
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (11): 3841-3855.doi: 10.12382/bgxb.2023.1085
Previous Articles Next Articles
WANG Wei1,2, YANG Jing1,2, NAN Yuxiang3, LI Junhui1,2, WANG Yuchen1,2,*( )
)
Received:2023-11-03
Online:2024-01-17
Contact:
WANG Yuchen
CLC Number:
WANG Wei, YANG Jing, NAN Yuxiang, LI Junhui, WANG Yuchen. Design of a Neural Network Acceleration Autopilot for Spinning Projectile Based on Adaptive Disturbance Observer[J]. Acta Armamentarii, 2024, 45(11): 3841-3855.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Schematic diagram of RBFNN

Fig.2 Schematic diagram of spinning projectile

Fig.3 Frame work of acceleration autopilot
| 观测器类别 | 观测器形式 | 参数取值 |
|---|---|---|
| FTDO | =v0-f1-b1u,v0=-λ2L1/3|z0-x|2/3sgn(z0-x)+z1 =v1,v1=-λ1L1/2|z1-v0|1/2sgn(z1-v0)+z2 =-λ0Lsgn(z2-v1) | zi(0),i=1,2 λ0=1.1,λ1=1.5,λ2=2 L=50 |
| FxTESO | =f1+b1u+α1si (x1-z1)+β1si (x1-z1) =α2si (x1-z1)+β2si (x1-z1)+γsign(x1-z1) | zi(0)=0,i=1,2,α1=3,β1=15 α2=1.5,β2=7.5,o1=0.9,θ1=1.01 o2=2o1-1,θ2=2θ1-1,γ=50 |
| AFxTSMDO | =z-x, =-f1-b1u-κ(sigp( )+sigq( ))+vd σ= +κ(sigp( )+sigq( )) =-κ(sigp(σ)+sigq(σ))-K(t)sgn(σ) (t)= | z(0)=0,vd(0)=0,κ=2,p=0.5 q=1.5,K(t)=0, =10,ε=0.1 |
Table 1 Parameters of observer
| 观测器类别 | 观测器形式 | 参数取值 |
|---|---|---|
| FTDO | =v0-f1-b1u,v0=-λ2L1/3|z0-x|2/3sgn(z0-x)+z1 =v1,v1=-λ1L1/2|z1-v0|1/2sgn(z1-v0)+z2 =-λ0Lsgn(z2-v1) | zi(0),i=1,2 λ0=1.1,λ1=1.5,λ2=2 L=50 |
| FxTESO | =f1+b1u+α1si (x1-z1)+β1si (x1-z1) =α2si (x1-z1)+β2si (x1-z1)+γsign(x1-z1) | zi(0)=0,i=1,2,α1=3,β1=15 α2=1.5,β2=7.5,o1=0.9,θ1=1.01 o2=2o1-1,θ2=2θ1-1,γ=50 |
| AFxTSMDO | =z-x, =-f1-b1u-κ(sigp( )+sigq( ))+vd σ= +κ(sigp( )+sigq( )) =-κ(sigp(σ)+sigq(σ))-K(t)sgn(σ) (t)= | z(0)=0,vd(0)=0,κ=2,p=0.5 q=1.5,K(t)=0, =10,ε=0.1 |

Fig.4 State estimationand tracking error bound for Case 1

Fig.5 Disturbance estimation and tracking error bound for Case 1

Fig.6 Adaptive gain for Case 1
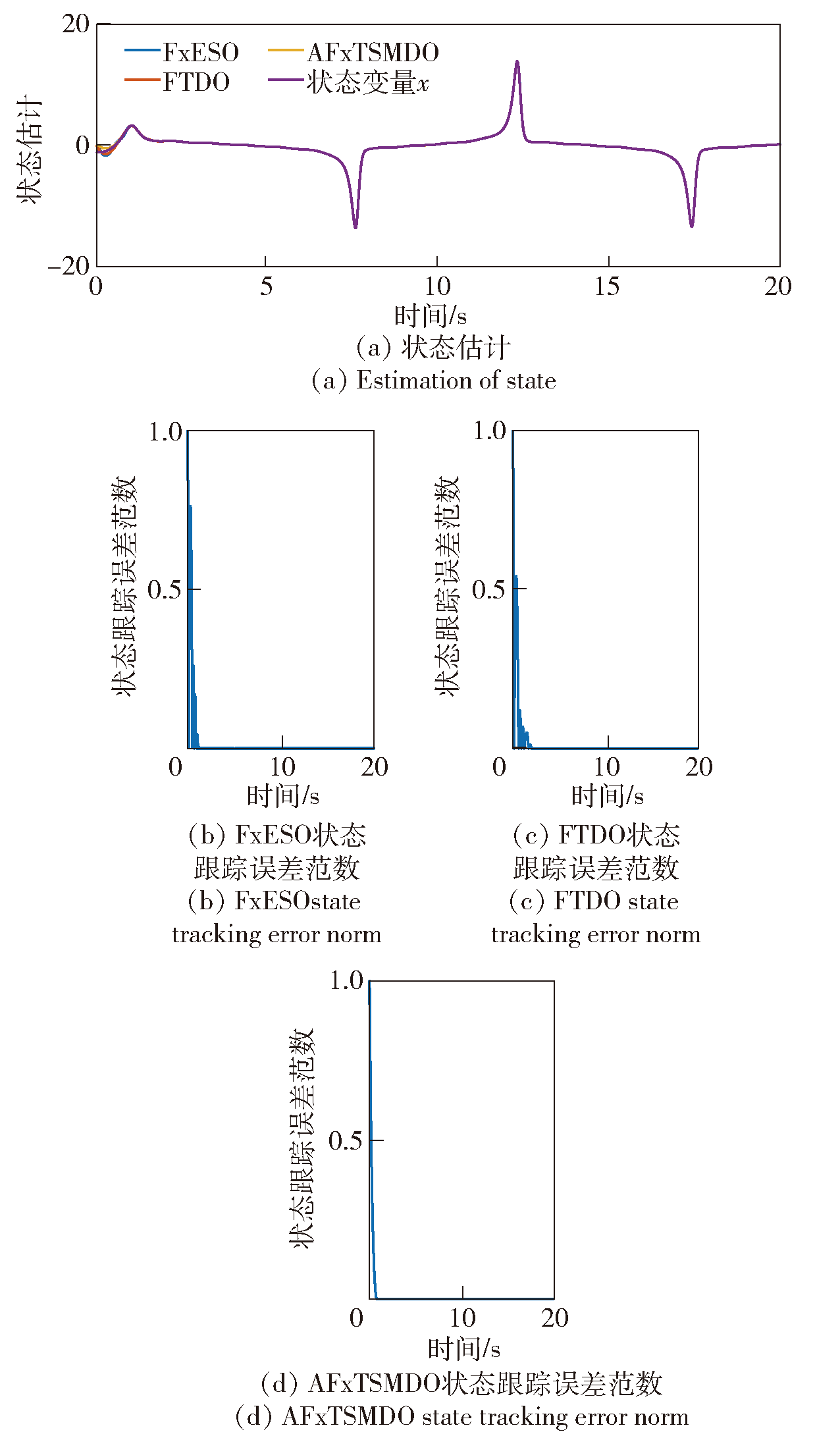
Fig.7 State estimationand tracking error bound for Case 2

Fig.8 Disturbance estimation and tracking error bound for Case 2

Fig.9 Adaptive gain K(t) for Case 2
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| bL | 1.1240 | aG | 0.0791 |
| bM | 7.667×10-4 | v/(m·s-1) | 1200 |
| aL | 140.6137 | ks | 10 |
| aM | -7.1831 | μs | 0.5 |
| aω | 2.4018 | Ts/s | 0.016 |
| aδ | -11.6520 | τ/s | 0.015 |
Table 2 Aerodynamic parameters of spinning projectile
| 参数 | 取值 | 参数 | 取值 |
|---|---|---|---|
| bL | 1.1240 | aG | 0.0791 |
| bM | 7.667×10-4 | v/(m·s-1) | 1200 |
| aL | 140.6137 | ks | 10 |
| aM | -7.1831 | μs | 0.5 |
| aω | 2.4018 | Ts/s | 0.016 |
| aδ | -11.6520 | τ/s | 0.015 |
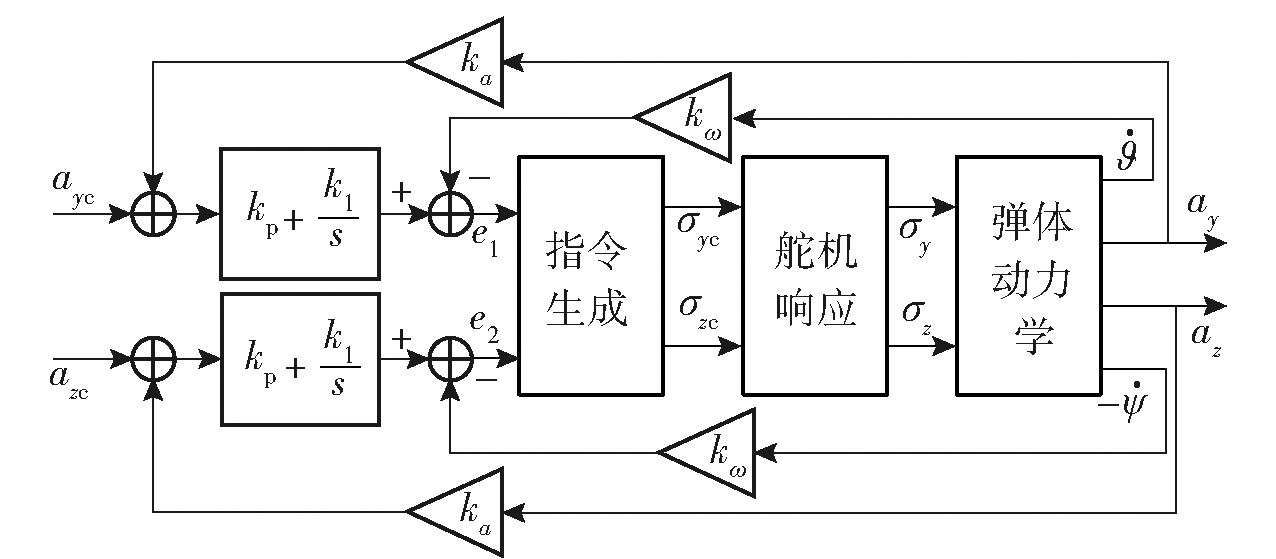
Fig.10 Scheme of dual-channel controlled PI acceleration autopilot

Fig.11 Tracking result of acceleration

Fig.12 Accelerations tracking error

Fig.13 Tracking result of accelerations

Fig.14 Actuator deflection commands

Fig.15 Disturbance estimation of acceleration loop

Fig.16 Disturbance estimation of attitude loop

Fig.17 Weights updating of the NN of acceleration loop

Fig.18 Weights updating of the NN of attitude loop
| [1] |
杨树兴. 陆军多管火箭武器的发展与思考[J]. 兵工学报, 2016, 37(7): 1299-1305.
doi: 10.3969/j.issn.1000-1093.2016.07.019 |
|
|
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
石忠佼, 朱化杰, 赵良玉, 等. 考虑舵机动力学的旋转弹自适应解耦控制[J]. 航空学报, 2022, 43(3): 325068-1-325068-11.
|
|
|
|
| [14] |
|
| [15] |
|
| [16] |
王雨辰, 林德福, 王伟, 等. 大跨域条件下的自适应滚转稳定容错控制方法[J]. 航空学报, 2021, 42(3): 324368-1-324368-10.
|
|
|
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
胡伟, 万文章, 陈谋. 基于神经网络和干扰观测器的UAV自动着舰控制[J]. 航空学报, 2022, 43(增刊1): 726963-1-726963-10.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [29] |
|
| [30] |
|
| [31] |
|
| [32] |
|
| [33] |
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||