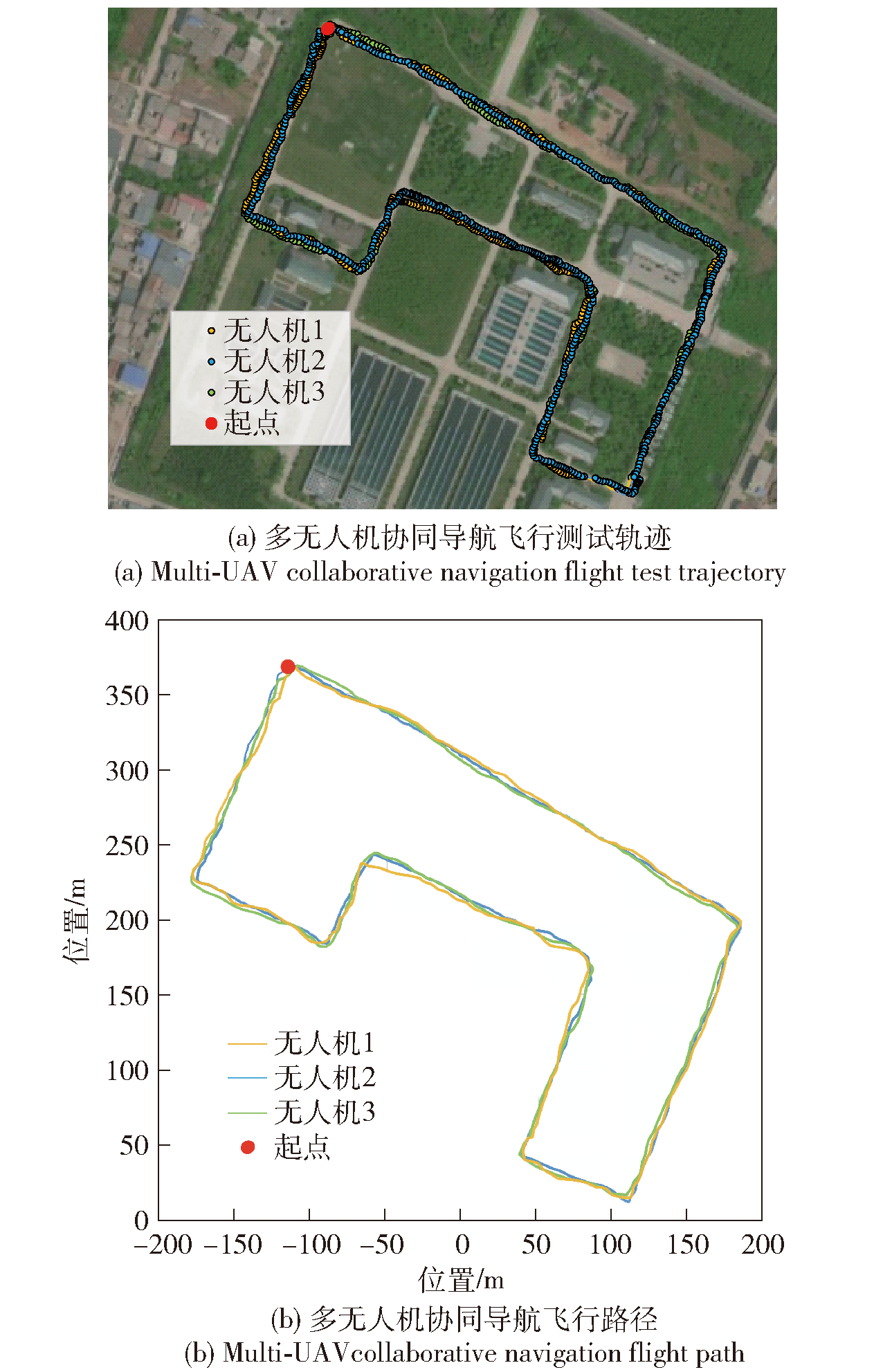
Fig.9 Schematic diagram of multi-UAVcollaborative navigation flight testing
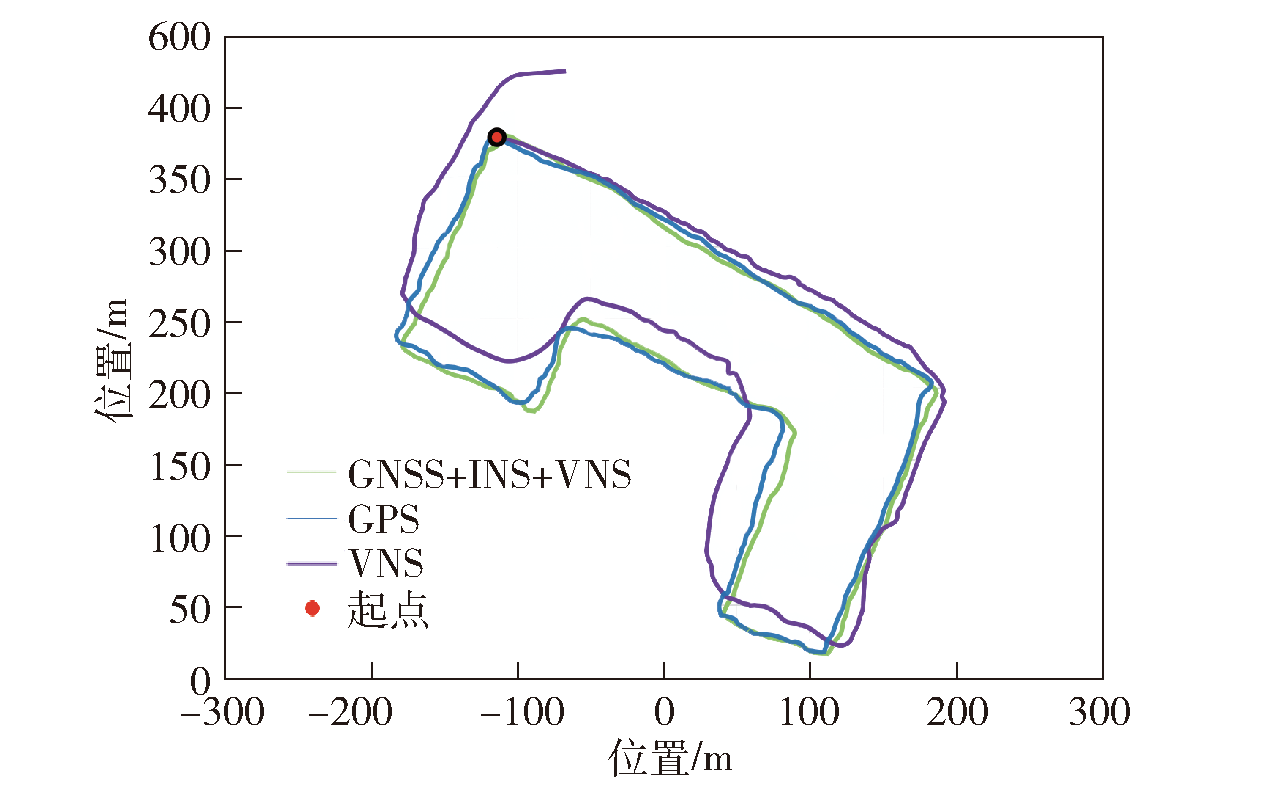
Fig.10 Robustness comparison test chart of collaborative navigation algorithms
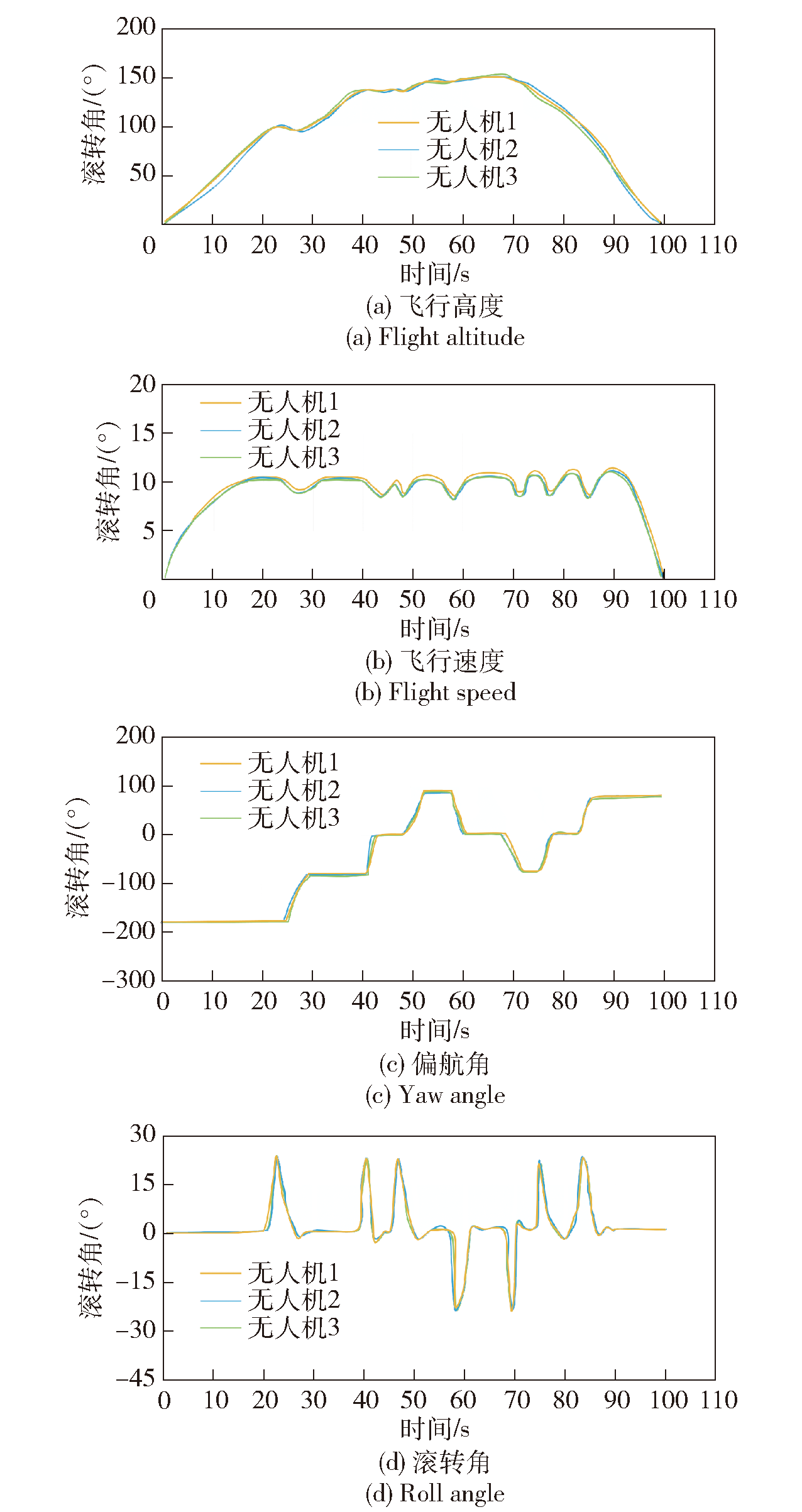
Fig.11 Test charts of collaborative navigation pose drift characteristics
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.324 | 0.483 | 0.467 |
| y | 6.057 | 1.948 | 1.985 |
| z | 1.380 | 0.594 | 0.617 |
Table 3 UAV 1absolute position error
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.324 | 0.483 | 0.467 |
| y | 6.057 | 1.948 | 1.985 |
| z | 1.380 | 0.594 | 0.617 |
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.544 | 0.563 | 0.559 |
| y | 3.249 | 1.873 | 1.867 |
| z | 1.651 | 0.682 | 0.674 |
Table 4 UAV 2 absolute position error
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.544 | 0.563 | 0.559 |
| y | 3.249 | 1.873 | 1.867 |
| z | 1.651 | 0.682 | 0.674 |
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.475 | 0.522 | 0.507 |
| y | 2.931 | 1.827 | 1.796 |
| z | 1.275 | 0.537 | 0.512 |
Table 5 UAV 3 absolute position error
| 方向 | 最大偏差/m | 平均偏差/m | 中间误差/m |
|---|---|---|---|
| x | 1.475 | 0.522 | 0.507 |
| y | 2.931 | 1.827 | 1.796 |
| z | 1.275 | 0.537 | 0.512 |
| [1] |
甄子洋. 舰载无人机自主着舰回收制导与控制研究进展[J]. 自动化学报, 2019, 45(4): 669-681.
|
|
|
|
| [2] |
doi: 10.1016/j.compag.2020.105695 URL |
| [3] |
doi: 10.1017/S037346332200025X URL |
| [4] |
|
| [5] |
|
| [6] |
范博洋, 赵高鹏, 薄煜明, 等. 多目标空地异构无人系统协同任务分配方法[J]. 兵工学报, 2023, 44(6): 1564-1575.
doi: 10.12382/bgxb.2022.0095 |
|
doi: 10.12382/bgxb.2022.0095 |
|
| [7] |
王孟阳, 张栋, 唐硕, 等. 基于动态联盟策略的无人机集群在线任务规划方法[J]. 兵工学报, 2023, 44(8): 2207-2223.
doi: 10.12382/bgxb.2022.0247 |
|
doi: 10.12382/bgxb.2022.0247 |
|
| [8] |
doi: 10.3390/drones6080208 URL |
| [9] |
doi: 10.1088/1742-6596/1650/3/032085 |
| [10] |
doi: 10.1088/1361-6501/ace19b |
| [11] |
doi: 10.3390/rs15153725 URL |
| [12] |
doi: 10.1109/MVT.2015.2481560 URL |
| [13] |
郑磊, 陈志敏, 贾宇轩. 基于广域部署智能反射面的无人机集群跟踪方法[J]. 兵工学报, 2023, 44(6): 1837-1845.
doi: 10.12382/bgxb.2022.0217 |
|
doi: 10.12382/bgxb.2022.0217 |
|
| [14] |
doi: 10.1016/j.ast.2017.09.024 URL |
| [15] |
doi: 10.1016/j.ast.2020.106068 URL |
| [16] |
doi: 10.1016/j.adhoc.2012.04.012 URL |
| [17] |
doi: 10.1109/LSP.2013.2290192 URL |
| [18] |
|
| [19] |
李松, 刘哲, 唐小妹, 等. 基于固定点迭代的Huber鲁棒容积卡尔曼滤波算法[J]. 计算机工程与应用, 2021, 57(16): 90-96.
doi: 10.3778/j.issn.1002-8331.2007-0105 |
|
|
|
| [20] |
宁静, 陈俊, 吴麒. 一种基于期望模型的自适应Singer模型滤波算法[J]. 电讯技术, 2022, 62(10): 1464-1469.
|
|
|
|
| [21] |
郝顺义, 卢航, 魏翔, 等. 简化高阶强跟踪容积卡尔曼滤波及其在组合导航中的应用[J]. 控制与决策, 2019, 34(10): 2105-2114.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
doi: 10.3390/app12115565 URL |
| [25] |
doi: 10.1109/JSEN.2022.3155166 URL |
| [26] |
doi: 10.3390/app13095790 URL |
| [27] |
万芯炜, 王晶, 杨辉, 等. BP神经网络结合粒子群优化卡尔曼滤波的MEMS陀螺随机误差补偿方法[J]. 兵工学报, 2023, 44(2): 556-565.
doi: 10.12382/bgxb.2022.0110 |
|
doi: 10.12382/bgxb.2022.0110 |
|
| [28] |
doi: 10.1109/TCST.2022.3174511 URL |
| [29] |
doi: 10.3390/rs13163328 URL |
| [30] |
BLAZQUEZ-GARCIAA, CONDEA,
|
| [31] |
doi: 10.3390/rs14174367 URL |
| [1] | HUANG Feng, WANG Weixiong, LIN Zhonglin, WU Xianyu, ZHUANG Jiaquan. Design and Experimental Study of a Novel Semi-physical Simulation Platform for Visual Navigation of Quadrotor UAVs [J]. Acta Armamentarii, 2023, 44(9): 2836-2848. |
| [2] | LI Zenglin, LI Bo, BAI Shuangxia, MENG Bobo. UAV Autonomous Air Combat Decision-making Based on AM-SAC [J]. Acta Armamentarii, 2023, 44(9): 2849-2858. |
| [3] | ZHANG Kun, LIU Zekun, HUA Shuai, ZHANG Zhenchong, LI Ke, YU Jingting. Generation of Multi-UAV Four-dimensional Cooperative Attack Route Based on T/S-SAS [J]. Acta Armamentarii, 2023, 44(6): 1576-1587. |
| [4] | GUAN Zhen-yu,LI Jie, YANG Huan, XU Bei-bei, LIU Chang. Research on Attitude Estimation of Micro UAV Based on Sparse Line Optical Flow Field [J]. Acta Armamentarii, 2014, 35(11): 1851-1859. |
| [5] | KOU Kun-hu, ZHANG You-an, LIU Ai-li. Cooperative Inertial Navigation System Error Correction and Accuracy Analysis of Multi-missiles [J]. Acta Armamentarii, 2013, 34(12): 1521-1528. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||