
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (S2): 61-70.doi: 10.12382/bgxb.2023.0898
Special Issue: 群体协同与自主技术
Previous Articles Next Articles
MU Lindong1,2, ZHAO Xinlei1,2, XU Peng1,2, QIU Tianqi1,2, JIANG Lei1,2,*( )
)
Received:2023-09-11
Online:2024-01-10
Contact:
JIANG Lei
CLC Number:
MU Lindong, ZHAO Xinlei, XU Peng, QIU Tianqi, JIANG Lei. Two-wheeled Power-assist Trailer Payload Based on Force Control[J]. Acta Armamentarii, 2023, 44(S2): 61-70.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Typical wheel-legged robot

Fig.2 Small electric transport vehicles at home and abroad
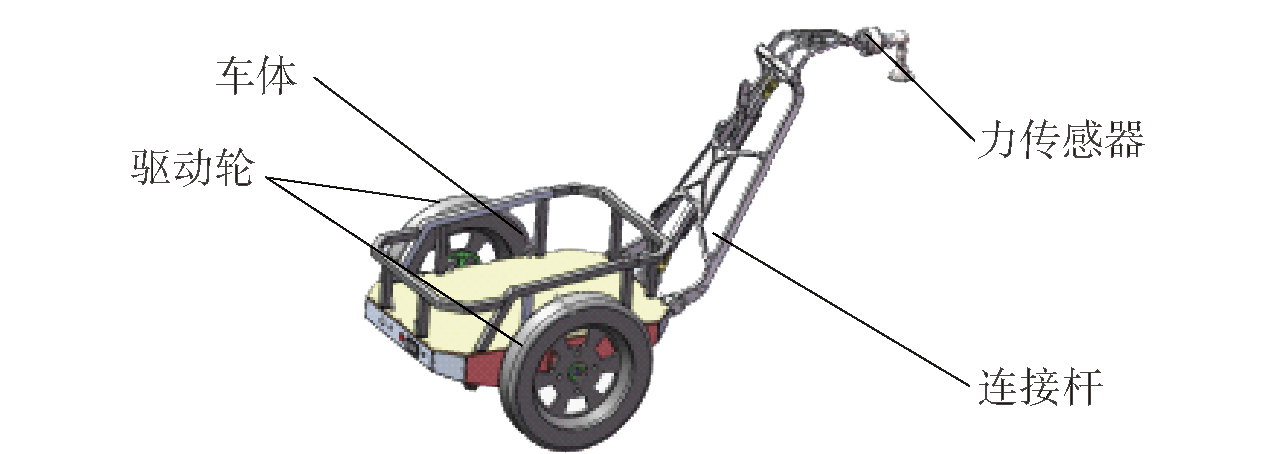
Fig.3 Overall structure diagram of trailer robot
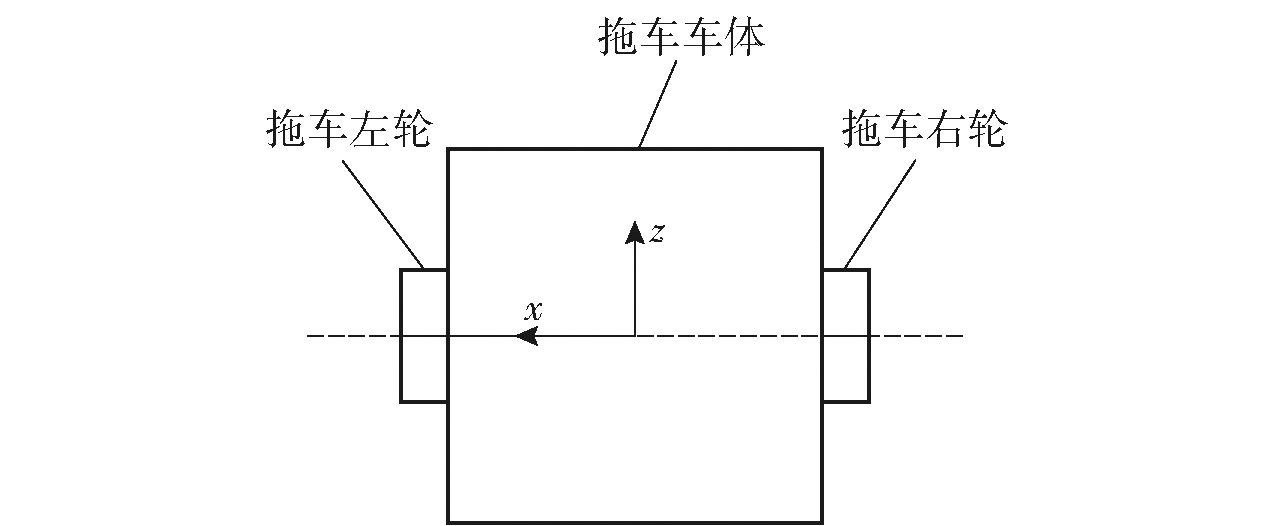
Fig.4 Simplified mechanism model of trailer
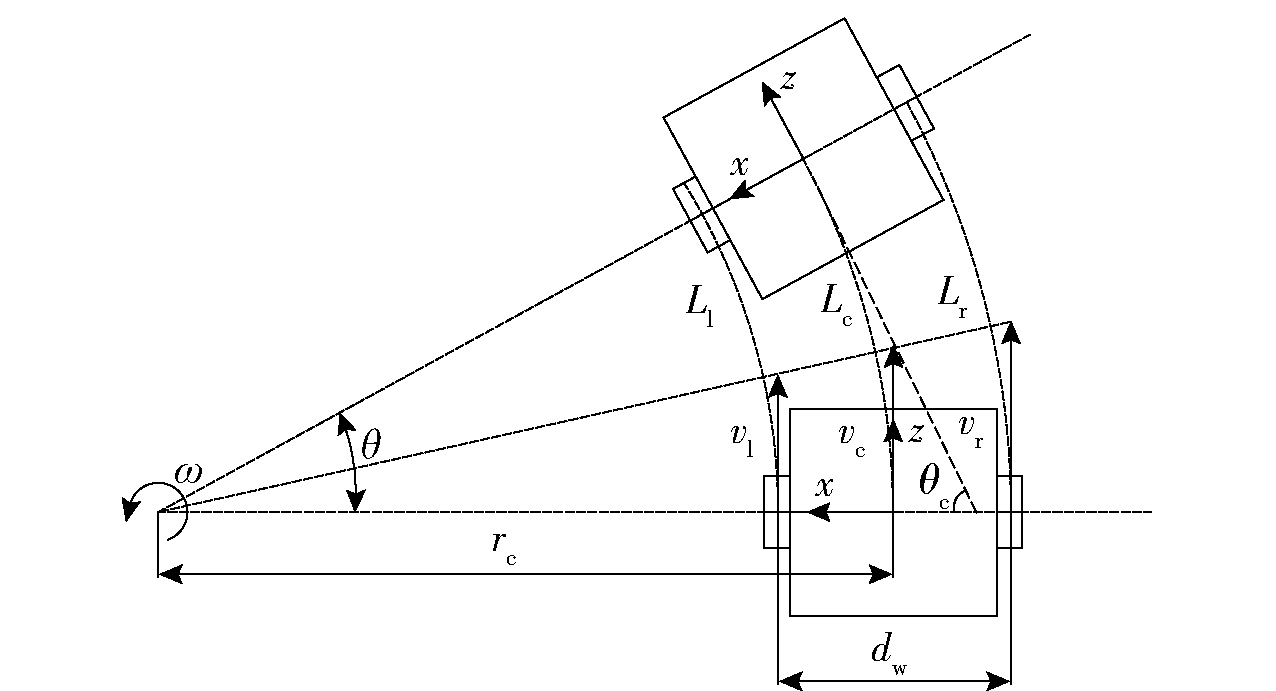
Fig.5 Differential motion model of two-wheel trailer
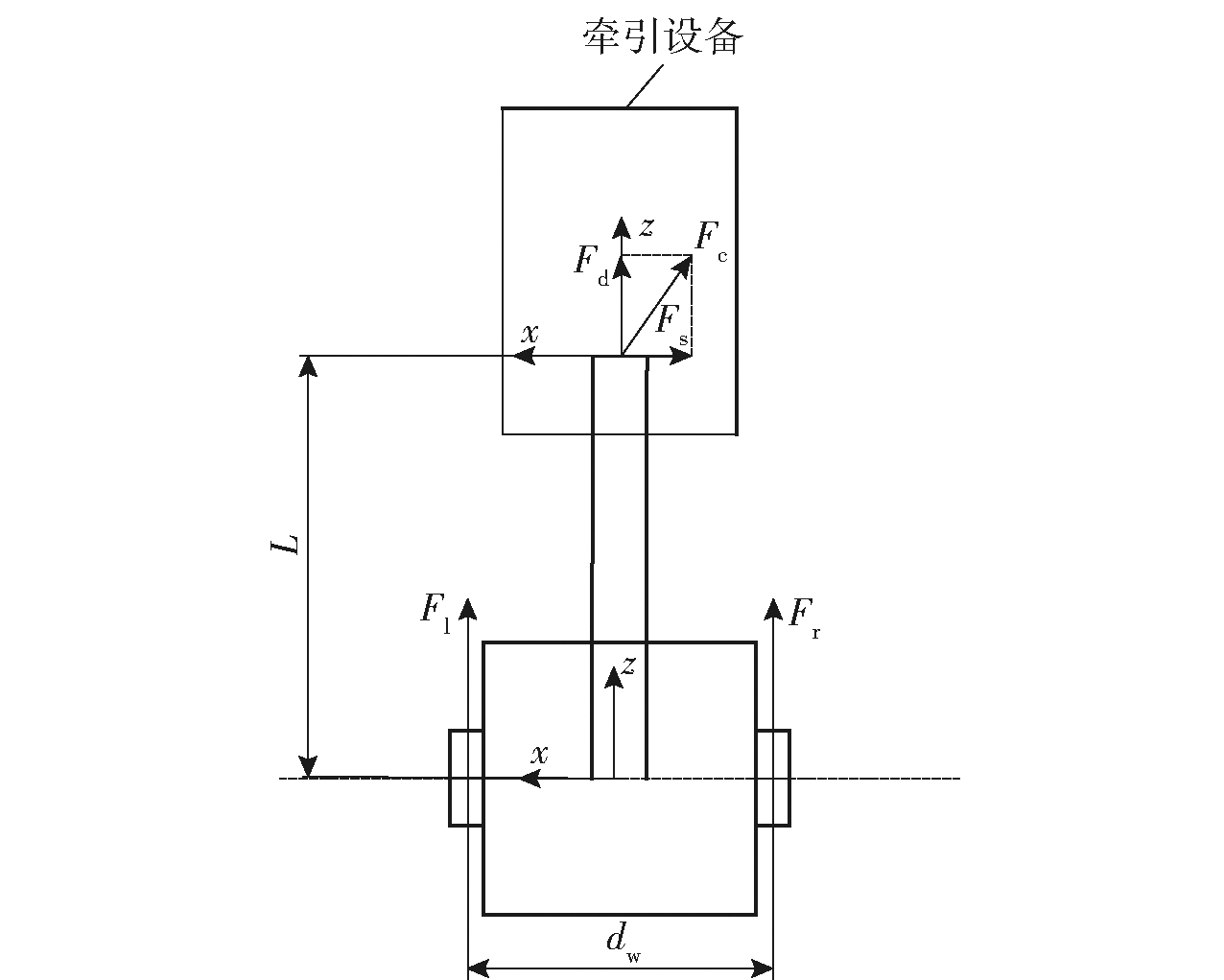
Fig.6 Simple mechanism model of two-wheel trailer system
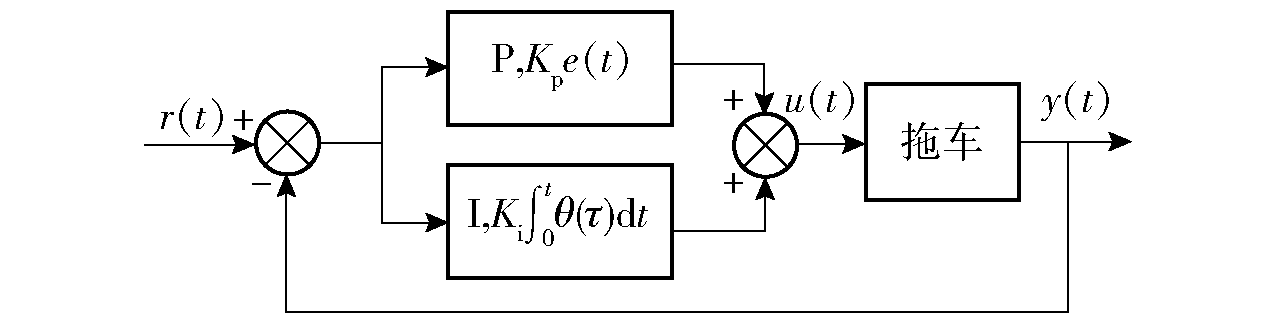
Fig.7 Block diagramof control system of trailer robot
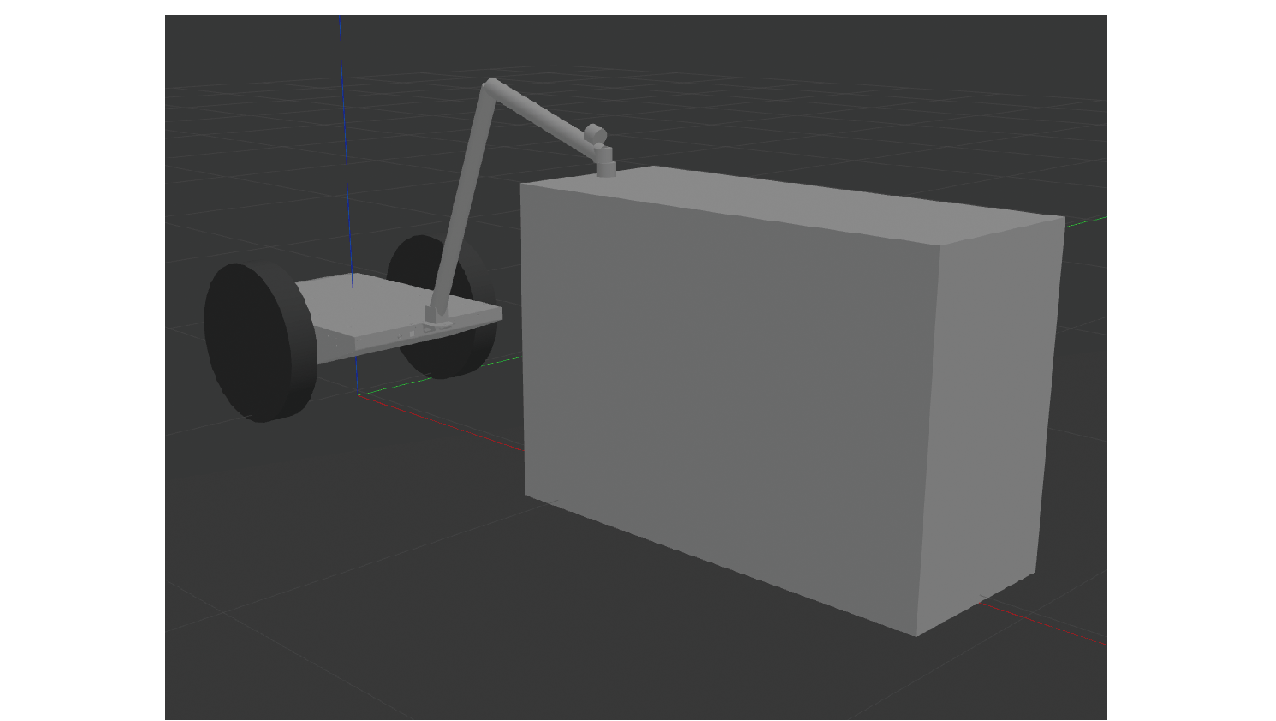
Fig.8 Simulation model of trailer robot (including traction slider)
| 参数 | 数值 |
|---|---|
| 弹性系数 | 200000.0 |
| 阻尼系数 | 150.0 |
| 滑动摩擦因数 | 1.0 |
Table 1 Contact parameters of tire
| 参数 | 数值 |
|---|---|
| 弹性系数 | 200000.0 |
| 阻尼系数 | 150.0 |
| 滑动摩擦因数 | 1.0 |
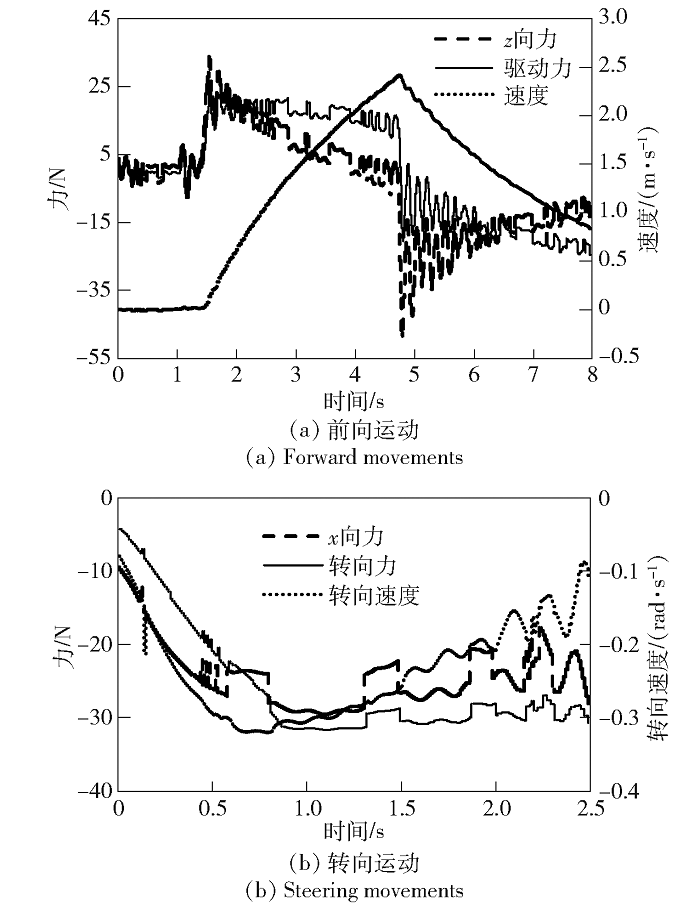
Fig.9 Motion simulation data of trailer robots

Fig.10 Overall structure of trailer robot (including schematic load)
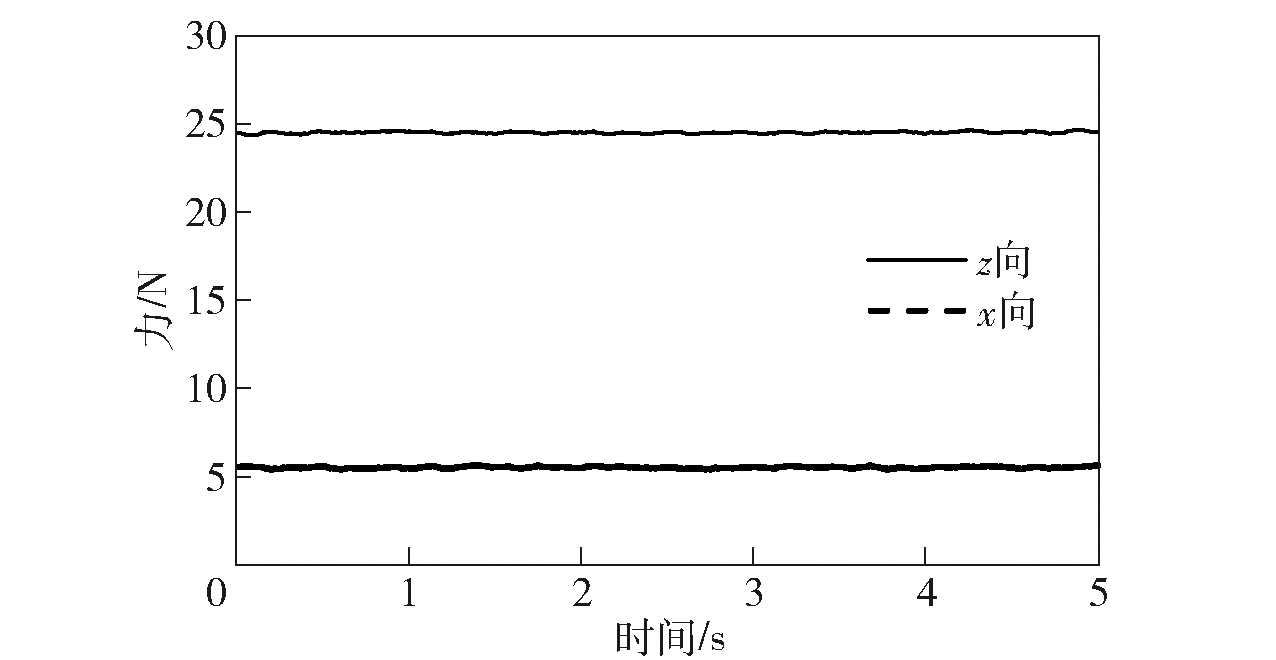
Fig.11 Force sensor data in the static state
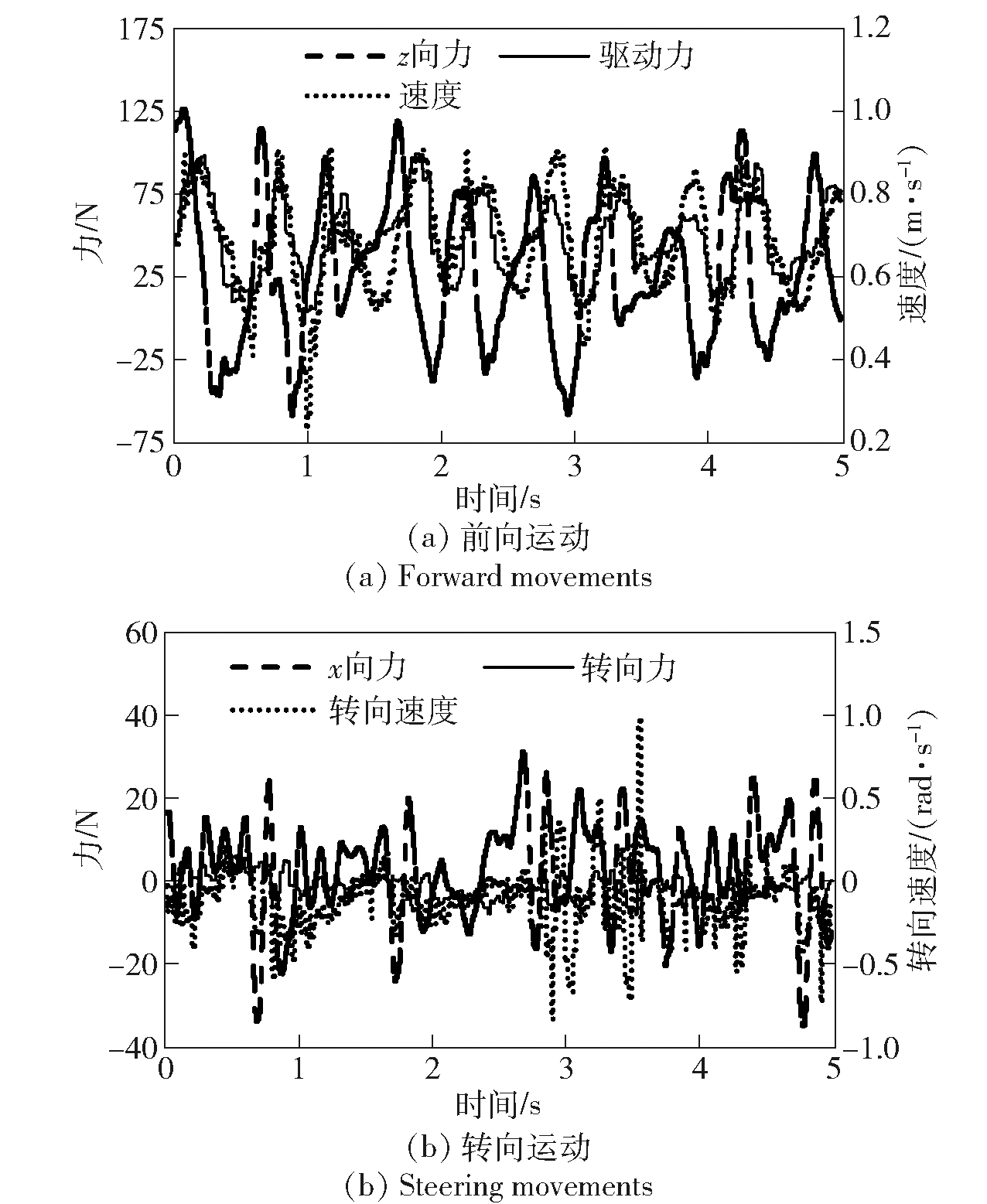
Fig.12 Test data of trailer robot traction on horizontal ground
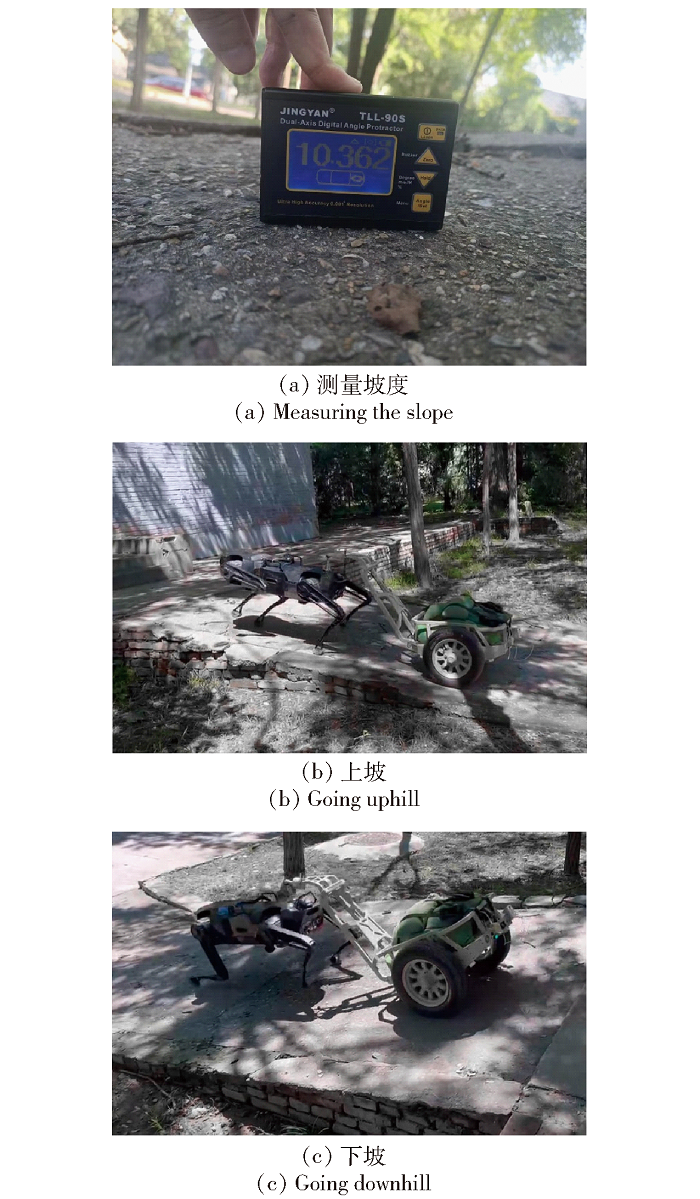
Fig.13 Uphill and downhill traction test of trailer robots
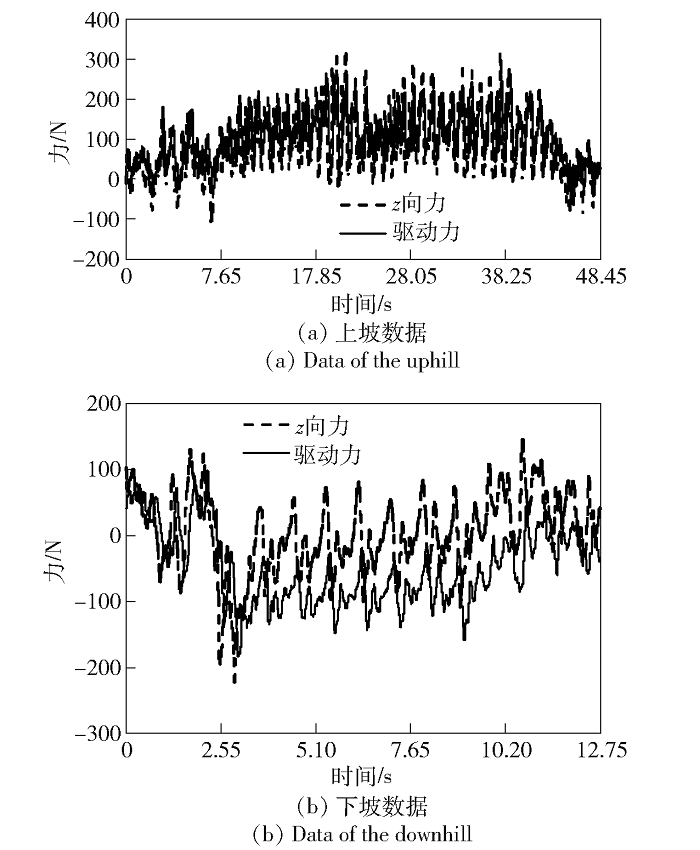
Fig.14 Uphill and downhill traction test data of trailer robots

Fig.15 Off-road traction test of trailer robots
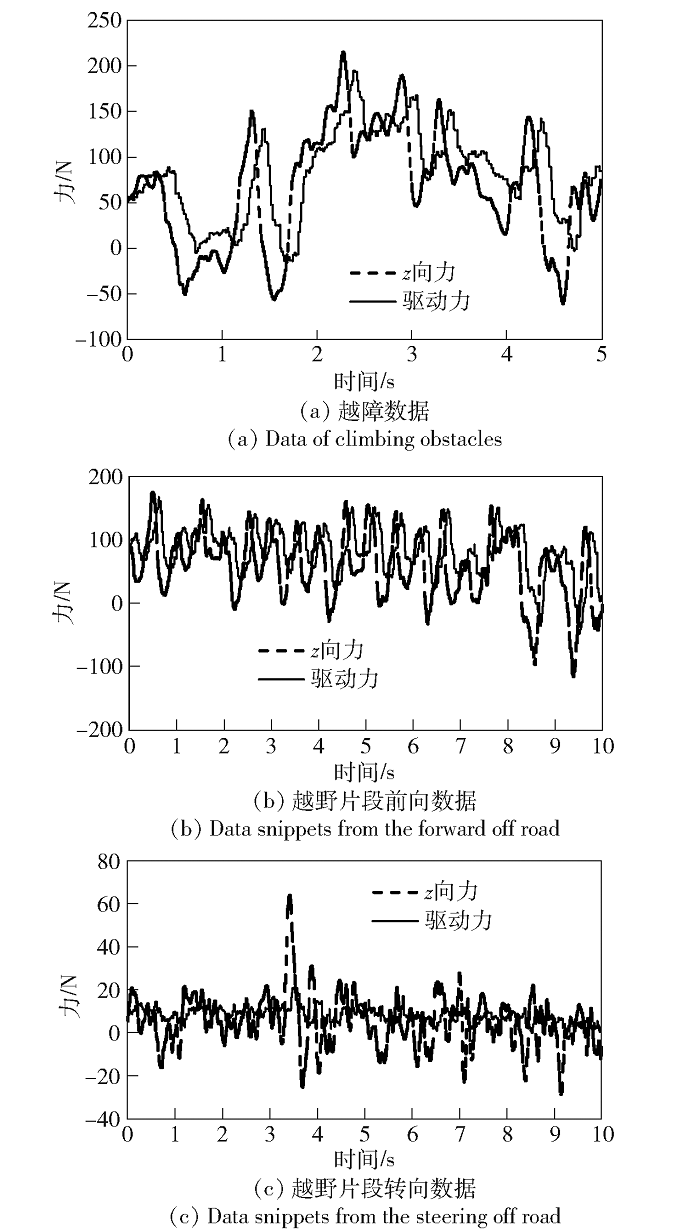
Fig.16 Off-road traction test data of trailer robots
| [1] |
魏庆生. 四足机器人设计与运动控制仿真研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
|
|
|
|
| [2] |
闫曈, 许威, 苏波. 基于ZMP的四足仿生机器人反应式行为控制策略研究[J]. 车辆与动力技术, 2021(1): 1-7.
|
|
|
|
| [3] |
许威, 苏波, 江磊, 等. 足式越野机器人集群系统关键技术与应用展望[J]. 兵工学报, 2023, 44(9): 2568-2579.
doi: 10.12382/bgxb.2023.0445 |
|
|
|
| [4] |
苏波, 闫曈, 许威, 等. 四足机器人高机动越野技术研究[J]. 中国科学: 技术科学, 2023, 53(9):1574-1588.
|
|
|
|
| [5] |
安国鹏. 基于五杆机构四足机器人结构设计与步态实验研究[D]. 重庆: 重庆大学, 2020.
|
|
|
|
| [6] |
廖绍辉. 基于零力矩点的四足轮腿机器人运动轨迹规划研究[D]. 成都: 电子科技大学, 2022.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
doi: 10.2478/amtm-2019-0004 URL |
| [10] |
doi: 10.2507/IJSIMM URL |
| [11] |
doi: 10.1109/ACCESS.2021.3062392 URL |
| [12] |
马勤勇. 两轮差速驱动移动机器人运动模型研究[D]. 重庆: 重庆大学, 2013.
|
|
|
|
| [13] |
doi: 10.1016/j.actaastro.2022.01.025 URL |
| [14] |
|
| [15] |
SteedTM silent tactical energy enhanced dismountEB/OL 2023-08-15. https://static1.squarespace.com/static/5e16132403e4cf0c9c5bf77e/t/60bf691bded9074b99a252af/1623157021541/200904+STEED+Handout+Web.pdf
|
| [16] |
李国. 一种应急抢险携行车: 中国, 202111210060.2[P]. 2023-09-01.
|
|
|
|
| [17] |
张雷雨, 张新尚, 孙旭, 等. 一种军用多功能助力拖车:中国, 202310452712[P]. 2023-09-01.
|
|
|
|
| [18] |
李艺青, 王建军, 郁万涛. 两轮差速移动机器人构型与运动学研究[J]. 成都航空职业技术学院学报, 2022(4):59-62.
|
|
|
|
| [19] |
冉松. 两轮差速移动机器人仿人智能自适应 Backstepping 点镇定控制[D]. 重庆: 重庆大学, 2018.
|
|
|
|
| [20] |
马艳菊. 电动助力车控制技术研究[D]. 杭州: 杭州电子科技大学, 2018.
|
|
|
|
| [21] |
刘金琨. 先进 PID 控制 MATLAB 仿真[M]. 北京: 电子工业出版社, 2004.
|
|
|
|
| [22] |
黄卫华. 模糊控制系统及应用[M]. 北京: 电子工业出版社, 2012.
|
|
|
|
| [23] |
Gazebo: tutorial: physics parametersthe gazebo robot simulation[EB/OL].(2020-04-24)[2023-08-18]. http://gazebosim.org/tutorials?tut=physics_params&cat=physics.
|
| [24] |
朱成伟. 汽车轮胎稳态滚动阻力建模及实验分析[D]. 长春: 吉林大学, 2021.
|
|
|
|
| [25] |
哈斯巴根. 子午线轮胎静动态特征仿真分析及优化设计[D]. 合肥: 合肥工业大学, 2016.
|
|
|
|
| [26] |
任洁雨. 子午线轮胎结构设计及其对力学特性影响研究[D]. 镇江: 江苏大学, 2015.
|
|
|
|
| [27] |
李韶华, 周军魏, 张志达. 轮胎三向动态特性试验及非线性建模[J]. 机械工程学报, 2018, 54(18): 85-96.
doi: 10.3901/JME.2018.18.085 |
|
doi: 10.3901/JME.2018.18.085 |
|
| [28] |
|
| [1] | GAO Pu, LI Hongcai, LIU Hui, MENG Jieke. Analysis on Dynamic Characteristics of External Oil Pipe System of Integrated Transmission Device in Armoured Vehicle [J]. Acta Armamentarii, 2023, 44(11): 3447-3454. |
| [2] | ZHEN Wen-qiang, JI Yong-qiang, SHI Yun-guo. Dynamic Simulation and Experimental Study of Deployment Process of Missile Folding-wing [J]. Acta Armamentarii, 2016, 37(8): 1409-1414. |
| [3] | LYU Xiao-chen, LI Guo-xiu, SUN Zuo-yu, GAO Qing-xiu , WANG Jie, HE Shuang-yi, CUI Sui-xian. Effect of High Pressure Fuel Pipe Structure on Performance of Electronic Unit Pump Fuel System [J]. Acta Armamentarii, 2016, 37(10): 1778-1787. |
| [4] | SONG Qiu-zhi, WANG Xiao-guang, WANG Xin, WANG Yang. Development of Multi-joint Exoskeleton-assisted Robot and Its Key Technology Analysis: an Overview [J]. Acta Armamentarii, 2016, 37(1): 172-185. |
| [5] | LI Jia-sheng, QIU Ming, LIAO Zhen-qiang, XIAN Dong-peng, SONG Jie. Dynamic Modeling and Simulation of Gatling Gun with Muzzle Assistant-Rotating and Recoil Absorber [J]. Acta Armamentarii, 2014, 35(9): 1344-1349. |
| [6] | HUANG Xue-tao, GU Liang, LYU Wei-wei, YANG Cong-bin, GAO Xiao-dong, ZHU Xing-gao. Track Tension and Its Influencing Factors [J]. Acta Armamentarii, 2014, 35(7): 1110-1118. |
| [7] | FAN Bao-wei, PAN Jian-feng , CHEN Rui, LIU Yang-xian, TANG Ai-kun, WANG Qian. Effect of Ignition Advance Angles on Combustion Process in Natural Gas-fueled Rotary Engine [J]. Acta Armamentarii, 2014, 35(1): 1-8. |
| [8] | REN Kai, YANG Li, PU Jin-yun, SU Xue-rong. An Interactive Virtual Compartment Fire Extinguishing Model Based on System Dynamic Characteristic [J]. Acta Armamentarii, 2013, 34(9): 1137-1143. |
| [9] | ZHANG Guo-qing, LI Guang-wei, WANG Cheng-tao, XU Bin-shi. Fatigue Life Prediction of Crankshaft Repaired by Arc Spraying [J]. Acta Armamentarii, 2013, 34(3): 324-331. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||