
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 22-34.doi: 10.12382/bgxb.2023.0829
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
DENG Tingxiang1, REN Peng1,*( ), CHENG Jia1, WANG Jianbing2,3, LIANG Zhenjie2,3, XIANG Zheng1
), CHENG Jia1, WANG Jianbing2,3, LIANG Zhenjie2,3, XIANG Zheng1
Received:2023-08-31
Online:2024-01-10
Contact:
REN Peng
CLC Number:
DENG Tingxiang, REN Peng, CHENG Jia, WANG Jianbing, LIANG Zhenjie, XIANG Zheng. Relative Positioning Technology for Two Points Based on Cluster Cooperative Orientation[J]. Acta Armamentarii, 2023, 44(S2): 22-34.
Add to citation manager EndNote|Ris|BibTeX
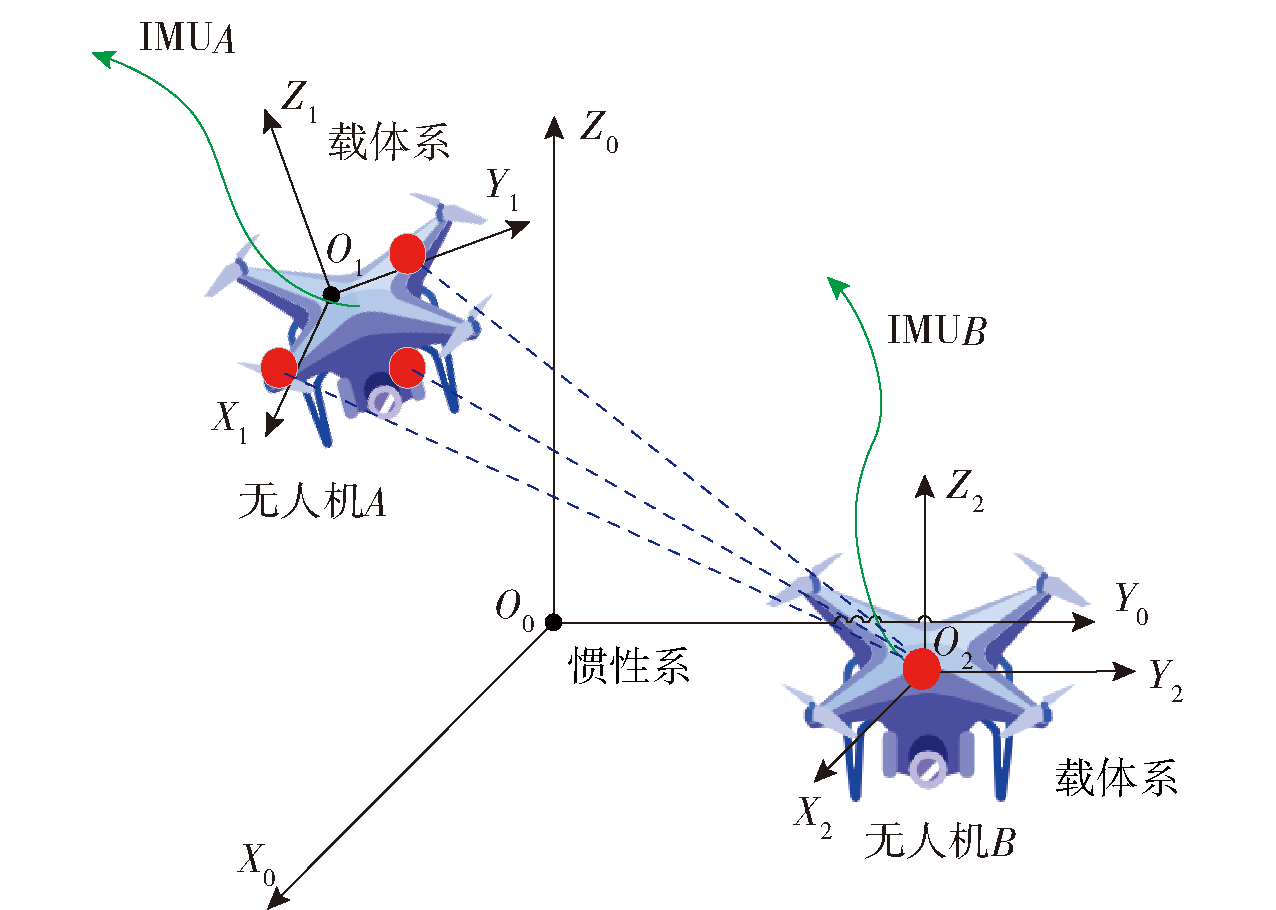
Fig.1 UAV relative positioning system
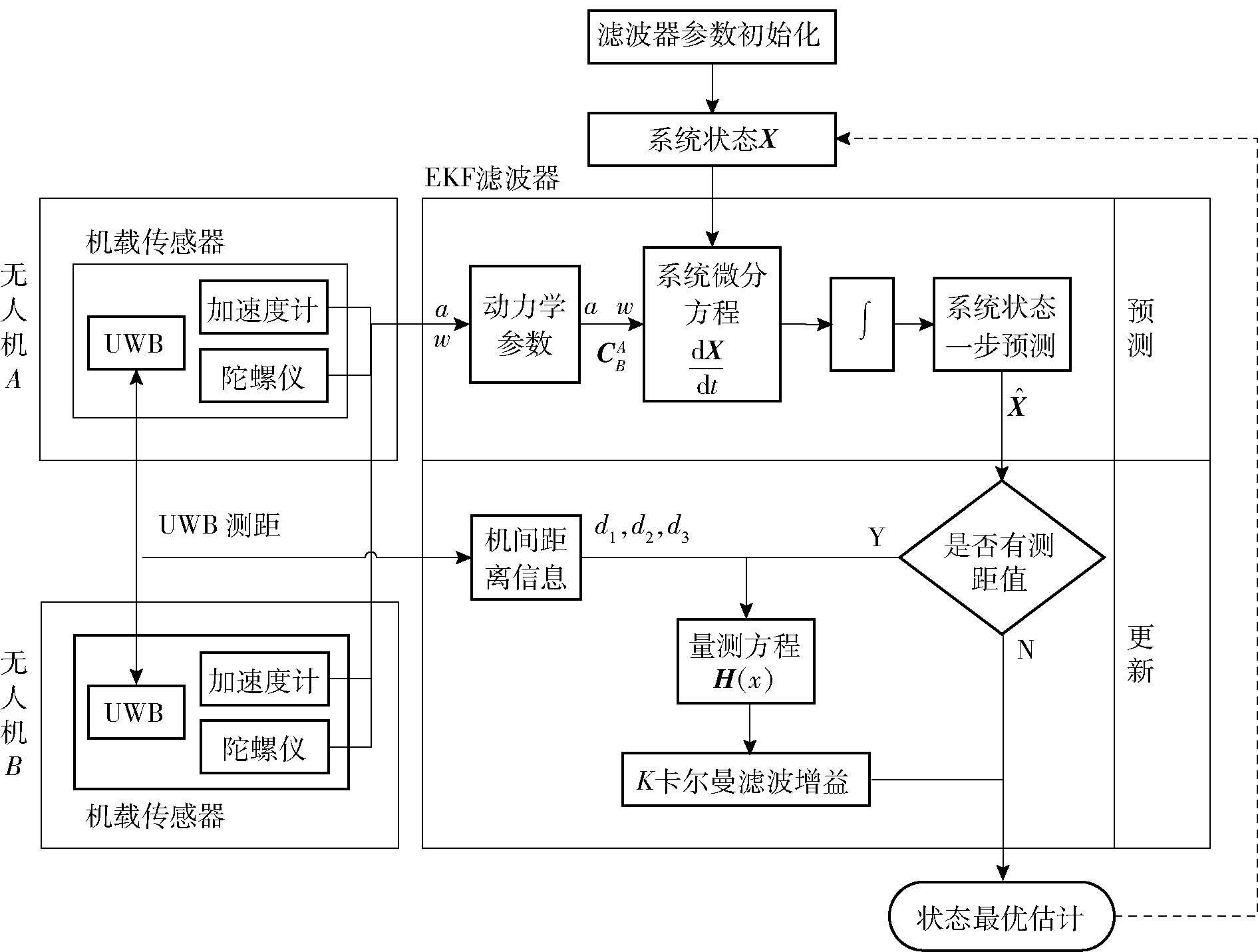
Fig.2 Working process of the whole system
| 参数 | 数值 |
|---|---|
| IMU采样率/s | 0.005 |
| 陀螺仪常值漂/(deg·h-1) | 0.1 |
| 加速度计常值漂移/ug | 100 |
| 测距误差/m | 0.5 |
| 初始位置误差/m | (2,2,2) |
| 初始速度误差/(m·s-1) | (0.1,0.1,0.1) |
| UWB位置(x,y,z)/m | UWB1(0.4,0,0) UWB2(-0.3,0,0) UWB3(0,0.3,0.4) |
| 状态噪声矩阵 | diag(10-5×I3×1;10-2×I3×1; 10-8×I6×1) |
Table 1 Simulation experiment parameters
| 参数 | 数值 |
|---|---|
| IMU采样率/s | 0.005 |
| 陀螺仪常值漂/(deg·h-1) | 0.1 |
| 加速度计常值漂移/ug | 100 |
| 测距误差/m | 0.5 |
| 初始位置误差/m | (2,2,2) |
| 初始速度误差/(m·s-1) | (0.1,0.1,0.1) |
| UWB位置(x,y,z)/m | UWB1(0.4,0,0) UWB2(-0.3,0,0) UWB3(0,0.3,0.4) |
| 状态噪声矩阵 | diag(10-5×I3×1;10-2×I3×1; 10-8×I6×1) |
| 运动参数 | 数值 |
|---|---|
| 飞行时长/s | 600 |
| 初始相对位置/m | 18 |
| 初始速度/(m·s-1) | 0 |
Table 2 Motion parameter setting
| 运动参数 | 数值 |
|---|---|
| 飞行时长/s | 600 |
| 初始相对位置/m | 18 |
| 初始速度/(m·s-1) | 0 |
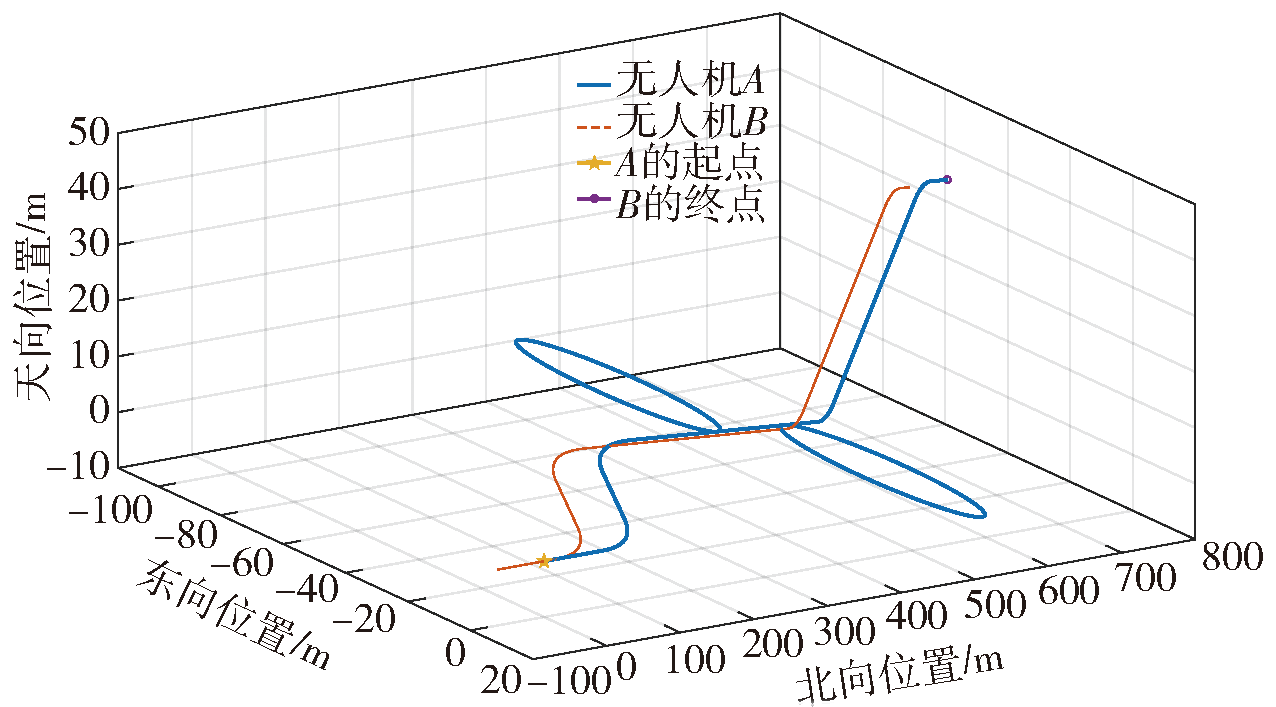
Fig.3 Relative motion trajectory of UAV
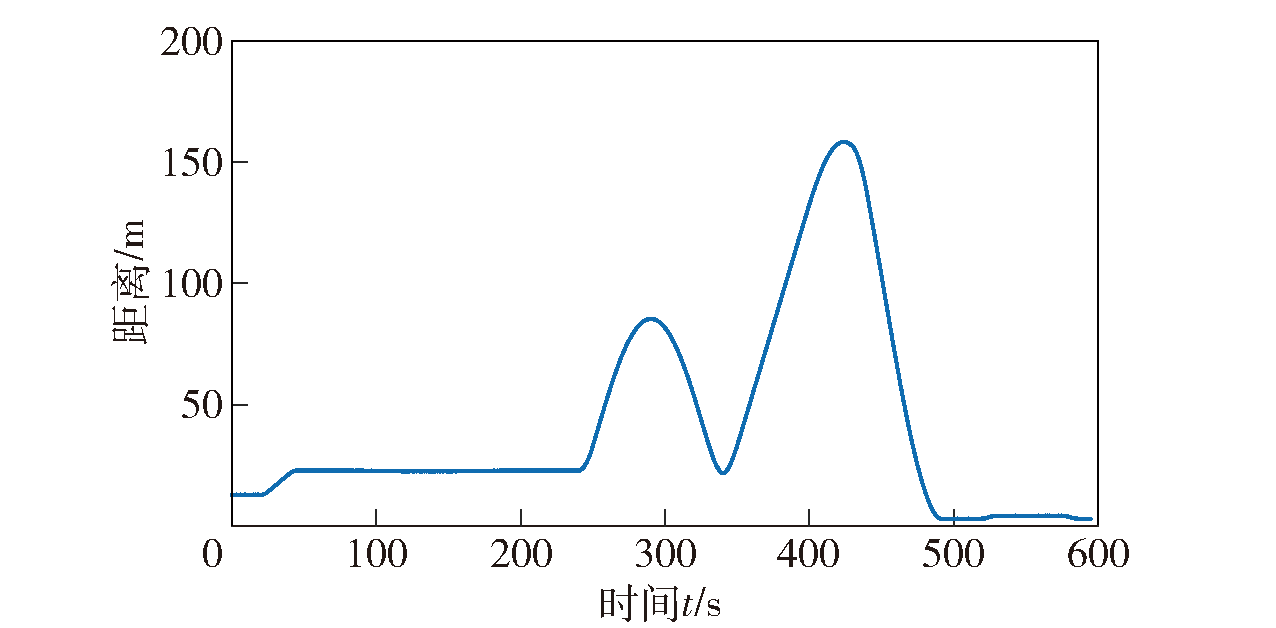
Fig.4 Distance between UAVs
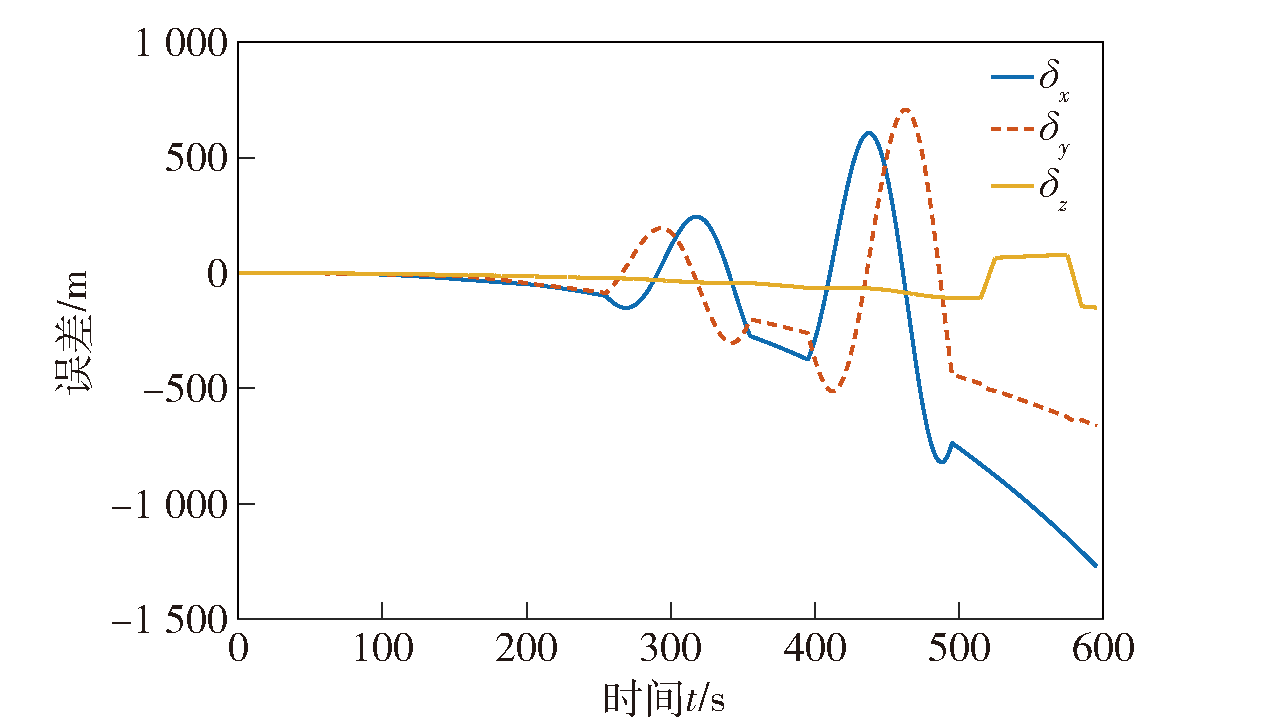
Fig.5 Relative position error of inertial navigation
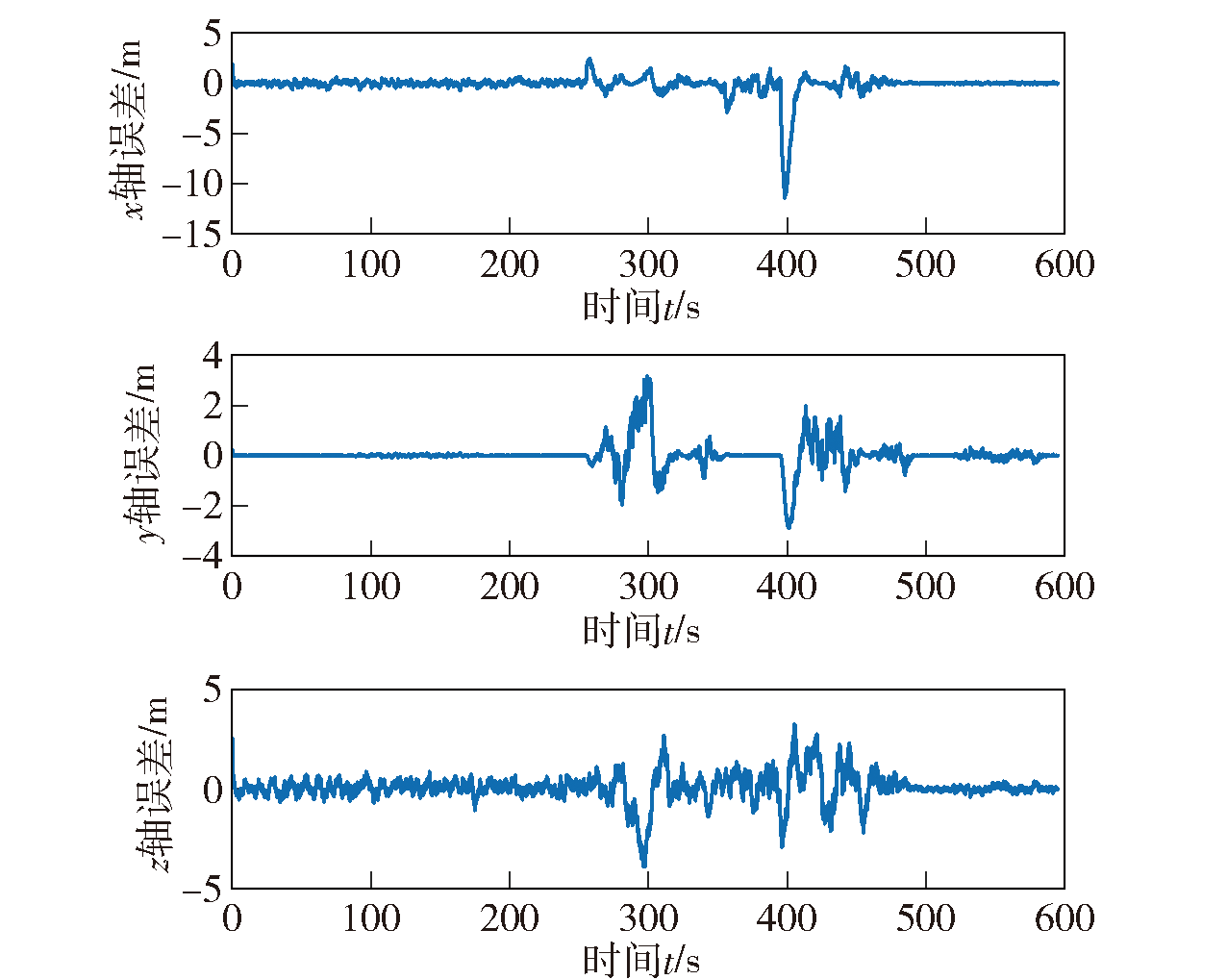
Fig.6 Simulation of relative positioning algorithm
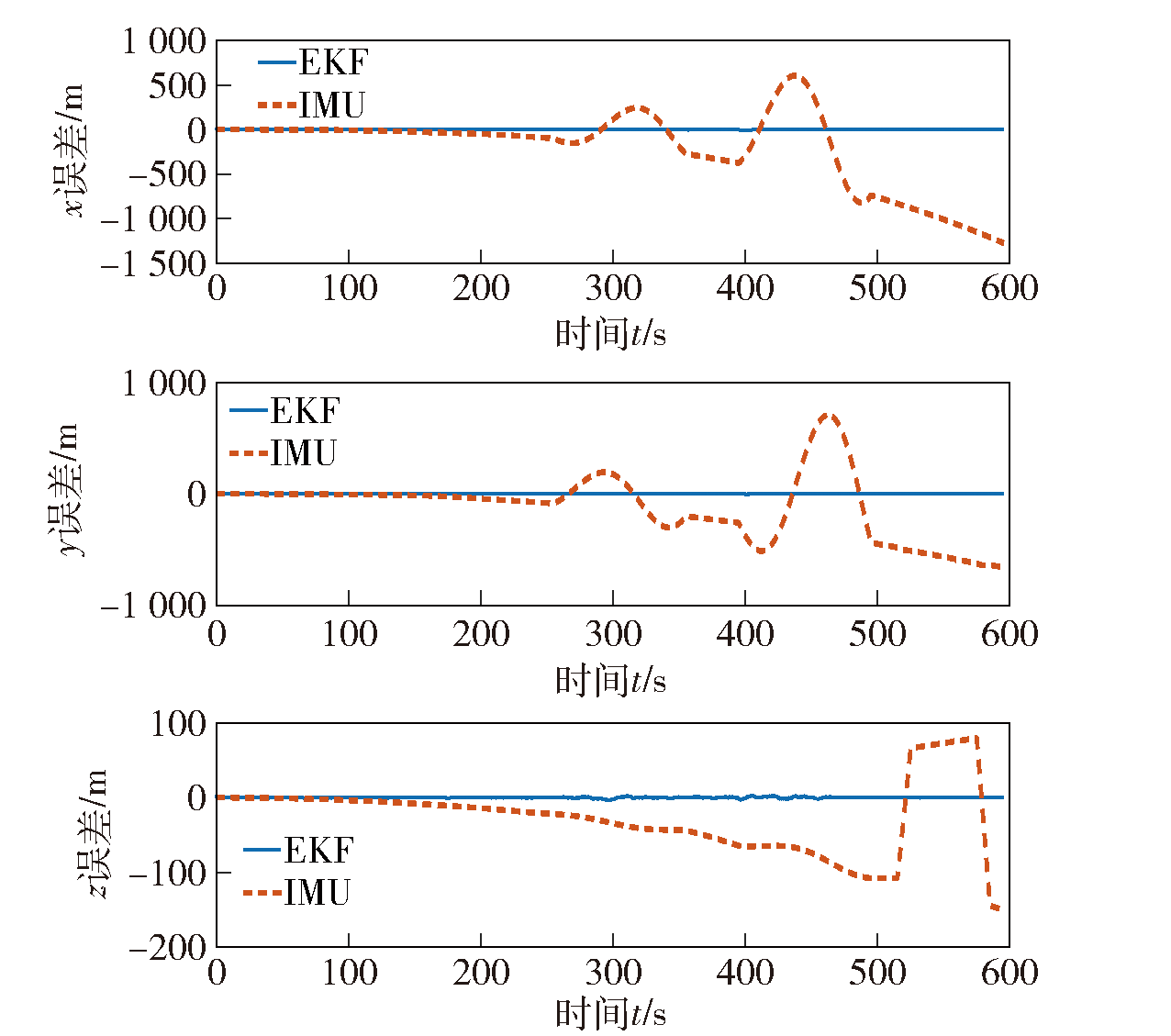
Fig.7 Comparison of relative positioning algorithm and inertial navigation
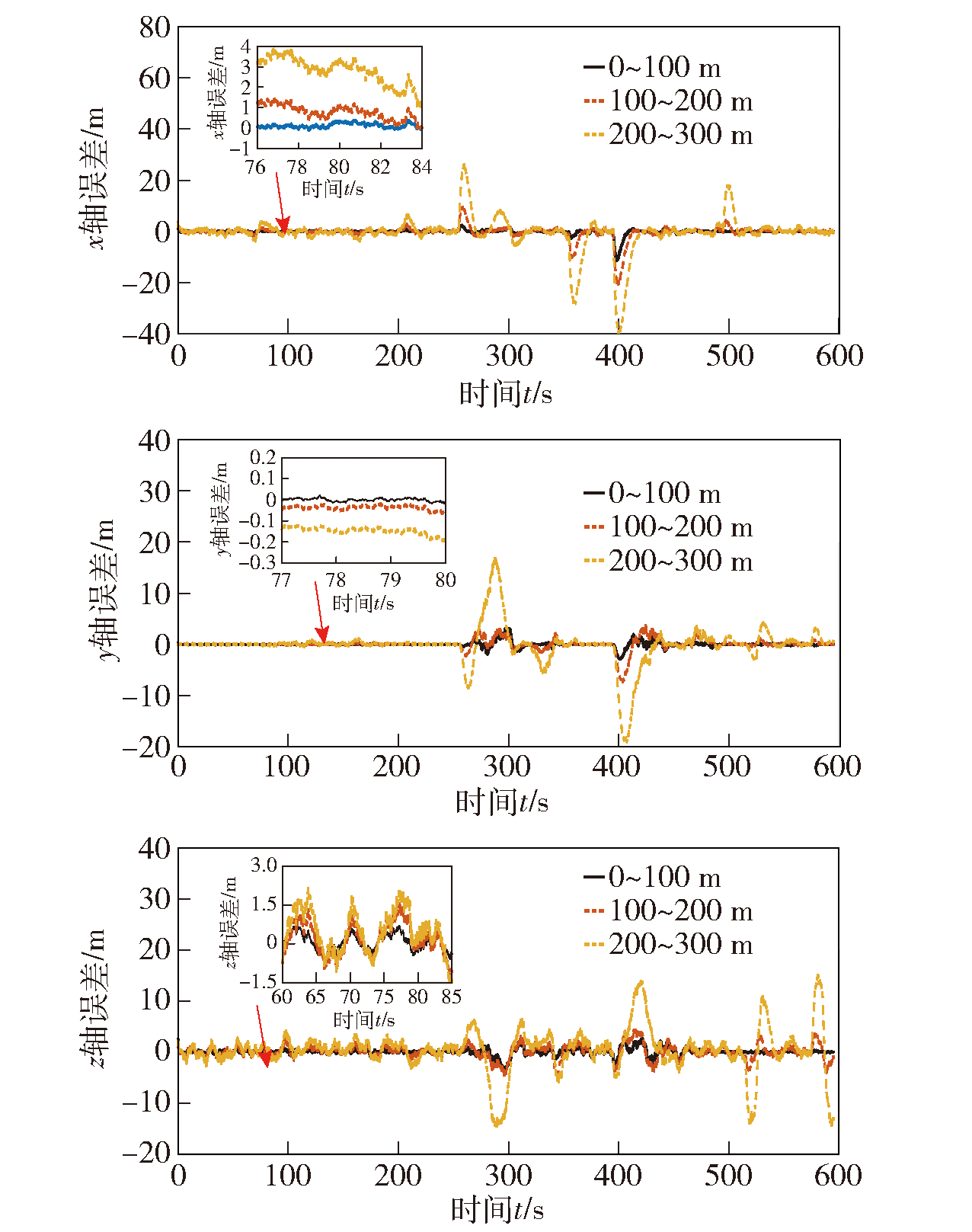
Fig.8 The effect of distance on relative positioning performance
| UWB传感器编号 | 位置(x,y,z)/m |
|---|---|
| UWB1 | (0.4,0,0) |
| UWB2 | (-0.3,0,0) |
| UWB3 | (0,0.3,0.4) |
| UWB4 | (0,-0.5,0) |
| UWB5 | (0,0,-0.5) |
Table 3 UWB sensor settings
| UWB传感器编号 | 位置(x,y,z)/m |
|---|---|
| UWB1 | (0.4,0,0) |
| UWB2 | (-0.3,0,0) |
| UWB3 | (0,0.3,0.4) |
| UWB4 | (0,-0.5,0) |
| UWB5 | (0,0,-0.5) |
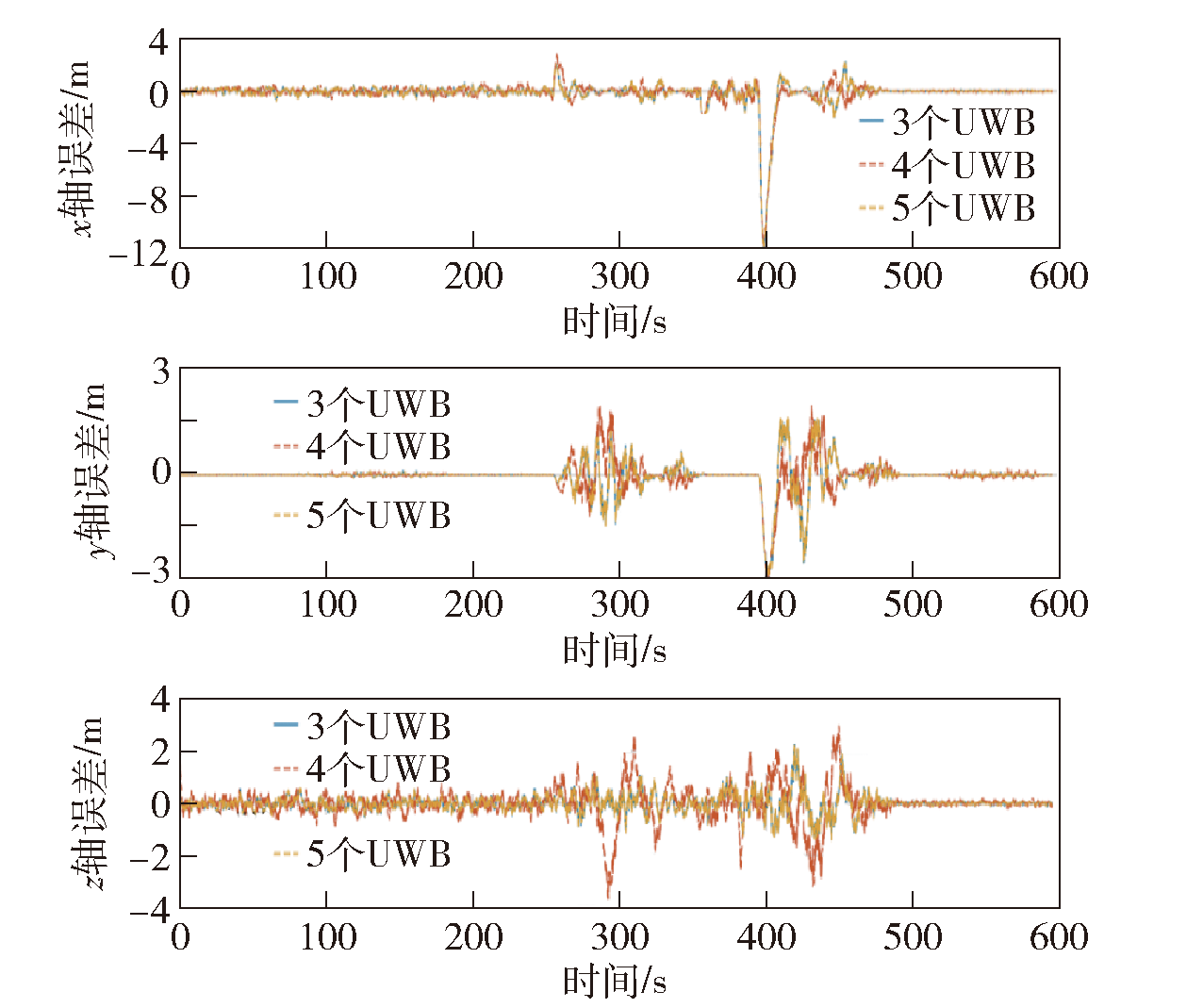
Fig.9 Relative positioning results of different number of UWB sensors
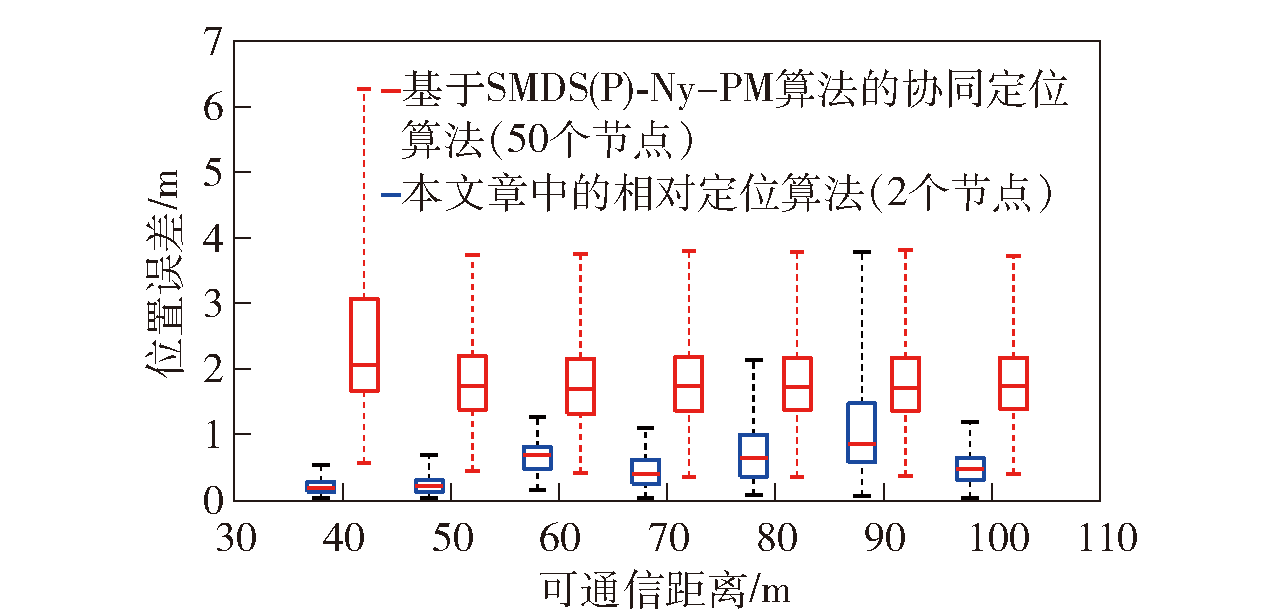
Fig.10 Comparison of positioning errors of two algorithms
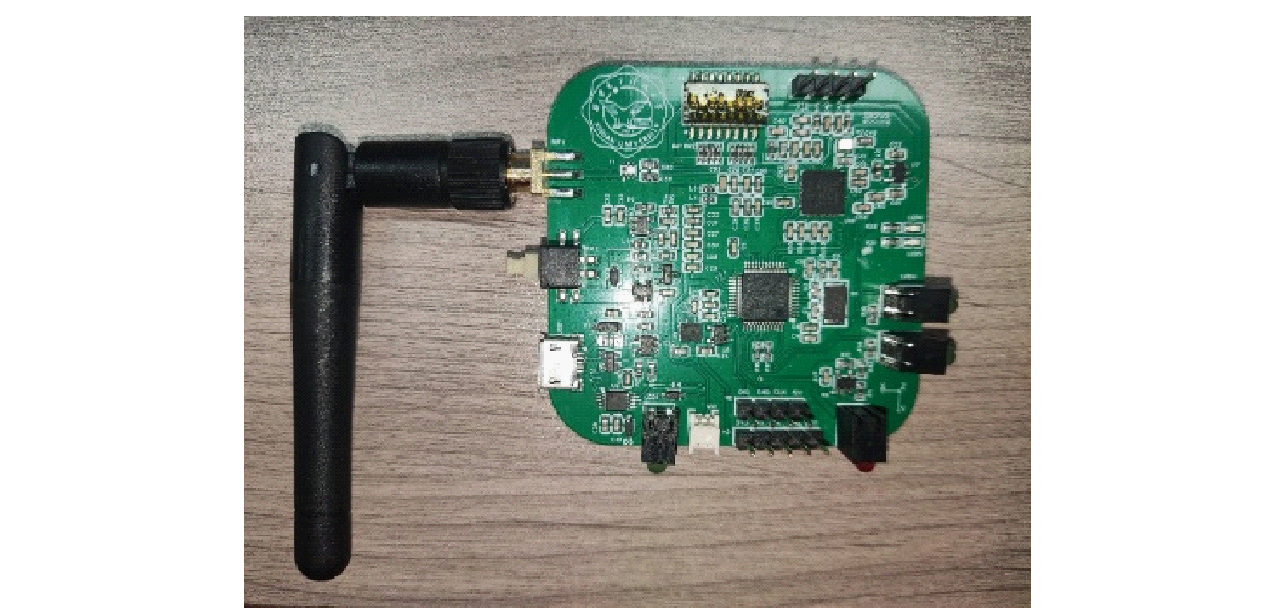
Fig.11 Sample prototype

Fig.12 Deployment of system prototypes
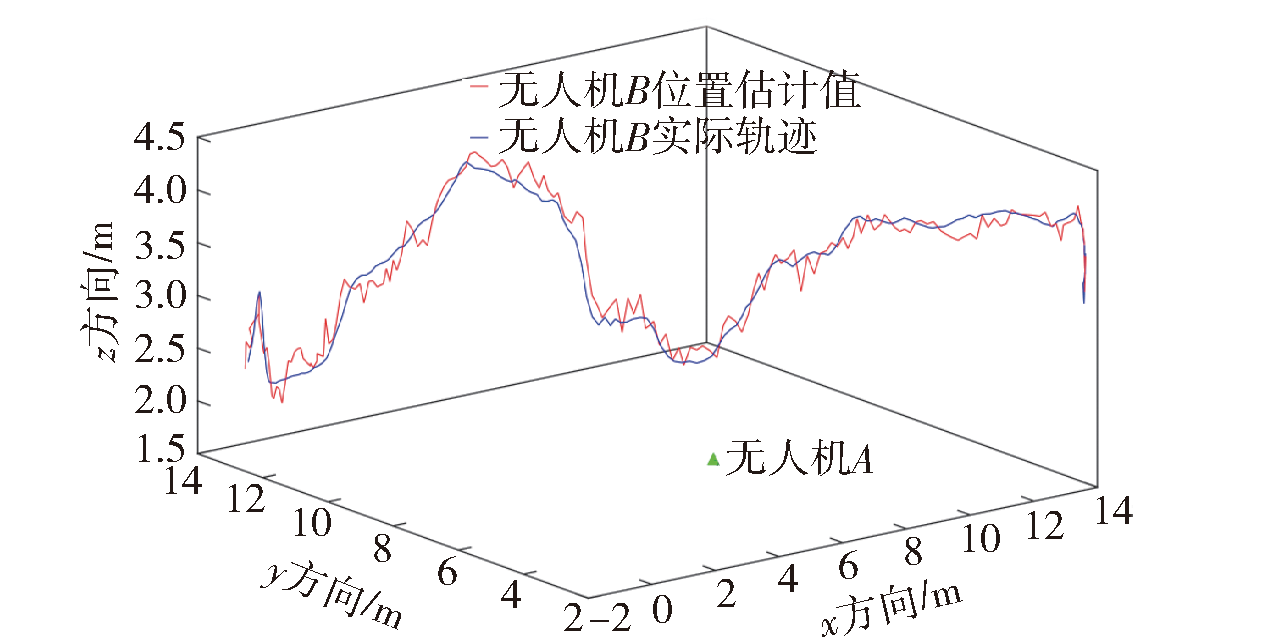
Fig.13 UAV position value obtained from the test
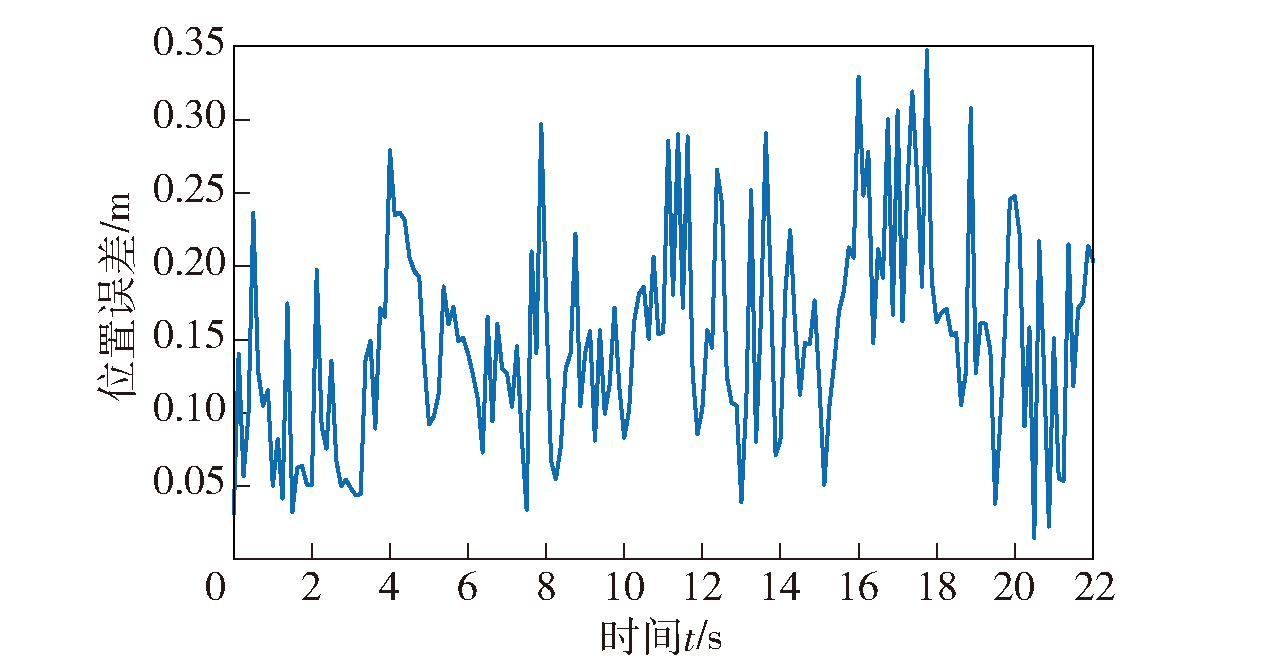
Fig.14 Position error of UAV
| [1] |
陈炜军, 邹庆, 涂卫军. 空面武器智能化发展趋势与应用[J]. 直升机技术, 2021(e2): 69-72.
|
|
|
|
| [2] |
郝菁. 基于惯导/数据链协同的无人机集群导航定位算法研究[D]. 北京: 中国电子科技集团公司电子科学研究院, 2019.
|
|
|
|
| [3] |
裴凌, 李涛, 花彤, 等. 多源融合定位算法综述[J]. 南京信息工程大学学报(自然科学版), 2022, 14(6): 635-648.
|
|
|
|
| [4] |
doi: 10.1016/j.inffus.2023.01.025 URL |
| [5] |
韩煜, 宋韬, 郑多, 等. 基于冲突触发避碰机制的无人飞行器集群协同制导技术[J]. 兵工学报, 2023, 44(7): 1881-1895.
doi: 10.12382/bgxb.2022.0152 |
|
doi: 10.12382/bgxb.2022.0152 |
|
| [6] |
doi: 10.1109/Access.6287639 URL |
| [7] |
doi: 10.1109/ACCESS.2021.3071921 URL |
| [8] |
doi: 10.3390/s22010210 URL |
| [9] |
|
| [10] |
doi: 10.1109/ACCESS.2019.2902127 URL |
| [11] |
doi: 10.3390/s23135918 URL |
| [12] |
doi: 10.1063/1.5117341 URL |
| [13] |
夏楠, 邱天爽, 李景春, 等. 一种卡尔曼滤波与粒子滤波相结合的非线性滤波算法[J]. 电子学报, 2013, 41(1): 148-152.
doi: 10.3969/j.issn.0372-2112.2013.01.026 |
|
doi: 10.3969/j.issn.0372-2112.2013.01.026 |
|
| [14] |
刘燕, 张健, 肖庆高, 等. UKF与EKF在导航定位中的对比研究[J]. 微处理机, 2023, 44(4): 30-33.
|
|
|
|
| [15] |
刘向阳. 几种典型非线性滤波算法及性能分析[J]. 舰船电子工程, 2019, 39(7): 32-36.
|
|
|
|
| [16] |
doi: 10.1007/s10586-018-1803-1 |
| [17] |
高嵩, 宋佳鹏, 房穹, 等. 抗差自适应容积卡尔曼滤波在UWB室内定位中的应用[J]. 导航定位学报, 2023, 11(1): 142-147.
|
|
|
|
| [18] |
徐阳扬, 陈明, 赵艳, 等. 基于粒子滤波的室内机器人定位加速收敛算法[J]. 电子设计工程, 2023, 31(14): 6-11.
|
|
|
|
| [19] |
苏佳, 杨泽超, 易卿武, 等. 基于遗传算法优化BP神经网络的GNSS干扰源定位技术[J/OL]. 无线电工程, 2023(2023-08-29)[2023-12-06]. http://kns.cnki.net/kcms/detail/13.1097.TN.20230829.1520.006.html.
|
|
|
|
| [20] |
|
| [21] |
鱼瑜, 吴明亮, 张来喜, 等. 多传感器融合定位方法探讨[J]. 导航定位学报, 2023, 11(5): 151-163.
|
|
|
|
| [22] |
冯硕. 基于UWB与深度学习融合的单基站定位算法[D]. 海口: 海南大学, 2022.
|
|
|
|
| [23] |
李玉柏, 孙迅. 基于迁移学习提高WiFi室内定位中信道状态信息指纹库的鲁棒性[J]. 电子与信息学报, 2023, 45(10): 3657-3666.
|
|
|
|
| [24] |
|
| [25] |
吴杰宏, 李丹阳. 无人机集群编队控制方法研究综述[J]. 无线电通信技术, 2023, 49(4): 589-596.
|
|
|
|
| [26] |
武成锋, 程进, 郭晓云, 等. 飞行器集群协同定位与导航对抗技术发展与展望[J]. 宇航学报, 2022, 43(2): 131-142.
|
|
|
|
| [27] |
doi: 10.1109/JSEN.2023.3252019 URL |
| [28] |
doi: 10.3390/rs13244987 URL |
| [29] |
朱徐东, 赖际舟, 周本川, 等. 基于构型寻优的多无人机鲁棒自适应协同定位方法[J]. 中国惯性技术学报, 2023, 31(7): 650-658,64.
|
|
|
|
| [30] |
朱奎宝, 温紫晴, 狄世彦, 等. 多机器人系统的可观测性及协同定位精度分析[J/OL]. 电讯技术, 2023(2023-06-05)[2023-12-06].https://doi.org/10.20079/j.issn.1001-893x.230417003.
|
|
|
|
| [31] |
刘杨. 多AUV协同导航优化算法与编队构型设计[D]. 哈尔滨: 哈尔滨工程大学, 2015.
|
|
|
|
| [32] |
|
| [33] |
王小刚, 郭继峰, 崔乃刚. 基于数据链的智能导弹协同定位方法[J]. 中国惯性技术学报, 2009, 17(3):319-323.
|
|
|
|
| [34] |
|
| [35] |
闵海根, 李尧, 汪建球, 等. 考虑通信时延的智能网联汽车协同定位方法[J]. 中国公路学报, 2023, 36(6): 220-234.
doi: 10.19721/j.cnki.1001-7372.2023.06.019 |
|
|
|
| [36] |
张红娟, 钱闯, 招倩莹, 等. 顾及通信延迟的车路协同高精度定位[J/OL]. 测绘学报, 2023(2023-06-08)[2023-12-06]. http://kns.cnki.net/kcms/detail/11.2089.P.20230608.0903.002.html.
|
|
|
|
| [37] |
卢健, 陈旭, 罗毛欣, 等. 考虑通信延迟的多自治水下航行器协同定位算法[J]. 控制理论与应用, 2020, 37(9): 2061-2072.
|
|
|
|
| [38] |
刘天豪. 空中自组织网络优化分簇相对定位算法研究[D]. 北京: 中国电子科技集团公司电子科学研究院, 2019.
|
|
|
|
| [39] |
彭宏泽. 无人机组合导航与多机协同定位研究[D]. 长春: 吉林大学, 2023.
|
|
|
|
| [40] |
严恭敏, 翁浚. 捷联惯导算法与组合导航原理[M]. 西安: 西北工业大学出版社, 2019.
|
|
|
|
| [41] |
秦永元, 张洪钺, 王叔华. 卡尔曼滤波与组合导航原理[M]. 西安: 西北工业大学出版社, 2012.
|
|
|
|
| [42] |
doi: 10.3390/s23094366 URL |
| [43] |
doi: 10.1109/JSEN.2023.3258432 URL |
| [44] |
doi: 10.1109/TCST.2020.3027627 URL |
| [45] |
杨彬. 基于MDS的无人机群协同定位算法研究[D]. 西安: 西安电子科技大学, 2021.
|
|
|
| [1] | SHEN Cheng, ZHANG Lianchao, ZHANG Zhuo, ZHU Wenliang, CHEN Yukang. Fire Control Correction and Line-of-sight Filtering Prediction of Lightweight Ballistic Calculation System [J]. Acta Armamentarii, 2024, 45(2): 429-442. |
| [2] | CAO Jun, ZHENG Cui-e, SUN Da-jun, ZHANG Dian-lun. Research on the Positioning of Underwater Vehicle Based on Convex Optimization [J]. Acta Armamentarii, 2017, 38(3): 520-526. |
| [3] | WANG Jie, XIONG Zhi, XING Li, DAI Yi-jie, HUA Bing, LIU Jian-ye. Online Calibration of IMU errors of Inertial Navigation System Based on Innovation-based Adaptive Filtering [J]. Acta Armamentarii, 2016, 37(7): 1203-1213. |
| [4] | LIU Yong-qing, JIANG Shuo, YU Dong, SHAO Xiao-tian. Effect of Narrowband Interference Suppression on Pseudorandom Code Zero Value [J]. Acta Armamentarii, 2016, 37(2): 293-298. |
| [5] | YUE Kai, HAO Xin-hong, LI Ping, TAO Yan, LI Yong-liang. Research on Ranging Method for Linear Frequency Modulation Radio Fuze Based on Fractional Fourier Transform [J]. Acta Armamentarii, 2015, 36(5): 801-808. |
| [6] | ZENG Guang-yu, SHEN Qiang, LI Dong-guang, HE Xin. Modeling and Simulation on GNSS Vector Tracking Loop Based on Extended Kalman Filter [J]. Acta Armamentarii, 2015, 36(3): 530-538. |
| [7] | YU Hong-bo, WANG Guo-hong, ZHANG Zhong-kai. A RPHT-TBD Algorithm for Tracking and Detecting Maneuvering Weak Target via Airborne PD Radar [J]. Acta Armamentarii, 2015, 36(10): 1924-1932. |
| [8] | ZHAN Qi-dong, TU Ya-qing. [J]. Acta Armamentarii, 2014, 35(5): 748-752. |
| [9] | FENG Pu-wen, HUANG Chang-qiang, CAO Lin-ping, XIANG Meng, REN Yang. Research on Ballistic Missile Tracking Based on Adaptive Markov Parameter IMM [J]. Acta Armamentarii, 2014, 35(12): 2041-2049. |
| [10] | XU Bo, XIAO Yong-ping, GAO Wei, LIU Ya-long, YANG Jian. A Cooperative Navigation Approach and Its Verification of USVs with Leader-fellower Structure [J]. Acta Armamentarii, 2014, 35(11): 1836-1845. |
| [11] | XIANG Yu, MA Xiao-jun, LIU Chun-guang, KE Rong-shuo, ZHAO Zi-xu. Estimation of Model Parameters and SOC of Lithium Batteries Based on IPSO-EKF [J]. Acta Armamentarii, 2014, 35(10): 1659-1666. |
| [12] | LI Jie, LIU Jun . Design of Micro-electromechanical Systems Inertial Measurement Unit Structure for Guided Ammunition [J]. Acta Armamentarii, 2013, 34(6): 711-717. |
| [13] | LIU Jun-xing, ZHANG Xin-hua, QI Dun-hao, ZHANG Ben-hui. Trust Region Optimization Method for Single Hydrophone Passive Ranging [J]. Acta Armamentarii, 2012, 33(9): 1118-1123. |
| [14] | LI Guo-hui, LI Ya-an, YANG Hong. A Parameter Estimation and Filtering Method of Chaotic System Based on Particle Filter [J]. Acta Armamentarii, 2012, 33(12): 1504-1509. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||