
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 52-60.doi: 10.12382/bgxb.2023.0937
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
GUO Zhiming1,2,*( ), LOU Wenzhong1, LI Tao2, ZHANG Mengyu2, BAI Zilong2, QIAO Hu3
), LOU Wenzhong1, LI Tao2, ZHANG Mengyu2, BAI Zilong2, QIAO Hu3
Received:2023-09-15
Online:2024-01-10
Contact:
GUO Zhiming
CLC Number:
GUO Zhiming, LOU Wenzhong, LI Tao, ZHANG Mengyu, BAI Zilong, QIAO Hu. Collaborative Route Planning of Multiple Unmanned Aerial Vehicles Considering Task Threats Based on Improved Grasshopper Optimization Algorithm[J]. Acta Armamentarii, 2023, 44(S2): 52-60.
Add to citation manager EndNote|Ris|BibTeX
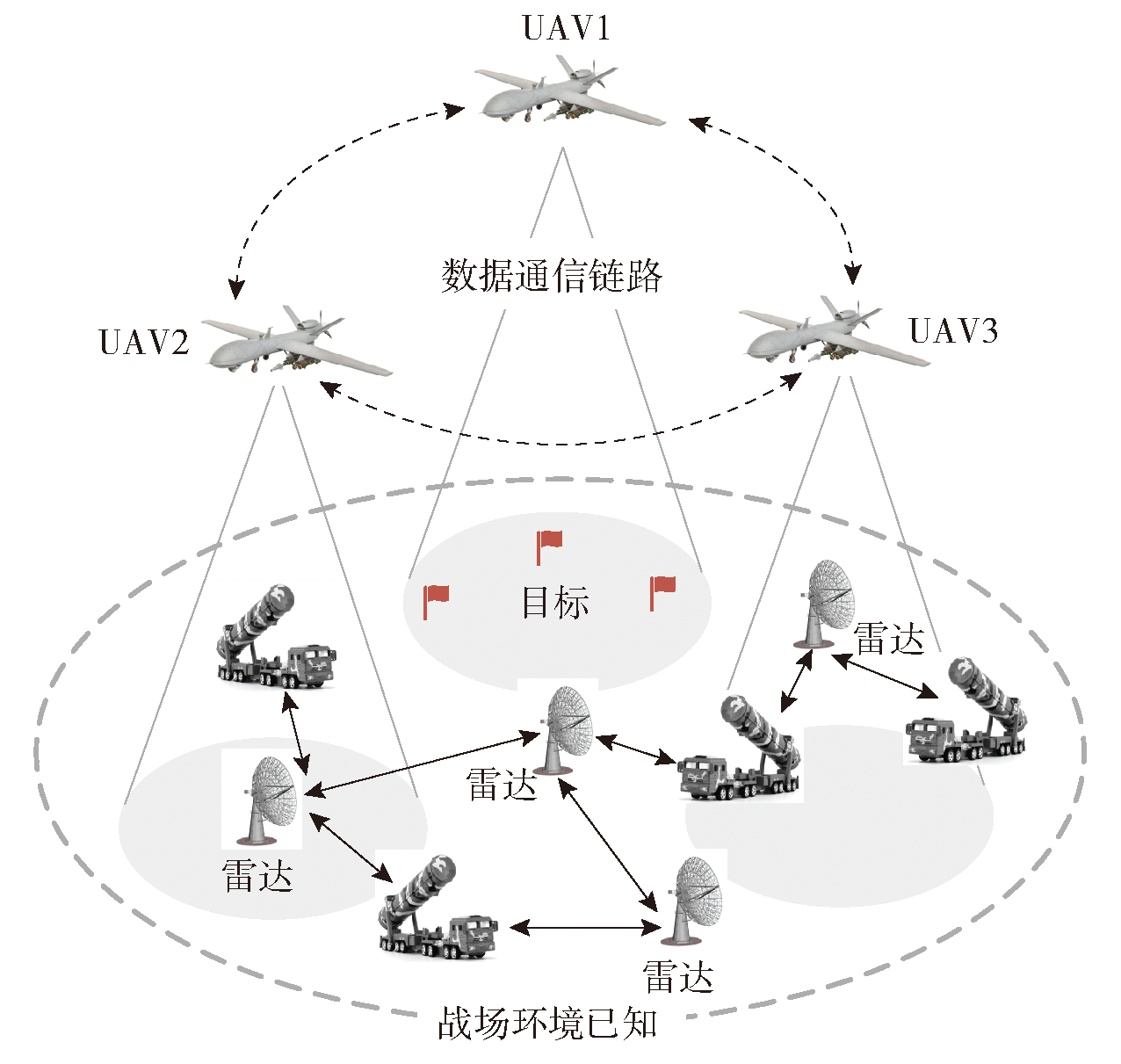
Fig.1 Multi-UAV collaborative trajectory planning scenario
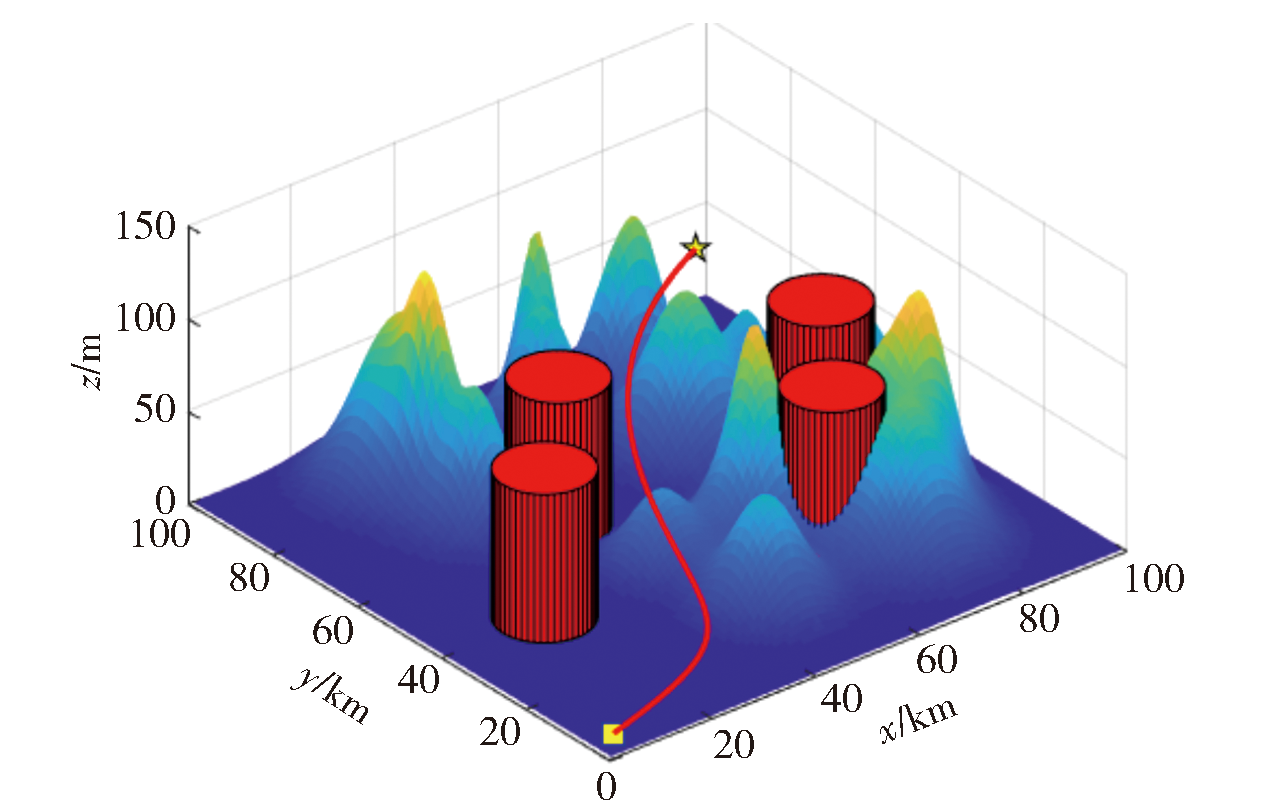
Fig.2 UAV trajectory model
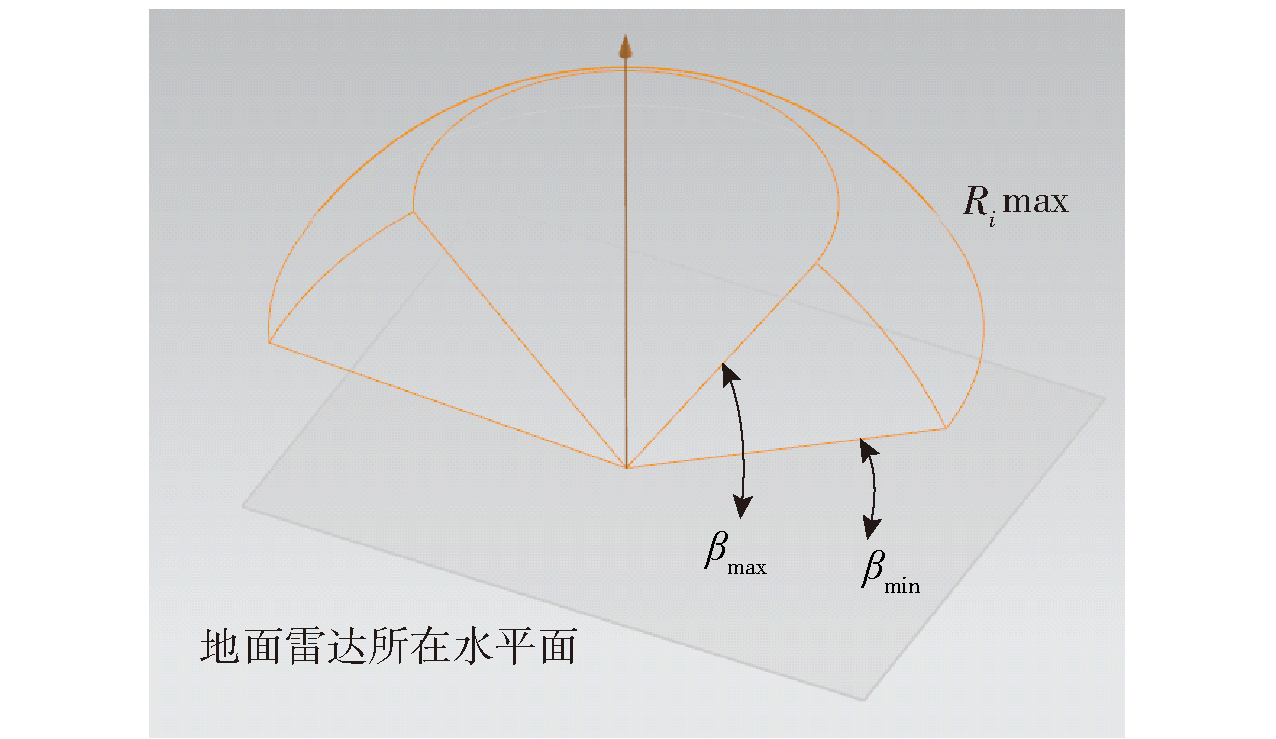
Fig.3 Ground radar detection model
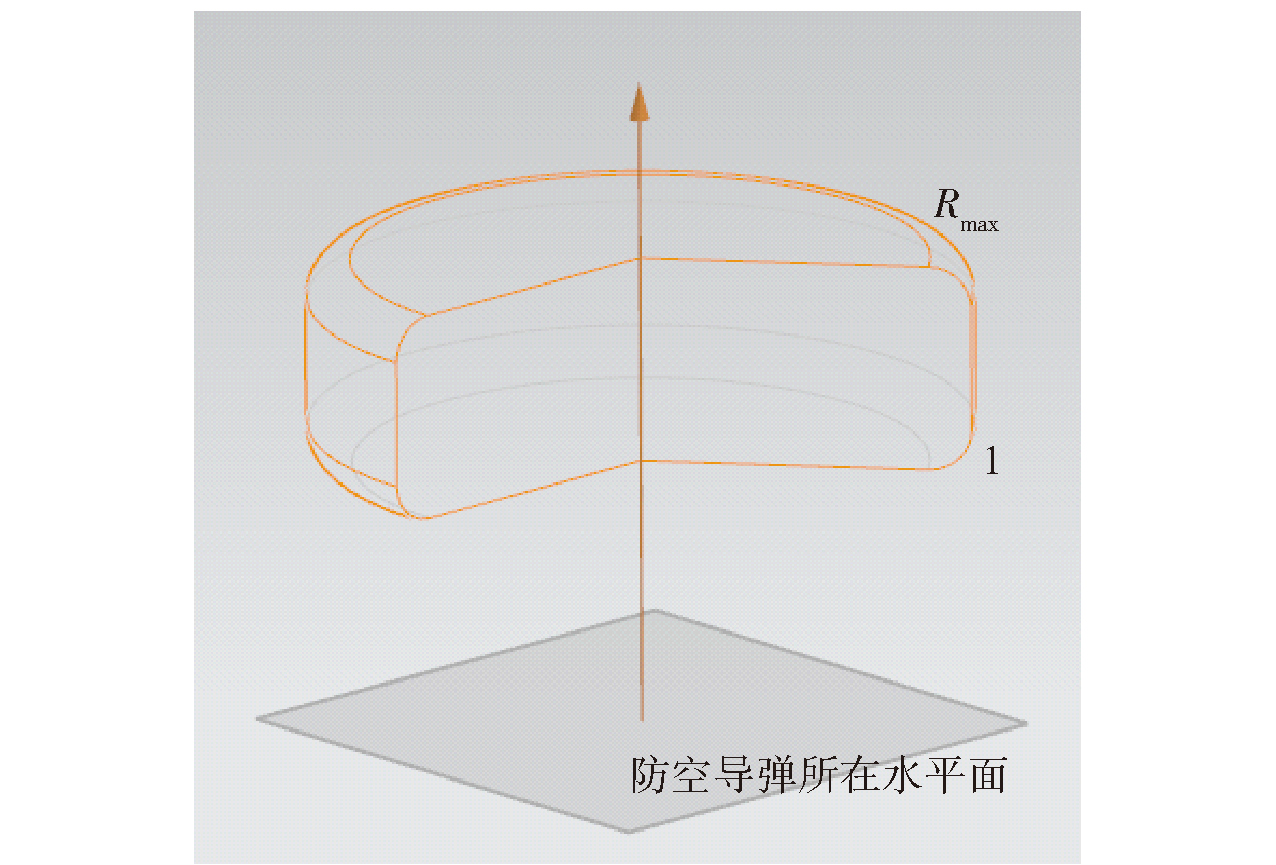
Fig.4 Air defence missile interception area model
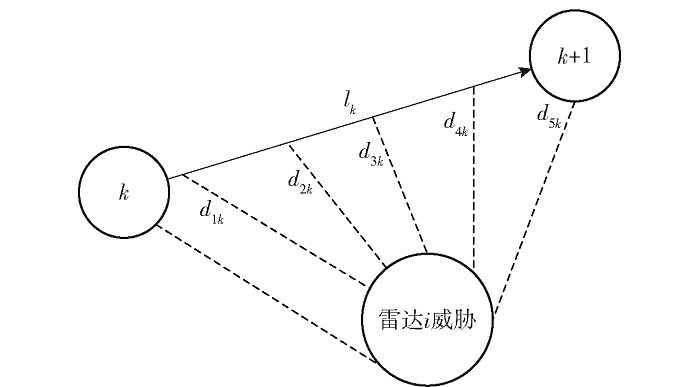
Fig.5 Radar threats
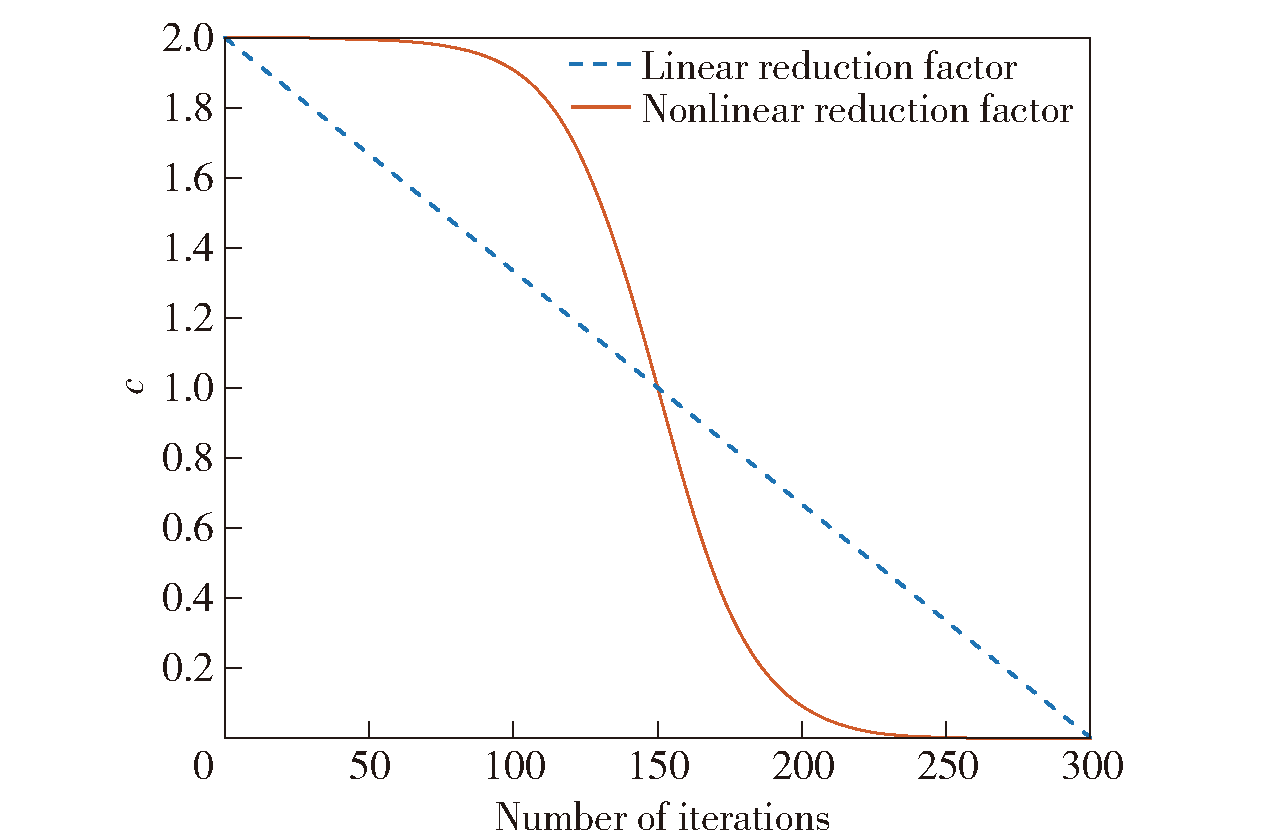
Fig.6 Variation of linear shrinkage factor c
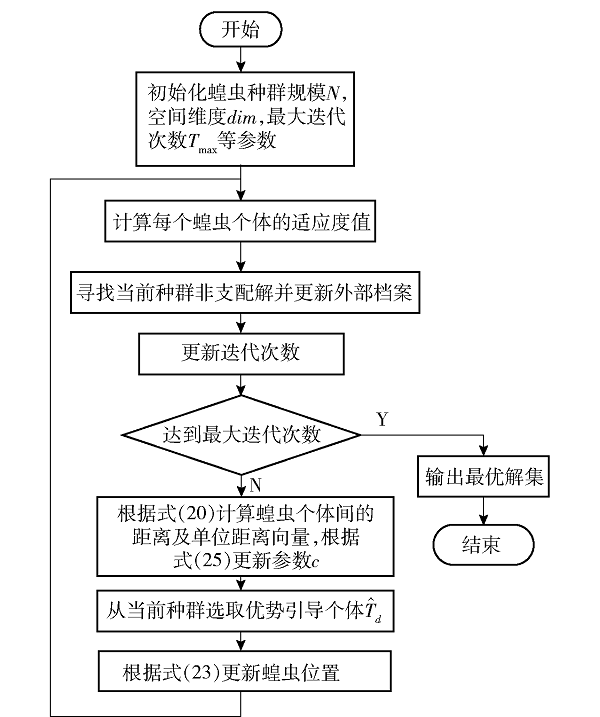
Fig.7 Flowchart of the improved grasshopper optimisation algorithm
| 雷达威胁坐标/km | 威胁半径/km |
|---|---|
| (20,60) | 5 |
| (50,30) | 3 |
| (30,70) | 5 |
| (80,80) | 10 |
| (20,80) | 5 |
| (80,30) | 5 |
| (60,70) | 5 |
| (80,50) | 6 |
Table 1 Ground-based radar information
| 雷达威胁坐标/km | 威胁半径/km |
|---|---|
| (20,60) | 5 |
| (50,30) | 3 |
| (30,70) | 5 |
| (80,80) | 10 |
| (20,80) | 5 |
| (80,30) | 5 |
| (60,70) | 5 |
| (80,50) | 6 |
| 防空导弹威胁坐标/km | 威胁半径/km |
|---|---|
| (10,60) | 8 |
| (40,50) | 6 |
| (60,50) | 5 |
| (100,30) | 8 |
Table 2 Anti-aircraft missile information
| 防空导弹威胁坐标/km | 威胁半径/km |
|---|---|
| (10,60) | 8 |
| (40,50) | 6 |
| (60,50) | 5 |
| (100,30) | 8 |

Fig.8 Stereo and top views of the improved grasshopperopti misation algorithm for trajectory planning
| 算法 | 航迹代价 | ||
|---|---|---|---|
| 平均航迹/km | 最佳航迹/km | 最差航迹/km | |
| GA | 75.7307 | 73.2124 | 78.2795 |
| PSO | 73.8909 | 72.3221 | 76.2391 |
| GOA | 73.6189 | 73.7284 | 75.2420 |
| 改进GOA | 73.0829 | 72.1689 | 75.6542 |
Table 3 Comparative data of trajectory costs for 4 algorithms
| 算法 | 航迹代价 | ||
|---|---|---|---|
| 平均航迹/km | 最佳航迹/km | 最差航迹/km | |
| GA | 75.7307 | 73.2124 | 78.2795 |
| PSO | 73.8909 | 72.3221 | 76.2391 |
| GOA | 73.6189 | 73.7284 | 75.2420 |
| 改进GOA | 73.0829 | 72.1689 | 75.6542 |
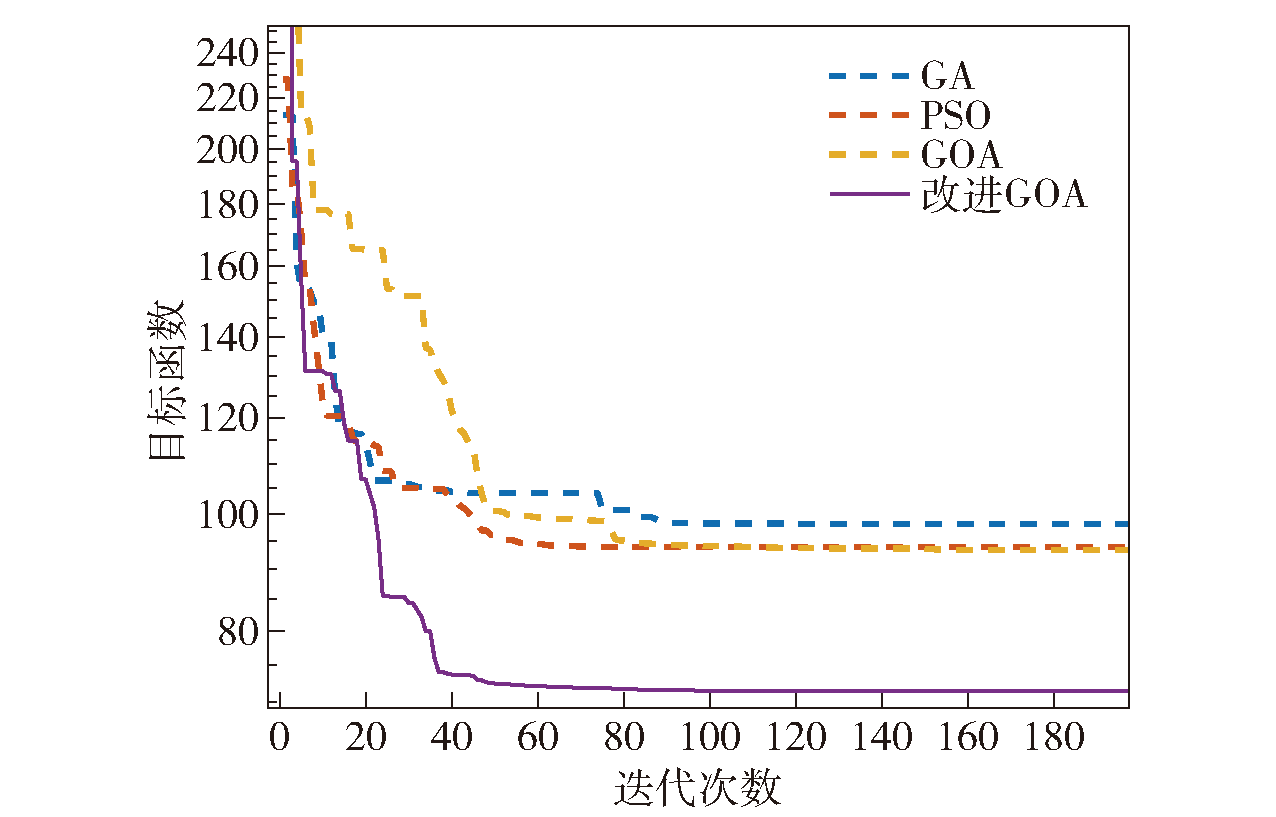
Fig.9 Variation of average trajectory integration cost during the iteration of 4 algorithms
| [1] |
宗群, 王丹丹, 邵士凯, 等. 多无人机协同编队飞行控制研究现状及发展[J]. 哈尔滨工业大学学报, 2017, 49(3):1-14.
|
|
|
|
| [2] |
张哲, 吴剑, 代冀阳, 等. 基于改进A*算法的多无人机协同战术规划[J]. 兵工学报, 2020, 41(12):2530-2539.
doi: 10.3969/j.issn.1000-1093.2020.12.019 |
|
|
|
| [3] |
任智, 张栋, 唐硕. 基于强化学习的改进三维A*算法在线航迹规划[J]. 系统工程与电子技术, 2023, 45(1):193-201.
doi: 10.12305/j.issn.1001-506X.2023.01.23 |
|
|
|
| [4] |
韩晓微, 韩震, 岳高峰, 等. 救灾无人机的优化A*航迹规划算法[J]. 计算机工程与应用, 2021, 57(6):232-238.
doi: 10.3778/j.issn.1002-8331.1912-0304 |
|
|
|
| [5] |
程凝怡, 刘志乾, 李昱奇. 一种基于Dijkstra的多约束条件下智能飞行器航迹规划算法[J]. 西北工业大学学报, 2020, 38(6):1284-1290.
|
|
doi: 10.1051/jnwpu/20203861284 URL |
|
| [6] |
郑弈, 谢亚琴. 基于Dijkstra算法改进的飞行器航迹快速规划算法[J]. 电子测量技术, 2022, 45(12):73-79.
|
|
|
|
| [7] |
傅嘉晨, 付润定, 张亚. 基于分布式遗传算法和改进人工势场法的导弹反探测航迹规划[J]. 东南大学学报(自然科学版), 2023, 53(4):709-717.
|
|
|
|
| [8] |
王庆禄, 吴冯国, 郑成辰, 等. 基于优化人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2023, 45(5):1461-1468.
doi: 10.12305/j.issn.1001-506X.2023.05.22 |
|
|
|
| [9] |
韩尧, 李少华. 基于改进人工势场法的无人机航迹规划[J]. 系统工程与电子技术, 2021, 43(11):3305-3311.
doi: 10.12305/j.issn.1001-506X.2021.11.31 |
|
|
|
| [10] |
张丹萌, 甄子洋, 陈棪. 基于改进RRT-Connect的协同航迹规划[J]. 电光与控制, 2021, 28(9):25-29.
|
|
|
|
| [11] |
张康, 陈建平. 复杂环境下基于采样空间自调整的航迹规划算法[J]. 计算机应用, 2021, 41(4):1207-1213.
doi: 10.11772/j.issn.1001-9081.2020060863 |
|
doi: 10.11772/j.issn.1001-9081.2020060863 |
|
| [12] |
傅阳光, 周成平, 丁明跃. 基于混合量子粒子群优化算法的三维航迹规划[J]. 宇航学报, 2010, 31(12):2657-2664.
|
|
|
|
| [13] |
方群, 徐青. 基于改进粒子群算法的无人机三维航迹规划[J]. 西北工业大学学报, 2017, 35(1):66-73.
|
|
|
|
| [14] |
徐瑞莲, 周新志, 宁芊. 基于改进差分进化算法的多无人机航迹规划[J]. 火力与指挥控制, 2020, 45(1):169-173,179.
|
|
|
|
| [15] |
吴文海, 郭晓峰, 周思羽. 基于改进约束差分进化算法的动态航迹规划[J]. 控制与决策, 2020, 35(10):2381-2390.
|
|
|
|
| [16] |
马军. 基于改进人工蜂群算法的多无人机航迹规划技术研究[D]. 南京: 南京航空航天大学, 2021.
|
|
|
|
| [17] |
伍鹏飞, 李涛, 曹广旭, 等. 基于改进混沌蜂群算法的无人战斗机路径规划[J]. 中国科技论文, 2021, 16(3):301-306.
|
|
|
|
| [18] |
李文广, 胡永江, 庞强伟, 等. 基于改进遗传算法的多无人机协同侦察航迹规划[J]. 中国惯性技术学报, 2020, 28(2):248-255.
|
|
|
|
| [19] |
程泽新, 李东生, 高杨. 一种改进遗传算法的无人机航迹规划[J]. 计算机仿真, 2019, 36(12):31-35.
|
|
|
|
| [20] |
柳长安, 王晓鹏, 刘春阳, 等. 基于改进灰狼优化算法的无人机三维航迹规划[J]. 华中科技大学学报(自然科学版), 2017, 45(10):38-42.
|
|
|
|
| [21] |
曹建秋, 张广言, 徐鹏. A*初始化的变异灰狼优化的无人机路径规划[J]. 计算机工程与应用, 2022, 58(4):275-282.
doi: 10.3778/j.issn.1002-8331.2008-0426 |
|
|
|
| [22] |
尹依伊, 王晓芳, 周健. 基于Q学习的多无人机协同航迹规划方法[J]. 兵工学报, 2023, 44(2):484-495.
doi: 10.12382/bgxb.2021.0606 |
|
|
|
| [23] |
唐嘉宁, 杨昕, 周思达, 等. 未知环境下改进DDQN的无人机探索航迹规划研究[J]. 电光与控制, 2023, 30(4):23-27,33.
|
|
|
|
| [24] |
高敬鹏, 胡欣瑜, 江志烨. 改进DDPG无人机航迹规划算法[J]. 计算机工程与应用, 2022, 58(8):264-272.
doi: 10.3778/j.issn.1002-8331.2106-0054 |
|
|
|
| [25] |
丁强. 多无人机协同的飞行航迹规划问题研究[D]. 杭州: 浙江大学, 2018.
|
|
|
|
| [26] |
池海红, 周明鑫. 融合强化学习和进化算法的高超声速飞行器航迹规划[J]. 控制理论与应用, 2022, 39(5):847-856.
|
|
|
|
| [27] |
doi: 10.1016/j.advengsoft.2017.01.004 URL |
| [28] |
刘琨. 多无人机协同侦察航迹规划算法研究[D]. 南京: 南京航空航天大学, 2021.
|
|
|
|
| [29] |
doi: 10.1016/j.eswa.2019.04.043 URL |
| [30] |
|
| [31] |
罗学义. 基于智能Petri网的物流配送路径优化算法[J]. 计算机工程与设计, 2011, 32(7):2381-2384.
|
|
|
| [1] | WANG Yuchen, WANG Wei, LI Ning, ZHU Zejun, SHI Zhongjiao. A Control Method for Roll Stabilization of Guided Missile with Large Angle of Attack [J]. Acta Armamentarii, 2024, 45(3): 774-788. |
| [2] | PEI Xinyue, YU Yong, LI Zheng, LI Jiaxun, YU Jianqiao. Based on neural network, direct force/aerodynamics composite control missile turns quickly [J]. Acta Armamentarii, 0, (): 0-0. |
| [3] | YU Zhilong, LI Yinghui, PEI Binbin, XU Wenfeng, DUAN Xiaocong, SONG Kexin. Robust Adaptive Fault-tolerant Attitude Control of Flying-wing UAVs with Flight Envelope Constraints [J]. Acta Armamentarii, 2024, 45(1): 231-240. |
| [4] | LI Jiashen, WANG Xiaofang, LIN Hai. Intelligent Penetration Policy for Hypersonic Cruise Missiles Based on Virtual Targets [J]. Acta Armamentarii, 0, (): 0-0. |
| [5] | WANG Wei, YANG Jing, NAN Yuxiang, LI Junhui, WANG Yuchen, . Design of a Neural Network Acceleration Autopilot for Spinning Projectiles Based on Adaptive Disturbance Observer [J]. Acta Armamentarii, 0, (): 0-0. |
| [6] | DENG Tingxiang, REN Peng, CHENG Jia, WANG Jianbing, LIANG Zhenjie, XIANG Zheng. Relative Positioning Technology for Two Points Based on Cluster Cooperative Orientation [J]. Acta Armamentarii, 2023, 44(S2): 22-34. |
| [7] | CAO Zhengyang, ZHANG Bing, BAI Yixuan, GOU Kenan. Multi-UAV Cooperative Navigation Method Based on Fusion of GNSS/INS/VNS Positioning Information [J]. Acta Armamentarii, 2023, 44(S2): 157-166. |
| [8] | HU Yanyang, HE Fan, BAI Chengchao. Cooperative Obstacle Avoidance Decision Method for the Terminal Guidance Phase of Hypersonic Vehicles [J]. Acta Armamentarii, 0, (): 0-0. |
| [9] | CAO Haozhe, LIU Quanpan. Unmanned Swarm Collaborative Visual SLAM Algorithm Based on Semi-direct Method [J]. Acta Armamentarii, 2023, 44(11): 3345-3358. |
| [10] | BI Wenhao, WANG Zhaoxi, WU Wei, ZHANG An. Autonomous Collaboration Mechanism of UAV Cluster Based on Public Goods Game [J]. Acta Armamentarii, 2023, 44(11): 3407-3421. |
| [11] | WANG Kang, SI Peng, CHEN Li, LI Zhongxin, WU Zhilin. 3D Path Planning of Unmanned Aerial Vehicle Based on Enhanced Sand Cat Swarm Optimization Algorithm [J]. Acta Armamentarii, 2023, 44(11): 3382-3393. |
| [12] | FU Jinbo, ZHANG Dong, WANG Mengyang, ZHAO Junmin. Unmanned Aerial Vehicle Path Planning for Improved Target Positioning Accuracy [J]. Acta Armamentarii, 2023, 44(11): 3394-3406. |
| [13] | PAN Zishuang, SU Xichao, HAN Wei, LIU Wenlin, YU Dazhao, WANG Jie. Cooperative Combat Coalition Formation with Heterogeneous UAV Swarm Based on Dynamic Consensus-based Grouping Algorithm [J]. Acta Armamentarii, 0, (): 0-0. |
| [14] | WANG Yuchen, WANG Wei, LIN Shiyao, YANG Jing, WANG Shaolong, YIN Zhao. Three-dimensional Adaptive Sliding Mode Cooperative Guidance Law with Impact Time and Angle Constraints [J]. Acta Armamentarii, 2023, 44(9): 2778-2790. |
| [15] | WANG Mengyang, ZHANG Dong, TANG Shuo, XU Bin, ZHAO Junmin. UAV Swarm On-line Mission Planning Method Based on Dynamic Allocation Strategy [J]. Acta Armamentarii, 2023, 44(8): 2207-2223. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||